馬鈴薯收獲機械的研究與發展
2015-10-22 06:26:42金英慧
邢臺職業技術學院學報 2015年3期
關鍵詞:機械
金英慧
(遼寧省農機質量監督管理站,遼寧 沈陽 110034)
馬鈴薯收獲機械的研究與發展
金英慧
(遼寧省農機質量監督管理站,遼寧 沈陽 110034)
本文介紹了馬鈴薯收獲機的類型及特點,簡述了國內外馬鈴薯收獲機械的研究狀況,分析了我國馬鈴薯收獲機械發展中存在的主要問題,提出了發展對策及建議,為我國馬鈴薯收獲機械的研究與發展提供參考。
馬鈴薯收獲機械;研究;發展
馬鈴薯屬于薯類作物的一種,據統計2000年全世界的薯類作物總種植面積為5 149萬公頃,總產量為67 467萬噸,全世界薯類生產國有140多個,主要分布在亞洲、非洲、歐洲及美洲等地。近年來,馬鈴薯的用途和地位已經發生了變化,如在我國其既是糧食,又是飼料和工業原料。在農業生產中,對馬鈴薯的種植、收獲和產后加工等各個生產環節越來越重視[1]。例如以往收獲環節完全靠人工,勞動強度大、生產效率低,因而各類馬鈴薯輔助收獲機械得到了廣泛的關注。
一、馬鈴薯收獲機械的類型及特點
以收獲工藝過程和完成程度劃分,馬鈴薯收獲機械可分為挖掘犁、挖掘機和聯合收獲機。此外,莖葉收獲的機械也可單獨劃為一類。
1.挖掘犁
挖掘犁是一種較為簡單實用的挖掘機具,如圖1所示。通過用挖掘犁實現薯塊與土壤分離的同時,實現把大部分薯塊翻到地表,然后再輔以人工完成收獲工作。
2.挖掘機
挖掘機是在挖掘犁上附加分離部件組成,按分離方式,可分為拋擲輪式、升運鏈式和振動篩式。
(1)拋擲輪式挖掘機
拋擲輪式挖掘機結構如圖2所示。其工作時挖掘鏟將土垡掘起,通過拋擲輪撥齒的作用,將土垡拋到機器一側,使薯塊散落于地表,為避免薯塊過于分散,挖掘機在工作時都帶有擋簾。
拋擲輪上撥齒的連接形式有剛性連接和鉸接連接兩種。撥齒剛性連接的拋擲輪有圓柱形和圓錐形,如圖2所示。具有鉸接式撥齒的拋擲輪,沒有撥齒的導向機構,并可分為偏心輪式和滑桿式兩種。其中,前者撥齒傾角在整個運動過程中保持不變,后者在運動過程中撥齒左右擺動,即拋擲輪轉一周時,撥齒擺動一次。具有撥齒導向機構的挖掘機能夠縮小薯塊拋扔距離和減少薯塊的損傷。
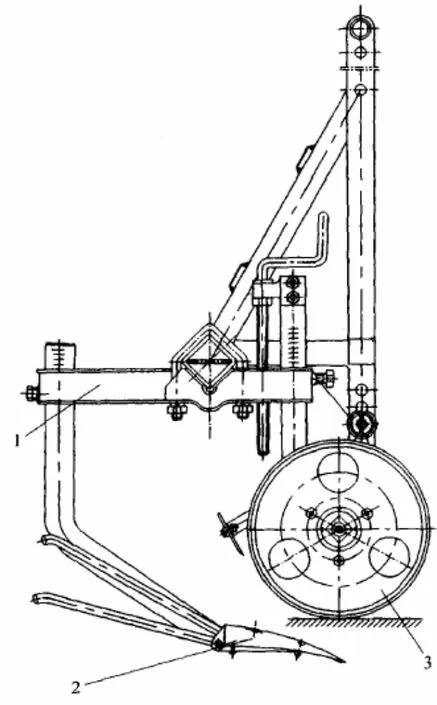
圖1 雙行馬鈴薯挖掘犁
(2)升運鏈式挖掘機
升運鏈式挖掘機的結構圖如圖3所示。其以桿條為升運機構,當挖掘鏟將薯塊同土壤一并送至桿條上,通過邊抖動邊輸送的方式,把大部分泥土從桿條間篩下,以分離出薯塊后在機器后部鋪放成條,薯塊挖出后為便于用人工或機器撿拾和裝運,機器裝有固定式或者可調開度的集條器。有的挖掘機還設有橫向集條輸送器,后面有時配掛帶有選別臺的拖車,在這里用人工排除莖葉和雜物,把薯塊裝入袋中。
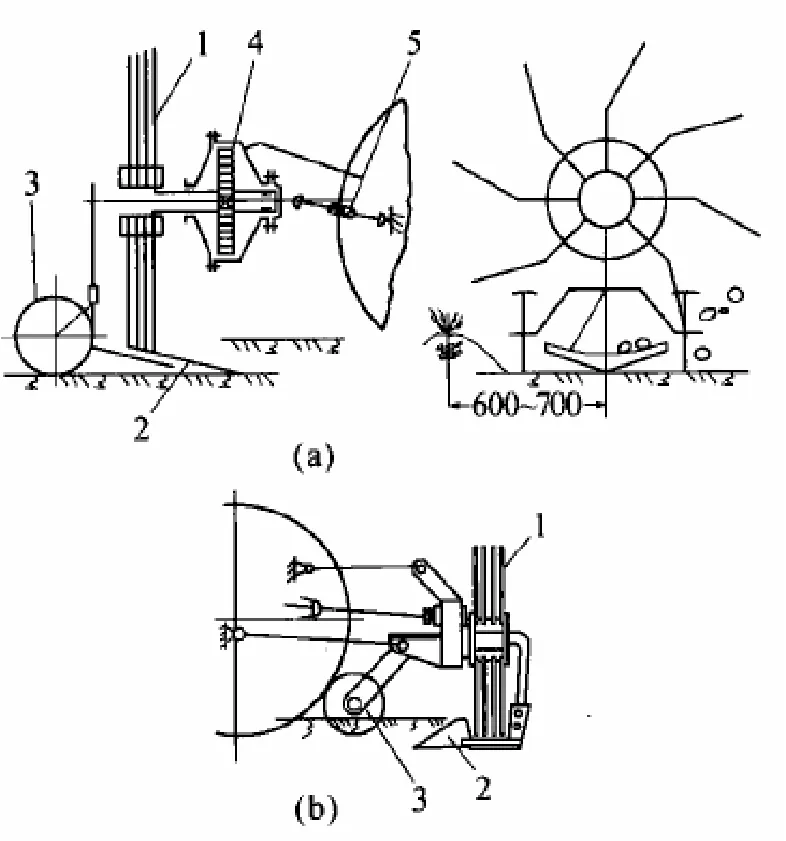
圖2 拋擲輪式挖掘機
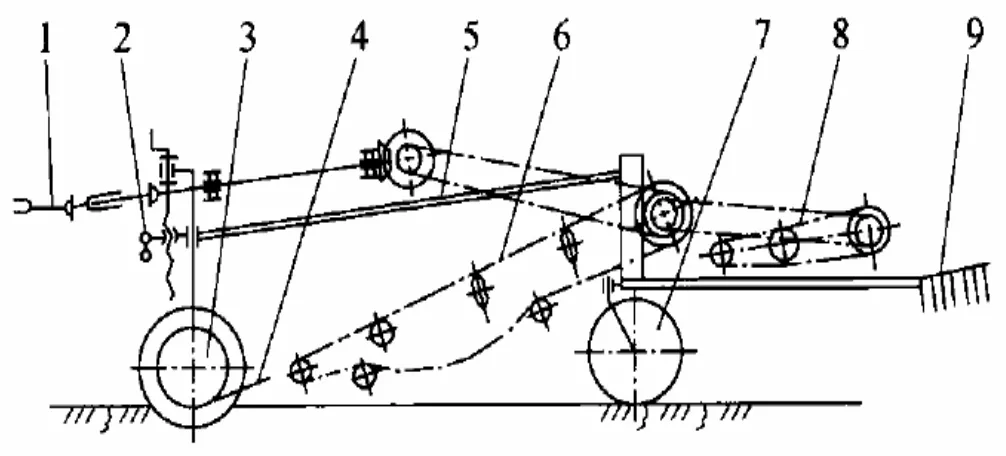
圖3 升運鏈式挖掘機
(3)振動篩式挖掘機
振動篩式挖掘機的結構如圖4所示,由兩個篩子前后配置組成分離機構。挖掘鏟位于第一個篩的前端,由曲柄連桿機構使之振動。其工作過程與升運鏈式相似。
振動式挖掘鏟的牽引阻力比固定式挖掘鏟小40%-50%,若將振動消耗的能量計算在內,實際上總功率消耗并不少;相比較而言吊掛篩的振動式挖掘機分離能力強,同時工作時振動強烈,因而要求機架及相關部件能抗劇烈震動。
3.聯合收獲機
聯合收獲機是挖掘機的進一步改進,通過增設相關工作部件以完善馬鈴薯收獲的全部工序。其將挖掘帶薯塊的土垡,分離碎土、土塊和石頭,把排除莖葉和雜物的薯塊裝袋連接起來一次完成,還可將成袋的薯塊直接裝到運輸車上。此外,薯類作物收獲機也可用來撿拾在地上鋪放成條的薯塊。
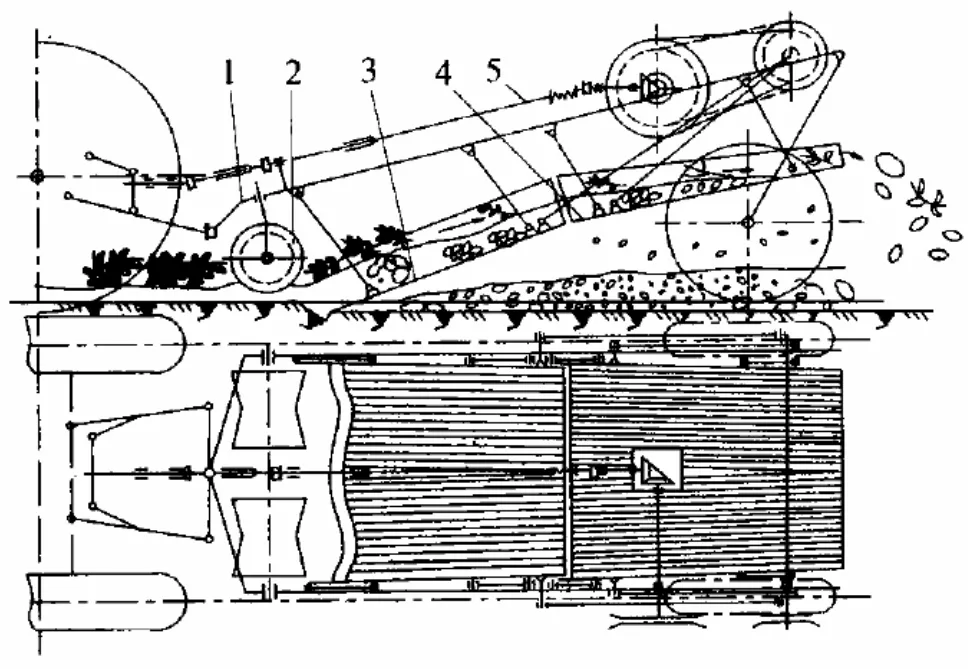
圖4 采用吊掛篩的振動式挖掘機
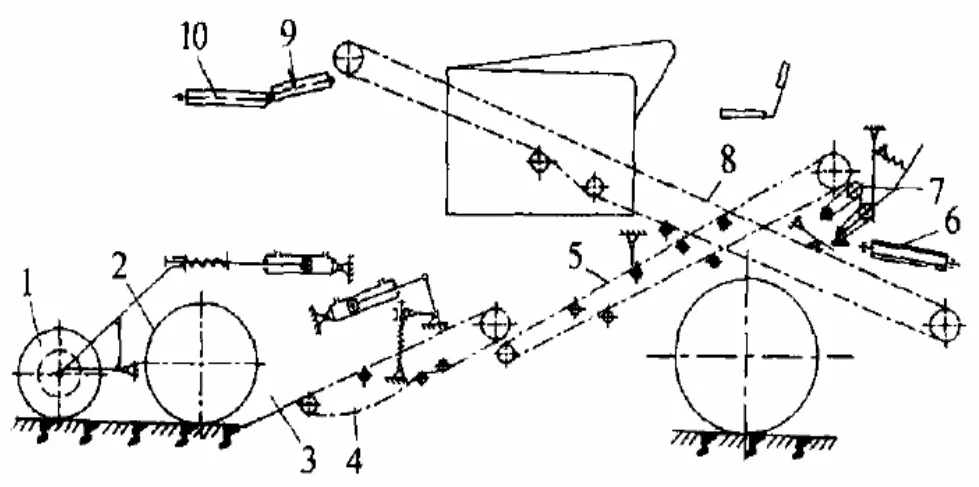
圖5 升運鏈式聯合收獲機
以分離部件的型式劃分,聯合收獲機可分為升運鏈式、擺動篩式和滾筒篩式,如圖5、圖6和圖7所示。其應用效果受土壤條件影響較大,土壤疏松則會完成作業質量產生良好的經濟效果。在土壤黏、石頭多和雜草多的情況下,其效果則不盡人意。此時可增設人工選別臺,通過人工輔助清理作業。近年來,一些聯合收獲機開始采用光電選別裝置,用于分離薯塊中的石頭和土塊。另外,廣泛應用液壓來控制機器轉向和工作部件的升降,個別的還設有液壓調平機構,以適應在坡地上的作業。
二、國內外發展狀況
1.國外馬鈴薯收獲機械發展狀況
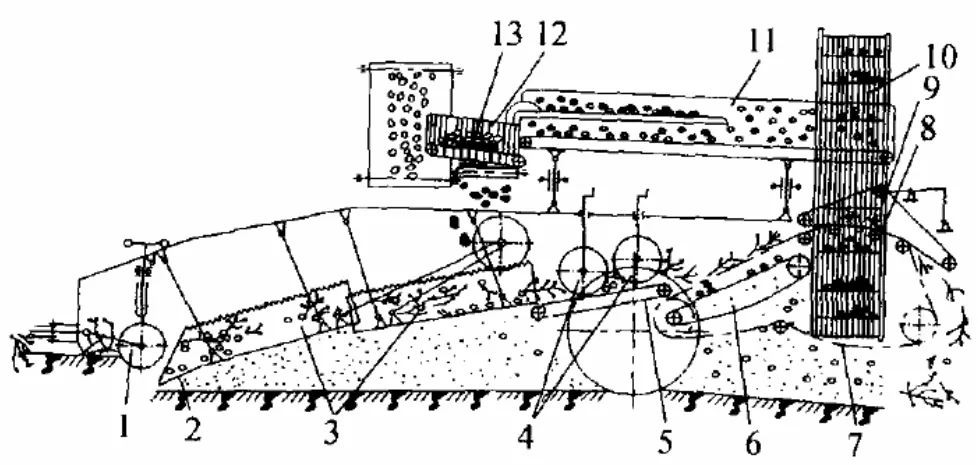
圖6 擺動篩式聯合收獲機
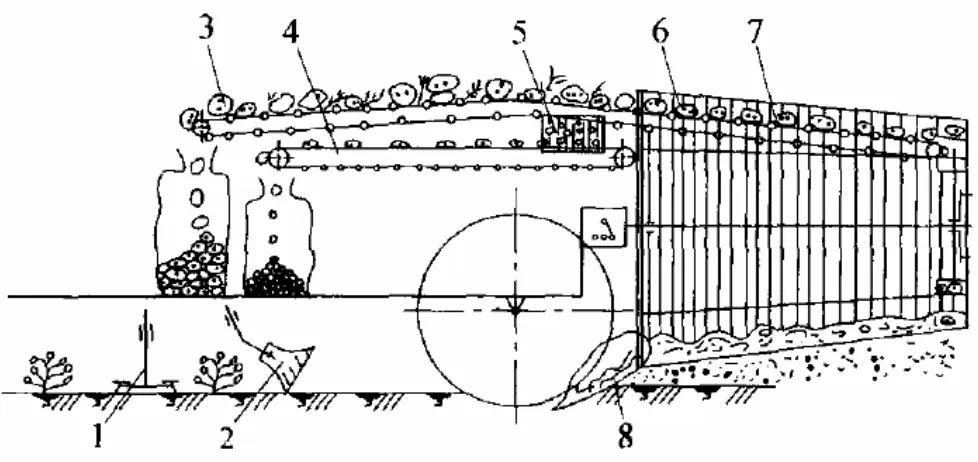
圖7 滾筒篩式聯合收獲機
馬鈴薯收獲機的研究可以從1868年埃格柏特·考比林斯基算起,其設計制造了一個簡易的挖掘犁,而馬鈴薯收獲機械的飛速發展期實際也就是100多年的歷史[2]。目前歐美研制的聯合收割機的顯著特點是功率大、工藝全,一次可以完成切秧、挖掘、分離、篩選、分級和提升卸料等收獲作業各個環節。另一個顯著特點是專用化、標準化和系列化。世界著名的農機公司都在歐美,如:美國的LENCO公司、DoubleL公司、CRARY公司,德國的格力莫(GRMME)公司、ROPA公司,比利時的AVR公司、DEWULF公司,意大利的MAC公司等[3]。
各公司生產的產品基本上都實現了品種全、成系列。一般有自走式和牽引式兩種。這類產品的基本工作原理并沒有根本的發展,各個廠家主要是將成熟的技術應用到聯合收割機上,如:自動化控制、液壓系統等技術的集成,同時,提高薯塊分離效率以及減少薯塊損傷等也為各個廠家所探索追求的目標,展開了深入研究。近年來,隨著GPS技術的民用普及,聯合收割機加裝GPS定位系統,輔以地理信息系統以進一步實現收獲面積的自動生成、產量的自動分析。如Standen的產品以集機械、液壓和電控為一體為其顯著的技術特征,CRARY公司產品的突出特點是配備了大容量的風力清選系統,AMAC公司則以操縱靈活舒適所見長[4]。
與歐美相比較,亞洲只有中日韓在研究生產一些小型馬鈴薯收獲機械。如韓國高山機械公司的單行馬鈴薯收獲機,日本的根菜收獲機械的設計思路主要來自于馬鈴薯收獲機。
雖然,國外的一些廠家的產品發展至今日已趨成熟,但是我國幅員遼闊,環境差異大,尚很難從這些產品選出一款產品能適應我國不同地區的耕地條件和農藝要求。另外,國外產品一般都價格昂貴、作業成本高,造成了推廣難度大,同時售后服務及相關配件供應渠道不暢等現實問題都不同程度的存在。
2.國內馬鈴薯收獲機械發展狀況
中國馬鈴薯收獲機的發展是在仿制的基礎上,結合我國不同地域的特點進行改進,以適應不同的生產需求。按鋪放方式可分為側輸與后輸兩種方式,如中機美諾公司的1700型馬鈴薯收獲機是一種具有代表性的側輸機型,其結構簡單緊湊,可連續完成挖掘、分離和側向鋪放作業,但沒有設計升運裝車部件。后輸機型主要是仿造TIP公司的牽引式兩行后輸出收獲機,采用獨立小鏟,碎土效果較好,尾部設有前后運動的振動篩,可進行二次分離,總體而言,這種機型實用性和性價比較好,市場上較受用戶歡迎,但由于材料及工藝差距,在作業時經常發生故障[5]。
近年來,通過充分吸收國外先進技術,中國農業機械化科學研究院設計了一種功能較為齊全的馬鈴薯收獲機,可針對壟作或平作馬鈴薯進行挖掘、分土、摘薯、排莖,還可進行集薯和堆放等作業,具有較好地推廣應用前景。
中機美諾的1710型是一種獲得市場認可的牽引式馬鈴薯聯合收獲機,該機實現了挖掘、輸送、分離、除秧、升運、裝車的一次完成,其綜合了挖掘機和分段收獲機,提高了工作效率,降低了塊莖損傷。
目前國內馬鈴薯收獲機市場上的主流產品仍以中小型為主,產品的提升空間廣闊,尤其是在自走式馬鈴薯收獲機的研發方面我國還基本處于空白階段[6-7]。
三、存在的主要問題
由于我國在馬鈴薯收獲機方面的研究還處于起步階段,總體水平不高,也缺乏系統性,大部分產品還是屬于照貓畫虎的仿制,設計機理不清晰,性能不能得到發揮,產品適應性差、標準化程度低,機械動力消耗大,機具功能單一,且基本不能適用多種情況地塊,由于不成系列,各產品之間的機械參數五花八門,部件之間的互換更是無從談起,給用戶造成了極大的不便。
目前市場上大部分機具僅僅具有挖掘功能,即使部分產品具有分離、清選和輸送功能,但性能較差,可靠性低,所以挖掘出來的馬鈴薯都需人工撿拾,由于馬鈴薯的收獲期短,因而功能單一的收獲機械的實際利用率較低,加之制造質量較差,使用可靠性不足,使用時故障多,降低了收獲效率,用戶因投資回收期長而積極性不高,限制了其進一步推廣。
四、發展對策及建議
1.強化功能集成,提高機具適應性
我國馬鈴薯種植面積廣,不同地區的土壤差別很大,加之地塊類型復雜,因而應強化適應性,研制開發可適用于多種地塊的馬鈴薯收獲機械,用盡可能少的機型滿足各地區的不同要求。要系統地消化吸收國外先進技術,優化集成挖掘、分離、清選和輸送功能,形成馬鈴薯收獲機系列產品。
2.進一步完善馬鈴薯收獲機械標準
馬鈴薯收獲機械的通用性和互換性差,其根本原因還是我國在馬鈴薯收獲機械方面的設計標準不夠系統、完善,要制定統一的產品標準,提高機具零部件的通用性和互換性的研究和管理,規范生產市場,避免重復研究。
3.加大科研投入力度
馬鈴薯收獲機械復雜,設計、工藝要求難度大,由于起步晚,缺乏系統全面的研究實驗,我國的馬鈴薯收獲機械多數為仿制國外機型,但對原型機的設計機理不清晰,致使在用戶使用過程中出現問題,不能找到有效的根本解決方案,嚴重制約了用戶對該機械的使用積極性。因此,應進一步加大相關科研的投入力度,在保證技術創新資金充裕的同時,強化試驗和推廣環節,采取多種優惠政策,加大設備的購置補貼等,加快機具的推廣使用,保障科研和生產企業的投入回報,不斷改進產品設計和制作水平,不斷提高可靠性和適用性,盡快實現良性循環。
五、結論
我國馬鈴薯種植面積已超過500萬公頃,是世界上最大的馬鈴薯生產國,也是最大的馬鈴薯消費國,在幾大作物生產中,馬鈴薯從種到收,尤其是收獲,勞動強度最大,損失率也最大。在保持種植面積的前提下不斷提高產量,降低勞動強度,提高生產效率,沒有機械化作支撐是辦不到的。因而全面系統地開展研究和探討適合我國的馬鈴薯收獲機械,以加快升級換代的步伐,適應市場需求,具有重要意義。
[1]中國農業機械化科學研究院.農業機械設計手冊(下冊)[M]. 北京:中國農業科學技術出版社,2007.
[2]Cz.卡那沃依斯基. 收獲機械[M].北京:中國農業機械出版社:1983
[3]史明明,魏宏安,胡忠強等.國內外馬鈴薯收獲機械產品現狀調查[J]. 農業機械,2013(7):100-105.
[4]賈晶霞,姜貴川,王楠等. 國內外馬鈴薯收獲機械研究進展[J]. 農業機械,2012(14): 13-14.
[5]初旭宏,黃丙申.馬鈴薯收獲機械存在的主要問題及解決辦法[J].農機使用與維修,2010(1):46-47.
[6]王海軍,曹玉.馬鈴薯收獲機適用性影響因素分析與實證[J]. 農機化研究,2013(12):15-19.[7]魯勁屏. 馬鈴薯收獲機械質量現狀分析[J]. 農機質量與監督,2008(1):28-29.
Study and Development of Potato Harvest Machinery
JIN Ying-hui
(Liaoning Provincial Agricultural Machinery Quality Supervision station, Shenyang, Liaoning 110034, China)
Study on potato harvest machinery is significant for improving service behavior of implementing
potato harvest machinery; study; development
S223.5
A
1008—6129(2015)03—0079—04
(責任編輯 馬 驊)
2015—03—13
金英慧(1967—),遼寧沈陽人,遼寧省農機質量監督管理站,高級工程師。
mechanized harvest of potato. This paper introduces the types and characteristic of potato harvest machinery,summarizes the study actuality and development of potato harvest machinery at home and abroad, analyzes the main problems in the development of potato harvest machinery in China, and points out some development suggestions.
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09