MS-100型多傳感器計程儀設計研究
2015-10-24 05:45:03殷宗亮
船電技術 2015年9期
范 鄒1,殷宗亮2
(1.海軍駐九江地區軍事代表室,江西九江 332007;2.七○七所九江分部,江西九江 332007)
MS-100型多傳感器計程儀設計研究
范鄒1,殷宗亮2
(1.海軍駐九江地區軍事代表室,江西九江 332007;2.七○七所九江分部,江西九江 332007)
本文針對傳統計程儀存在的不足,提出了一種新型多傳感器計程儀設計方法,具有自主精確組合測速的特點。
多傳感器計程儀
0 引言
計程儀作為普航設備,用于測量航速并累計航程。傳統的計程儀主要為電磁式、壓差式或多普勒式的單一傳感器計程儀。單一傳感器方式的計程儀存在測速精度低、工作穩定性差等局限性。MS-100型多傳感器計程儀作為新研制的設備,遵循以下指導思想進行設計創新:
1)分析各種測速傳感器的工作局限性,通過互補測速方式實現全天候穩定持續不斷的組合測速;
2)發展基于北斗導航衛星信號的精確測速技術,實現自主測速。
1 主要技術指標
1.1主要功能
1)具有對地測速功能;
2)具有對水測速能力;
3)具有測流功能;
4)具有對外發送航速、航程、狀態信息功能。
1.2主要性能
1)測速范圍:-40 kn ~40 kn;2)測速誤差:不大于0.2 kn或1%(取大值);3)測流誤差:不大于0.25 kn或1.5%(取大值)。
2 工作原理
2.1方案組成
MS-100型多傳感器計程儀組成見下圖。
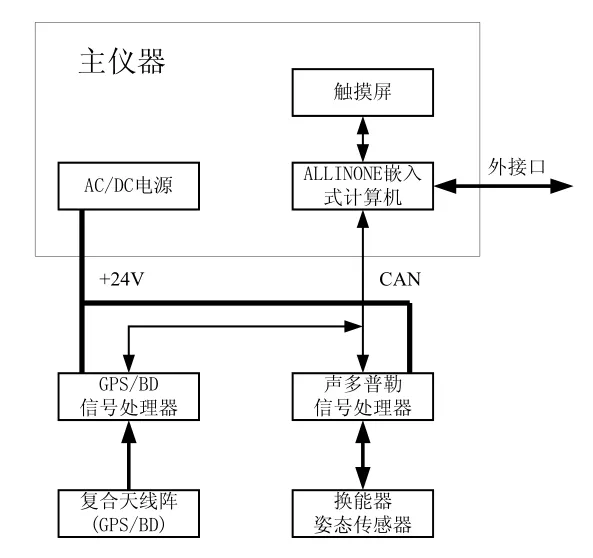
圖1 多傳感器計程儀組成
MS-100型多傳感器計程儀配置了北斗、GPS、聲多普勒換能器共三個測速通道。信號處理器通過處理這三個通道的信息獲得最終的速度信息,并通過對外接口將相關信息發送給不同的用戶。設備的信息流程說明如下:
1)根據天線的公用技術,北斗天線、GPS天線可采用天線共用技術,在必要的情況下,可考慮加入格拉納斯天線。系統配置GPS測速通道的原因是目前我國北斗系統暫時還未做到全球覆蓋,在這些區域可使用GPS信號測速[2]。衛星信號接入相應的接收卡進行處理;
2)多普勒測速通道[1]包括換能器基陣和信號處理器兩部分,多普勒計程儀主要用來測量兩維對地、水航速,對地時工作水深(基陣面起算)小于200 m,對外接口為直流供電和RS422接口;
3)主儀器是MS-100型多傳感器計程儀的核心,采用ALLINONE嵌入式計算機、觸摸屏技術,完成計程儀的操作、顯示、解算、對外信息發送等功能;
4)衛星信號處理器采用OEM模組方式,獲得衛星信號后,主要完成其多普勒頻率解算獲得速度信息,對外接口為直流供電和RS422接口。
2.2使用方式和工作流程
MS-100型多傳感器計程儀主要有如下三種使用方式:
1)在北斗、GPS、多普勒三者之間,按順序優先選擇絕度速度輸出,確保輸出最高質量、持續不間斷的對地航速;
2)多普勒測速通道持續輸出對水速度,當最惡劣情況發生的時候,沒有絕對速度源,則使用多普勒對水速度替代絕對速度對外輸出;
3)在絕對速度和相對速度同時有效的情況下,對兩者同步求取矢量差,獲得實時洋流速度,并對外輸出。
2.3設備布局
MS-100型多傳感器計程儀由信號處理器、天線、換能器基陣等主要的3個部分組成,其中的換能器基陣布置時,要求距船艏1/3船長處,是全船流場最為穩定的地方,因此測速傳感器主要集中布置在此,實際確定具體位置時,應避開排、取水口,并且其周圍船底上沒有任何凹凸物。
信號處理器則布置在任意導航艙室或部位即可,其距換能器基陣的距離沒有明顯的限制,但距離天線的位置有一定要求,必要時可以考慮中繼器之類的技術措施。
3 關鍵技術及解決措施
MS-100型多傳感器聲計程儀多普勒部件,直接選用市面上已有的聲多普勒計程儀,技術成熟,僅需直接繼承使用,沒有技術難度。需重點解決的關鍵技術與措施在于衛星測速技術的選取和利用。
常見的衛星測速技術主要包括卡爾曼濾波,位置求導和直接觀測多普勒數值等三種方法。其中卡爾曼濾波方法的測速精度較高,但理論上較為復雜。位置求導法的數學概念明晰,但精度的提高嚴重依賴于定位精度,尤其是動態定位時的多余觀測值較少,難以保證高精度測速。多普勒技術的測速精度對位置精度依賴性不強,利用接收機觀測到的相位變化率,采用雙差技術確定速度,易于實現高精度,避開了整周期測速模糊度問題。
MS-100型多傳感器計程儀的衛星測速部件中,采用衛星信號的直接觀測多普勒數值技術測速,但同時也對其余兩種方法測速結果予以解算,確保信息冗余。
眾所周知,利用的衛星越多,測量的結果越精確。因此,組合GPS和北斗雙星座,是提高系統測速精度、提高測速可用性的關鍵技術。要解決雙星座利用問題,解決兩個系統的坐標變換、時鐘轉換及時鐘誤差問題是突破雙星座利用技術的關鍵途徑[3]。
4 結語
本文針對傳統計程儀的不足,分析了MS-100型多傳感器計程儀的方案組成、工作原理、使用方式和工作流程等。介紹了利用新興技術,發展基于北斗導航衛星信號的自主精確組合測速技術的新型計程儀,探討了未來計程儀技術發展方向與趨勢。
[1] 陳傳欣.船用多普勒計程儀測速精度分析.航海技術,2004,(2).
[2] 高音,陳鐸. GPS與船用計程儀及陀螺羅經的關系.大連水產學院學報,1998,(4).
[3] 李峻年,孟士超. 船用衛星導航設備對復合式計程儀校正的探討. 現代導航,2011,(3).
Research on Design of MS-100 Multi-sensor Vialog
Fan Zou1,Yin Zongliang2
(1.Naval Representatives Office in Jiujiang,Jiujiang 332007,Jiangxi,China;2.Jiujiang branch of 707th institute,Jiujiang 332007,Jiangxi,China)
Aimed at shortcoming of conditional vialog ,the paper presents a new designing method for a multi-sensor vialog with accurate and independent features.
multi-sensor; vialog
U666
A
1003-4862(2015)09-0060-02
2015-07-09
范鄒(1979-);男,工程師。研究方向:航海儀器。