純電動汽車動力性與能量消耗參數靈敏度分析
2015-10-25 02:27:35張宸維林方圓
汽車零部件 2015年9期
關鍵詞:汽車
張宸維,林方圓
(安徽江淮汽車股份有限公司技術中心,安徽合肥230601)
純電動汽車動力性與能量消耗參數靈敏度分析
張宸維,林方圓
(安徽江淮汽車股份有限公司技術中心,安徽合肥230601)
建立了純電動汽車動力性和能量消耗的計算數學模型。運用AVL-CRUSIE軟件,建立某電動汽車仿真模型,并對該車型的動力性和能量消耗進行了參數靈敏度仿真分析,得出各參數變化對動力性和能量消耗的靈敏程度。分析結果表明:傳動系效率和整車質量對動力性和能量消耗的影響均較大。研究結果為電動汽車動力系統的參數設計與優化提供了依據。
純電動汽車;動力性;能量消耗;參數靈敏度;仿真分析
0 引言
純電動汽車零排放、無污染,是我國汽車工業的發展方向。純電動汽車行駛時要求盡可能降低汽車的各種能耗,充分利用攜帶的有限電能,最大限度地增加續駛里程,提高能耗經濟性[1]。
純電動汽車動力性的評價指標主要有最高車速、加速時間和最大爬坡度。能量消耗的評價指標包括續駛里程、單位里程容量消耗、單位里程能量消耗、單位容量消耗行駛里程和單位能量消耗行駛里程等[2]。
參數靈敏度即各參數對純電動汽車的影響程度[3],用參數靈敏度分析對純電動汽車的關鍵設計參數進行選擇,可以明確各參數對整車動力性和能量消耗的影響[4]。文中主要對純電動汽車動力性和能量消耗的參數靈敏度進行研究。
1 純電動汽車動力性計算模型
動力性是由汽車縱向受力所決定的,確定汽車行駛時驅動力-行駛阻力平衡方程,就可以利用受力關系確定汽車的最高車速、加速時間和最大爬坡度。
汽車在水平路面上行駛的總阻力為[5]:
式中:Ff、Fi、Fw、Fj分別為汽車行駛時的滾動阻力、坡度阻力、空氣阻力、加速阻力;f為滾動阻力系數;m為汽車質量;α為坡度角;CD為空氣阻力系數;A為迎風面積;u為汽車行駛速度;g為重力加速度;δ為汽車旋轉質量換算系數;du/dt為汽車行駛加速度。
1.1最高車速計算模型
驅動電機牽引力計算見公式(2):
式中:T為驅動電機轉矩,N·m;i0為傳動比;ηT為傳動系機械效率;r為驅動輪半徑,m。
根據車速與電機轉速關系計算傳動系傳動比,見公式(3):
式中:umax為最高車速,km/h;nmax為電機最高轉速,r/min;i1為傳動比最小要求。
根據汽車行駛方程,汽車在水平良好路面上行駛,行駛阻力Ff+Fw與驅動力Ft相平衡時達到的穩定車速即為最高車速。
1.2加速時間計算模型
由汽車行駛方程式(1)可得,車輛從靜止起步全力加速至車速u的加速度為:
根據公式(6)可得加速度倒數曲線,采用分段積分的方法,可得到各個速度區間的加速時間,累加后即為加速時間t:
1.3最大爬坡度計算模型
汽車爬坡能力指汽車在良好路面上克服Ff+Fw后的余力全部用來克服坡度阻力時能爬上的坡度,所以du/dt=0。
以最大爬坡度確定其短時工作線低速轉矩:假定以勻速爬坡,車輛所受阻力項中沒有加速阻力,則所需電機驅動力為:
2 純電動汽車能量消耗計算模型
主要針對純電動汽車能量消耗進行參數靈敏度分析。汽車功率平衡方程式(11):
式中:Pe為汽車行駛功率,kW;
i為道路坡度值。
若不考慮純電動汽車在行駛中電器附件的能量消耗,純電動汽車單位里程能耗可由式(12)表示:
式中:E為單位里程能耗;t為工況行駛時間,s為工況行駛的距離。
2.1純電動汽車能量消耗計算模型
能量消耗是動力電池端輸出功率積分的過程。為驅動車輛,動力電池輸出功率應等于阻尼功率、傳動裝置中的功率損耗、電動機驅動功率以及在電子儀器設備中所含的功率損耗。傳動裝置和電動機驅動中的功率損耗分別通過各自的系數ηt和ηm予以描述,于是,在沒有附加載荷的情況下,動力電池的輸出功率可表達[6]為:
等速行駛s行程時,其單位里程能量消耗如式(14)所示:
式中:t為車輛行駛運行時間。
3 仿真模型的建立
AVL-CRUISE軟件是研究汽車動力性、能量消耗的高級模擬分析軟件。文中將應用CRUISE軟件對純電動汽車進行動力性和能量消耗參數靈敏度分析。車輛的基本參數見表1。
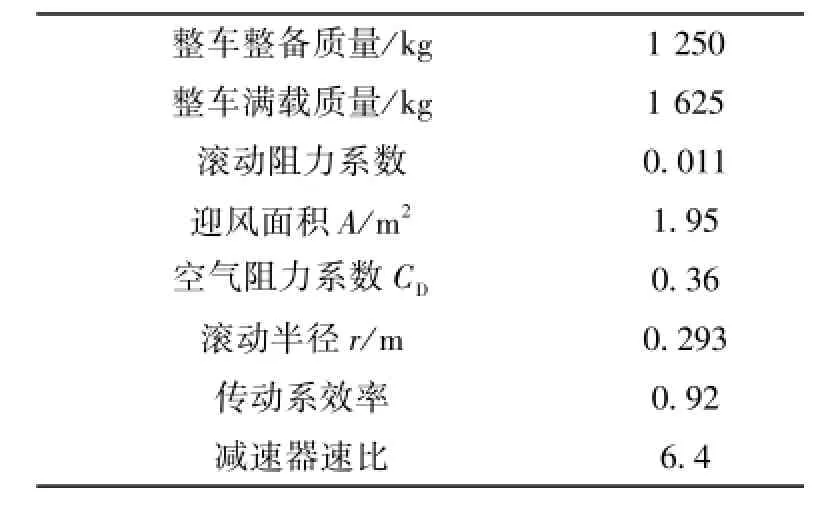
表1 車輛基本參數
基于CRUISE仿真軟件,建立整車仿真模型,選擇設定的計算任務(最高車速、加速時間、最大爬坡度和能量消耗)和工況,設置合適的仿真步長和精度,通過改變模型中的相關參數,研究不同參數變化對動力性和能量消耗的靈敏度。整車仿真模型如圖1所示。
4 整車動力性參數靈敏度分析
汽車動力性參數靈敏度是指某參數的變化對動力性的影響程度,即單位參數變化率引起的汽車性能指標的變化率。參數靈敏度是一個量綱為一的量。汽車的動力性除了與驅動電機類型、動力系統的合理匹配程度等因素有關外,還受到汽車整車質量、傳動系機械效率、滾動阻力系數和空氣阻力因素等參數的影響[7]。
整車動力性參數靈敏度有4個參數,分別為汽車整車質量、傳動系機械效率、滾動阻力系數和空氣阻力因素,文中對影響整車動力性的參數分別作±5%變化,各參數變化均是在表1中的初始值基礎上進行的。
由表2—4可知:該純電動汽車的加速時間和最大爬坡度參數靈敏度順序為:傳動效率、試驗質量、滾動阻力系數、空氣阻力系數,其中傳動效率和試驗質量的影響尤為顯著;最高車速參數靈敏度順序為:空氣阻力系數、傳動效率、試驗質量、滾動阻力系數,其中空氣阻力系數的影響尤為顯著。
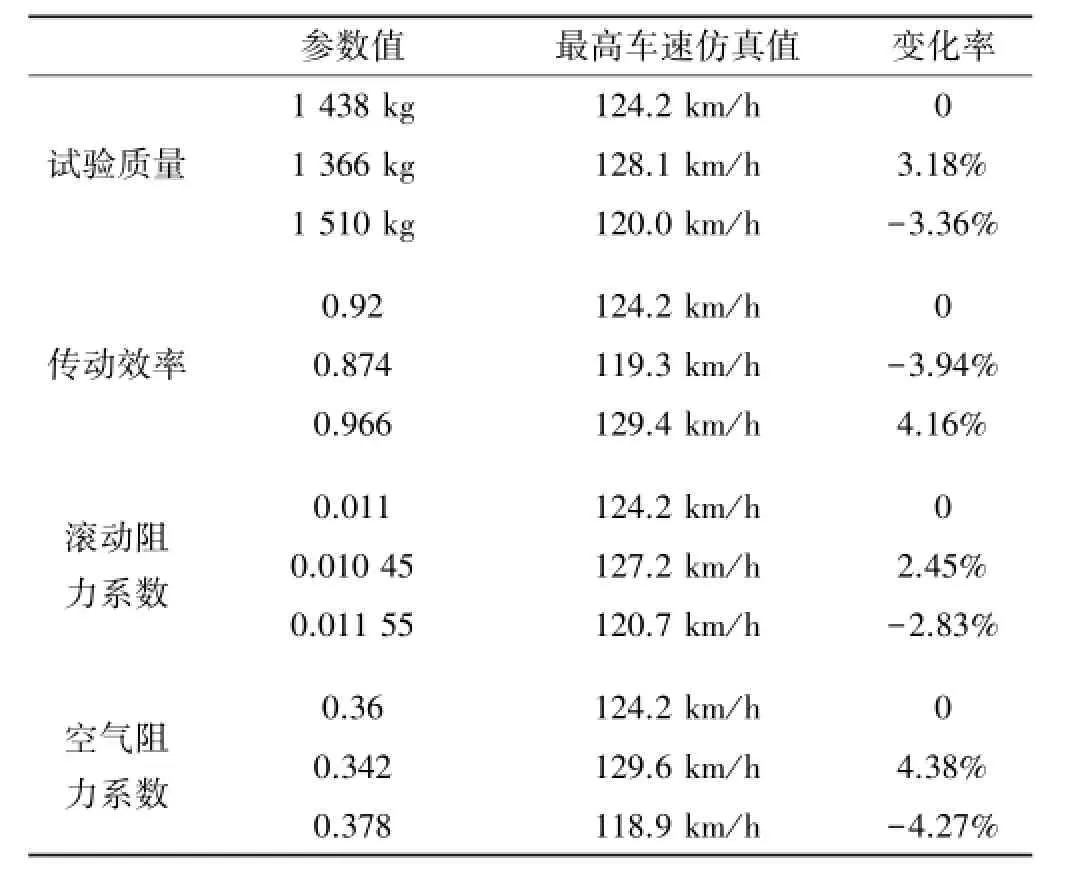
表2 最高車速參數靈敏度分析
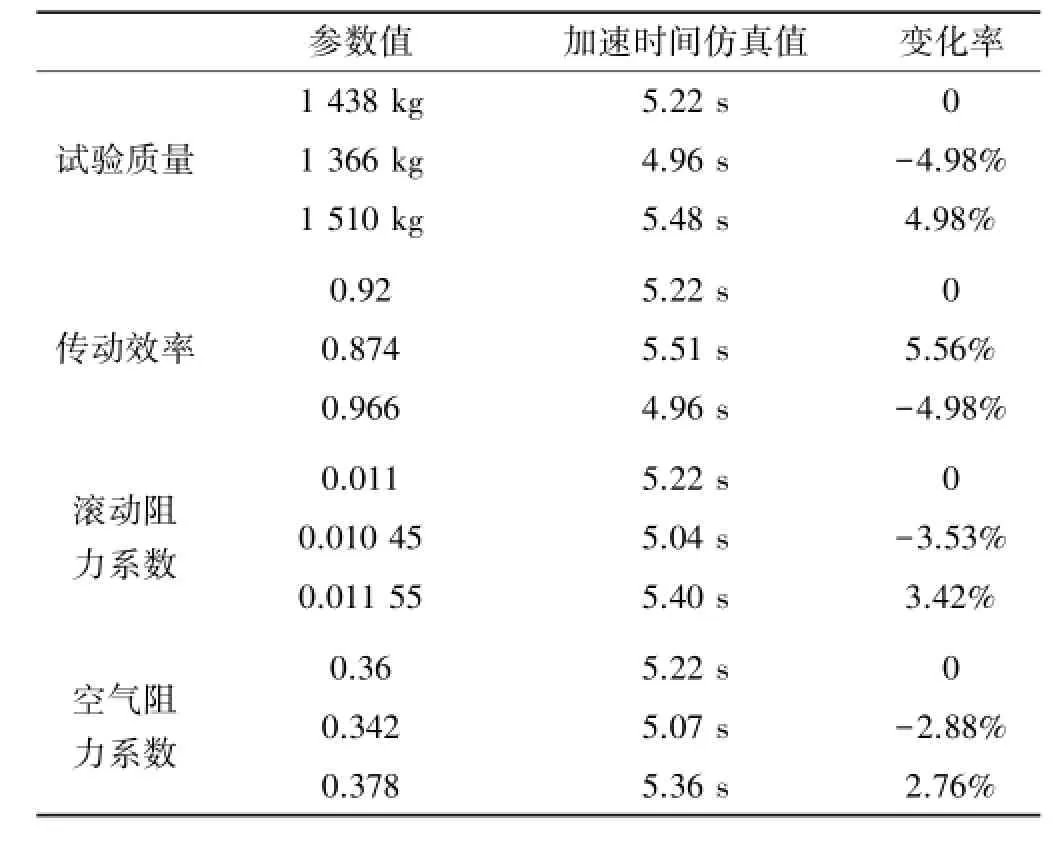
表3 0~50 km/h加速時間參數靈敏度分析
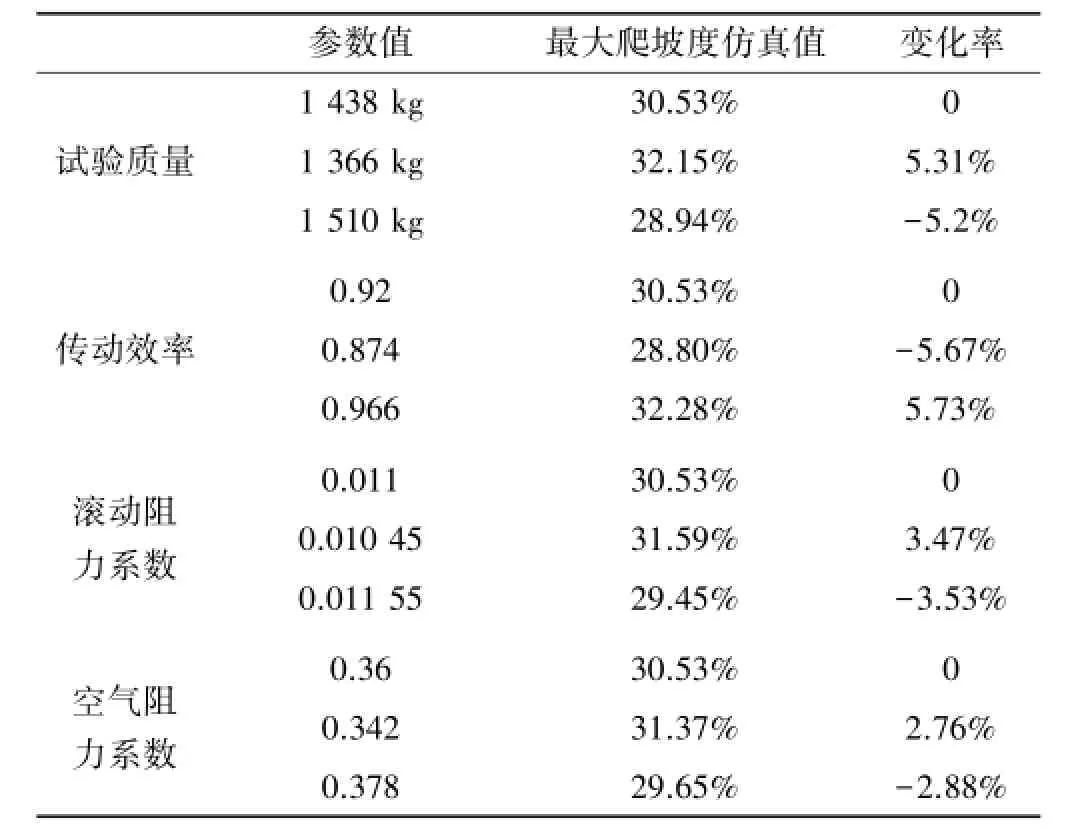
表4 最大爬坡度參數靈敏度分析
5 整車能量消耗變化分析
純電動汽車能量消耗的參數靈敏度是指純電動汽車的參數變化對其能量消耗的影響。
純電動汽車每百公里能耗對電動汽車的能量消耗評價十分重要,而電動汽車各參數對每百公里能耗的影響也不一樣。文中對影響整車能量消耗的參數分別作±5%變化,各參數變化均是在表1中的初始值基礎上進行的。
選擇 NEDC(新歐洲循環工況,New European Driving Cycle)工況為道路循環行駛工況在CRUISE仿真環境里進行仿真。NEDC由4個ECE工況與1個EUDC工況疊加而成。文獻[8]中給出一個示例:該工況下總行駛里程10.93 km,歷時1 225 s,最高車速120 km/h,平均車速32.1 km/h,最大加速度1.06 m/s2,最大減速度-1.39 m/s2,行駛期間共停車13次,怠速時間為339 s。
由表5可知,該純電動汽車的能耗參數靈敏度順序為:傳動效率、試驗質量、滾動阻力系數、空氣阻力系數,其中傳動效率對每百公里能耗的影響尤為顯著。

表5 NEDC工況能量消耗參數靈敏度分析
6 結束語
(1)通過建立純電動汽車動力性和能量消耗數學模型,得出了純電動汽車動力性和能量消耗參數靈敏度計算模型。
(2)研究了影響純電動汽車動力性和能量消耗的諸多參數及相關參數的靈敏度,通過動力性和能量消耗參數靈敏度分析,可以針對性地改進某些參數,以達到優化動力性和能量消耗的目的,為純電動汽車動力系統的參數設計與優化提供了依據。
【1】李國安,初亮,魯和安.電動汽車續駛里程的影響因素[J].吉林工業大學學報,2000,30(3):20-23.
【2】王震坡,甄子健.純電動汽車能耗能量消耗評價方法研究[J].高技術通訊,2007,17(2):171-174.
【3】余志生.汽車理論[M].3版.北京:機械工業出版社,2000:1-29.
【4】Yang Y P,Chuang D S.Optimal Design and Control of a Wheel Motor for Electric Passenger Cars[J].IEEE Transactions on Magnetics,2007,43(1):51-61.
【5】陳明,郭立新.電動汽車動力性與能耗經濟性參數靈敏度分析[J].東北大學學報:自然科學版,2012(5):723-726.
【6】Ehsani Mehrdad,Gao Yimin,Emadi Ali.現代電動汽車、混合動力電動汽車和燃料電池車:基本原理、理論和設計[M].2版.北京:機械工業出版社,2010:89-104.
【7】劉忠途,伍慶龍,宗志堅.純電動汽車動力性與能耗靈敏度分析[J].上海汽車,2010(12):8-11.
【8】王保華,羅永革.基于CRUISE的汽車建模與仿真[J].湖北汽車工業學院學報,2005,19(2):5-8.
Parameter Sensitivity Analysis for the Dynamic Performance and the Energy Consumption of the Electric Vehicle
ZHANG Chenwei,LIN Fangyuan
(Technology Center,Anhui Jianghuai Automobile Co.,Ltd.,Hefei Anhui 230601,China)
The calculation mathematical models of the dynamic performance and the energy consumption of electric vehicle were established.The simulation model of a electric vehicle was established based on AVL-CRUSIE software.The parameter sensitivity analyses for the dynamic performance and the energy consumption were also conducted on the electric vehicle.The sensitivity of parameters change on the dynamic performance and the energy consumption was gained.The results show that the transmission efficiency and total mass have a greater influence on the dynamic performance and the energy consumption.The conclusions provide a basis for the parameter design and optimization of the dynamic system of electric vehicle.
Electric vehicle;Dynamic performance;Energy consumption;Parameter sensitivity;Simulation
2015-04-21
張宸維(1985—),男,碩士,研究方向為電動汽車動力匹配與仿真分析。E-mail:zhangchenwei2010@163.com。
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
