基于切換預測理論的電動汽車驅動控制策略研究
2015-10-29 02:22:10張用郭英雷陳磊郭建豪郭小溪
山東電力技術 2015年12期
張用,郭英雷,陳磊,郭建豪,郭小溪
(1.國網山東省電力公司電力科學研究院,濟南250003;2.國網山東省電力公司青島供電公司,山東青島266001)
·試驗研究·
基于切換預測理論的電動汽車驅動控制策略研究
張用1,郭英雷2,陳磊2,郭建豪2,郭小溪1
(1.國網山東省電力公司電力科學研究院,濟南250003;2.國網山東省電力公司青島供電公司,山東青島266001)
電動汽車要求驅動電機具有快速轉矩響應以保證整個系統的高動態性能,電流預測控制具有理論嚴密、實現簡單、快速響應的特點,滿足電動汽車對扭矩快速響應的要求。基于切換理論建立了永磁同步電機側及逆變器的切換動態模型,在此基礎上提出了基于預測控制的電流跟蹤控制策略,通過切換模型對不同開關模式下一周期的電流進行預測以此選擇最優的開關狀態。最后在Matlab/Simulink中搭建了仿真模型,仿真結果表明了所建模型和控制策略的正確性。
電動汽車;永磁同步電機;預測控制;切換系統;電流控制
0 引言
近年來,隨著能源危機和環境污染日趨嚴重,電動汽車作為一種節能環保的交通工具受到越來越多的關注[1]。驅動電機及其電驅動控制系統是電動汽車的關鍵零部件,電機的性能及其驅動的控制算法和策略對整車的性能產生直接的影響[2]。永磁同步電動機(permanent magnet synchronous motor,PMSM)具有體積小、效率高、功率密度大、轉子結構簡單、穩定性好等優點,在高性能、轉矩響應快速性的場合具有很好的應用前景,在電動汽車中采用永磁同步電動機驅動逐漸成為發展趨勢[3-5]。
電動汽車要求電機驅動系統具有轉矩控制精確、高動態性能、需要克服車載惡劣環境等特性,因此高性能永磁同步電機伺服控制系統要求有準確、快速響應的電流內環。常用的永磁同步電機電流環的控制方法主要有PI控制、滯環控制、預測控制等[6]。PI調節器結構簡單、穩定可靠,目前在伺服系統中應用最為廣泛。但是PI控制原理上是一種線性控制理論,存在調節時間長、參數選擇復雜且容易出現超調等問題,實際應用中很難兼顧響應的快速性和穩定性,難以滿足電動汽車高效穩定快速的動態性能。滯環控制也稱之為Bang-Bang控制,因其可以直接對電流進行跟蹤控制,其快速性好。但滯環控制存在紋波大、控制精度較低等缺陷,難以滿足電動汽車驅動系統要求。
模型預測算法是一類新型的優化控制算法,其中模型預測電流控制算法通過基于電機的模型選取控制變量并構造目標函數,計算選取使目標函數最小的矢量得到輸出的控制矢量,因其具有高動態響應性能和低電流諧波分量的特點成為永磁電機驅動控制的研究熱點[7]。文獻[8]提出一種基于離散模型永磁同步電機電流預測控制算法,有效提高了系統電流環的動態性能和穩態精度。文獻[9]提出了一種改進的永磁同步電機電流預測控制方法,通過引入積分控制和改進占空比更新策略有效減低了系統對參數的敏感性。切換預測控制是近年來興起的新型預測控制方法,采用大信號直接建模方法,能在大擾動下保持穩定[10]。基于切換理論建立永磁同步電機切換預測模型及優化控制策略。相比于傳統的預測控制算法,切換理論能夠對系統進行大信號直接建模,其抗大范圍擾動能力更強[10-11],因此控制器設計更加簡潔且能夠保證在全工況下的高動態響應速度。在Matlab/Simulink環境下搭建了仿真模型,仿真結果表明采用的建模方法和控制策略正確有效。
1 永磁同步電機預測模型
永磁同步發電機在dq坐標系下令d軸與轉子永磁體的磁鏈方向重合,定子電壓電流正方向遵循電動機慣例,其電壓、磁鏈方程如下:
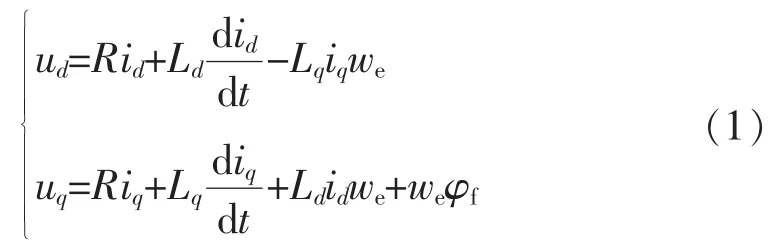
式中:R和Ld,Lq分別為發電機的定子電阻和定子直軸電感、交軸電感;ud,uq,id,iq為定子電壓和電流的d、q軸分量;φf為永磁體磁鏈;ωe為發電機電角速度。
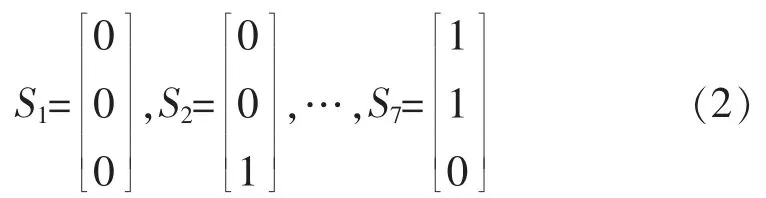
對永磁同步電機PWM逆變器建模,若令kp(p= a,b,c)表征開關器件狀態,定義kp=1表示第p對開關上橋壁開通,下橋壁關斷,k=0表示下橋壁開通,上橋壁關斷。正常工作過程中,ka、kb、kc共對應8種開關組合,即:000、001、010、011、100、101、110和111,其中000和111組合作用相同,因此有7種有效狀態。若σ∈{1,2,…,7}表示7種有效模態,定義系統開關函數S=(ka,kb,kc)T,7種模態下Sσ取值分別為:
永磁同步電機工作過程中PWM逆變器動態特性隨著開關函數的不同而變化,其d、q軸電壓與在不同開關狀態的關系為:

式中:Udc為直流母線電壓,θ為永磁同步電機轉子角度,且有

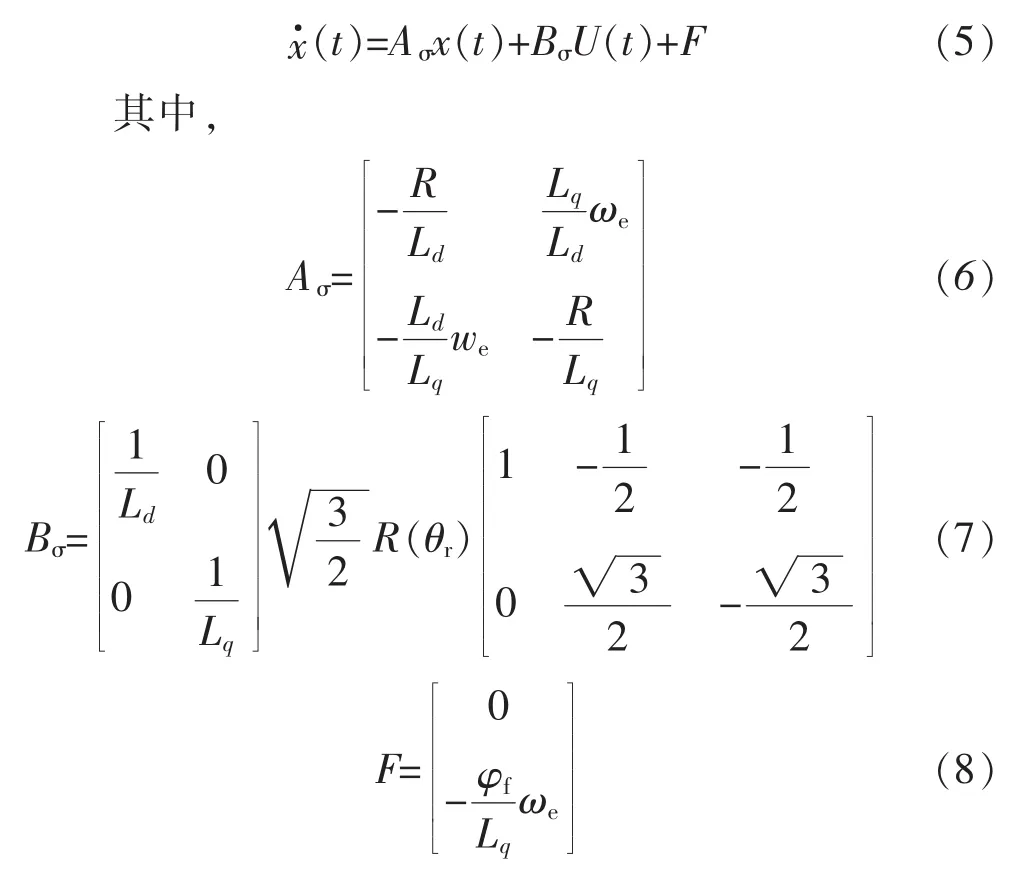
引入狀態變量x=(id,iq)T,對表面貼式結構有Ld= Lq=L,將式(3)帶入式(1)可以得到狀態空間形式的永磁同步電機切換預測模型:
2 電流預測控制算法
由永磁同步電機電流預測模型可知,通過控制開關狀態,可以得到不同的狀態方程,從而控制電機運行狀態。如何根據給定和當前狀態,選擇出最優的開關狀態,在保證系統全局穩定的前提下,系統狀態變量能夠盡快跟蹤給定,是電流預測控制的目的。
通過切換預測模型可以得到不同切換狀態下永磁同步電機工作過程中下一個時刻的電流值,假設功率變換器控制周期為ΔT,當前狀態下功率變換器狀態為x(t),經過一個周期的控制后,功率變換器狀態變為x(t+1)。如果控制速度足夠快,θr和ωe可以認為在ΔT時間內是不變的[44]。此時,

由式(9)可以計算出7種不同的開關狀態控制矢量作用一個周期后,永磁同步電機電流狀態。
選擇給定和參考電流值之間的誤差,以該誤差最小為成本評價函數,可以構建切換模型的最優切換函數

根據成本評價函數,確定最小成本函數所對應的控制矢量,并確定該周期內功率變換器開關管對應的開關變量。基于切換預測控制結構如圖1所示,永磁同步電機的預期轉速作為外環給定,PI調節器比例常數Kp=0.7,積分常數KI=0.1,可以實現較快的速度響應。速度環的PI調節結果作為q軸的給定電流。為實現磁場定向,d軸給定電流設為0。電流內環采用切換預測模型的電流控制策略,從永磁同步電機采集三相電流經過坐標變換后送入預測控制器,預測控制器計算不同開關狀態下一個周期的電流值,與給定的電流值比較后選擇確定最優的開關狀態給逆變器。

圖1 切換預測控制結構
3 仿真分析
為了驗證本文控制策略的正確性和有效性,在Matlab/Simulink中建立了1臺50 kW的永磁同步電機模型,系統仿真參數設置如表1所示。
仿真時間為1 s,圖2是給定轉速3000 r/min時電機轉速響應曲線,由圖可知,電機啟動后很快穩定到給定轉速,且超調很小。圖3是對應的開關狀態選擇結果。由圖可知,隨著仿真進行,系統7個開關狀態將來回切換,切換預測模型能夠直接計算得到逆變器需要的開關矢量,省去了調制過程,因此其計算和實現非常簡單。
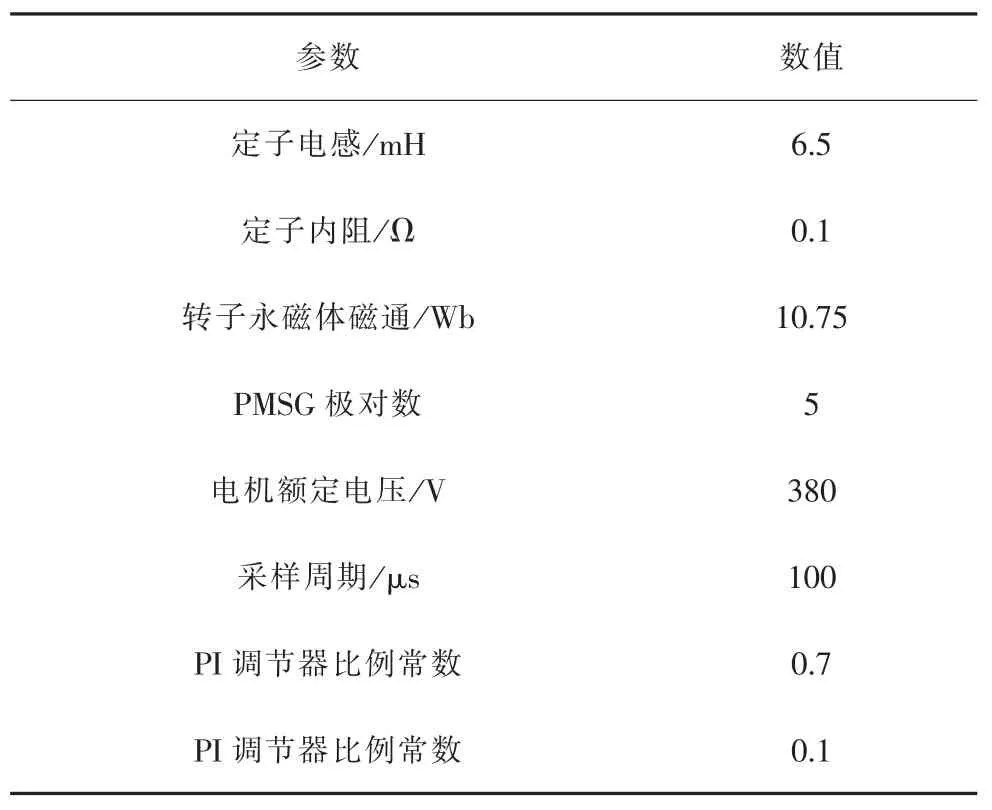
表1 系統仿真參數

圖2 速度控制跟蹤效果
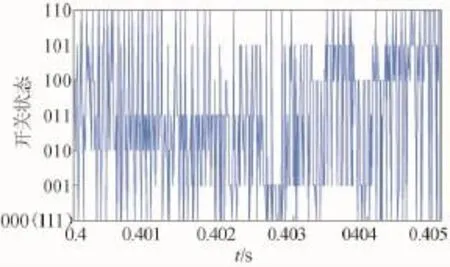
圖3 開關狀態變化
在仿真過程中,0.5 s時刻令負載轉矩從5 Nm變為-5 Nm,測試永磁同步電機運行特性。圖4和圖5分別為電機負載突變的過程實測轉矩和永磁同步電機三相電流圖形。從圖中可以清晰看到負載突變時電機電流的變化,電流的調節可以在一個周期內完成,動態響應速度非常快,體現了切換預測控制的優勢。
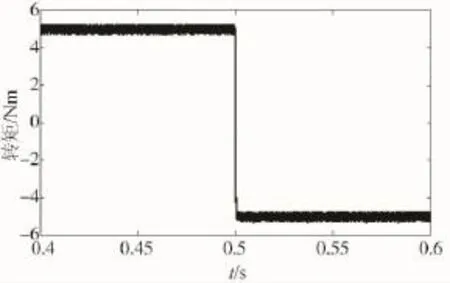
圖4 轉矩跟蹤效果
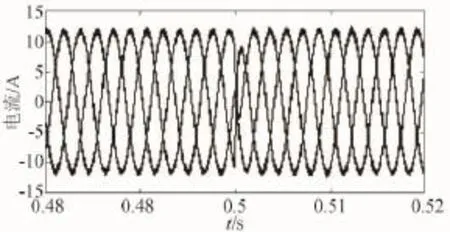
圖5 電流變化
圖6是永磁同步電機d軸和q軸電流,在0.5 s時隨著轉矩給定的突變,永磁電機q軸電流也隨之改變,保證了系統快速跟蹤給定。整個仿真過程中,電機的d軸電流都保持為0,顯示了切換預測電流控制策略良好的無功抑制能力。
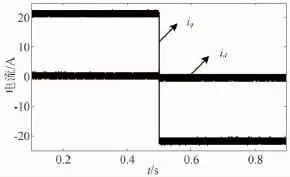
圖6 dq軸電流軌跡
4 結語
基于切換理論建立了直驅永磁同步發電切換動態模型,并根據切換模型,設計了預測控制電流跟蹤算法。在Simulink環境下搭建仿真模型,對系統模型及電流跟蹤控制算法進行了驗證。仿真結果表明,所提出的控制策略能夠保證系統穩定工作,同時當負載給定發生階躍變換等大范圍擾動時,永磁同步電機能夠迅速跟蹤給定變化,具有良好的動靜態控制性能。
[1]楊方,張義斌,葛旭波,等.中美日電動汽車發展趨勢及特點分析[J].能源技術經濟,2011,23(7):41-44.
[2]王文偉,畢榮華.電動汽車技術基礎[M].北京:機械工業出版社,2010.
[3]歐陽明高,李建秋,楊福源,等.電動汽車電機驅動系統動力特性分析[J].中國電機工程學報,2006,26(6):136-140.
[4]Vaez-Zadeh S,Ghasemi A R.Design Optimization of Permanent Magnet Synchronous Motors for High Torque Capability and Low Magnet Volume[J].Electric Power Systems Research,2010,74:307-313.
[5]ZHANG Y,ZHU J,XU W.Predictive torque control of permanent magnet synchronous motor drive with reduced switching frequency[C]∥Electrical Machines and Systems(ICEMS),2010 International Conference on IEEE,2010:798-803.
[6]ZHANG Y,WEI X.Torque ripple RMS minimization in model predictive torque control of PMSM drives[C]∥Electrical Machines and Systems(ICEMS),2013 International Conference on IEEE,2013:2 183-2 188.
[7]Morel F,Lin-Shi X,Retif J M,et al.A comparative study of predictive current control schemes for a permanent-magnet synchronous machine drive[J].IEEE Transactions on Industrial Electronics,2009,56(7):2 715-2 728.
[8]Vargas R,Rodriguez J,Ammann U,et al.Predictive current control of an induction machine fed by a matrix converter with reactive power control[J].Industrial Electronics,IEEE Transactions on,2008,55(12):4 362-4 371.
[9]牛里,楊明,劉可述.永磁同步電機電流預測控制算法[J].中國電機工程學報,2012,32(6):131-137.
[10]王偉華,尚曦,丁有爽.永磁同步電機改進電流預測控制[J].電工技術學報,2013(3):50-55.
[11]李繼方,韓金剛,湯天浩.基于切換系統的開關變換器統一建模[J].華南理工大學學報(自然科學版),2011,39(10):157-163.
[12]馬皓,祁峰,張霓.基于混雜系統的DC-DC變換器建模與控制[J].中國電機工程學報,2007,27(36):92-96.
Control Strategy for EV Generators Based on Switch Predictive Control Method
ZHANG Yong1,GUO Yinglei2,CHEN Lei2,GUO Jianhao2,GUO Xiaoxi1
(1.State Grid Shandong Electric Power Research Institute,Jinan 250003,China;2.State Grid Qingdao Power Supply Company,Qingdao 266001,China)
Electric vehicles(EV)need a fast torque response to guarantee the high dynamic performance of the overall system,and the predictive current control is suitable for the fast response of EV with characteristics of strict theory,simple implementation and fast response.Based on the switching theory,a dynamic model of the permanent magnet synchronous motor and inverter is established.A current tracking control strategy is proposed based on the predictive control and the optimal switching state can be selected by using the model to predict the current of a period of different switching mode.Simulation results show that the proposed model and the control strategy are correct and effective.
electric vehicles(EV);permanent magnet synchronous motor(PMSM);predictive control;;switched model;current control
TM314
A
1007-9904(2015)12-0001-04
2015-10-27
張用(1983),男,工程師,從事新能源及電力電子方面的研究工作。
國家自然科學基金項目資助(61503216)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
光學精密工程(2016年6期)2016-11-07 09:07:19
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
核科學與工程(2015年4期)2015-09-26 11:59:03