
雨水井清掏機械手遙控器的研制
2015-11-04 12:07:38趙廣義王華東唐義鋒
山東工業技術 2015年21期
趙廣義+王華東+唐義鋒

摘 要:本文首先分析了雨水井清掏機械手結構與控制方案求,進而確定系統的主要動作,確定采用無線透傳方式進行設備的控制,選擇STC89C52單片機作為控制核心,對手持器進行研制,分析遙控器的有關功能后,設計出按鍵、顯示、存儲等硬件電路;給出了主程序流程圖;分析了系統的軟調試過程,系統經測試,達到了設計要求。
關鍵詞:雨水井清掏機;STC89C52;遙控器
DOI:10.16640/j.cnki.37-1222/t.2015.21.101
1 引言
國內雨水井的疏通一直沿用人工清掏的方式,一般應用大鐵勺、鐵鏟等手工工具,也有采用一些較先進的手工清掏工具,如污泥鏟、污泥鉗等,但人工清掏工作效率低、勞動強度大。本文在清掏機械手機械設計及主控制器的基礎上,進一步研究一種遙控裝置,解決雨水井場地狹小,人員操作效率低和質量差等問題,提高使用的方便性。
2 機械手整體結構與控制方案
本文設計的清掏機機械結構采用鉸鏈式方案,通過液壓缸控制桿式鉸鏈結構動作,以提高工作效率,它將清掏機安裝于可轉動的底座上,其轉動的控制可以通過手動進行,也可使用液壓缸對底座進行控制;由升降缸、伸縮缸組合控制抓斗的位置,抓斗升降缸控制抓取裝置延井口上下移動,夾緊放松缸控制抓取機構動作,以實現清掏作業。因此,該設備至少需要使用5個電磁液壓閥才可完成對各動作進行液動控制。控制方案中,定位、轉動等采用手動助力控制,抓斗升降與抓取動作可采用手動和自動兩種控制模式。
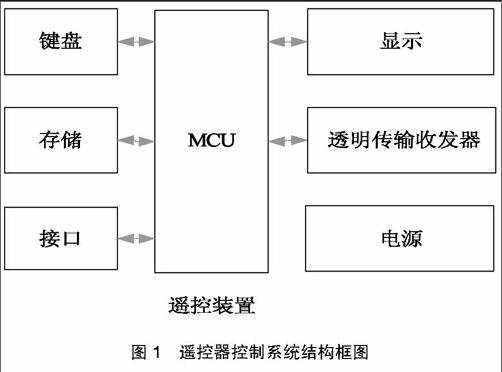
操作人員采用無線遙控方式,通過手持遙控器對機械手的動作進行控制,其中,抓取機構的上下運動和抓取動作需要配有點動或自動運行模式,其他為點動控制。遙控器上電后與主控部分進行通信對接,如果對接成功則相應的指示燈亮,遙控器的數碼管上顯示初始值,此時,可對設備進行相應的控制,也可對設備的相關參數進行設置。遙控器控制系統結構框圖如圖1所示:
3 控制器無線通信方式與協議
手持器采用帶有休眠功能的JZ891微功率無線數傳模塊進行手持機與主機之間的數據傳輸,這樣可有效延長工作時間;主控機采用不帶休眠功能的數傳模塊。
JZ881數傳模塊是高集成度的微功率半雙工的無線數傳模塊,其采用高性能射頻芯片及高速單片機,模塊提供8個頻道,工作頻率470-510MHz、傳輸距離1500米(1200bps)、GFSK 的調制方式、透明傳輸方式、內置看門狗,以保長期可靠運行、UART/TTL、RS232、RS485接口、方便、靈活的軟件編程、超大的512bytes數據緩沖區、適合內置式的安裝。本設計采用休眠模式的3V供電模塊,電壓為直流2.7-3.3V,通上電源,模塊處于休眠狀態,必須由用戶控制模塊的喚醒腳,模塊才可進行收發數據。在軟件設計時還增加校驗校驗檢錯模式,以便對錯誤資料重發,提高數據傳輸的安全性與可靠性。協議為兩字節數據。
4 控制系統的硬件設計
4.1 CPU及存儲器的確定
采用了STC公司生產的型號STC89LE54RD的單片機為搖控制設備的控制核心,工作電壓3V。沿用了經典的MCS-51內核,較于傳統的51單片機綜合性能高,12時鐘/機器周期和6時鐘/機器周期可以任意選擇。本系統選用11.0592MHz的晶體振蕩器、12分頻時,機器周期為1us。由于STC89C52芯片內部無能夠在關電后繼續存儲數據的存儲器,本文選用了能夠在1.8V~6V范圍進行擦寫的存儲器24C02作為設置與運行過程數據的存儲。
4.2 數傳模塊引腳定義及硬件聯接
JZ881 模塊有J1 接口座,共有6 個引腳,與單片機聯接關系定義如表1:
4.3 顯示電路設計
選用了4位共陽LED數碼管作為顯示設備,采用動態顯示方式驅動LED數碼管。數碼管的A-G引腳經過限流電阻與P0端口相連接。P0端口的功能是輸出顯示數據。P1端口的任務是選擇數碼管,具體由P1.0、P1.1、P1.2和P1.3控制。由于位控制的電流消耗較大,每位需選用一個PNP三極管驅動連接在數碼管的兩個公共端。當某位引腳為低電位,相對應的數碼管會顯示出端口的數據。
4.4 按鍵電路設計
遙控器按鍵需要有下降,上升,夾緊,放松,臂升,臂降六個操鍵,保存,+1,-1三個設置鍵和取消,設置,單周,自動四個功能鍵;本設計中,采用復用鍵模式,將電路設計為六個控制鍵和三個功能鍵共九個鍵,使用P3.2、P3.3、P3.4與P3.5、P3.6、P3.7組成矩陣鍵盤電路,用以檢測,自帶上拉電阻。
5 手持器的軟件設計
5.1 手持器工作要求
打開電源開關,如控制板上電,測可實現與手持板握手,正常發送燈亮,否則錯誤發送燈亮;復位按鍵使程序初始化,并發出停止命令;上電后默認在控制狀態,即下降,上升,夾緊,放松,臂升,臂降均處于手動點動控制狀態,即按對應按鍵,控制板上的對應繼電器動作;如在控制狀態下按單周自動,則設備動作順序為:下降-放松-下降-夾緊-提升-放松-夾緊;按設置鍵,設備進入單周自動運行的各時間段的時間設置模式。從1-4分別為:下降時間,上升時間,夾緊時間,移動時間依次增循環選擇,按一次設置增1,到4后回1,在設置過程中,按下取消鍵,直接返回到控制狀態;例如下降時間的設置:按設置鍵,尾數為7時為下降時間設置,此時讀出原來的下降時間值,在此基礎上,通過+1,-1鍵增減到所設定的值(差值為1秒)。此時,如按保存鍵則保存設置值并進入下一個參數,直到4個參數設置完成,即在顯示6時,按下保存后進入控制狀態,結束設置過程;如按取消鍵則不保存直接進入控制狀態,結束設置過程;在設置狀態下,被設置的那個參數通過數碼管和下方的指示燈均有顯示;開關接通后兩分鐘內沒有操作,設備進入休眠狀態,此時電源燈亮,如需操作,需先按一下復位鍵讓設備重新開始運行。
5.2 手持器主程序流程
手持器主程序流程為上電后,首先對器件進行初始化操作,即完成寄存器初始值設定、外圍部件初始化等系統配置;讀取存儲器的的設置數據,并配置。隨后發送全停命令,以便與主機握手;隨后可進行設制與控制,并將數據值轉換為相應BCD碼送至顯示模塊,在LED數碼顯示管上完成對數值的顯示;采用查詢方式對鍵盤進行掃描,通過按鍵控制向主控制器發送命令控制主機動作。
6 控制系統調試
系統調試包括硬件、軟件調試兩大部分,其目的是為了及時發現系統設計中的錯誤和不完善的地方,對其加以修改,以實現系統的正常運作。兩臺或多臺881模塊要進行通訊,則各臺模塊的頻率和空中速率必須一致。模塊與用戶設備要進行通訊,則模塊和用戶設定的串口參數必須一致。在本設計的軟件的編程過程,先使用調試助手對控制器的簡單功能進行測試,完成后與主控制器聯機調試,并對設備的性能進行進一步的改進,直到成功。
參考文獻:
[1]梁景凱,蓋玉先.機電一體化技術與設計[M].機械工業出版社,2014.
[2]李夢紅,李捍東.基于STC89C52單片機的無線遙控小車設計[J].自動化與儀器儀表,2015(06).
基金項目:江蘇省淮安市科技支撐計劃,公路雨水井智能清掏機器人的研究與推廣,編號:HAG20120009。
作者簡介:趙廣義,主要從事:重機電產品設計開發與推廣應工作。endprint
