
淺談GPS測定正常高
2015-11-04 12:16:48李志鵬付江濤
山東工業技術 2015年21期
李志鵬+付江濤
摘 要:GPS測量技術以其自動化、高效率、高精度、全天候等優勢,得到了廣泛應用。由于GPS測量的高程系統不同,需要將GPS測量的大地高轉換為我國法定高程系統(正常高系統)。我們將分析測量數據,討論GPS高程測量可以滿足我國高程系統要求。
關鍵詞:GPS;正常高;高程擬合;高程測量
DOI:10.16640/j.cnki.37-1222/t.2015.21.112
0 引言
高程測量方法一般有水準測量、三角高程測量、GPS高程測量。水準測量和三角高程測量是通過測定兩點間的高程差來求出正常高。雖然這種方法直接快速,但實施起來費時費力, 工作效率較低。隨著GPS測量技術的發展, 以其自動化、高效率、高精度、全天候等優勢引起測繪界的廣泛關注。通過一定數量的已知GPS點,建立工作區域的高程模型,進而計算出其它未知點的高程,這將極大地減輕外業工作量,提高工作效率。
1 正常高
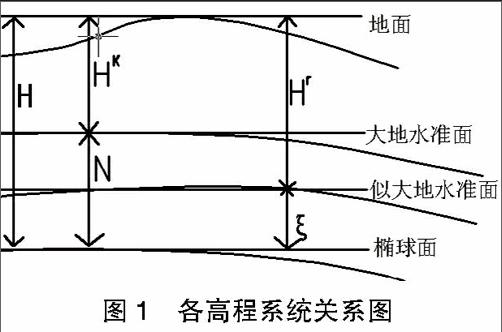
莫洛堅斯基于1945 年提出了正常高的概念, 即地面點沿鉛垂線到似大地水準面的距離()。由于γm是待定點的正常重力值,所以正常高可以通過重力值求得。由各地面點沿正常重力線向下截取各點所構成的曲面, 稱為似大地水準面, 它是正常高的基準面。目前我國法定高程系統采用的是正常高,而GPS高程是WGS-84坐標系中的大地高(大地高是從一地面點沿過此點的地球橢球面的法線到地球橢球面的距離),想要使GPS高程在工程實際中得到使用,必須實現GPS大地高向正常高的轉換。
2 GPS測定正常高
通過GPS網中已知點的大地高進行GPS網平差,可以得到網中各點大地高H1。如果同時已知該點的正常高H2,水準測量得到其他GPS點與該點的正常高差h,則各點的高程異常(a=H1-H2-h)。當認為已知大地高無誤差時,由GPS網得到的大地高具有相當高的精度,同時由水準測量得到的正常高差h,故可以求得高精度的似大地水準面。通過已知點上的異常值擬合出工作區域的似大地水準面,進而計算出未知點上的高程異常,利用公式(a=H1-H2-h)反向求出未知點的正常高。
3 實例分析
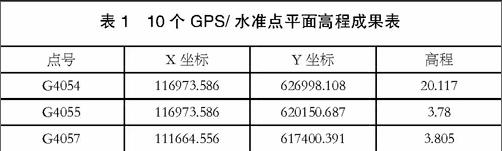
小港鎮首級GPS控制網,采用北京清華山維測量技術開發公司開發的軟件(NASEW3.0)進行控制網平差,由軟件根據已知點的高程計算出各個待求點的高程。為分析曲面擬合模型的精度,特選取其中分布均勻的10個一級控制點,該10個控制點可構成一小區域控制網,并對其進行GPS測量和水準聯測,水準路線總長約為40km,平均兩點間距離約為6.5km,其中G4057, G4059,G4063,G4066為GPS控制點進行水準聯測,其余6個為檢核點。
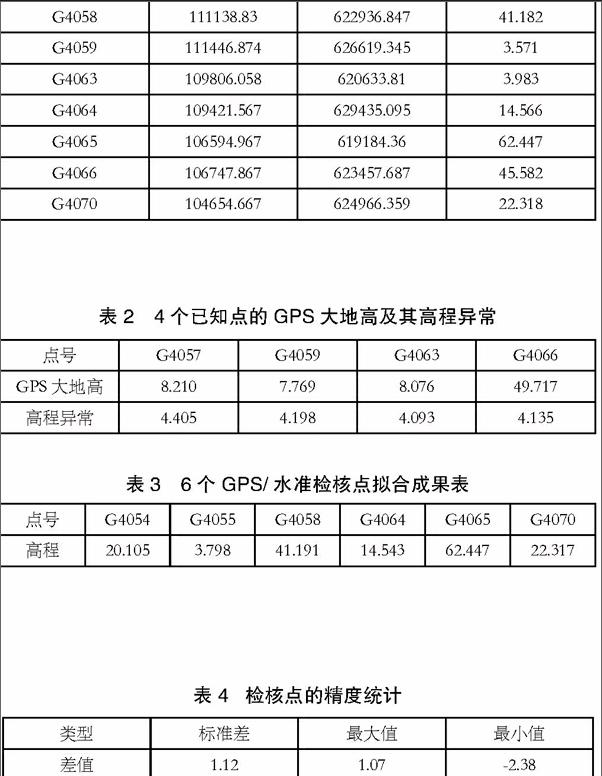
采用文獻中的高程數據轉換擬合軟件,得出表2。
通過程序計算出已知點和檢核點上的標準差、最大值、最小值,列于表[4]。
4 結論
通過一定數量的已知點和GPS點高程聯測,建立工作區域的高程異常模型,實現GPS大地高向正常高的轉換,計算出未知點的正常高。利用北京清華山維測量技術開發公司開發的軟件(NASEW3.0),根據已知點高程計算出各個未知點高程,并對全網進行高程分析,我們得出GPS高程測量的標準差、最大值、最小值滿足要求。
參考文獻:
[1]劉立龍,林文介.GPS測定正常高的方法研究[J].桂林工學院學報,2001(03).
[2]Shresha R.把GPS 大地高轉化為正高時的曲面內插技術[J].武測譯文,1994(02):1-11.
[3]陶本藻.GPS 水準似大地水準面擬合和正常高計算[J].測繪通報,1992(04):14-18.
[4]劉長建,吳洪舉,張俊.GPS 水準擬合方法的比較與軟件編制[J].信息工程大學報,2006(01).
[5]張大倫,耿繼原,馬力.基于VC的GPS 高程的應用研究[J].華北師范學院學報,2006(03).endprint
