MEMS慣性測量組合在系統中的一種測試方法
2015-11-05 07:09:36創新者沈利華蔡燕斌
中國科技信息 2015年18期
創新者:楊 靜 沈利華 蔡燕斌 石 磊
MEMS慣性測量組合在系統中的一種測試方法
創新者:楊 靜 沈利華 蔡燕斌 石 磊
目前,MEMS慣性測量組合在我國航天器上處于應用起步階段,工程中需要解決的實際問題還很多。本文提出的測試方法,針對MEMS慣性器件精度較低的特點,采用對慣組輸出求模并進行一段時間均值計算,根據慣組精度選取合適的判據,在系統工作中可對慣組的多項指標進行檢驗。
綜述
MEMS基本原理
MEMS(Micro Electro Mechanical Systems,微機電系統)是指可批量制作的,集微型機構、微型傳感器、微型執行器以及信號處理和控制電路,直至結構、通信和電源等于一體的微型器件或系統。MEMS將電子系統和外部世界有機地聯系起來,感受運動、光、聲、熱等自然界信號并轉換成系統可處理的電信號,并進行放大、計算等處理,通過微執行器對外界發生作用。MEMS工作原理如圖1所示。
MEMS慣組應用現狀
MEMS慣性器件是指采用MEMS技術研制的陀螺或加速度計,它采用具有壓電效應的微型傳感器敏感到運動體的角速度與視加速度,通過信號處理和控制電路輸出不同的電壓。MEMS慣性器件一般以硅為主要材料,硅材料的強度與硬度與鐵相當,密度類似鋁,熱傳導率接近鋁和鎢,使器件可以達到較好的機械電氣性能。同時,采用硅微加工工藝,在一定硅片上可以同時制造成百上千個完整器件,批量生產時可以大大降低成本。MEMS慣組則是采用MEMS陀螺與加表構建的慣性測量組合(下文簡稱慣組)。
目前,在我國的航天器上采用的慣組,其慣性器件多為撓性陀螺、激光陀螺、光纖陀螺、撓性加速度計、石英加速度計等,采用MEMS慣性器件構建的慣組剛處于應用起步階段,工程中需要解決的實際問題還很多。例如:如何對MEMS慣組進行更有針對性的測試,以驗證其是否滿足使用要求;如何提高MEMS慣組的精度;如何加強MEMS慣組對力學、電磁、大氣、核輻射等環境的適應能力等,以滿足各種復雜工程條件的需求等。此外,還應加強對除慣性器件外其它MEMS器件的了解,把握MEMS技術發展現狀,最后達到在航天器系統上大量使用MEMS器件,以最低的成本滿足系統要求,解決航天器系統小型化、輕質化及低成本的問題。
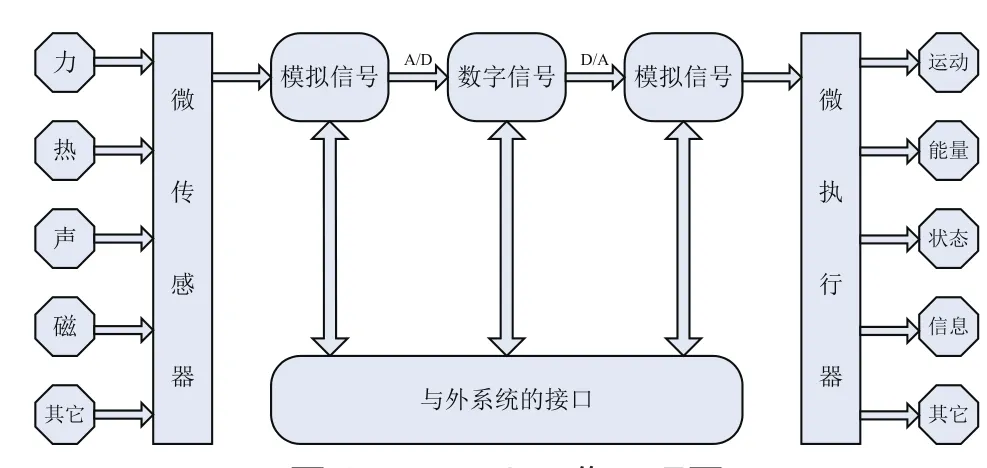
圖1 MEMS工作原理圖
本文提出的是MEMS慣組在控制系統中的一種測試方法,針對MEMS慣組單表精度較低的特點,采用對慣組輸出的兩種物理量分別求模,并計算一段時間內均值的方式,對慣組的零偏穩定性與零偏重復性同時進行檢驗,以達到在系統測試中對慣組指標進行驗證的目的。
測試方案
在一些相關的國軍標中,對于單獨的陀螺儀與加速度計各項指標的測試方法均已進行過規定,如:零偏穩定性、零偏重復性、標度因數非線性度、標度因數重復性等。其中零偏穩定性一般指一次通電以后的零次項漂移值,也稱零漂;而零偏重復性則是指在同樣條件下及規定時間間隔內,多次通電零偏相對其均值的離散程度,可分為逐次啟動重復性、逐日啟動重復性。由于MEMS慣組本身具有零偏較大(單軸陀螺零偏可達100°/h以上),標度因數非線性較差(1000ppm)的特點,而且慣組在交付給系統使用之前已對各項指標進行過逐項測試,因此,本文所提出的測試方法,不對單項指標進行獨立測試,而是針對MEMS慣組的整機進行系統靜態測試,是一種可以驗證慣組整機零偏特性(同時包含零次項漂移與逐次啟動重復性)的測試方法。
測試條件
MEMS慣組由于其敏感器件的特殊性,其處理電路一般位于慣組內部最接近敏感器件的地方,多為A/D采集電路。故對外輸出一般采用串口或其它數據總線接口,不同于傳統慣組的多路脈沖輸出。為對慣組進行測試,需要準備可供慣組工作的電源、可接收慣組輸出數據并進行工具誤差補償的計算機、測試電纜。
測試方法
靜態輸出測試的測試方法為:將慣組靜止擺放,對三軸輸出角速度矢量與加速度矢量分別求模。對于精度較高的傳統慣組,其輸出測試值應為地球自轉角速度(約15.041067°/h)以及當地的重力加速度go。對于精度較差的MEMS慣組,由于自身的單軸零偏已遠遠大于地球自轉的角速度,可近似認為輸出角速度的模反映了慣性器件的零偏。因此,選取合適的判據,則可以同時考核穩定性與重復性兩項指標。
將慣組靜置于固定基座上,當其輸出穩定后開始進行測試。MEMS慣組一般采用線性模型,陀螺對于重力的敏感因素(g敏感系數)由于為極小量,一般不予考慮。
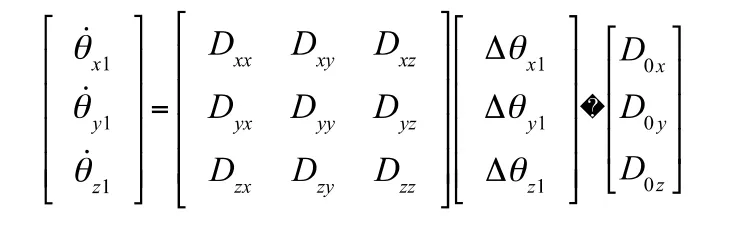
對陀螺的輸出按照標定參數進行工具誤差補償,如下:
根據慣性器件的實際指標設置合格判據:
在國外,MEMS加速度計的精度指標已基本能滿足戰術導彈的應用要求,MEMS陀螺性能也已接近或達到戰術級導航的水平,目前最高性能已達到1°/h,根據預測,MEMS陀螺性能極限約在0.01°/h。從需求來看,10°/h到0.01°/h的陀螺將可以滿足將來一些低成本航天器的使用要求。
在國內,完全由擁有自主知識產權進行設計加工生產的陀螺零偏穩定性最好可達到50°/h,個別較好的器件已可以達到10°/h以內,但與國外相比還有一定的差距,其批量生產時性能的穩定性、器件的完好率都有待于提高。目前國內的研究在單個元件的設計、研制上,多傳感器集成方面還有大量的工作要做。
例如,對于一臺MEMS慣組,若其陀螺零偏重復性為100°/h(1σ),穩定性為50°/h(1σ);加表零偏重復性為1mg(1σ),穩定性為1mg(1σ)。則合格判據可設置為:

0.996536go≤A≤1.003464go,go為測試當地的重力加速度。
其中,?θx1,?θy1,?θz1為從慣組串口輸出的三個方向原始數字量,D0x,D0y,D0z為陀螺零次項系數,Dxx,Dyy,Dzz為陀螺刻度因子,Dxy,Dxz,Dyx,Dyz,Dzx,Dzy為安裝誤差。
對加表的輸出按照標定參數進行工具誤差補償,如下:

其中,?Wx1,?Wy1,?Wz1為從慣組串口輸出的三個方向原始數字量,K0x,K0y,K0z為加表零次項系數,Kxx,Kyy,Kzz為加表刻度因子,Kxy,Kxz,Kyx,Kyz,Kzx,Kzy為安裝誤差。
設慣組的更新時間為τ,則慣組的每拍輸出即為上一段τ時間內的角增量δθx,δθy,δθz與視速度增量δwx,δwy,δwz。
將每個τ時刻的角增量與視速度增量進行累加,若n·τ=1s,則每累加n次得到慣組在當前這1s內的平均角速度ωx,ωy,ωz,平均視加速度Ax,Ay,Az。
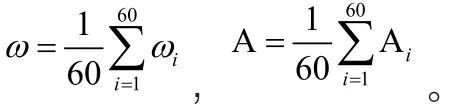
按下列兩式進行求模計算,得到慣組輸出的角速度ω(單位°/h)與加速度A (單位m/s2):

設置測試時長為60s,將60s的角速度之模與加速度之模分別進行累加并求得平均值:
結語
航天器控制系統正在朝著更小更輕更低成本的方向發展,而MEMS慣性器件以其制造加工工藝的不同而明顯區別于其它慣性器件,具備小型輕質低成本的特點。隨著我國MEMS器件的發展,未來必定會在航天器大量使用各種MEMS器件。本文所提出的MEMS慣性測量組合測試方法,是針對MEMS慣性器件精度較低的特點制定的一種簡單有效的方法,在根據慣組指標選取合理的測試判據后,可以方便應用于控制系統對于MEMS慣組的測試驗證。

楊 靜1沈利華2蔡燕斌2石 磊
1.北京航天自動控制研究所;2.宇航智能控制技術國家級重點實驗室
楊靜(1981-)女,碩士,高級工程師,控制系統電氣綜合設計專業,主要從事控制系統彈地綜合技術的研究;沈利華(1977-)男,碩研,高級工程師;蔡燕斌(1985-)男,碩研,工程師;石磊(1978-)男,碩士,工程師。
10.3969/j.issn.1001-8972.2015.18.019