基于捷聯導引頭測角信息的彈目相對位置估計方法
2015-11-15 05:12:46任高峰張擁軍張金鵬
航空兵器 2015年4期
關鍵詞:測量
任高峰,張擁軍,張金鵬,2
(1. 中國空空導彈研究院,河南 洛陽 471009;2. 航空制導武器航空科技重點實驗室,河南 洛陽 471009)
0 引 言
與傳統框架式導引頭相比,捷聯導引頭具備結構簡單、重量輕、體積小、成本低、可靠性高等優點,目前已經成為制導系統中一個重要發展方向[1-3]。然而,由于捷聯導引頭固聯安裝于彈體上,測得的角度信息與彈體姿態完全耦合,不能直接得到可用于制導的有用信息;同時,由于彈體姿態信息及導引頭測量信息中均含有測量噪聲,給目標信息提取增加了困難。因此,如何在含有噪聲并且與彈體姿態耦合的測量信息中提取可用的制導信息,成為制約捷聯導引頭使用的一項關鍵技術。
目前,由于比例導引律的廣泛應用,針對捷聯導引頭測量信息的視線角速度提取成為研究熱點。文獻[4]針對導彈運動過程中系統噪聲不斷變化這一問題,結合樣條濾波和IMM 算法設計IMM-SF 濾波器進行視線角速率估計,取得良好效果;文獻[5]系統地對多種具有代表性的解耦方案和視線角速率重構方案進行分析,包括附加速率補償法、抖動自適應法、相控陣雷達前饋補償法和卡爾曼濾波法,對各方案進行對比研究,總結了其在工程應用中存在的問題;文獻[6]在對全捷聯導引頭數學模型線性化展開的基礎上,提出微分結合穩態Kalman 濾波方法估計體視線角速度的方法;文獻[7]對全捷聯導引頭的去耦算法進行了研究;文獻[8-9]則針對寄生回路對制導系統的影響進行了分析。
然而,在導彈飛行過程中由于彈體姿態的運動可能使得目標在導引頭視場之外,僅提取視線角速度信息對處理這種情況難度很大,同時也限制了其他導引律的使用。因此,本文以導彈攻擊靜止目標為例,從分析系統的可觀性出發,利用奇異值分解的方法,提出一種基于捷聯導引頭測角信息的彈目相對位置估計方法。
1 算法的基本原理
如果導彈在多個時刻測得彈目視線方向,若導引頭測量和導彈測量時刻的姿態沒有誤差,則每次測得的視線方向均經過目標點,根據任意兩次的測量結果,結合導彈自身所攜帶慣導系統給出的導彈位置、姿態信息,就可以利用三角形關系求出目標點相對于導彈的矢量,進而得到目標在導航坐標系下的坐標,其原理示意圖見圖1。

圖1 算法的基本原理示意圖
導引頭的測量誤差、導彈測量時的姿態誤差都會使測得的彈目相對位置矢量和真實的彈目相對矢量方向存在一定偏差,造成多次測量得到的彈目相對矢量方向并不交于一點。為了使求取的坐標點與真實坐標點之間的偏差最小,采取求取一點坐標,使其到各次測量得到射線的距離平方和達到最小,其原理示意圖見圖2。

圖2 測量存在噪聲情況下的原理示意圖
假設第i 次測得的導彈-目標方向矢量~Ri=[limini]T,此時對應的導彈位置矢量Xmi= [xiyizi]T,目標位置矢量Xt= [x y z]T,則目標位置距離第i 次測量矢量之間的距離di可以表示為

假定取n個時刻的測量值對目標位置進行計算,取指標函數:

將式(2)對Xt求導得到

經整理得到

式(4)的解即為目標位置的最小二乘估計,為了后續描述簡便,將式(4)重新寫為

根據式(5)可知,當矩陣A可逆時,可以求得目標的位置。通過圖1 ~2 可以看出,當彈目相對運動方向與彈目連線方向相同時,構不成三角形關系,矩陣A 不可逆,得不到目標位置;當彈目相對運動方向與彈目連線方向成一定夾角時,構成三角形關系,矩陣A 可逆,可以求得目標點的坐標值。
2 系統可觀性分析
通過以上分析可知,當彈目相對運動方向與彈目連線成一定夾角時,矩陣A 可逆,系統可觀。然而,在實際系統中測量誤差和系統誤差不可避免,還需要考慮方程(5)在觀測量存在誤差時的求解穩定性問題。為了詳細分析,對矩陣A 進行奇異值分解,則式(5)可以變換為


對應的均方差為

可以看出,矩陣A的奇異值直接影響最小二乘解的方差,當矩陣A 呈病態時,A 會有一個或者多個接近于0 的奇異值σi,從式(8)可知,當σi很小時,最小二乘解的均方誤差將會很大,說明當存在測量噪聲時,系統求解得到的彈目相對位置有很大起伏,影響其在制導回路中的使用。
對于本問題,不論是δb 還是δA,均來自導彈本身的定位誤差、導彈姿態誤差、以及導引頭的測量誤差等因素,在具體的分析過程中,這種誤差對求解精度的影響用“條件數”這一概念進行評估。矩陣A 的條件數定義為A 的最大奇異值和最小奇異值之比,條件數越大,這種誤差對方程(5)的影響越大,求解穩定性越不好。當條件數趨近于1時,系統對測量誤差及導彈姿態誤差的抗干擾能力達到最強,圖3 ~4 是某典型條件下求得的條件數和奇異值。
從圖3 可以看出,某典型條件下系統中矩陣A的條件數持續在50 以上,并且最高時達到將近500,可以看出,對于此典型條件來說,系統求解得到的相對位置受測量噪聲和系統噪聲的影響較大,即系統可觀性不好。通過圖4 可以看出,系統有一個奇異值在零附近,其對應項的誤差將會因此而放大。

圖3 某典型條件下矩陣的條件數
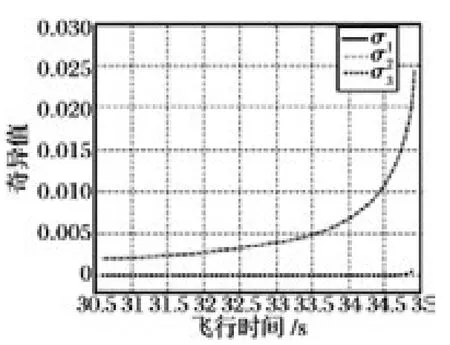
圖4 某典型條件下矩陣的奇異值
在導彈攻擊目標時,由于導彈朝向目標飛行,通常彈目視線方向和彈目相對速度方向夾角較小,這種情況下系統的可觀性比較弱,描述系統方程(5)屬于一個病態方程,對其進行求解需要特殊處理,以減少弱可觀條件下測量噪聲對算法結果的影響。
3 弱可觀條件下算法的適應性改進
基于多次測量的彈目相對位置估計問題可以歸納為一個病態方程求穩定解的問題。根據相關文獻報道,針對病態矩陣求穩定解的方法主要有截斷奇異值分解法和修正奇異值分解法[10]。本文采用截斷奇異值分解法對此問題進行求解,基本思路為:由于病態問題中最小二乘解不穩定的主要原因是系統方程矩陣存在接近于0 的奇異值,而使均方誤差趨向無窮大。一個直觀的想法就是去掉那些接近于零的奇異值,以損失估計的無偏性來換取均方誤差的減小。對于導彈攻擊靜止目標的彈目相對位置估計問題來說,只有一個奇異值接近0,而另外兩個處于相當水平。因此,求解步驟可以寫為
(1)選取n個時刻的測量值(測角信息)及導彈在慣性系下的位置和姿態信息;
(2)根據式(4)寫出方程AX = b 中矩陣A 和向量b 的具體形式;
(3)對矩陣A 進行奇異值分解,得出矩陣A 的奇異值σi及與奇異值對應的奇異值向量ui和vi,并對奇異值進行排序,假定σ1>σ2>σ3;
(4)判斷是否滿足條件σ1/σ3>R,其中R 為選定的閾值(在程序中選為5),若滿足,取n = 2,若不滿足,取n = 3,然后按照式(9)進行計算:

4 仿真驗證與分析
將設計算法在仿真環境中實現,對算法進行仿真驗證,導彈在飛行24.2 s 處截獲目標,為了考慮測得的相對位置方向矢量誤差對結果的影響,給出了造成該誤差的主要因素:導彈姿態誤差和導引頭測量誤差。圖5 給出了不同時刻對應的導彈姿態誤差,導引頭測量誤差為零均值的高斯白噪聲,對應的標準差為0.007 5 rad,圖6 ~9 給出了相應的仿真結果。

圖5 導彈姿態角偏差

圖6 彈目相對位置X 向分量
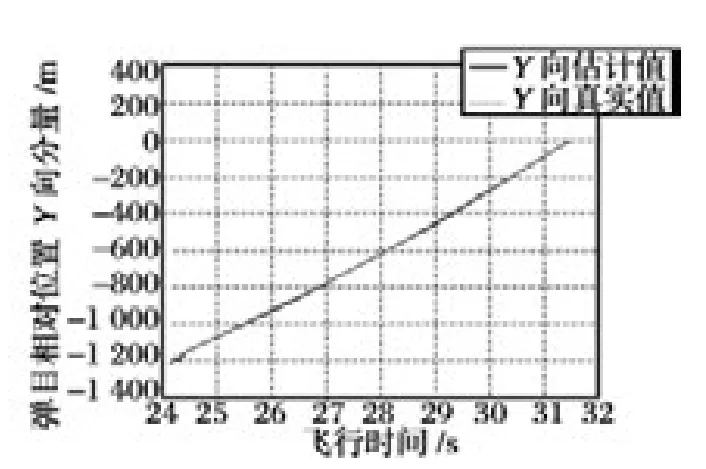
圖7 彈目相對位置Y 向分量

圖8 彈目相對位置Z 向分量

圖9 彈目相對位置估計誤差
根據圖6 ~8 可以看出,按照所提出的算法進行計算能夠得到穩定的彈目相對位置(所謂穩定,是指在系統噪聲存在的情況下,求得的彈目相對位置不會大范圍跳動,即方差過大);同時可以看出,在飛行末端3 s 內,該算法的估計精度在X 向小于3 m,Y 向估計精度在2 m 以內,Z 向精度在4 m 以內。
另外,從圖6 ~8 姿態誤差的逐漸減小和圖9中的估計誤差曲線趨勢可以看出,導彈姿態誤差是影響該算法估計精度的重要因素。
5 結 論
本文對基于捷聯導引頭測角信息的彈目運動相對位置估計方法進行了研究,主要結論如下:
(1)對于導彈攻擊靜止目標過程中的彈目相對估計問題而言,由于彈目視線方向與彈目相對速度通常不在一條直線上(若在一條直線上則導彈不需要控制直接攻擊目標),此時可以通過利用不同時刻測量彈目相對視線方向構成三角形的方法求解彈目相對位置;
(2)若利用不同時刻測角信息構建三角形對彈目相對位置進行估計,則需要考慮彈目視線方向與彈目相對速度方向夾角較小的情況,此時系統具有弱可觀的特性,受系統噪聲和測量噪聲影響較大;
(3)針對具有弱可觀特性的彈目相對位置求解問題,利用截斷奇異值求解的方法,可以獲得較為穩定的彈目相對位置,并且犧牲的系統無偏性誤差在可以接受的范圍內;
(4)該算法受姿態誤差的影響較大,在使用時,需要對導彈姿態誤差對估計精度的影響進行分析;
(5)本文沒有考慮測量野值對算法的影響,針對存在野值情況時對算法的進一步改進是下一步的研究工作。
[1]焦迎杰,王瀟,陳志堅.捷聯尋的制導技術在近程制導火箭中的應用[J]. 彈箭與制導學報,2012,32(1):13-17.
[2]蘇身榜. 捷聯尋的制導技術及其在國外的發展[J].航空兵器,1994(2):45-50.
[3]張躍,褚海榮. 全捷聯圖像導引頭制導的技術特點[J]. 光學精密工程,2014,22(10):2825-2831.
[4]梁彥剛,郝道亮,唐國金. 捷聯導引頭視線轉率估計的交互式多模型樣條濾波算法[J]. 國防科技大學學報,2014,36(5):70-74.
[5]賈鑫,羅艷偉,羅麗. 全捷聯導引頭解耦技術方法[J]. 戰術導彈技術,2013(1):77-81.
[6]孫婷婷,儲海榮,賈宏光,等. 捷聯式光學導引頭視線角速率解耦與估計[J]. 紅外與激光工程,2014,43(5):1587-1593.
[7]王琪,付書堂. 捷聯導引頭去耦算法研究[J]. 航空兵器,2012(6):7-9.
[8]王嘉鑫,林德福,祁載康,等. 全捷聯導引頭隔離度對制導穩定性的影響[J]. 紅外與激光工程,2013,42(10):2608-2613.
[9]李富貴,夏群利,祁載康,等. 全捷聯導引頭寄生回路影響與辨識矯正[J]. 系統工程與電子技術,2013,35(8):1717-1722.
[10]盧波. 病態問題的奇異值分解算法與比較[J]. 測繪信息與工程,2011,36(4):19-22.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00