人類雙眼定位原理分析
2015-11-16 08:18:36寶青蘭
中國科技信息 2015年2期
關鍵詞:人類
寶青蘭
人類雙眼定位原理分析
寶青蘭


寶青蘭
內蒙古通遼市奈曼旗蒙古族中學
寶青蘭(1974-)女,學士,中教一級,研究領域為物理學,人工智能。
引言
人類獲取的外界信息多種多樣,主要包括:視覺、聽覺、觸覺、嗅覺、味覺等等,其中80%的外界信息是通過視覺得到的。在大量的視覺信息中,對目標的形狀、結構、位置等進行分析時均需要目標定位,因此人眼定位對于目標跟蹤、識別、人類行走和避障具有重要的意義。
人眼結構與成像原理
人眼主要由角膜、睫狀肌、晶狀體、玻璃體、視網膜和視神經六部分組成,并且人眼符合凸透鏡成像原理,在視網膜上呈現(xiàn)倒立的實像,如圖1所示。其中晶狀體是一個可以調節(jié)焦距的凸透鏡,從而保證物體在視網膜上成倒立清晰的實像。
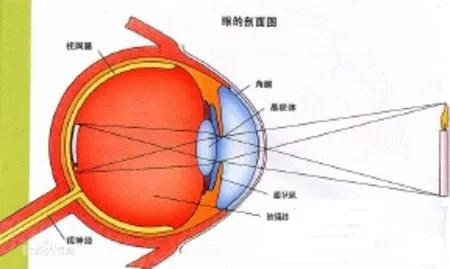
圖1 人眼結構圖
根據(jù)凸透鏡成像原理知,對于給定的凸透鏡(即焦距f不變),當物距增大時,像距減小;反之,當物距減小時,像距增大。然而人的眼球直徑不能變化,為了在視網膜上得到清晰的實像,所以需要調節(jié)凸透鏡(晶體)的焦距f,保證觀測到清晰地目標。
目標定位原理
坐標系及其變換
設:左、右眼的瞳孔分別為OL、OR,左、右眼的視網膜黃斑位置分別為O`L、O`R,則世界坐標系為,以的中點O作為坐標原點作為x軸,雙眼正前方作為z軸,按右手定則確定y軸;對于左眼以OL點作為坐標原點作為zL,向右眼方向作為xL,按照右手定則確定yL軸,故得到左眼的局部坐標系OLxLyLzL;同理,可得到右眼的局部坐標系ORxRyRzR;,pL、pR分別為視網膜平面且分別平行于OLxLyL、ORxR平面,如圖2所示。
根據(jù)空間中三維剛體變換關系知
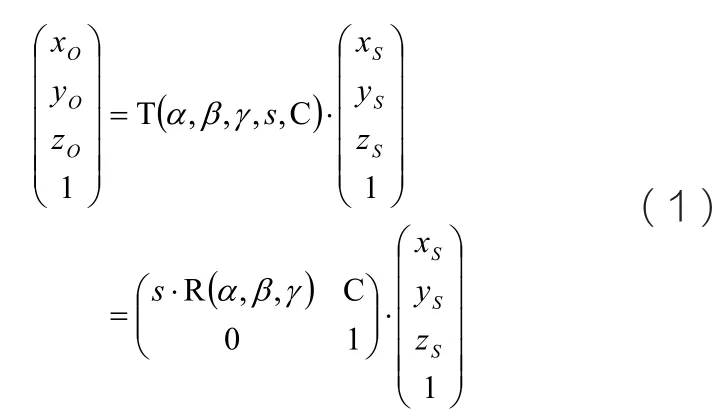
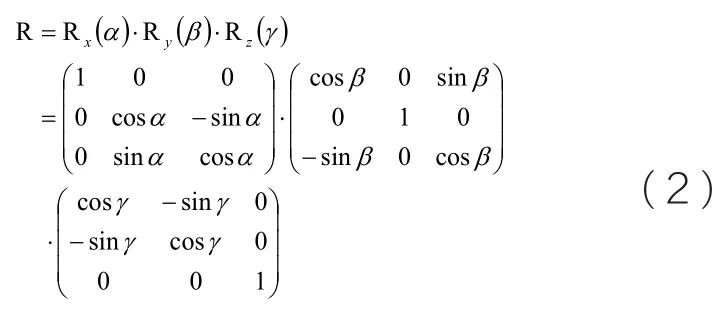
其中a、b、g分別為繞x軸、y軸和z軸的旋轉角度。
因此,左、右眼坐標系與世界坐標系之間的變換關系為
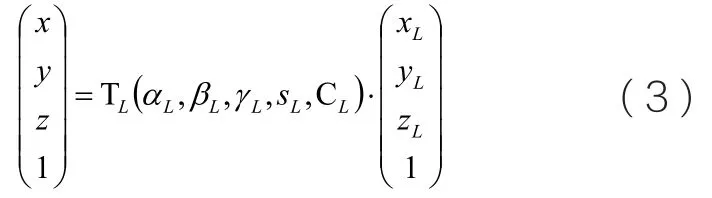
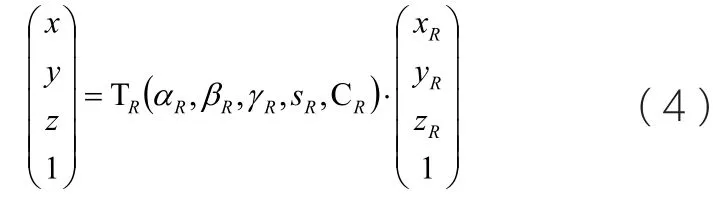
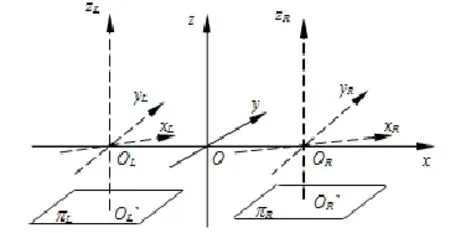
圖2 世界坐標系與局部坐標系
為了計算簡單,通常各坐標系選用相同的單位長度,所以尺度參數(shù)一般取sL=sR=1。另外,由于世界坐標系的原點位于左、右眼坐標系原點的中點,所以平移向量與兩眼的距離L相關,一般取
目標定位分析
為了便于進行成像分析,將人眼的凸透鏡成像簡化為小孔成像。現(xiàn)已知眼球的前后徑長度d(即和兩眼之間的距離L(即根據(jù)光線直線傳播特性和小孔成像原理,空間中的目標M在視網膜上成縮小倒立的實像,則可以得到目標點M在左、右眼中的像點mL、mR,如圖3所示。
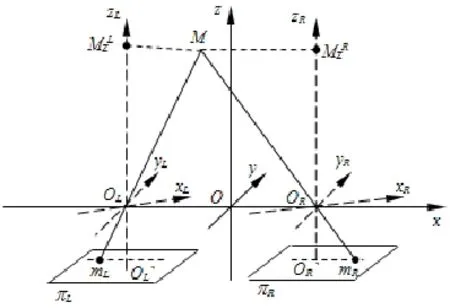
圖3 人眼單目標成像原理
設:目標點M和左眼中的像點mL在左眼坐標系中的坐標分別為目標點M和右眼中的像點mR在右眼坐標系中的坐標分別為所以根據(jù)小孔成像原理及光線直線傳播特性有


式中kL、kR為比例因子。依據(jù)左、右眼坐標系與世界坐標系之間的變換關系式(3)、(4)得到目標點M在世界坐標系下的齊次坐標為
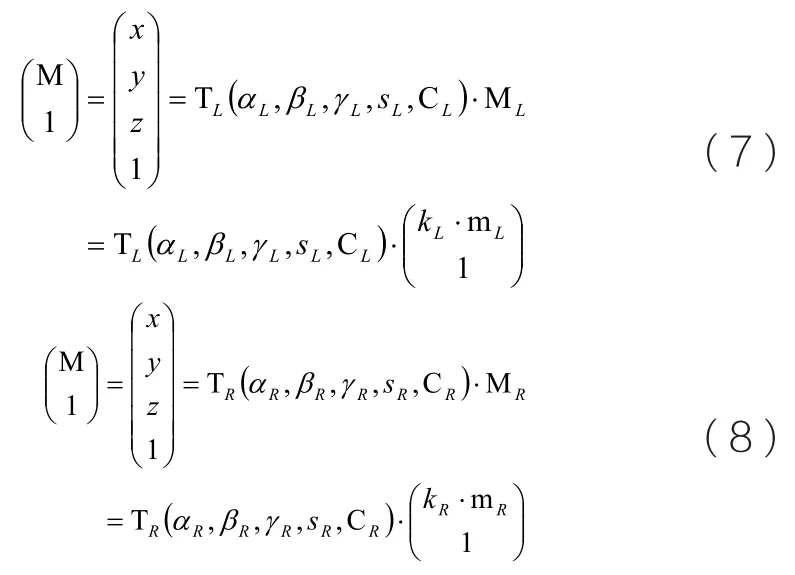
由此得
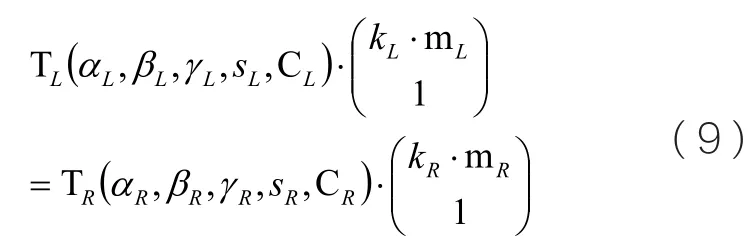
當人眼觀測目標時,眼球旋轉、晶體調節(jié)焦距,是的目標在視網膜上成倒立的實像,所以參數(shù)和以及像點坐標mL、mR是已知的。又因已知世界坐標系的位置和兩眼同空間的距離L,故平移向量CL和CR是確定的。
因此,可以利用式(9)所確定的方程求解比例因子kL、kR,再根據(jù)式(7)或式(8)計算出目標點M在世界坐標系下的坐標。人類是利用眼睛獲得的像點信息和先驗保存的雙眼瞳孔距離,經過大腦分析得到目標相對于人的位置關系,從而實現(xiàn)了雙眼對空間目標的定位。
結語
人類的視覺定位是進行目標識別、跟蹤以及人類行走和避障的重要基礎。本文根據(jù)人眼成像原理,結合三維空間變換理論,利用目標在雙眼的像點坐標,經過大腦分析、計算出目標相對于人(即世界坐標系)的空間坐標,因此實現(xiàn)了人類雙眼的目標定位。
內蒙古自然科學基金(No.2012MS0931)
10.3969/j.issn.1001-8972.2015.02.005
猜你喜歡
哈哈畫報(2022年4期)2022-04-19 11:11:50
大科技·百科新說(2021年6期)2021-09-12 02:37:27
英語文摘(2021年2期)2021-07-22 07:56:54
小哥白尼(神奇星球)(2020年8期)2021-01-18 05:13:32
小哥白尼(神奇星球)(2020年8期)2021-01-18 05:13:26
小哥白尼(神奇星球)(2020年7期)2021-01-18 05:07:18
好孩子畫報(2020年5期)2020-06-27 14:08:05
小學科學(學生版)(2020年2期)2020-03-03 13:40:16
作文成功之路·小學版(2019年5期)2019-08-23 08:13:18
意林·全彩Color(2019年6期)2019-07-24 08:13:50