船底安裝深水多波束EM710方案研究
2015-11-16 08:18:38梁春江
中國科技信息 2015年2期
梁春江
船底安裝深水多波束EM710方案研究
梁春江


梁春江 莫海泉
中海油田服務股份有限公司
本文針對非專業科考船加裝深水多波束測深儀EM710實際技術需求,結合EM710型深水多波束的系統安裝要求,對船舶結構展開調研,研究設計出可行的安裝方案,最后經海試驗證整套安裝方案的適用性,并帶來經濟效益,為EM710型深水多波束設備的研發應用推廣提供了參考,拓展了深水多波束的安裝技術手段。
引言
深水多波束是近年新興的主要用來測量深水海域海底地形、地貌和水體特征數據,通過采集原始聲學數據生成海底三維成像的專業工程設備,廣泛應用于鉆井船、鉆井平臺就位前海底測量、海底管纜鋪設、物探井場調查等項目中。
目前,海洋資源開發逐步走向深海領域,對深水多波束需求量越來越多,工程技術要求也越來越高。很多非專業科考船舶在建造伊始并沒有設計安裝深水多波束系統,缺少多波束換能器的預留的船底開孔安裝位置、電纜通道、甲板單元布放空間、輔助的姿態傳感器、羅經等設備。
本文由于此次要求將EM710深水多波束測深儀安裝于一艘非科考船上的項目實際需求,就要充分調研現有的硬件環境,結合深水多波束EM710系統的特點,自主設計研發出一套適用的安裝方案,數據采集效果可以等同于專業的科考船的多波束測量作業。
EM710系統安裝的硬件結構分析
EM710系統自身主要由換能器、甲板單元、數據采集工作站構成,要安裝多波束數據采集系統,需要同時安裝輔助設備: DGPS定位系統、羅經、姿態器、表層實時聲速儀,否則多波束設備無法采集到正確的聲學數據。
綜合考慮多波束EM710對輔助設備的技術要求和輔助設備的采購成本,將輔助設備的配置如表1所示。
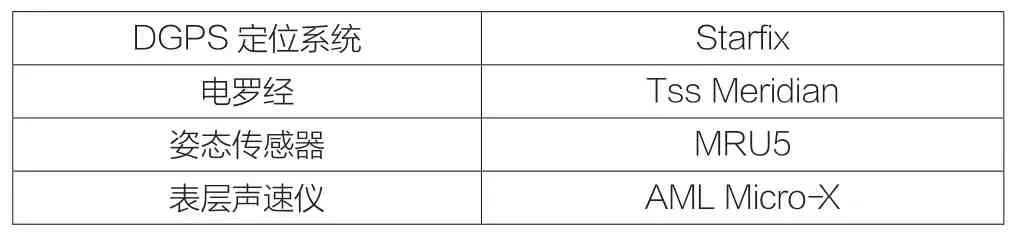
表1 輔助設備表
整套多波束數據采集系統的硬件連接圖如圖1所示。
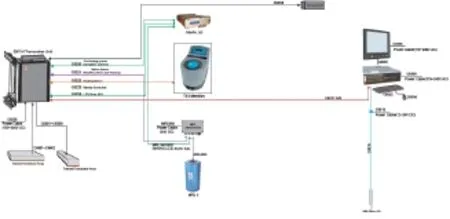
圖1 硬件結構接圖
換能器的安裝
換能器的安裝位置選擇
換能器固定安裝于導流罩內,導流罩的安裝位置應優先考慮三分一船艏部的肋位區間中船底較為平坦的位置,避免受到船舶航行引起的船底大量的氣泡和水流的影響。考慮到換能器和導流罩的重量因素,應優先選擇船底板較厚、船體肋位有加強結構的船底位置。
換能器導流罩的加工制造
通過參考原廠圖紙自主加工水滴形導流罩,避免了導流罩本身在船舶航行中產生的水流和氣泡對聲學數據采集的影響,同時也盡量降低了將導流罩本體產生的水阻,將導流罩通過焊接固定安裝于船底。
甲板單元的安裝
安裝甲板單元前,因甲板單元內主要是電路板,為防止設備受船體震動的影響,應首先安裝減震支架,參考減震支架的法蘭片加工固定于固定墻體上的對應的法蘭盤。
由于非專業的科考船上沒有設備儀器房,加之換能器的電纜只有25m長,經過電纜通道到達水線上后只剩余10m,無法進入船舶艙室內部進行固定安裝,所以專門為多波束的甲板單元設計并加工了一個儀器間,如圖2所示。
儀器間內部裝有空調,用來保持空氣濕度,同時加裝有UPS,防止船電不穩對電子元器件造成傷害。
輔助設備的安裝
DGPS和羅經系統的安裝
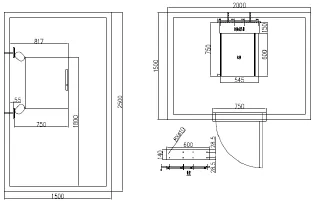
圖2 甲板單元的儀器間
圖3 MRU5的配置
將Starfix的天線固定安裝于駕駛臺頂部開闊處,將Tss Meridian電羅經固定安裝于駕駛臺龍骨位置的正上方,將“0”度方向指向船頭。然后進行DGPS和羅經的校準即可。
MRU5的安裝
因MRU5的數據輸出時是參考船舶CG點計算出來的,為了減少誤差,將MRU5固定安裝于距CG點盡量接近的位置。
經準確測量MRU5中心點的位置與CG的三維位置,將相對位置輸入到配置菜單中,MRU輸出的姿態數據即為正確數據。
表層聲速儀的安裝
將表層聲儀固定安裝于多波束換能器的下表面接近的位置,且其傳感器于多波束的下表面處于同一水平面,這樣就可以保證測量的聲速值是換能器收發聲波處的聲速值。
系統線路的設計與安裝
基于硬件結構接圖(見圖1),設計系統線路總圖如圖4所示。
系統通訊遵守標準通訊RS232數據通訊和網絡通訊協議。除表層聲速儀外的數據直接發送給工作站外,其他輔助設備的數據全部發送給甲板單元進行處理。
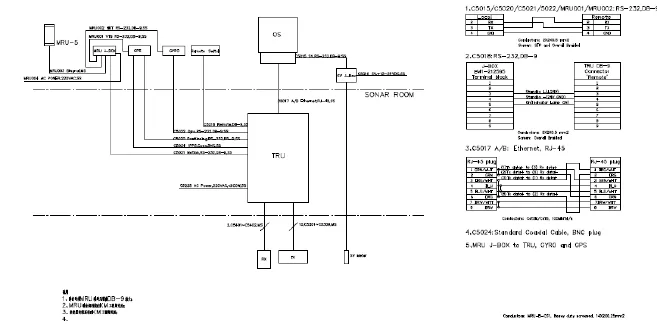
圖4 系統線路連接圖
系統測試
硬件測試
在海試中,打開EM710多波束數據采集系統的所有相關設備,發現多波束EM710自檢通過,所有輔助設備正常發送數據,系統硬件工作正常。
軟件測試
通過在海試中采集原始聲學數據數據,后經專業的多波束后處理軟件Caris處理分析數據,發現無明顯雜訊干擾,多波束數據采集良好,能夠滿足多波束作業的技術需求。
結語
基于一艘非專業科考船加裝深水多波束EM710的技術需求,本文通過分析該套系統和船舶本身的實際情況,研發設計出一套可行的系統安裝方案,并通過海試驗證了該方案的適用性,為深水多波束測深技術應用與推廣做出了貢獻。
10.3969/j.issn.1001-8972.2015.02.008
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00