基于CAE挖掘機鏟斗的力學及運動學分析
2015-11-16 17:50:29李志虎
筑路機械與施工機械化 2015年9期
李志虎

摘要:運用計算機輔助工程技術對挖掘機鏟斗的斗齒進行受力分析,利用ANSYS Workbench軟件建立鏟斗力學模型,完成鏟斗的有限元分析,得到鏟斗的優化結構;利用ADAMS/View模塊對挖掘機的工作裝置進行動力學分析,得到鏟斗斗齒的受力曲線和運動軌跡。結果表明:在不破壞鏟斗樣機的情況下,運用計算機輔助工程技術能夠模擬鏟斗的受力情況,節約企業生產成本,為挖掘機的實際生產提供一定的理論依據。
關鍵詞:鏟斗斗齒:受力分析;有限元分析;應變情況
中圖分類號:U415.51文獻標志碼:B
Mechanics and Kinematics Analysis of Excavator Bucket Based on CAE
LI Zhihu
(Transport Administration of Inner Mongolia Autonomous Region, Huhhot 010020, Inner Mongolia, China)
Abstract: CAE was applied to carry out the force analysis of excavator bucket teeth, and a mechanical model of the bucket was built with ANSYS Workbench. The finite element analysis of the bucket was finished based on the result of the force analysis, and an optimized structure was obtained. Kinematics analysis of the working device of excavator was conducted with View module of ADAMS, and the force curve and trajectory of the bucket teeth was found. The results show that without breaking the bucket prototype, using CAE to simulate the force condition of the bucket can lead to production cost saving.
Key words: bucket teeth; force analysis; finite element analysis; strain condition
0引言
挖掘機的作業過程是利用鏟斗的斗齒切削土壤,并將被切掉的土壤放入鏟斗內,當鏟斗裝滿土后,再利用液壓缸把鏟斗提升到指定位置,然后回轉至指定地點將土壤卸掉。在作業過程中,挖掘機的鏟斗是完成挖掘作業的執行部件,其性能好壞直接影響著挖掘機的工作效率,工作部件的可靠性嚴重影響挖掘機的使用壽命[1]。鑒于挖掘機鏟斗的重要性,國內外挖掘機制造商均投入大量的人力、物力和財力來研究其工作部件的可靠性和耐用性[2]。本文通過計算機輔助工程(CAE)技術的應用,以ANSYS和ADAMS軟件作為分析平臺,對挖掘機的鏟斗進行靜力學和動力學分析,為設計、制造挖掘機鏟斗提供相關的理論參考。
1建立鏟斗的力學模型
相似性原理是指兩臺挖掘機在已知尺寸、參數相似的條件下,假設一個或幾個相關參數,或者簡單的物理模型,來確定其他參數的相似系數,并列出參數的相關物理關系式,然后通過對原模型和所求模型的相應參數進行對比,求出相應的數值[3]。
本文以小松PC3007挖掘機作為參考模型,其主要設計參數如表1所示。根據上述相似性方法來確定挖掘機的各零部件的參數[4]。
根據小松PC3007挖掘機的具體參數,利用Solidworks軟件建立挖掘機各零部件的三維模型,并把各零部件三維模型組裝成挖掘機的整體模型,
表1小松PC3007挖掘機主要設計參數
參數名稱參數數值
工作重量/kg31 200
額定功率/kW245
標準斗容/m31.4
性能
尺寸
工作范圍最大行走速度/(km·h-1)高速
中速
低速
鏟斗挖掘力(最大)/kN
斗桿挖掘力(最大)/kN
全長/mm
全寬/mm
全高/mm
最大挖掘高度/mm
最大卸載高度/mm
最大挖掘深度/mm
最大垂直挖掘深度/mm
最大挖掘半徑/mm
在地平面的最大挖掘半徑/mm6.5
4.5
3.2
23 100
17 400
11 140
3 190
3 280
10 210
7 110
7 380
6 480
11 100
10 920
如圖1所示。
圖1挖掘機三維模型
2鏟斗的有限元分析
2.1鏟斗斗齒的受力分析
鏟斗斗齒對土壤的切削力和土壤對斗齒的切削阻力是一對作用力和反作用力。如圖2所示,鏟斗斗齒切削刃的幾何關系中,γ為前角,α為后角,δ為切削角,β為楔角,滿足δ=α+β;b為切削刃的寬度;h為切削層厚度[5]。endprint
圖2鏟斗斗齒切削刃的幾何關系
由表1可知,鏟斗最大挖掘力為226.38 kN,鏟斗斗齒為5個,分擔到各齒的切向切削力PC=22638/5=45.276 kN。通過SolidWorks三維軟件中的質量屬性,得到包括大臂、小臂、工作油缸等部件的質量為6 038 kg,換算成重量W=59172 kN。則縱向切削力PW=W/5=59172/5=11834 4 kN。
2.2鏟斗的有限元分析
ANSYS Workbench軟件是新—代的CAE分析環境和應用平臺。ANSYS Workbench包括分析工具Design Simulation、CAE建模工具Design Modeler和優化分析工具Design Xplorer。
根據國家標準GB 9141—88中關于液壓挖掘機結構強度的試驗方法,利用ANSYS Workbench軟件對挖掘機鏟斗進行模擬仿真。首先,設定鏟斗的材料為結構鋼(Structural steel),材料密度為785×103 kg·m-3,泊松比為03,楊氏模量為20×1011 Pa;其次,選擇單元為10節點的四面體單元(Solid 186) 作為鏟斗的實體模型;最后,用ANSYS Workbench軟件對每個鏟斗斗齒進行力的約束和加載。約束鏟斗與斗桿部件連接時,僅留出Y軸轉動的自由度。加載的參數為:切向切削力PC=45276 kN,縱向切削力PW=11834 kN,鏟斗的約束及加載情況如圖3所示。
圖3鏟斗的約束及加載情況
圖4鏟斗優化后的應力
圖4為鏟斗的應力情況,其最大值為25897 MPa。鏟斗的材料為50Mn,屈服強度為390 MPa,此時應力的最大值為22426 MPa,小于屈服強度,故鏟斗的應力滿足實際要求[6]。
圖5為鏟斗的應變,可以看到:應變程度最大的部位是位于鏟斗最左側和最右側的斗齒,最大變形量為6748 5 mm;此外,各斗齒的應變量分布不均勻。
圖5鏟斗的應變
2.3鏟斗的結構優化
為了解決斗齒應變集中的問題,使應變平均分布到各個斗齒上。首先,增加一個斗齒,并重新對斗齒的應變進行分布,使鏟斗左右兩側的第一個斗齒與鏟斗兩側壁之間保持一定的距離;其次,以每5 mm作為一個試驗距離,對鏟斗受力情況進行不斷試驗,最終推算出,當第一個斗齒與鏟斗內壁間距為40 mm以及斗齒間距為80 mm時,鏟斗的應變分布均勻。圖6為優化后鏟斗的應變,通過結構優化,鏟斗最大應變值由6748 5 mm 下降到3687 7 mm,應力變形分布趨于平均和合理。
圖6鏟斗優化后的應變
3鏟斗斗齒的運動軌跡仿真
3.1鏟斗斗齒的運動學理論分析
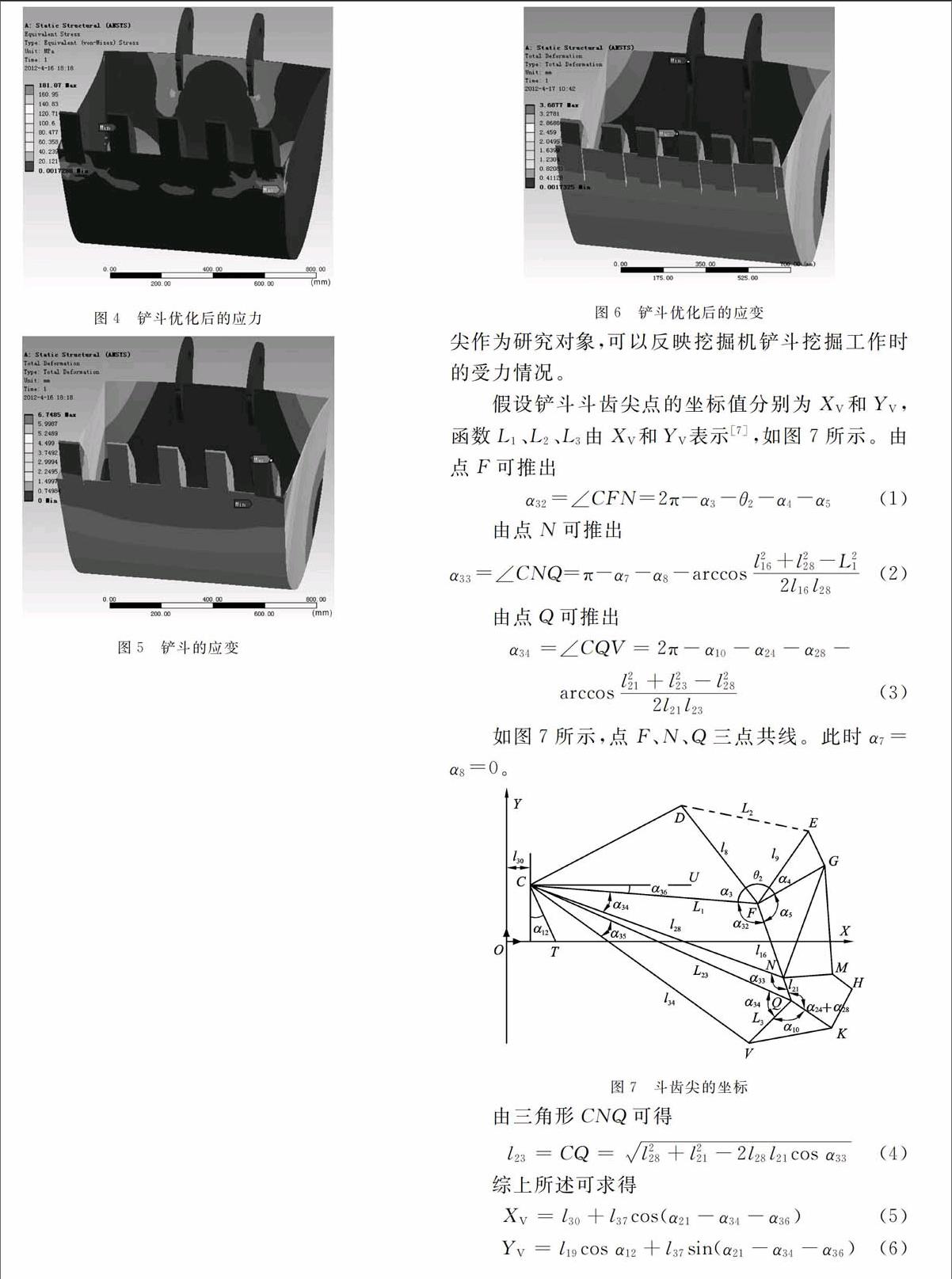
挖掘機工作裝置的幾何位置是由動臂缸的長度L1、斗桿缸的長度L2和鏟斗缸的長度L3 確定的。當L1、L2和L3為不同特定值時,反鏟工作部件會處于不同的工作位置。液壓挖掘機工作裝置是一組典型的平面連桿結構。鏟斗的斗齒作為挖掘機與土壤接觸切削的直接承受力的部件,主要承受土壤的切削力和土壤對斗齒的切削阻力。選擇一個斗齒的齒尖作為研究對象,可以反映挖掘機鏟斗挖掘工作時的受力情況。
假設鏟斗斗齒尖點的坐標值分別為XV和YV,函數L1、L2、L3由XV和YV表示[7],如圖7所示。由點F可推出
α32=∠CFN=2π-α3-θ2-α4-α5(1)
由點N可推出
α33=∠CNQ=π-α7-α8-arccosl216+l228-L212l16l28(2)
由點Q可推出
α34=∠CQV=2π-α10-α24-α28-
arccosl221+l223-l2282l21l23(3)
如圖7所示,點F、N、Q三點共線。此時α7=α8=0。
圖7斗齒尖的坐標
由三角形CNQ可得
l23=CQ=l228+l221-2l28l21cos α33(4)
綜上所述可求得
XV=l30+l37cos(α21-α34-α36)(5)
YV=l19cos α12+l37sin(α21-α34-α36)(6)
3.2鏟斗斗齒的運動學模擬仿真
虛擬樣機仿真軟件ADAMS是對機械系統運動學和動力學進行仿真分析的軟件。根據以上對挖掘機主要工作部件的運動學理論分析,在動臂油缸、斗桿油缸和鏟斗油缸上加載移動副;在駕駛室、鏟斗、動臂、斗桿各鉸點上加載轉動副;在鏟斗搖桿與鏟斗油缸的連接處加載球鉸副;在斗桿與斗桿油缸連接的鉸點位置加載平行副。在動臂油缸、斗桿油缸和鏟斗油缸的移動副上添加滑移驅動,設置一定的運動參數;在駕駛室與地面間的轉動副上添加旋轉驅動,設置一定的運動參數。
利用運動學理論分析,計算出挖掘機在ADAMS軟件中的STEP函數。挖掘機工作裝置中具體的STEP運動參數情況如下。
滑移驅動添加到動臂油缸的移動副上的運動參數為026·sin(time)。駕駛室旋轉的運動參數為(STEP(time,00,00,20,00)+STEP(time,28,00,38,15))。斗桿油缸的運動參數為(STEP(time,00,00,5,06)-STEP(time,09,00,14,03)+STEP(time,14,00,16,015))。
鏟斗油缸的運動參數為(STEP(time,00,00,05,05)-STEP(time,09,00,14,04)+STEP(time,14,00,16,01)+STEP(time,38,00,48,07))[8]。
在每個鏟斗斗齒內側的兩個端點建立Marker點,其坐標值分別為Marker_1039(-0392 511 m,-0038 937 m,1657 526 m)、Marker_1040(-0292 056 m,endprint
-0038 937 m,1657 526 m)、Marker_1041(-0221 256 m,-0038 937 m,1657 526 m)、Marker_1042(-0120 806 m,-0038 937 m,1657 526 m)、Marker_1043(-0050 006 m,-0038 937 m,1657 526 m)、Marker_1044(0054 494 m,-0038 937 m,1657 526 m)、Marker_1045(0121 04 m,-0038 937 m,1657 526 m)、Marker_1046(0221 49 m,-0038 937 m,1657 526 m)、Marker_1047(0292 362 m,
-0038 937 m,1657 526 m)、Marker_1048(0392 821 m,-0038 937 m,1657 526 m),共10個Marker點。為每個Marker點加載切削阻力PC和縱向切削力PW,受力方向與鏟斗在挖掘土壤時斗齒所受到的土壤的反作用力相同,如圖8所示。
圖8鏟斗在ADAMS/View受力的加載
為研究鏟斗的運動軌跡,將斗齒齒尖點(Marker_1046(0221 562 m, -0038 937 m, 1657 535 m))作為研究對象,分析鏟斗在挖掘過程中的運動軌跡以及該點的受力、位移等情況。通過ADAMS/View軟件菜單選擇Review→Create Trace Spline,然后選擇Marker_1046點,最后選擇大地(ground)作為參考系,經過仿真計算得到挖掘機鏟斗的運動軌跡AG,如圖9所示。
圖9挖掘機鏟斗的運動軌跡
曲線AG為鏟斗各運動組合的軌跡。其中AB曲線為鏟斗最初收斗的狀態轉化為伸開斗的運動軌跡;BCD曲線為鏟斗下降開始挖掘的運動軌跡; DEF曲線為端正準備移出挖掘坑穴的運動軌跡; FG曲線為鏟斗卸除物料的運動軌跡[912]。
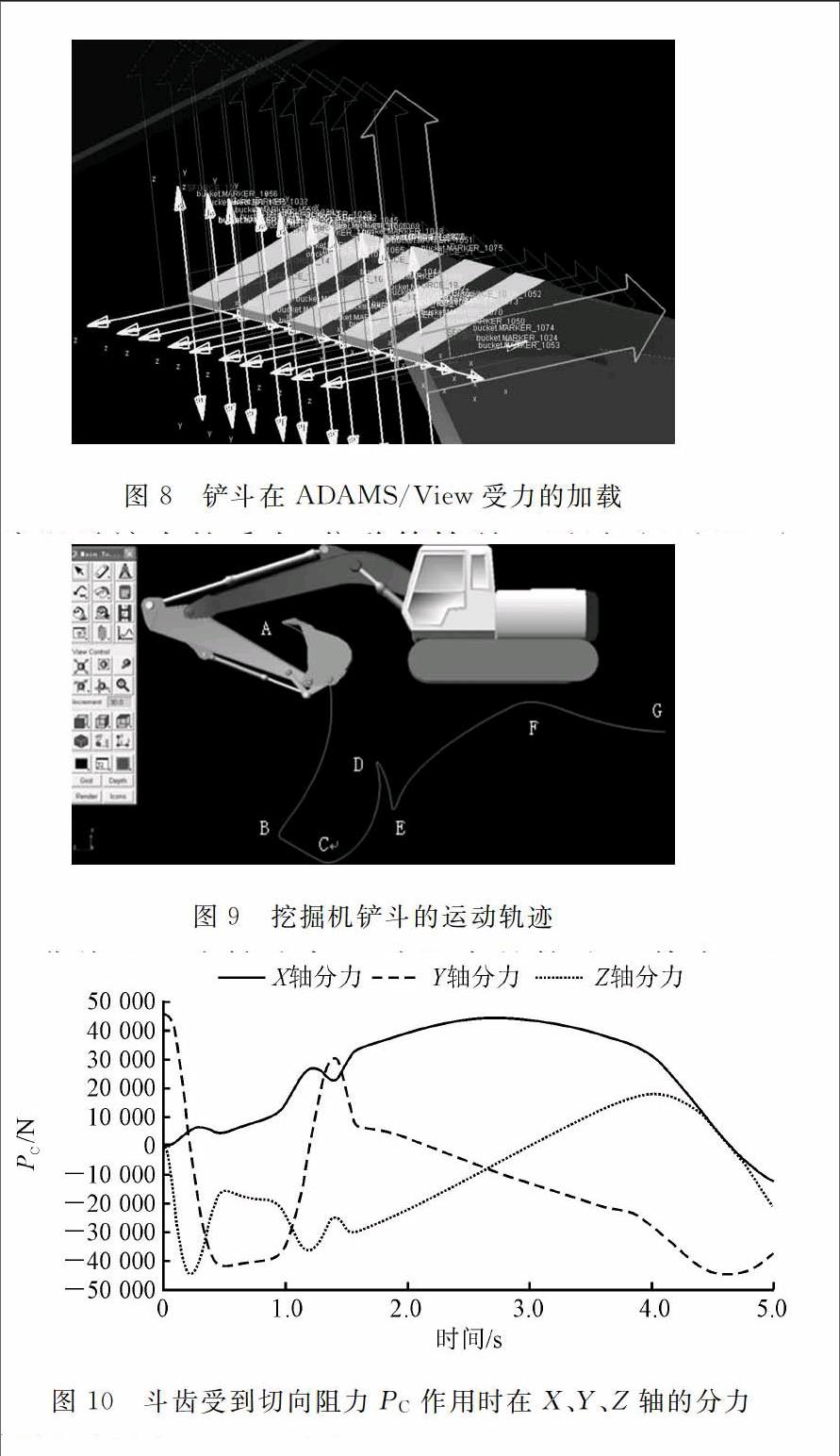
為了研究鏟斗斗齒受到切削阻力的變化情況,通過ADAMS分析軟件得到斗齒的切削阻力PC和縱向切削阻力PW隨時間變化在X、Y、Z軸上對應的分力,如圖10、11所示。
圖10斗齒受到切向阻力PC作用時在X、Y、Z 軸的分力
圖11斗齒受到切向阻力PW作用時在X、Y、Z 軸的分力
由圖10可知,鏟斗挖掘時斗齒受到的切向阻力PC在挖掘機鏟斗切削土壤275 s時,X軸上的最大受力值為40 000 N;鏟斗挖掘機剛接觸地面時切向阻力PC在Y軸上的最大受力值為45 000 N,鏟斗挖掘機切削土壤275 s時,切向阻力PC在Z軸上的最大受力值為17 500 N。
由圖11可知,鏟斗挖掘時斗齒受到縱向切削阻力PW在挖掘機鏟斗切削土壤14 s時,X軸上的最大受力值為6 000 N;鏟斗挖掘時斗齒受到縱向切削阻力
PW在挖掘機鏟斗切削土壤025 s和125 s時,Y軸分力呈現2個波谷,波谷谷值是在的最大受力值為-14 000 N左右;鏟斗挖掘時斗齒受到縱向切削阻力PW在挖掘機鏟斗切削土壤05 s時,Z軸上的最大受力值為11 000 N。
4結語
運用計算機輔助工程(CAE)技術,對挖掘機鏟斗進行仿真分析,并對每個斗齒的受力情況進行了研究。同時,運用ANSYS Workbench軟件完成對鏟斗的靜力學分析,通過對鏟斗結構的優化得到鏟斗的優化結構。運用ADAMS/View軟件模塊對挖掘機工作裝置作了動力學分析,同時對每個斗齒的
受力情況進行了研究,得出斗齒的受力曲線和運動軌跡。在不破壞鏟斗樣機的情況下,運用計算機輔助工程(CAE)技術,模擬挖掘機鏟斗樣機在挖掘作業時的受力情況,既節約了企業生產成本,又為挖掘機的實際生產提供一定的理論指導依據。
參考文獻:
[1]王桂新,楊彥龍.基于ADAMS的液壓挖掘機工作裝置的仿真分析[J].河北工業大學學報,2008,37(3):5963.
[2]武宏偉,權龍.負載敏感型挖掘機液壓系統能耗分析[J].液壓氣動與密封,2009(6):3438.
[3]丁華,朱茂桃,趙剡水.液壓挖掘機動臂的有限元分析[J].中國公路學報,2003,16(4):118120.
[4]尹健,劉志河.水平煤倉螺旋裝煤機模型試驗方法的分析[J].太原理工大學學報,2002,33(3):279281.
[5]閻書文.機械式挖掘機設計[M].北京:機械工業出版社,1991.
[6]王進.小型挖掘機的設計與性能分析[J].長安大學學報:自然科學版,2009,29(3):97101.
[7]林榮逢,馮麗.液壓挖掘機機械系統在ADAMS中的運動學仿真分析[J]機電技術,2010,33(1):7072
[8]同濟大學,太原重型機械學院,重慶建筑工程學院,等.單斗液壓挖掘機[M].北京:中國建筑工業出版社,1980.
[9]李新,周志鴻.基于ADAMS的挖掘機虛擬樣機最大挖掘力仿真測試[J]建筑機械:上半月,2011(4):8285.
[10]張芒國.機液一體化虛擬樣機技術研究[D].濟南:山東大學,2005.
[11]徐福祥,劉安心,黎宏.液壓挖掘機工作裝置的軌跡實現研究[J]機械制造與自動化,2009,38(4):159162.
[12]陳文華,賀青川,張旦聞.ADAMS2007機構設計與分析范例[M].北京:機械工業出版社,2009.
[責任編輯:譚忠華]endprint
