旋轉彈體及減旋片滾轉阻尼數值模擬
2015-11-17 05:48:20趙養正蔣勝矩黨明利朱中根
兵工學報 2015年7期
關鍵詞:模型
趙養正,蔣勝矩,黨明利,朱中根
(西安現代控制技術研究所,陜西西安710065)
旋轉彈體及減旋片滾轉阻尼數值模擬
趙養正,蔣勝矩,黨明利,朱中根
(西安現代控制技術研究所,陜西西安710065)
滾轉阻尼力矩導數是影響減旋效果的重要參數。采用求解定常流場的計算流體力學方法,對亞跨聲速階段帶減旋片翼翼身組合體的滾轉阻尼特性進行數值模擬。滾轉阻尼力矩導數數值模擬的結果與試驗值一致性較好。通過數值結果分析解釋了由于滾轉引起的彈翼氣流攻角的變化,表面壓力的變化,以及附加升力導致的滾轉阻尼力矩的形成原因,展示了薄翼片彎折的位置,同時從流場的角度展示了滾轉對彈體附近氣體流動的影響,以及滾轉引起的表面流線的彎曲,螺旋狀尾跡。
兵器科學與技術;滾轉阻尼導數;彈體;減旋片;數值模擬
0 引言
炮射末敏子彈藥在從母彈分離出來時具有較高的轉速,為了滿足末端尋的要求,需要將高速旋轉的彈體迅速降至所要求的轉速,矩形減旋片以其簡單的形狀常常被作為氣動減旋部件使用,其滾轉阻尼力矩(極阻尼力矩)系數導數是衡量減旋效果的重要參數,為了獲得這一參數并指導設計,過去常常采用工程估算的方法,但是對鈍頭體精度較差,目前采用數值方法計算復雜外形和非常規外形的動態導數替代風洞試驗和工程計算已成趨勢,文獻[1]對帶矩形翼的平頭旋轉體的滾轉阻尼力矩系數進行了試驗研究,文獻[2]對飛機標模的動導數進行了試驗研究,尤其是大攻角狀態下的動導數,均得到了很好的結果,但是動態試驗對高速旋轉驅動設備的調試、數據采集和處理技術要求很高,同時試驗費用大,周期長;相對試驗的方法求解動導數,數值方法簡單費用低,精度能夠滿足工程要求,逐漸成為研究熱點,文獻[3]采用求解定常流場的方法對格柵翼導彈的滾轉阻尼導數進行了計算分析,文獻[4-5]分別采用定常數值計算的方法計算了動導數,但在可用的文獻中,采用數值方法對帶減旋片的平頭圓柱體的滾轉阻尼導數進行研究沒有涉及。在設計的初級階段采用試驗的方法費用昂貴,因此通過數值模擬的方法解算帶減旋片的滾轉彈體的流場,從而獲得較好精度的滾轉阻尼力矩系數導數就顯得非常必要。
1 模型及幾何參數
模型結構為平頭園柱體+4片矩形彈翼,具體如圖1所示,其模型參數見表1,其中L表示彈長,D表示彈徑,s表示彈翼展長,C表示彈翼弦長。

圖1 模型幾何尺寸簡圖Fig.1 Model geometry
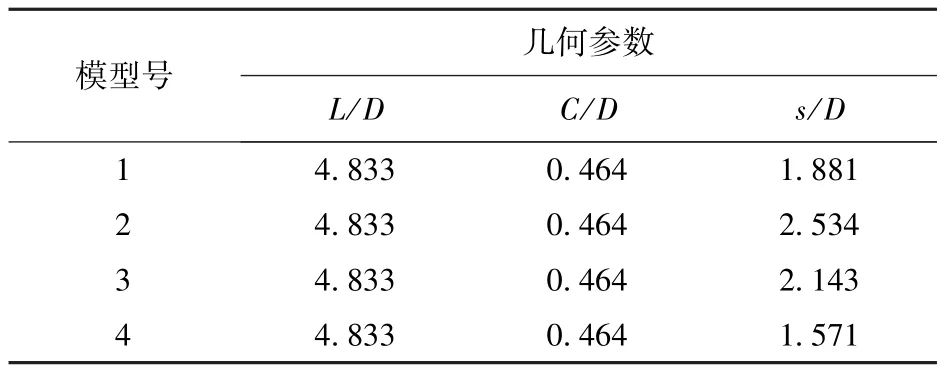
表1 模型參數Tab.1 Parameters of model
2 數值方法
2.1 計算方法
由于模型是旋轉的,為了將問題轉化為定常流動問題,計算中采用了旋轉坐標系,并將坐標系固定在旋轉模型上,從這個坐標系觀察模型是靜止的,而流場是轉動的,因此在旋轉坐標系下,方程中增加了離心力和科里奧利力的影響。
2.1.1 旋轉坐標系下的Navier-Stokes方程


SST湍流模型見CFX軟件有關說明。
文中使用計算流體力學軟件CFX進行數值計算。具體數值解算方法為:采用有限體積法離散控制方程,對流項采用基于有界性原理的高分辨率格式,湍流方程的離散格式為迎風格式,時間項采用隱式時間離散格式。由于模型是旋轉的,因此采用了動靜兩個計算域來處理,動域給定某一轉速繞轉軸旋轉,靜域為靜止的,動靜域之間的數據交換通過交界面進行,采用凍結轉子模型。
邊界條件:入口邊界采用來流速度和溫度;出口邊界采用靜壓和溫度;遠場邊界采用無粘滑移邊界墻;壁面邊界采用無滑移壁面條件,并設定壁面旋轉轉速為0 r/s.
2.1.2 滾轉阻尼導數計算公式

式中:(mx)ωx是由ωx引起的滾轉力矩系數;
2.2 計算網格
整個彈體網格分為內外兩個域,內域為旋轉域,外域為靜止域,內外域之間具有圓柱交接面,附面層計算網格采用三棱柱形,Y+小于50,外場采用四面體網格。入口距彈頭為8L,出口距彈底10L,側面外場距彈軸5D,如圖2所示。模型的表面網格和附面層網格如圖3和圖4所示。
2.3 計算條件
馬赫數Ma:0.4、0.5、0.6、0.7、0.8、0.9;攻角: 0°;轉速:50 r/s、100 r/s、180 r/s.
3 結果與討論
本次數值計算是通過對零攻角,3種轉速下平頭圓柱+4片矩形翼模型的滾轉力矩系數進行了解算,圖5為馬赫數Ma為0.4時滾轉力矩系數mx對無量綱滾轉角速度的變化曲線,從圖5可以看出,線性度很好,通過求解曲線斜率可以獲得滾轉阻尼導數值。圖6為滾轉阻尼導數的計算值和風洞試驗結果的對照曲線。為了驗證計算的正確性,采用自由滾轉技術,分別在風洞吹風狀態和不吹風狀態驅動模型旋轉達到某一轉速,然后脫開驅動裝置,測量轉速隨時間變化,并按照文獻[1]的方法計算獲得模型的滾轉阻尼力矩系數導數。試驗條件:馬赫數和攻角與計算相同;驅動裝置脫開時轉速: 60 r/s、110 r/s、190 r/s;試驗與計算模型尺寸相同。從圖6中可以看出滾轉阻尼導數的計算與試驗結果的變化趨勢非常一致,模型1和模型4計算值和試驗值較為接近,誤差為7%,模型3計算值與試驗值差11%,模型2計算值與試驗值差距稍大,接近17%,可能是翼片附面層網格較少,當翼片展長增加后,翼片稍部局部高壓區進一步增大,流場計算對這一高壓區捕捉不夠準確造成的,見圖4,同時試驗本身也存在誤差。從圖6中還可以看出,隨著馬赫數的增加,滾轉阻尼逐漸減小;隨著翼片展長的增加(次序為模型4、模型1、模型3、模型2),滾轉阻尼逐漸增大。從圖7可以看出,隨著無量綱展長s/D的增加,顯著增加,二者基本呈線性關系,不同馬赫數下均有類似結果。圖8為尾部截面的速度矢量圖,從圖中可以看出在模型繞自身軸線轉動時,翼片攪動了周圍的流場,附近的氣流也隨著彈體一起轉動,在臨近的翼片和彈體之間,存在著明顯的流渦,流速較低。

圖2 計算域示意圖Fig.2 Computing domain

圖3 表面網格及附面層網格Fig.3 Surface mesh and boundary layer mesh

圖4 翼片表面壓力分布Fig.4 Contours of static pressure on wings

圖5 滾轉力矩系數隨無量綱滾轉角速度的變化曲線Fig.5 Variation of rolling-moment coefficient withspin rate parameter

圖6 滾轉阻尼導數隨馬赫數的變化曲線Fig.6 Variation of roll-damping coefficientwith Mach number

圖7 展長對滾轉阻尼導數的影響Fig.7 Effect of span on roll-damping derivative

圖8 尾部截面速度矢量圖(從頭部看,Ma=0.9)Fig.8 Velocity vectors at the tail section(viewing from head,Ma=0.9)
從圖9左右翼對稱剖面的矢量圖可以看出,左翼的當地攻角為正,右翼的當地攻角為負,而且左右翼產生了大小相等,方向相反的附加升力,這是因為當彈體繞其縱軸轉動時,使彈翼的每一個剖面產生附加的垂直速度,對左、右翼來說該垂直速度大小相等,方向相反,每個翼上的垂直速度與來流速度合成一個速度矢量,而左右翼上的合成速度與彈軸的夾角正好相反,形成了方向相反的附加攻角,產生方向相反的附加升力;同時從圖10也可以看出,當零攻角時,由于模型旋轉,翼片的左面(沿左旋方向看)附近壓力較高,右面壓力較低,引起了翼片左右面附近形成壓力差,但對對稱模型零攻角時,如果沒有旋轉,彈翼左右面壓力應相同,不會產生這一壓力差。由于模型旋轉產生的這個壓力差會形成附加升力,而且彈體左右邊和上下邊彈翼的這一壓力差成對反向,因此翼片上的附加升力也成對反向,并且每個彈翼上的附加升力均與彈體滾轉方向相反,這就是滾轉阻尼力矩產生的緣由。圖11為翼片表面力的分布,翼片所受總力是與壓力差相關的,與圖12的翼片表面壓力分布一致。在實際的試驗中由于翼片較薄也遇到了翼片在高壓的翼梢三角區向滾轉方向相反的方向彎折的現象。

圖9 左右彈翼對稱截面速度矢量圖(Ma=0.9)Fig.9 Velocity vectors at symmertrical sections of left and right wings(Ma=0.9)

圖10 彈翼壓力云圖(從頭部看,Ma=0.9)Fig.10 Contour of static pressure on wings(viewing from head,Ma=0.9)

圖11 翼片表面力分布Fig.11 Distribution of force on wing surfaces
圖13和圖14分別為彈體表面流線圖及頭部和翼片流線圖,可以看出由于彈體的滾轉引起了表面流線的彎曲,也使頭部和翼片尾跡流線呈螺旋狀。圖15為彈體縱向截面馬赫數云圖,由于為平頭體,因此在頭部就出現了較大的流動分離,并且該分離流改變了翼片附近的流場,從尾跡看由滾轉引起的流動分離也較大。

圖12 彈體表面壓力云圖Fig.12 Contour of static pressure on body surface

圖13 模型表面流線圖Fig.13 Streamline of model surface

圖14 頭部和翼片流線圖Fig.14 Streamline of head and wings

圖15 彈體縱向截面馬赫數云圖(Ma=0.9)Fig.15 Contour of Mach number at the longitudinal section(Ma=0.9)
4 結論
本文通過數值計算研究了滾轉阻尼導數的計算方法,并通過與試驗結果對比分析得出如下結論:
1)本文采用的數值方法計算滾轉阻尼導數實用、可靠,與試驗結果一致性好。
2)隨著馬赫數的增加,滾轉阻尼逐漸減小。
3)隨著展長的增加,滾轉阻尼增大。
4)采用數值方法可以直觀地看出滾轉阻尼力矩產生的流動機理。
5)當翼片較薄時,可以采用此方法預估翼片彎曲的位置。
6)通過計算獲得的螺旋形尾跡,使研究者更進一步了解到滾轉運動對流場的影響。
(
)
[1] 丁則勝,劉亞飛,徐琴,等.彈體及減旋片滾轉阻尼實驗研究[J].彈道學報,2001,13(1):62-65. DING Ze-sheng,LIU Ya-fei,XU Qin,et al.Roll damping experimental study of body and anti-rotation flaps[J].Journal of Bollistics,2001,13(1):62-65.(in Chinese)
[2] 趙忠良,任斌.1.2 mm風洞大攻角動導數試驗技術[J].流體力學實驗與測量,1998,12(1):56-61. ZHAO Zhong-liang,REN Bin.High angle of attack dynamic derivatives experiment technique in 1.2 mm wind tunnel[J].Experiments and Measurements in Fluid Mechanics,1998,12(1):56-61.(in Chinese)
[3] 鄧帆,陳少松,陶鋼.帶柵格翼導彈超聲速階段滾轉阻尼導數的數值研究.[J].空氣動力學學報,2012,30(2):151-156. DENG Fan,CHEN Shao-song.TAO Gang.CFD analysis of roll damping derivatives for missile with grid fins at supersonic speeds[J].Acta Aerodynamica Sinica,2012,30(2):151-156.(in Chinese)
[4] Mechael A P,Lawrence L G.Steady-state computation of constant rotational rate dynamic stability derivatives,AIAA 2000-4321[R].Washington,DC:George Washington University,2000.
[5] Despirito J,Silton S I,Weinacht P.Navier-Stokes predictions of dynamic stability derivatives-evaluation of steady-state methods,ARL-TR-4605[R].Maryland,US:ARL,2008.
Roll Damping Simulation of Missile Body and Anti-rotation Flaps
ZHAO Yang-zheng,JIANG Sheng-ju,DANG Ming-li,ZHU Zhong-gen
(Xi'an Modern Control Technology Research Institute,Xi'an 710065,Shaanxi,China)
Roll damping derivative is an important aerodynamic parameter which affects the despinning effect of a missile.Steady CFD simulations are used to predict the roll damping characteristics of the missile with anti-rotation flaps at subsonic and transonic speeds.The predicted roll damping derivatives are in good agreement with the experimental data.The variation of the angle of attack and the surface pressure of wings due to rolling and the roll damping moment induced by additional wing lift are explained through numerical analysis.The bending location of the thin wings is shown.From the view of flow field,the influence of spinning on gas flow nearby the body of missile,the bending of surface streamline and the helical-like streamline pattern in the wake are demonstrated.
ordnance science and technology;roll damping derivative;missile body;anti-rotation flap;numerical simulation
V211.3
A
1000-1093(2015)07-1176-05
10.3969/j.issn.1000-1093.2015.07.004
2014-08-14
趙養正(1965—),男,高級工程師。E-mail:jie_lan2000@sina.com.cn
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19