適于LED 路燈的車載式道路照明檢測系統設計
2015-11-18 13:16:48秦大為
燈與照明 2015年1期
李 昊,秦大為
(1.常德市路燈維護管理處,湖南 常德 415000;2.鹽城師范學院實驗中心,江蘇 鹽城 224000)
0 引言
隨著國內LED 技術的快速發展,LED 也在道路照明上得到了廣泛的應用,用戶對LED 路燈的檢測要求也不僅僅滿足于平均照度、平均亮度、照度均勻度等光度學指標的測量,同時更關心LED 路燈的色溫和顯色指數等色度學指標的測量。但是,目前,在國內的道路照明行業中,均采用傳統的人工逐點測量方法,使用照度計和光譜儀來測量路燈照明系統的照度和色溫等數據。此方法存在檢測工作量大、檢測時間長的缺點,而且對已通車的道路來說進行測量還存在交通安全隱患。為此文章在常規的道路照明測量方法基礎上設計一種能同時實現光度學指標和色度學指標動態測量的車載式道路照明檢測系統,以適應對LED 路燈的檢測要求。
1 設計思想
由于傳統道路照明的照度、亮度、色溫、顯色指數等參數測量都采用人工逐點方法,測量人員工作量大,對已通車的道路進行測量不安全,測量效率低,本方案采用車載式計算機自動檢測系統,該系統由照度傳感器、光譜分析模塊傳感器、系統主機、計算機組成。
傳統的道路照明方法,人工記錄數據量大,易出錯誤。本方案采用計算機記錄、處理數據,包括歷史數據的調看,歷史資料的查找。
本系統將兩只相距1 m 的照度傳感器水平安裝于汽車的引擎蓋上,一只光譜傳感器水平安裝在車頂上(圖1)。當汽車以一定的速度勻速行駛,其光度學、色度學等數據通過RS-232 接口傳輸到計算機中,通過計算機軟件處理,立刻可得出路面的平均照度、照度均勻度、平均亮度、亮度均勻度、色溫和顯色指數等數據。
圖1 中,1 為汽車,2 為相距1 m 的兩只照度傳感器,3 為光譜傳感器。
圖2 為道路照明檢測系統的檢測系統圖。1 為照度傳感器,2 為光譜傳感器,3 為主機,4 為計算機。
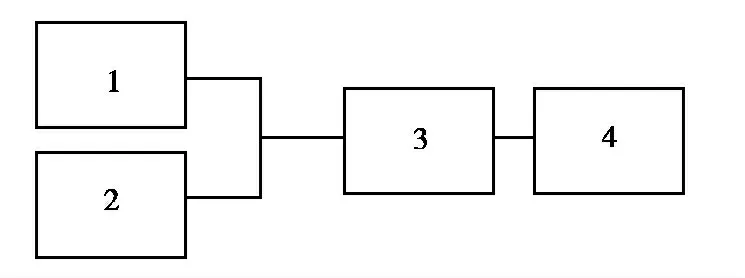
圖2 道路照明檢測系統的檢測系統圖
照度傳感器1 為硒光電池傳感器,固定在具有調平功能的磁性支架上。
光譜傳感器2 的結構原理圖如圖3 所示。
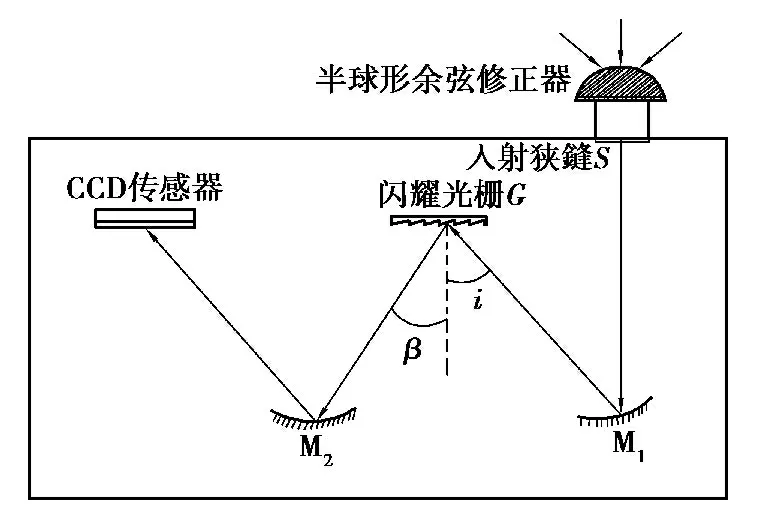
圖3 光譜傳感器檢測原理結構圖
圖3 所示為光譜傳感器檢測原理結構圖,根據實際需求,將其設計成動態檢測儀器,其檢測環境的照度較低,一般只有10~50 lx,且由于動態測量光源的入射角度在不斷變化,傳統光譜分析儀不能適應定期檢測需要。因此,對光譜傳感器的內部結構進行了光學結構優化設計,以滿足檢測需求。
亮度則根據照度×路面的反射系數獲得。路面的反射系數近似由標準照度計和標準亮度計對選取路面的三個點來進行測量,取其平均值。
2 設計技術方案
2.1 硬件
本系統的主機部分采用單片機作為控制中心,控制A/D 轉換和RS-232 通信。
系統的主機系統圖如圖4 所示。
圖4 中,1 為兩只照度傳感器和一只光譜傳感器,2 為運算放大模塊,3 為A/D 轉換模塊,4 為單片機控制模塊,5 為RS-232 通信模塊。
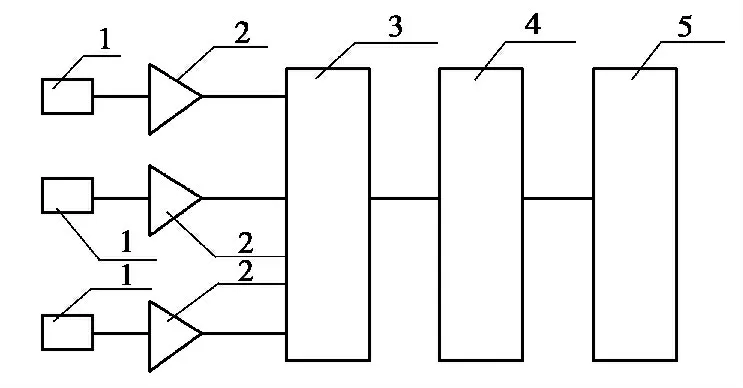
圖4 主機系統圖
三只傳感器采集外界的光信號將其轉換為電信號,傳輸給運算放大模塊,將信號放大到合適的范圍,并傳輸至A/D 轉換模塊,將模擬信號轉換為數字信號,然后將數據傳輸到單片機控制模塊,最后傳輸到RS-232 通信模塊,將數據傳輸到計算機。
此套系統是以單片機為核心,通過單片機來控制A/D 轉換模塊,提高了系統的可靠性,單片機采用了AT89S52 高性能單片機。
此外,為了提高產品的整體性和方便性,本系統還配備了高性能的筆記本電腦和GPS 定位系統,可以使測量人員隨時了解測試車所處的位置。
2.2 軟件
該系統軟件是在VB 環境下自主開發的應用軟件。軟件可將兩只照度傳感器采集的照度值求平均值,并計算出當前測量的路面照度平均值和照度均勻度,亮度平均值和均勻度,光譜傳感器獲得路燈的色溫和顯色指數。軟件還可以繪制出當前測量的路面適時照度和平均照度,適時亮度和平均亮度的曲線,方便、實用。單片機的部分C 語言程序如下:


此外,軟件加上了數據庫功能,可將每次測量的數據值保存在計算機中,方便隨時調看,也可將一條道路多個車道的數據全部疊加,計算出總的平均照度、照度均勻度、平均亮度和亮度均勻度。
該軟件還嵌合了GPS 衛星定位系統,可實現地圖操作、查詢、圖層控制等功能,方便測量人員了解目前所處的位置。

圖5
3 儀器主要設計技術參數
(1)照度的測量范圍:2~200 lx;
(2)照度測量的精度:±5%;
(3)亮度測量范圍:0.1~25 cd/m2;
(4)亮度測量的精度:±5%;
(5)照度、亮度均勻度測量范圍:0~1;
(6)取樣速度:10 次/秒;
(7)RS-232 傳輸速率:9 600 bps;
(8)汽車的行進速度:18~32 km/h;
(9)波長的測量范圍:380~760 nm (可見光);
(10)波長準確度:±0.5nm;
(11)色品坐標準確度:±0.000 5;
(12)色溫的測量范圍:1 500 K~25 000 K,分辨率:1 K;
(13)顯色指數的測量范圍:0~100;
(14)雜散光:<0.3%;
(15)光度通道線性:±0.3%;
(16)光譜分析模塊積分時間:10 ms~10 000 ms;
(17)計算機配置:聯想邵陽E46L,CPU:T3500,內存:2 G;
(18)工作環境溫度:-15~40 ℃;
(19)工作環境濕度:10%~70%RH;
(20)主機尺寸:370 (寬)mm × 173 (高)mm×360(深)mm。
4 小 結
CZXT-1 型車載式道路照明檢測系統已經成功地應用于重慶、石家莊、無錫、常德、鹽城等多家城市照明管理部門的道路照明測試。使用結果表明,系統設計合理、操作方便、快捷,大大減少了測量的時間,安全、準確、可靠。利用該系統也可對城市照明路燈現場的高壓鈉燈、金鹵燈、無極燈、節能燈等各種路燈光源的平均照度、平均亮度、照度均勻度、色溫、顯色指數、光譜波長、色品坐標等近10 項路燈光源光度學、色度學方面的主要技術參數進行現場動態檢測,為路燈光源光度學、色度學指標的現場動態測量提供了有效的技術設備支持。
[1]錢偉,秦大為,曹剛.車載式道路照明檢測系統[J].燈與照明,2010(3)
[2]原永志.淺析道路照明常見的幾個問題[J].城市照明,2009(1)
[3]郭志堅.城市道路照明設計淺談[J].中國科技信息,2009(1)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
