兩輪自平衡車實驗平臺的設計
2015-11-26 13:09:42王恒沈夢嬌
物聯網技術 2015年11期
關鍵詞:卡爾曼濾波
王恒++沈夢嬌


摘 要:兩輪自平衡小車具有重要的應用與理論研究意義。文中設計了兩輪自平衡小車的實驗平臺,系統分為5個模塊:電源管理模塊,微處理器模塊,電機驅動模塊,姿態傳感器數據采集模塊,以及藍牙無線通訊模塊。本設計從硬件電路,軟件設計對系統的5個模塊分別進行了詳細設計。最后,制作了兩輪自平衡小車的原型,并給予了初步運動控制驗證。該實驗平臺能夠初步實現自平衡功能,后續的研究將著重于對控制算法在該平臺的驗證研究。
關鍵詞:兩輪自平衡小車;數據融合;卡爾曼濾波;STM32
中圖分類號:TP242.3 文獻標識碼:A 文章編號:2095-1302(2015)11-00-04
0 引 言
兩輪自平衡小車(two-wheeled self-balanced vehicle)或兩輪自平衡機器人(two-wheeled self-balanced robot)是一種類似人類直立姿態的平衡控制系統,其核心問題是如何保證在各工況下運動姿態的平衡控制及導航[1]。兩輪自平衡小車或機器人系統是一個高階次、不穩定、多變量、非線性、強耦合的系統[2]。其系統設計不僅要考慮機械結構的運動學設計[3] ,也要考慮動力學設計[2]、能量設計[4]、控制系統的參數辨識、控制系統的濾波處理[5]等,然后建立相應的控制策略,設計確實可行的控制器[6],實現自平衡小車在各工況下的運動平衡控制。
兩輪自平衡小車在實踐應用上,可用于軍事領域中的偵查、排雷、單兵載人等,或作為日常生活中的短途交通工具[7]。然而,目前兩輪自平衡小車更多的是其理論研究的意義,它是檢驗各種控制理論控制性能的一個較好的實驗平臺[8]。目前國內不少院校都對兩輪自平衡小車進行了研究,主要為哈爾濱工業大學趙杰團隊[8],西安電子科技大學屈勝利團隊[9],北京工業大學阮曉剛團隊[1, 2]等。國外也對兩輪自平衡小車有研究,如Sayidmarie[10]等對兩輪自平衡機器人上坡的平衡控制進行了研究,Slavov[11]等人基于線性二次型控制(linear-quadratic regulator, LQR)對兩輪機器人進行了研究,Larimi[12]等構建了反作用輪系輔助的兩輪小車的新型的穩定算法,Kim[13]等建立了兩輪自平衡移動機器人的動態模型等。這說明兩輪自平衡小車不僅僅在應用需求上,尤其在學科理論需求上,對其研究都具有重要的意義。因此,作為進行各種平衡控制理論研究的第一步,對兩輪自平衡小車的實驗平臺的研制具有非常重要的意義。
本文主要設計了兩輪自平衡小車的實驗平臺。設計采用STM32F103C8T6為核心處理器進行控制,姿態檢測選用MPU6050運動處理傳感器,數據融合采用卡爾曼濾波算法,結合陀螺儀的快速響應特性和加速度傳感器的長時間穩定特性,得到小車的傾角。然后通過PID算法使小車能夠處在一個相對平衡的位置,從而保持直立的姿態。系統控制參數的選擇采用系統辨識的方法,在Matlab仿真平臺得到系統的優化參數,并寫入編寫好的C語言軟件,通過HC-06藍牙模塊可以使用Android手機控制小車實現前進、后退、左轉、右轉等動作模式。
1 系統設計
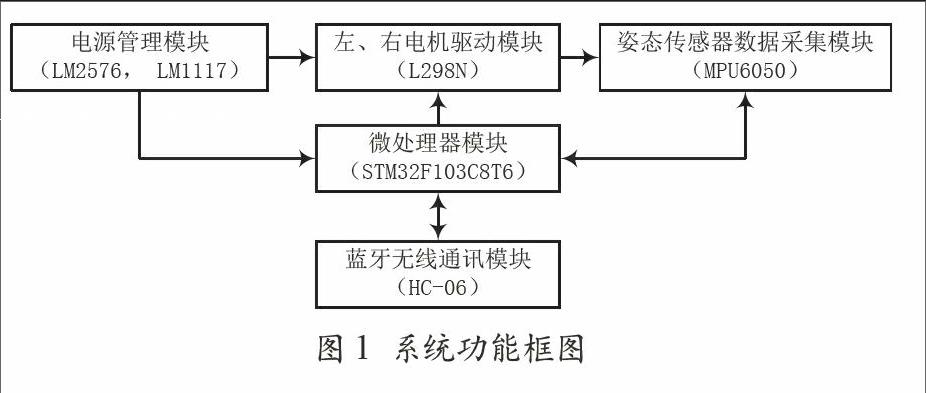
本設計采用模塊化設計思想,系統總體功能框圖如圖1所示,分為五個模塊,分別為:電源管理模塊,微處理器模塊,電機驅動模塊,姿態傳感器數據采集模塊,以及藍牙無線通訊模塊。電源管理模塊負責整個系統的供電,微處理器模塊為系統的控制與數據處理核心,姿態數據采集模塊為采集小車的姿態(包括加速度和角速度),然后通過微處理器控制算法后,再驅動電機控制模塊運動以保持平衡,而藍牙通訊模塊則通過手機設備控制系統的運行,同時,系統運行的數據也可以上傳到手機或電腦上。
圖1 系統功能框圖
2 硬件電路設計
2.1 電源管理模塊
系統主要使用的電平為12 V,5 V,3.3 V共三種電平,其中STM32F103C8T6、MPU6050、HC-06主要采用3.3 V供電,電機驅動模塊用12 V和5 V供電。所以,本設計總電源使用12 V的鋰電池供電,采用LM2576將鋰電池進行降壓為5 V,再利用LM1117把得到的5V電平降為3.3 V。
2.2 STM32F103微處理器模塊
系統采用STM32F103C8T6意法半導體(ST)的32位ARM Cortex-M3 內核的微處理器。該處理器正常工作主頻為72 MHz,具有12 bit 分辨率的ADC,以及16 bit 電機控制PWM定時器,2個I2C接口(SMBus/PMBus)。該處理器可應用于電機驅動,應用控制,醫療手持設備,游戲,GPS平臺等多種場合,所以,本設計采用STM32F103C8T6具有一定的合理性。其最小系統電路圖如圖2所示。
2.3 電機驅動模塊
自平衡小車的驅動電機為兩個無刷直流電機(電機A為左側電機,電機B為右側電機)。采用L298N芯片作為電機驅動電路的主芯片,小車的不同狀態運動通過電機的三種轉動方式(正轉,反轉,停止)實現,具體如表1所列。電機驅動電路原理圖如圖3所示。L298N的VSS接5 V電源,VS接12 V電源。IN1、IN2、IN3、IN4分別接STM32的PB1、PB0、PB6和PB5,ENA接PA0,ENB接PA1,此接法不是唯一的,可以根據程序中的端口設置進行相應的更改。具體的控制過程:角速度和加速度經過閉環控制之后產生一個結果,其運算結果用來改變PWM脈沖的占空比,進而分別控制了左電機和右電機的轉速。在兩個電機之間加入二極管主要是為了保護電路的安全運行。
表1 引腳狀態電機制動電機A IN1 IN2 電機B IN3 IN4
正轉 1 0 正轉 1 0
反轉 0 1 反轉 0 1
停止 0 0 停止 0 0
—— 1 1 —— 1 1
2.4 姿態傳感器模塊
為了得到高精度的角度檢測,系統采用Invensense 公司的MPU6050,該姿態傳感器同時集成了3軸加速度和3軸陀螺儀,自帶16位AD轉換,加速度測量范圍為±16 g(實際應用僅為±2 g范圍),傾角角度測量范圍不到1度。所以不需要分別使用加速度計和陀螺儀,以及相應的ADC電路,但此處數據不能簡單采集使用,還需要經過微處理器卡爾曼濾波融合算法才可得到傾角。姿態傳感器模塊電路如圖4所示。
2.5 藍牙無線通訊模塊
自平衡小車系統可以通過無線方式和上位機或者手機進行通訊,實現手機控制小車運行,并同時把數據上傳到手機上。本設計采用的是藍牙模塊HC-06,此模塊波特率可變,串口電壓為3.3 V或者5 V,可以進行主從機切換,并且可以通過AT指令改變一些出廠的基本設置,如名字和密碼等。HC-06主要用來接收安卓手機發送的指令,接收到之后,把指令通過串口發送給主控芯片,再由單片機控制電機,根據不同的指令來實現小車的左轉、右轉、前進和后退。HC-06原理圖如圖5所示。
圖3 電機驅動電路
圖4 MPU6050電路原理圖
3 系統軟件設計
系統的控制流程圖如圖6所示,主要包括:STM32的初始化,MPU6050初始化,姿態(傾角)信息的采集,卡爾曼濾波,傾角PID控制,PWM控制電機輸出。系統軟件開發為基于CMSIS架構的固件庫開發平臺,軟件版本為MDK V4.12,它支持常見的ARM7,ARM9和ARM最新內核的CM3系列微處理器。
圖6 系統控制流程圖
STM32的初始化主要包括時鐘初始化、延時初始化以及中斷初始化。時鐘初始化采用SystemInit()。STM32是CM3內核的,所以其內部有一個SysTick定時器,而使用的延時函數就是以這個定時器為基準,delay_init()函數主要是配置SysTick的中斷時間,以及延時初始化fac_us和fac_ms兩個參數。NVIC_Configuration()函數主要用來設置搶占優先級和響應優先級。
MPU6050要根據裝配位置,通過I2C讀取各個軸角速度和各個軸的加速度,再進行卡爾曼濾波處理進行數據融合,然后得到融合后的傾角。數據讀取函數、卡爾曼濾波函數分別為IIC_6050()、Kalman()。濾波器參數通過模型仿真與實驗結合的方式得到。并寫入到軟件代碼中。
電機控制可采用方波或正弦波控制。雖然正弦波相比有效率的多,但考慮到系統實現的復雜度和效率,本文采用方波來實現電機控制。設計采用TIM2的通道一和通道二產生PWM波輸出,使用TIM2并設置其為定時器模式,脈沖寬度調制模式2,通過代碼產生頻率為18 kHz占空比可變的PWM,其中占空比由獲取到的角速度和角度來控制,使用函數TIM_SetCompare()來驅動電機。
本設計的手機顯示界面如圖7所示。設計沒有使用查詢而是使用中斷接收指令,因此中斷服務函數是整個串口模塊的核心。當收到不同的指令時,通過控制電機轉向進行不同的操作。需要注意的是每次控制電機之后都要調用一個清除緩沖區的函數,否則緩沖區的指令會保持不變,只能保持一個狀態。串口不斷接收從藍牙傳過來的指令,串口接收到的指令都是由Android程序控制的。程序分為兩個部分,一個是XML文件,XML是布局文件,對此文件進行修改可以改變手機顯示的界面,設計使用Button控件。另外一個是Java文件,真正的行為控制是Java文件來做的,首先要實例化Button,然后定義藍牙地址變量,使之固定不變。本設計藍牙設備的地址為00:21:13:07:BC,找到地址之后就要發送指令,這些指令都是由一些藍牙架包實現的,最后把message發送出去。本設計中若message指令為G,則向前,若為B則后退,S為停止,L為左轉,R為右轉。
圖7 手機界面
4 自平衡小車原型實物
本設計采用兩個無刷直流電機控制,選擇飛思卡爾競賽使用的C型車模進行改裝得到小車機械結構,底盤使用一塊面包板來代替,板子和支架部分固定在一起。小車的傾角傳感器MPU6050,電機控制模塊L298,鋰電池模塊,降壓模塊,STM32核心板,藍牙模塊等都安裝在面包板上面。完整車體如圖8所示。通過手機控制界面,可以遙控兩輪自平衡小車的運動,同時可以把采集數據上傳到手機上。
圖8 自平衡小車原型
5 結 語
本文對兩輪自平衡小車實驗平臺進行了設計,作為較為理想的驗證各種控制理論的實驗平臺,進行了系統的硬件平臺設計、軟件平臺設計以及機械平臺設計。系統主要以STM32F103 32 位 ARM控制器為核心,采用卡爾曼融合濾波算法對MPU6050姿態傳感器進行數據處理,通過PWM控制左、右電機的運動,該系統能夠初步實現小車的運動平衡控制。后期的研究將著重理論控制算法的仿真,與參數融合優化方面。
參考文獻
[1] 阮曉鋼, 趙建偉. 基于Hopfield網絡的柔性兩輪自平衡機器人控制 [J]. 機器人, 2010, 32(3): 405-413.
[2] 阮曉鋼, 任紅格. 兩輪自平衡機器人動力學建模及其平衡控制 [J]. 計算機應用研究, 2009, 26(1): 99-101.
[3] 彭楠. 兩輪自平衡電動車機械結構設計與有限元分析 [D]. 鄭州:鄭州大學, 2010.
[4] 王曉宇, 閆繼宏, 秦勇, 等. 基于改進遺傳算法的兩輪自平衡機器人能量優化策略 [J]. 吉林大學學報(工學版), 2009(3): 830-835.
[5] 劉二林, 姜香菊. 基于卡爾曼濾波的兩輪自平衡車姿態檢測 [J]. 自動化與儀器儀表, 2015 (2): 52-54.
[6] 陳波. 基于神經網絡PID控制的兩輪自平衡小車研究 [D].成都:西南交通大學, 2014.
[7] 王曉宇. 兩輪自平衡機器人的研究 [D].哈爾濱:哈爾濱工業大學, 2007.
[8] 秦勇, 閆繼宏, 王曉宇, 等. 兩輪自平衡機器人運動控制研究 [J]. 哈爾濱工業大學學報, 2008 (5): 721-726.
[9] 程剛, 屈勝利, 劉學超. 兩輪自平衡小車可控角度的推導研究 [J]. 機床與液壓, 2009,37(5): 115-116.
[10] Sayidmarie O K, Agouri S A, Tokhi M O. Balancing and Control of a Two-Wheeled Robot on Inclined Surface [Z]. Mobile Service Robotics, 2014.
[11] Slavov T, Kralev J, Petkov P. Linear-Quadratic Control of a Two-Wheeled Robot [J]. Cr Acad Bulg Sci, 2014, 67(8): 1153-1158.
[12] Larimi S R, Zarafshan P, Moosavian SAA. A New Stabilization Algorithm for a Two-Wheeled Mobile Robot Aided by Reaction Wheel [J]. J Dyn Syst-T Asme, 2015, 137.
[13] Kim S, Kwon S. Dynamic Modeling of a Two-wheeled Inverted Pendulum Balancing Mobile Robot [J]. Int J Control Autom, 2015, 13(4): 926-933.
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
