新一代天氣雷達伺服系統(tǒng)電機測速機信號檢測技術(shù)
2015-12-02 02:28:36張福貴楊蘇勤
成都信息工程大學(xué)學(xué)報 2015年5期
張福貴, 舒 毅, 張 雙, 任 雍, 楊蘇勤
(1.成都信息工程大學(xué)電子工程學(xué)院,四川成都610225;2.福建省泉州市氣象局,福建泉州362000;3.福建省大氣探測技術(shù)保障中心,福建福州350000)
新一代天氣雷達(CINRAD/SA)是探測能力較好的一種災(zāi)害性天氣探測和預(yù)警工具,現(xiàn)有CINRAD/SA雷達中天線/伺服系統(tǒng)使用的分類電機有直流電機和交流電機,直流電機包括進口和國產(chǎn)兩種。國產(chǎn)伺服電機目前已經(jīng)改進且在國內(nèi)多個新一代天氣雷達的伺服系統(tǒng)中投入使用,從使用情況來看,技術(shù)性能和可靠性均達到了預(yù)期的目標(biāo)。后期生產(chǎn)的CINRAD/SA雷達對伺服系統(tǒng)進行了技術(shù)改進,采用了交流電機,提高了伺服系統(tǒng)運行的可靠性、可維護性,滿足了天氣雷達系統(tǒng)的高動態(tài)響應(yīng)需求。何建新、潘新民、周紅根、楊傳鳳等[1-5]對雷達天線/伺服系統(tǒng)原理和系統(tǒng)特殊故障處理進行了介紹和總結(jié);蔡勤、舒毅、李明元、胡東明等[6-9]分別對雷達閃碼、軸角箱、控制序列超時以及伺服系統(tǒng)方位典型故障進行了分析和處理。而本文運用實際的雷達/天線伺服系統(tǒng)的電機故障案例歸納總結(jié)了雷達天線/伺服電機測速機信號檢測技術(shù)方法,此類方法可通過測量點和調(diào)整參數(shù)適用于目前中國布網(wǎng)的168部新一代天氣雷達的天線/伺服系統(tǒng)的交/直流電機系統(tǒng)的信號檢測和相關(guān)的故障排查,同類型相關(guān)天氣雷達也可以參考本文的關(guān)鍵參數(shù)測量和調(diào)整方法,均可借鑒,可為新一代天氣雷達伺服系統(tǒng)的交、直流電機測速機故障的現(xiàn)場維護、維修提供幫助和借鑒。
1 測速機信號的傳輸流程
1.1 直流伺服系統(tǒng)測速機
天線/伺服系統(tǒng)的直流電機測速機信號由電機自身的測速機生成,俯仰系統(tǒng)電機測速機信號通過滑環(huán)系統(tǒng)傳輸并與方位電機測速機信號一起通過軸角盒傳輸?shù)教炀€座里面的上光端機設(shè)備中,在上光端機設(shè)備中俯仰電機和方位電機的測速機信號通過專用光纖系統(tǒng)的變換傳輸和重建傳輸至接收機系統(tǒng)的RDA機柜,然后通過DAU數(shù)據(jù)采集單元的轉(zhuǎn)接進入DCU數(shù)據(jù)控制單元。在DCU數(shù)據(jù)控制單元內(nèi),信號反饋到天線/伺服系統(tǒng)的模擬板上進行天線位置的閉環(huán)控制,同時也被反饋到天線/伺服系統(tǒng)數(shù)字板上的A/D數(shù)據(jù)采樣單元。如圖1直流電機系統(tǒng)測速機信號傳輸流程。

圖1 直流電機系統(tǒng)測速機信號傳輸流程
1.2 交流伺服系統(tǒng)測速機
交流系統(tǒng)電機也是自帶測速機,俯仰和方位電機產(chǎn)生的測速機信號經(jīng)由各自的電機信號線纜反饋至交流功放單元,然后經(jīng)過天線/伺服交流系統(tǒng)功放單元的變換,信號進入DCU數(shù)據(jù)控制單元,在數(shù)據(jù)控制單元DCU內(nèi)電機信號被反饋到天線/伺服控制系統(tǒng)的模擬板上進行位置閉環(huán)控制,同時也傳輸?shù)教炀€/伺服系統(tǒng)數(shù)字板上A/D采樣。圖2為交流電機系統(tǒng)測速機信號傳輸流程。

圖2 交流電機系統(tǒng)測速機信號傳輸流程
2 測速機信號的幅度比例
2.1 直流伺服系統(tǒng)
CINRAD/SA雷達天線最大轉(zhuǎn)速為±36度/秒,直流電機測速機的對應(yīng)輸出為±39 V,深圳、寧波、連云港雷達站的實測結(jié)果與此吻合,根據(jù)所使用的進口直流電機手冊,對應(yīng)輸出應(yīng)為±36.1 V,武漢雷達站的實測結(jié)果與此手冊吻合,而九江雷達站的實測結(jié)果與此相比則明顯偏小,由于進口直流電機手冊標(biāo)明輸出紋波可達10%,若以紋波為誤差幅度,則九江雷達站實測結(jié)果仍在此誤差范圍內(nèi)。該測速機信號在上光纖板經(jīng)過A/D變換成為數(shù)字量,經(jīng)過光纖傳輸,在下光纖板上通過D/A轉(zhuǎn)換重建為模擬量,信號幅度與測速機的原輸出信號相同。
2.2 交流伺服系統(tǒng)
CINRAD/SA雷達升級使用的交流電機測速機輸出為三相交流信號,它通過電機反饋線纜進入交流功放單元后,被功放模塊變?yōu)樯芍绷餍盘枴y速機輸出的交流信號的相位和幅度等信息,電機說明書中未見,但據(jù)交流功放模塊資料,其所變生的速度信號輸出范圍是±10 V,據(jù)此推論,雷達天線最大轉(zhuǎn)速為±36度/秒時,功放傳輸?shù)紻CU的電機速度信號為±10 V(實測稍有偏大)。
3 天線的方位和俯仰速度理論值
CINRAD/SA雷達天線運轉(zhuǎn)時方位和俯仰的速度理論值,對于使用直流伺服系統(tǒng)和交流伺服系統(tǒng)的新一代天氣雷達是相同的。
3.1 方位速度
雷達天線進行體掃時,在不同的仰角其方位的理論轉(zhuǎn)速是不相同的,見表1雷達體掃在不同仰角的方位理論速度。
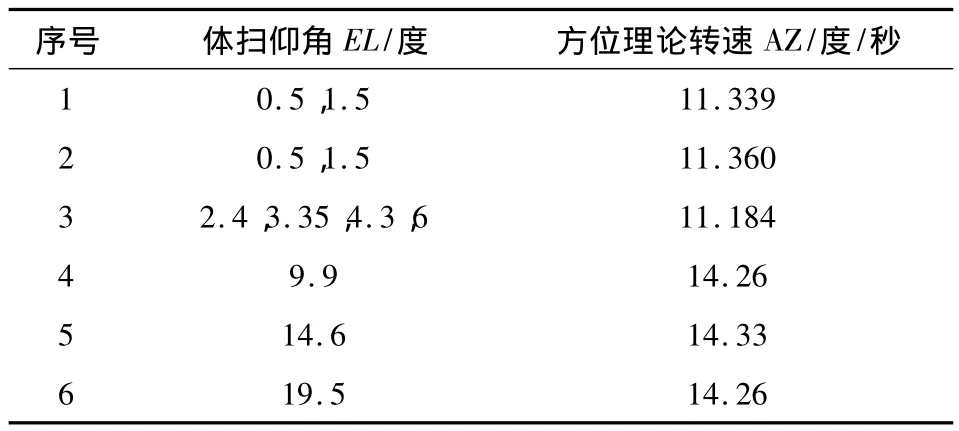
表1 雷達體掃在不同仰角的方位理論速度
據(jù)前文所述的電機測速機幅度比例和本節(jié)的天線理論轉(zhuǎn)速,可以推算出天線體掃時,在各仰角的測速機信號的額定值,但實測與之有偏差。源于電機測速機輸出的紋波較大,造成偏差。對于直流伺服系統(tǒng)而言,該偏差可能是由光纖系統(tǒng)對該信號進行轉(zhuǎn)換與重建時造成。對于交流伺服系統(tǒng)而言,該誤差則可能來源于功放模塊對電機測速機傳來的交流信號的變生過程。
3.2 俯仰速度
對CINRAD/SA天氣雷達天線/伺服系統(tǒng)由于俯仰與方位控制策略不同,雷達天線的俯仰方向在變換角度控制時采用DOUBLET策略:第一階段用最大控制速度從起始位置角度轉(zhuǎn)向目標(biāo)位置角度,第二階段以反向最大速度控制實現(xiàn)天線的目標(biāo)位置制動,第三階段進行天線位置閉環(huán)控制,控制天線停留在目標(biāo)位置角度。
前兩個階段各自維持的時間隨著俯仰方向運動的角度距離變化,各自的維持時間也不同,值得注意的是,很多情況下第二階段時間為0。俯仰方向測速信號的在仰角變化時的波形可參見后文。
4 測速機信號的檢測點
CINRAD/SA雷達伺服系統(tǒng)中對于反饋回來的測速機的測速信號,最方便的測量點位于DCU的數(shù)字板上,為描述空間方向,測量時請面對DCU數(shù)字板的長邊,并站在有電源接口的一側(cè)。見表2測速信號檢測點,以敏視達交流伺服DCU數(shù)字板實物為例,見圖3交流伺服DCU數(shù)字板測速機信號檢測點[10-11]。

表2 測速信號檢測點

圖3 交流伺服DCU數(shù)字板測速機信號檢測點
5 電機測速機故障實例
5.1 直流伺服系統(tǒng),方位電機測速機故障
根據(jù)技術(shù)資料,當(dāng)方位電機運轉(zhuǎn)速度達到10度/秒時,方位電機的測速機反饋信號值為:(39 V/36度/每秒)*10度/每秒=10.8 V,使用軟件進行測試,深圳,寧波,連云港臺站雷達實測結(jié)果與此相符,深圳雷達該信號波動幅度100 mV左右,寧波雷達波動可達300~400 mV,而連云港相比最佳,波動為60 mV左右。
由于進口直流電機手冊換算有所不同,電機與天線之間有大約316∶1的減速比,則天線最大轉(zhuǎn)速36度/秒對應(yīng)電機轉(zhuǎn)速1900轉(zhuǎn)/分鐘,而該手冊標(biāo)注,測速信號為19 V/每分鐘1000轉(zhuǎn),則1900轉(zhuǎn)/分鐘;即天線36度/秒對應(yīng)36.1 V。以此換算10度/秒對應(yīng)10 V左右,天線進行體掃時在0.5度仰角轉(zhuǎn)第一圈時方位速度為11.339度/秒,則對應(yīng)方位測速信號應(yīng)為11.35 V左右,武漢雷達的實測結(jié)果與此相符,使用軟件測試,武漢雷達方位速度為10度/秒時,速度反饋信號為10.113~10.166 V,體掃0.5度第一圈時,方位速度反饋為11.484~11.532 V。而九江雷達則量值明顯偏小,體掃0.5度第一圈時,方位速度反饋最小為9.9 V,如以測速機輸出±10%的紋波為誤差范圍,則此值可視為處于允許誤差的下界,以上都是正常運行的CINRAD/SA直流伺服系統(tǒng)雷達天線方位電機測速信號的情況。
連云港天氣雷達在2010年2月發(fā)生天線/伺服系統(tǒng)故障報警導(dǎo)致雷達停機,用軟件測試發(fā)現(xiàn),當(dāng)方位電機測速機的速度控制命令為10度/秒時,經(jīng)檢查方位測速機的測速信號幅度僅僅為4~6 V,幅度偏小,波形擾動大,即可定位為天線/伺服系統(tǒng)的方位電機故障,更換方位電機后雷達故障修復(fù),故障報警消除,雷達正常運轉(zhuǎn)。經(jīng)仔細(xì)檢查更換下來的故障方位電機后確認(rèn)方位電機損壞原因是漏油滲入到電機里面,直接導(dǎo)致方位電機損壞。
5.2 直流伺服系統(tǒng),俯仰電機測速機故障
2010年6月24日,南昌雷達站俯仰電機開始發(fā)生故障,其后故障頻率迅速增加,到27日徹底損壞,經(jīng)過檢查損壞前后的俯仰電機測速機的信號波形輸出明顯異常。雷達天線/伺服系統(tǒng)電機測速機徹底損壞前其運行狀態(tài)為:俯仰仰角從14.6°抬升到19.5°時,天線會過沖到30°,然后再沖回負(fù)仰角角度,這要操作5~6個來回才能將天線控制定位到目標(biāo)位置19.5°,而其余大多數(shù)時候天線運行狀態(tài)表現(xiàn)正常,其現(xiàn)象輸出屬于偶發(fā)故障,此時用示波器觀察到的俯仰電機測速機的測速信號波形如圖4俯仰電機測速機信號正常輸出波形,測試方法為:使用雷達控制軟件控制天線進行俯仰3度/秒的定速掃描,可發(fā)現(xiàn)雷達天線的俯仰運行現(xiàn)象是做往、復(fù)運動的正向加、減速運行以及反向加、減速運行過程。

圖4 俯仰電機測速機信號正常輸出波形
俯仰電機損壞后,測速機信號輸出極小,導(dǎo)致速度環(huán)接近開環(huán),前述的偶發(fā)故障現(xiàn)象成為必然現(xiàn)象。俯仰測速機損壞后的輸出波形,如圖5俯仰電機測速機信號輸出異常波形,測試方法為:使用軟件進行多次體掃或則多次泊位現(xiàn)象為:雷達天線在俯仰仰角30°和負(fù)角度之間來回往復(fù)運行,雷達天線失控,只能通過關(guān)閉伺服強電結(jié)束其運行。沖擊運行時樓體震動感覺明顯,雷達天線的俯仰運動控制速度至少在±15°/秒左右,但俯仰測速機的反饋信號幅值絕大多數(shù)時候只有±(1~2 V)左右,偶有±(3~5 V),幅值偏小。即可定位為俯仰測電機速機損壞,更換俯仰電機后雷達恢復(fù)正常,損壞的直接原因應(yīng)是電機接近工作壽命且維護不佳。

圖5 俯仰電機測速機信號輸出異常波形
5.3 交流伺服系統(tǒng),方位及俯仰電機測速機故障
自2010年4月開始,秦皇島雷達天線仰角下降時,會偶發(fā)樓體明顯震動。而后頻率不斷增加,7月4日中午,在每次仰角下降時,樓體都有明顯震動,不久方位電機和俯仰電機徹底損壞。仰角不動僅方位轉(zhuǎn)動時樓體也有明顯震動,并且半分鐘后,方位開始在約+/-100度之間來回擺動,而后體掃自動終止,雷達停機,以上現(xiàn)象都在方位測速機信號上有所對應(yīng),見圖6天線仰角抬升時方位、俯仰測速機信號異常波形;其中黃色波形為方位測速機信號,藍色波形為俯仰測速機信號。
在方位電機損壞前,雷達雖然能維持基本運轉(zhuǎn),但從測速機輸出信號可見,方位測速機輸出擾動過大,仰角從6度抬升到9.9度時,方位速度應(yīng)從11.184度/秒增大到18.88度/秒,方位速度增大時,方位測速機輸出擾動很大。

圖6 天線仰角抬升時方位、俯仰測速機信號異常波形

圖7 天線仰角下降時方位、俯仰測速機信號異常波形
天線仰角下降時方位、俯仰測速電機信號異常波形如圖7所示,在方位電機徹底損壞之前,仰角從19.5度下降到0.5度時,方位速度從19.06度/秒減小到11.339度/秒。可見,方位速度減小時,方位測速機輸出擾動更大,且超調(diào)明顯,此時樓體震感明顯,由于擾動過大的速度反饋信號作用于伺服控制系統(tǒng),引起了方位速度調(diào)節(jié)的振顫,因諧振效應(yīng)導(dǎo)致了樓體震動。
而后方位電機測速機徹底損壞,一開始表現(xiàn)為體掃仍在繼續(xù)、方位仍在轉(zhuǎn)動,但方位測速信號為0,此時雖然仰角不動,只有方位在轉(zhuǎn),但樓體同樣明顯震動,不久后,方位測速機信號間歇性出現(xiàn),只在0值和±(6~10)V以上的大值之間交替閃現(xiàn),圖8(a)、(b)方位測速機輸出間歇性異常信號表現(xiàn)出的就是這種情況,此時,方位在+/-100度之間來回擺動,不久體掃自動停止,雷達停機。

圖8 方位測速機輸出間歇性異常信號
在方位電機測速機徹底損壞后,用軟件進入天線手動控制界面,在尚未發(fā)出任何命令時,方位自行轉(zhuǎn)動,并且其測速反饋為0。判斷為方位電機損壞后,更換方位電機,方位變速時方位測速信號的擾動消失,樓體震動再未發(fā)生。但僅更換方位電機時,使用軟件測試,天線動作仍會出現(xiàn)偶爾不響應(yīng)伺服系統(tǒng)的動態(tài)控制命令,或在不發(fā)命令時方位自行旋轉(zhuǎn)且DCU內(nèi)得到的方位測速信號為0的現(xiàn)象,這里判斷故障為功放在帶動已損壞的電機工作時被燒損,更換功放后問題徹底解決。
雷達修復(fù)后,仰角從6度抬升到9.9度時,方位速度從11.184度/秒增大到18.88度/秒,天線運行正常,此時方位和俯仰測速機正常信號的波形見圖9天線仰角抬升時方位、俯仰測速機正常信號波形。

圖9 天線仰角抬升時方位、俯仰測速機正常信號波形
圖10天線仰角下降時方位、俯仰測速機正常信號波形。雷達故障修復(fù),仰角從19.5度下降到0.5度時,方位速度從19.06度/秒減小到11.339度/秒。由圖10可見,方位速度減小時,方位測速機輸出平滑、無超調(diào),天線運行平穩(wěn),樓體無感。

圖10 天線仰角下降時方位、俯仰測速機正常信號波形
6 結(jié)束語
通過對新一代天氣雷達(CINRAD/SA)交、直流伺服系統(tǒng)電機測速機信號的檢測技術(shù)方法的總結(jié),以及故障案例的歸納,有利于通過測量點和調(diào)整參數(shù)快速、高效的解決此類故障,從而為此型號相關(guān)雷達伺服系統(tǒng)的實時技術(shù)支持提供參考,從而大大提高對天氣雷達的保障能力和設(shè)備可靠性[12-16]。
[1] 何建新.新一代天氣雷達原理與系統(tǒng)[M].西安:電子科技大學(xué)出版社,2004.
[2] 潘新民,柴秀梅,崔炳儉,等.CINRAD/SB雷達伺服上電故障診斷分析[J].氣象科技,2011,39(2):212-216.
[3] 潘新民,王全周.CINRAD/SA數(shù)字交流伺服系統(tǒng)調(diào)試和維修方法[J].氣象科技,2013,41(5):825-831.
[4] 楊傳鳳,袁希強,景東俠,等.CINRAD/SA雷達天伺系統(tǒng)疑難故障原因剖析[J].氣象科技,2009,37(4):439-443.
[5] 周紅根,周向軍,祁欣,等.CINRAD/SA天氣雷達伺服系統(tǒng)特殊故障分析[J].氣象,2007,33(2):98-101.
[6] 蔡勤,柴秀梅,周紅根,等.CINRAD/SA雷達閃碼故障的診斷分析[J].氣象,2011,37(8):1045-1048.
[7] 胡東明,劉強,程元慧,等.CINRAD/SA天線伺服系統(tǒng)軸角箱多次故障的分析[J].氣象,2007,33(10):114-117.
[8] 李明元,陳明林,左經(jīng)純,等.新一代多普勒天氣雷達(CINRAD/CD)方位伺服系統(tǒng)典型故障分析及處理[J].氣象,2012,38(1):123-128.
[9] 舒毅,楊蘇勤,舒童,等.CINRAD/SA雷達控制序列超時故障分析[J].氣象科技,2012,40(6):896-901.
[10] 舒毅.示波器在雷達維護維修中的幾點應(yīng)用[J].氣象水文海洋儀器,2012,29(2).
[11] 中國新一代多普勒天氣雷達 CINRAD/SA WSR-98D技術(shù)手冊[M].北京:北京敏視達雷達有限公司,2000.
[12] 陳寶,高仲輝,郝立勇,等.機場多普勒天氣雷達雙機備份技術(shù)及可靠性分析[J].成都信息工程學(xué)院學(xué)報,2012,27(3):247-252.
[13] 甘兵,朱毅,王紅艷,等.基于事件通知服務(wù)的雷達產(chǎn)品生成系統(tǒng)的數(shù)據(jù)分發(fā)改進[J].成都信息工程學(xué)院學(xué)報,2012,27(3):253-258.
[14] 盧會國,康立寧,李丹.基于關(guān)聯(lián)規(guī)則的故障診斷方法研究[J].成都信息工程學(xué)院學(xué)報,2014,29(4):329-335.
[15] 陳松,佘勇,姚振東,等.永磁同步交流伺服系統(tǒng)在小型天氣雷達中的應(yīng)用[J].成都信息工程學(xué)院學(xué)報,2014,29(2):150-153.
[16] 劉娟,鄭偉,謝鍵,等.CINRAD/SC天氣雷達發(fā)射機故障綜合分析與檢修[J].成都信息工程學(xué)院學(xué)報,2011,26(1):86-90.
猜你喜歡
科教新報(2022年12期)2022-05-23 06:34:16
今日農(nóng)業(yè)(2021年14期)2021-10-14 08:35:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
海峽姐妹(2020年8期)2020-08-25 09:30:18
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50