動態力傳感器校準實例——動態信號的采集與分析
2015-12-02 03:08:24趙靜
計測技術 2015年1期
趙靜
(中航工業北京長城計量測試技術研究所,北京100095)
0 引言
力可以分為靜態力和動態力。相應的,力傳感器也有兩方面的特性,即靜態特性和動態特性。靜態特性一般是指傳感器對于固定力值的一種響應,動態特性是指傳感器對于隨時間變化的輸入量的響應特性。動態力測試場合有很多,例如:航天技術中對火箭和導彈在發射過程中動態推力的測試;飛機在飛行過程中發動機的動態推力;各種火炮彈道動態力的測試;戰術導彈內埋式彈射發射裝置三分量動態力測試系統等。
動態特性分為時間域指標和頻率域指標,時間域指標往往通過高速瞬時的動態信號來對傳感器進行測試,查看傳感器的響應時間。此動態信號要求具有高速瞬時性,且力值可控。本文介紹了一種基于落錘沖擊的動態力校準裝置,并重點介紹了動態力信號的采集方式和數據分析。
1 動態力傳感器校準裝置
動態信號是指幅值大小隨時間變化的信號,常用的動態信號有正弦信號、階躍信號、負階躍信號等。本校準裝置用于測試動態力傳感器的高頻響應,目的是產生高速瞬時的動態力信號,在此,選擇了負階躍力信號作為測試信號。即首先加載一定的力值,然后通過某種方式將力值迅速釋放為零,通過分析傳感器從力值輸出響應到零狀態響應的時間來判斷力傳感器的動態性能。動態信號從力值加載狀態到釋放為零的時間快慢是系統優劣的關鍵。時間越短越有利于校準動態力傳感器的動態響應。
本項目中的校準裝置由液壓站、力值加載系統、落錘系統、電氣控制系統、數據分析系統等組成。
總系統原理圖如圖1所示。
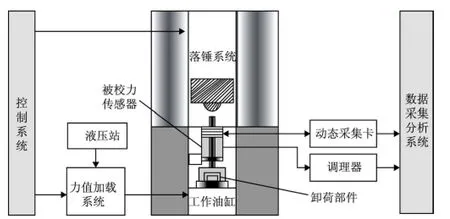
圖1 總系統原理圖
力值加載系統是通過砝碼和液壓站來實現的,通過電機和電磁閥的協調工作供給工作油缸一定壓力,利用工作油缸之間的面積比即可實現力值的放大與加載力值大小的控制;力值的快速釋放是通過高速下落的錘體沖擊沖桿使卸荷材料斷裂來實現的。通過動態采集力傳感器的輸出來實現動態響應測試。
2 動態力信號的采集設計
對力傳感器的輸出進行采集是整個校準過程中的一個極為重要的環節,以后的信號處理,力傳感器動態指標的計算都是以信號采集系統采集到的數據為基礎的,信號采集中產生的誤差將會直接影響對整個裝置的技術指標的確認。
國內外動態力傳感器的動態響應一般在100 kHz以內,為了滿足精度要求并根據采樣定律,選擇采樣速率可以達到1 Msamples/s,即實現10倍的采樣速率。
最終通過比較不同廠家的采集卡,采用了在動態高速采集領域占有絕對優勢的NI產品——動態數據采集卡NI6132。
本采集卡的數據采集速率最大為2.5 MSamples/s,每秒鐘可以采集2.5 M個數據點,采集卡上有16 MS的緩存,為了保證數據采集的完整性,避免數據的丟失,可以在動態采集的同時,將數據保存到板卡緩存中,待采集完成后,再保存至外圍設備,進行數據處理,或者數據回放。
2.1 采集軟件的設計實現
本部分軟件采用了LabVIEW2012實現,為了能夠采集到整個落錘沖擊過程又不至于采集的數據量過大,選擇1 MHz左右的采集速率,采樣時間可以設定為1~10 s之間,有限采樣方式。由于試驗中落錘落下的時間不到1 s,可以由人為控制在落錘下落之前打開采集控制,然后再控制落錘落下。
軟件的基本功能框圖如下圖2所示。
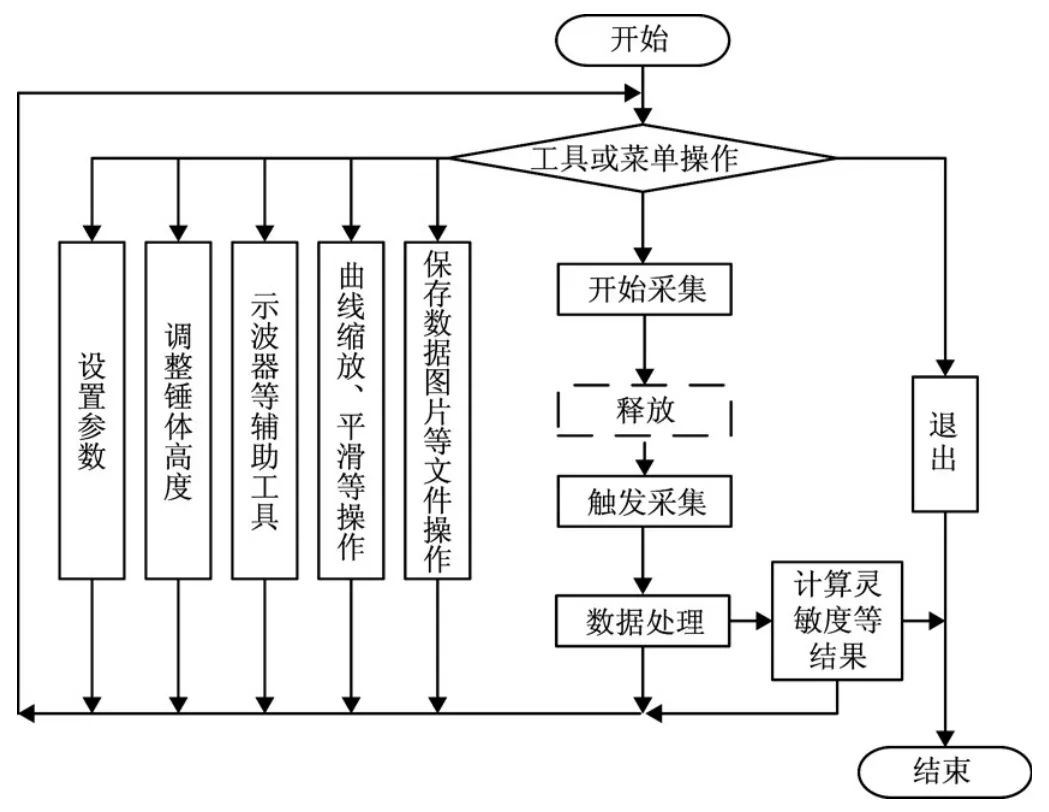
圖2 軟件功能框圖
采集設計的關鍵部分:觸發采集與有限采集
由于傳感器的動態響應時間在十幾個微秒量級,這就對數據采集部分的采樣速度要求很高。如果采樣率設置過高,在一定時間內的數據量巨大,這就提高了緩存要求。因此,采樣率和數據存儲量的協調配置非常重要。這就需要在實際試驗中驗證不同配置參數的采集效果。
LabVIEW軟件設計中采集有兩種方式可用:一種是有限點采集;一種是觸發采集。
1)有限點采樣
根據采樣定律,設定每一微秒采集一個數據點,即采樣率為1 MHz,如果實驗流程在10 s之內,有限點數可以設定為10 M以內,板上緩存16 M可以滿足需要,完全采集完畢后再進行硬盤存儲。此種方案,對人為操作有限制,在點擊采集控制之后需要馬上進行落錘沖擊試驗,整個過程要控制在10 s之內。
2)觸發采集
即設定觸發電壓,由于落錘落下時首先會對傳感器有一個瞬時的沖擊,這個沖擊力大于靜態力值,傳感器的輸出也有一個瞬時變化,可以將此瞬時電壓設定為觸發電壓,當傳感器輸出達到觸發電壓時,開始進行數據采集,然后采集2 s后自動停止。這種方式需要傳感器的動態響應性能比較好,能夠對瞬時沖擊力產生響應,此外,對此響應值需要有一個預先估計。
上述兩種方式均進行了試驗,觸發采集到的數據量比較小,方便處理,但對某些動態響應比較差的傳感器可能無法捕捉到觸發電壓,而導致無法完成采集操作。
2.2 軟件的時序設置
由于軟件需要對不同設備依次進行操作,這不僅對操作的先后順序有很高的要求,而且對間隔操作之間的時間控制也有要求。在實際設計中不僅要考慮到校準要求,同時也需要考慮到人員操作的習慣性。在實現基礎功能的前提下,同時要保證界面操作簡單,人員上手容易,糾錯容易等。
3 動態信號數據分析
由于采集板卡周圍有各種控制電機和供電電源以及電荷放大器等電子設備,實際采集到的數據往往有一些高頻信號干擾,為了濾除干擾信號,軟件采用了低通濾波方式,并設置為100 Hz的低通濾波頻率,最終得到了容易辨識的信號。圖3為LabVIEW程序的處理部分框圖。圖4為原始信號和濾波信號比較圖。

圖3 信號分析框圖

圖4 信號濾波比較圖
動態信號時域分析中的一個重要指標就是信號下降時間,即動態傳感器對突變信號的一種及時響應的性能分析。本項目中指的是傳感器在受到力值加載狀態到卸荷狀態的輸出響應時間,由于實際試驗中力傳感器在卸荷以后往往有一些小幅震蕩輸出,在此為了能夠靈活判斷下降沿和卸荷為零的位置,使用游標固定在曲線的方式進行定位,并根據采樣率得到每個點的采樣時間,通過游標定位的X坐標得到下降曲線的總采樣點,并通過點數和時間相乘得到下降時間。
某型號動態傳感器采樣信號分析圖,局部放大圖如圖5所示。
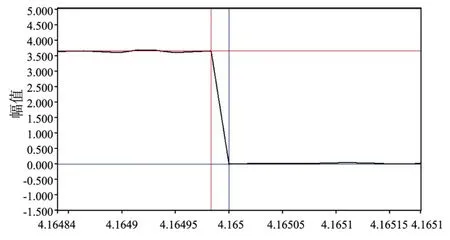
圖5 信號分析局部放大圖
游標示意圖如圖6所示。
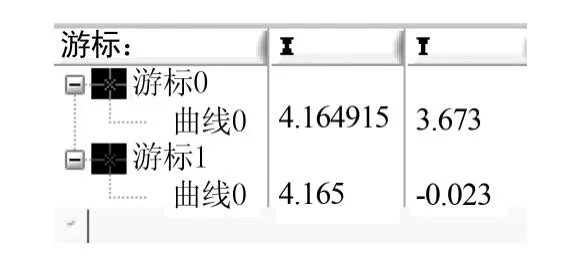
圖6 游標計算圖
下降時間為(4.165-4.164915)s=85 s
4 總結
本項目在動態信號采集設計過程中,曾經因為無限采樣和局部打包存儲而導致實際數據的丟失,后通過存儲數據的時間與采樣率和采樣數據量的不一致而發現問題的關鍵,并及時修正為觸發采樣和有限采樣方式,并很好的應用了硬件固有的緩存區域進行了數據的一次性存儲。本項目是針對高速信號采集和處理的一個實例,對動態傳感器的校準研究作出了貢獻,并實際應用在了某型號動態力測試系統中。
由于項目需要,本文沒有進行動態信號的頻域分析,希望以后在動態信號的處理方面進一步研究頻率域的性能分析,為動態傳感器等全面性能分析作出努力。
[1]張偉.小力值推力測試系統動態標定裝置的研究[D].大連:大連理工大學,2008.
[2]向科峰.基于Labview的數據采集系統設計與實現[J].機械管理開發,2011(4):191-192.
[3]張祝,呂彥明,徐看,等.動態力信號采集系統的軟件濾波[J].機械制造,2013(2):11-14.
[4]李達,魏學哲,孫澤昌.Labview數據采集系統的設計與實現[J].中國儀器儀表,2007(1):49-52.
[5]梁志國,孟曉風.一種負階躍力源上升時間的評價[J].計測技術,2008(6):13-15.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25