非線性特性在船舶電力系統(tǒng)中的研究及仿真
2015-12-04 07:06:18王超,王剛
艦船科學(xué)技術(shù) 2015年1期
王 超,王 剛
(沈陽工程學(xué)院,遼寧 沈陽110136)
0 引 言
船舶電力系統(tǒng)的穩(wěn)定性是指在航行過程中系統(tǒng)受到干擾(如絕緣故障﹑系統(tǒng)負(fù)載瞬間突變以及海水乳濁等)時,系統(tǒng)各支路發(fā)電機(jī)是否能夠在一定范圍內(nèi)保持同步,并提供穩(wěn)定頻率的電壓。由于現(xiàn)代船舶電力系統(tǒng)結(jié)構(gòu)越來越復(fù)雜,負(fù)載分支也越來越多,導(dǎo)致船舶供電穩(wěn)定性更加重要。
船舶電力系統(tǒng)屬于一類非線性控制系統(tǒng),同時隨著現(xiàn)代控制理論的發(fā)展,系統(tǒng)的自動化程度不斷提升,與傳統(tǒng)的機(jī)械發(fā)電不同,現(xiàn)在大部分已采用自動化發(fā)電方式,這就對電力系統(tǒng)的穩(wěn)定性提出更高要求。
本文首先研究了系統(tǒng)支路負(fù)載與發(fā)電機(jī)組的非線性特性,基于魯棒性控制原理,建立了非線性數(shù)學(xué)模型,反映了整個支路負(fù)載與發(fā)電系統(tǒng)耦合特性以及負(fù)載動靜態(tài)過程。
最后,本文提出了一種利用Hamilton 函數(shù)方式的并聯(lián)電力非線性控制系統(tǒng),通過預(yù)置系統(tǒng)狀態(tài)以及運(yùn)行狀態(tài)反饋系統(tǒng)非線性特征系數(shù)來調(diào)節(jié)系統(tǒng)的連續(xù)性及穩(wěn)定性,并通過仿真驗(yàn)證了系統(tǒng)的有效性。
1 船舶電力系統(tǒng)的非線性原理
1.1 電力系統(tǒng)非線性特性
一般船舶電力系統(tǒng)主要由變電器﹑連接電纜﹑發(fā)電源機(jī)組﹑中央控制器以及配電裝置組成,是一個異構(gòu)復(fù)雜的非線性結(jié)構(gòu)。而電路中每個元器件特性各不相同,對元器件的單獨(dú)分析是不現(xiàn)實(shí)的,所以對整個系統(tǒng)的非線性以及造成供電系統(tǒng)不穩(wěn)定的主要元器件進(jìn)行分析成為主流。
現(xiàn)在,根據(jù)船舶電力系統(tǒng)不同的負(fù)載模型,對系統(tǒng)的非線性數(shù)學(xué)模型主要有以下3 種:網(wǎng)絡(luò)降階模型﹑普通簡化模型﹑網(wǎng)絡(luò)保留結(jié)構(gòu)。本文主要對網(wǎng)絡(luò)降階模型進(jìn)行研究。
假設(shè)在穩(wěn)態(tài)過程中,發(fā)電機(jī)組的輸出功率保持不變,電力系統(tǒng)負(fù)載可用接入中性點(diǎn)的相同阻抗來代替,n 臺發(fā)電器組可以等效為帶有n個電源節(jié)點(diǎn)的網(wǎng)絡(luò),因此n 臺發(fā)電器組構(gòu)成的電力系統(tǒng)的數(shù)學(xué)模型可以用一個2n 階的非線性偏微分方式來表示,如圖1 表示為n 組多電機(jī)系統(tǒng)的網(wǎng)絡(luò)結(jié)構(gòu)圖,圖2為其數(shù)學(xué)模型。

圖1 多發(fā)電機(jī)組電力系統(tǒng)Fig.1 Multi generator power system

圖2 電力系統(tǒng)數(shù)學(xué)模型Fig.2 The mathematics model of power system
整個系統(tǒng)將負(fù)載節(jié)點(diǎn)、發(fā)電機(jī)內(nèi)部電路、發(fā)電機(jī)端口電路進(jìn)行整體建模,圖2 中f(?,V)函數(shù)為非線性,且在各種狀態(tài)下滿足二階擺動方程f(?,V)=。通過對網(wǎng)絡(luò)結(jié)構(gòu)的數(shù)學(xué)模型分析可以得到影響系統(tǒng)穩(wěn)定的關(guān)鍵元器件動態(tài)特性。
1.2 船舶電力系統(tǒng)的非線性控制
現(xiàn)代船舶電力系統(tǒng)對于非線性控制一般有以下2 種方式:
1)將相同型號發(fā)電機(jī)組構(gòu)成的電力系統(tǒng)近似線性化,依據(jù)H∞線性控制理論,采用自動化控制技術(shù)與PID控制相結(jié)合來控制發(fā)電機(jī)在負(fù)荷變化條件下的電壓幅值及頻率穩(wěn)定性。
2)采用理想建模方法精確描述電力柴油機(jī)轉(zhuǎn)速與供電電壓之間的相互關(guān)系,建立船舶電力柴油機(jī)的非線性模型,同時將非線性模型等化為H∞線性控制、勵磁控制及反饋系統(tǒng)控制器共同控制供電系統(tǒng)的穩(wěn)定性。圖3 給出了此種方式的船舶電力系統(tǒng)非線性控制結(jié)構(gòu)。
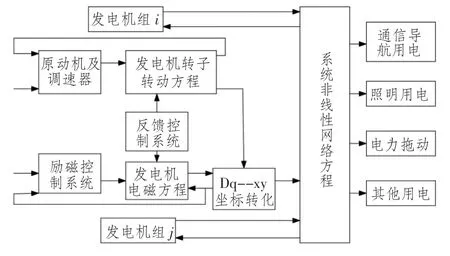
圖3 船舶電力系統(tǒng)的控制結(jié)構(gòu)圖Fig.3 The control structure diagram of ship power system
2 動態(tài)負(fù)載船舶電力系統(tǒng)數(shù)學(xué)模型
2.1 柴油發(fā)電機(jī)組的同步輸出功率
將圖1 中發(fā)電機(jī)端口電路電壓U 分為d,q 方向的2個分量,表達(dá)式如下:

現(xiàn)實(shí)中各電網(wǎng)供電系統(tǒng)之間距離較短,傳輸電纜的電壓幅值及頻率較低,傳輸電纜阻抗及變頻器阻抗可近似為零,則發(fā)電機(jī)電流如下:
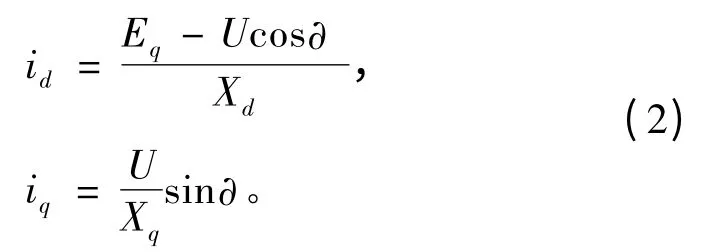
其中Eq為不加負(fù)載時發(fā)電機(jī)電勢。
系統(tǒng)穩(wěn)態(tài)時的電勢E′q與Eq之間的聯(lián)系為:

船舶三相發(fā)電機(jī)組的輸出功率為:

同時由于船舶電力系統(tǒng)發(fā)電機(jī)組都是同步發(fā)電,Xd≠Xd,將式(2)中的id,iq代入式(4),可得到有功功率輸出方程:

柴油發(fā)電機(jī)功率角度?與其電轉(zhuǎn)速ω 之間有如下關(guān)系:

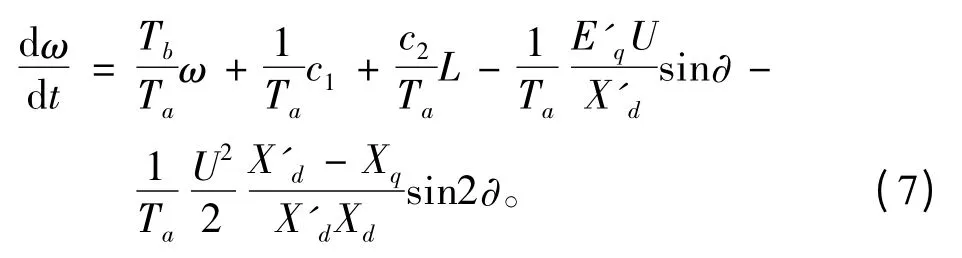
其中ω0為穩(wěn)態(tài)時的初始轉(zhuǎn)速。將式(6)代入式(5)并結(jié)合算式(2)和式(3),即可得到柴油發(fā)電機(jī)組非穩(wěn)態(tài)下的非線程數(shù)學(xué)方程:
2.2 柴油發(fā)電機(jī)組分散勵磁系統(tǒng)描述
船舶電力結(jié)構(gòu)中的勵磁控制器在整個非線性系統(tǒng)中的位置如圖1所示,現(xiàn)在對其一般采用三階數(shù)學(xué)模型分析,并且假設(shè)發(fā)電機(jī)電子轉(zhuǎn)速恒定,且忽略非穩(wěn)態(tài)的凸極情況,則勵磁控制器暫態(tài)方程如下:

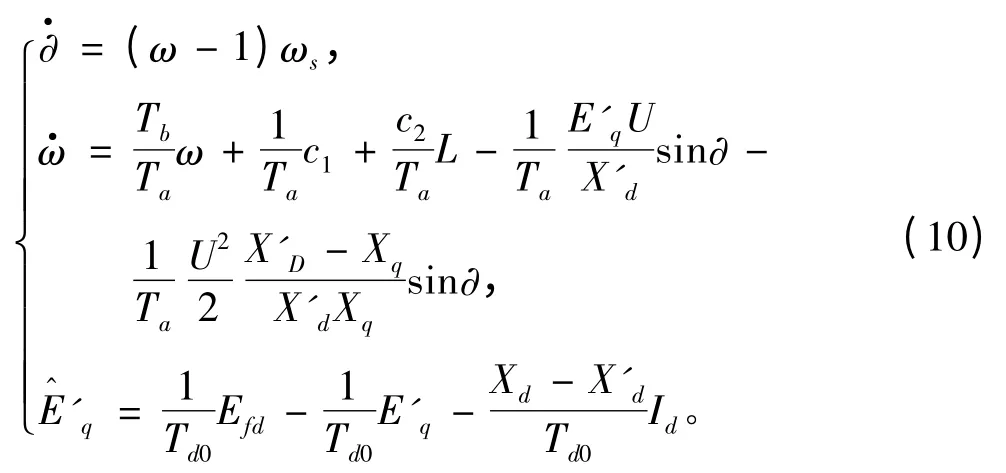
將式(7)代入此方程得到其動態(tài)方程:

聯(lián)系式(8)和式(9),可得到分散勵磁控制系統(tǒng)的三階數(shù)學(xué)方程如下:
2.3 船舶電力系統(tǒng)的動態(tài)負(fù)載描述
現(xiàn)在船舶由于其容量越來越大,電路系統(tǒng)的負(fù)載容量也越加龐大,負(fù)載主要由永磁同步電機(jī)及螺旋設(shè)備組成。
永磁同步電機(jī)同樣采用d-q 坐標(biāo)描述,理想狀態(tài)下有如下假設(shè):
1)永磁電機(jī)磁路消耗忽略,并且電機(jī)沒有強(qiáng)阻尼干擾。
2)三相電機(jī)的電壓及電流相等。
3)永磁電機(jī)的磁體不會衰變。
則它在d-q 坐標(biāo)下的電壓方程如下:

式中rS為定子電阻;np為極對數(shù);ωr為發(fā)電轉(zhuǎn)子轉(zhuǎn)速;φd和φq為磁體的坐標(biāo)分量。
船舶動力系統(tǒng)的負(fù)載可用如下方程表示:
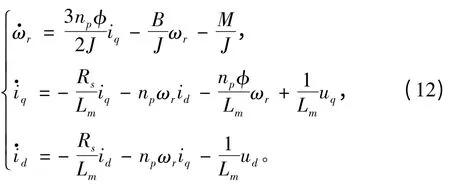
式中Lm為d-q 坐標(biāo)下勵磁電感;φ 為永磁體產(chǎn)生的磁場;M 為負(fù)載轉(zhuǎn)矩;J 為轉(zhuǎn)子定量;B 為系統(tǒng)阻尼大小。
3 Hamilton 方法控制系統(tǒng)及仿真
3.1 Hamilton 方法非線性控制描述
船舶電站的非線性控制系統(tǒng)結(jié)構(gòu)如圖4所示。
圖4 是基于Hamilton 函數(shù)非線性控制思想,整個控制系統(tǒng)采用先分后合,分為暫態(tài)穩(wěn)定以及動態(tài)系統(tǒng),同時采用Hamilton 方法設(shè)計控制器使得系統(tǒng)中影響供電穩(wěn)定的主要器件保持恒定,提高系統(tǒng)的暫態(tài)穩(wěn)定性,算法如下:
1)Hamilton 函數(shù)輸入(u,y)為一階輸出,則整個控制系統(tǒng)穩(wěn)態(tài)子狀態(tài)方程如下:
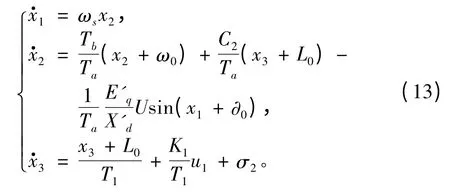
式(13)為控制器輸出的電壓u1的零暫態(tài)方程。
2)設(shè)計控制器的電壓u1使得上式中內(nèi)部保持恒定,同時需要設(shè)計勵磁控制器u2,使整個船舶電力非線性控制系統(tǒng)達(dá)到動態(tài)平衡。根據(jù)魯棒理論,系統(tǒng)平衡的評價如下式:

上式q1和q2為權(quán)重因子,用來調(diào)節(jié)輸出電壓穩(wěn)定。
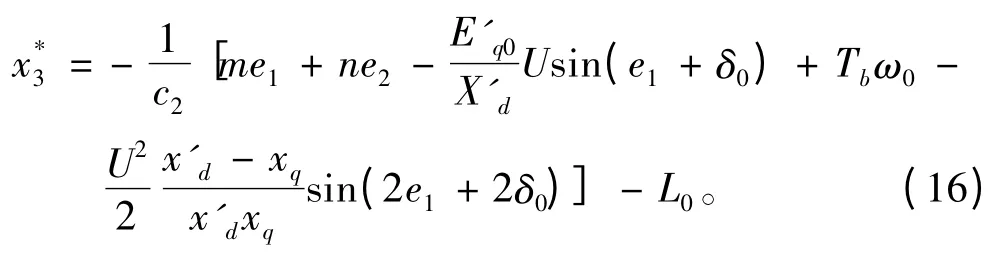
3)令x1=e1,取得虛函數(shù)=-ce1,同時V1,可得下式:

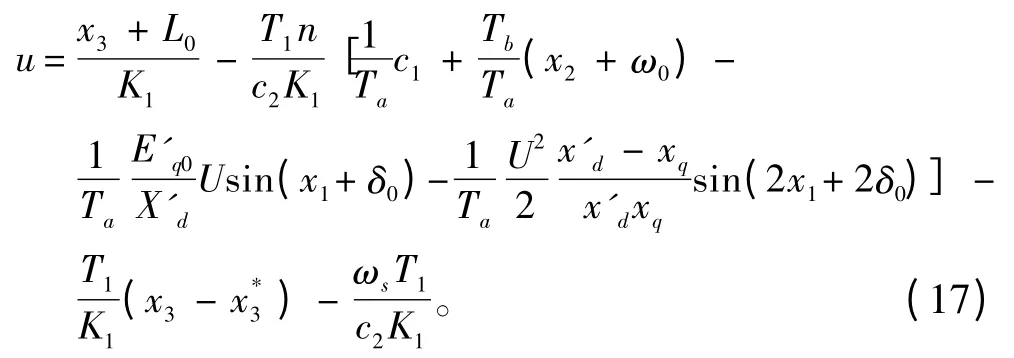
5)最后取得基于Hamilton 函數(shù)方法的控制器u 公式:
3.2 算法仿真
船舶柴油發(fā)電的功率值為1 250 kW,機(jī)組轉(zhuǎn)速為n=1 500 r/min,額定傳輸距離為11.9 kN·m,同步發(fā)電機(jī)組三相電壓390 V,電流為2 310 A,因子系數(shù)為0.8,勵磁控制系統(tǒng)電壓83 V,電流為7.7 A,各參數(shù)如表1~表4所示。

表1 發(fā)電機(jī)參數(shù)Tab.1 Parameters of generator

表2 系統(tǒng)參數(shù)Tab.2 System parameters

表3 負(fù)載電子器件參數(shù)Tab.3 Parameters of electron device

表4 非線性控制參數(shù)Tab.4 Nonlinear control parameters
圖5 給出了仿非線性控制方法的負(fù)載功率仿真曲線。
通過圖5 可以看到,控制系統(tǒng)隨著時間的推移不斷的改善了發(fā)電機(jī)輸出電壓的品質(zhì),該控制系統(tǒng)在船舶電力系統(tǒng)中具有較強(qiáng)的動態(tài)穩(wěn)定性。
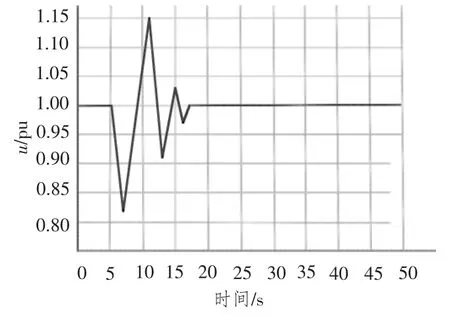
圖5 仿真曲線圖Fig.5 The curve of simulation result
4 結(jié) 語
本文首先研究了現(xiàn)代船舶電力系統(tǒng)的非線性原理及特性,隨后詳細(xì)描述了動態(tài)負(fù)載非線性數(shù)學(xué)模型,以及支路負(fù)載與系統(tǒng)非線性的耦合,同時給出了柴油發(fā)電機(jī)分散勵磁控制系統(tǒng)描述。
最后本文給出了一種基于Hamilton 函數(shù)方法的船舶非線性電力控制系統(tǒng),詳細(xì)了描述了此方式算法步驟,并通過仿真證明了該方法的有效性。
[1]ZHAO Jie-mei,MENG Jie,ZHANG Li-jun.Passivity-based sliding mode predictive control of discrete-time singular systems with time-varying delay[C]//IEME 2011.
[2]ISHIMARU M,YOKOYAMA R,SHIRAI G,et al.Robust thyristor-controlled series capacitor controller design based on linearmatrix inequality for a multi-machine power system[J].Electrical Power Energy Systems,2002,24:621-629.
[3]都紹裘.非線性波阻及船型優(yōu)化研究[J].艦船科學(xué)技術(shù),1994(6):1-5.
[4]張冰,姜長生.艦船在水平面運(yùn)動中非線性模型的建立[J].艦船科學(xué)技術(shù),2005(5):25-27.
[5]ESEOBAR G,SIRAR H.A Passivity based-sliding mode control approach for the regulation of power faector precompensators[J].Decision and control,1998(3):2423-2424.
[6]錢佳,何祖軍.船舶動力定位非線性自適應(yīng)濾波算法[J].艦船科學(xué)技術(shù),2013(12):25-28.
[7]JASWANTH C,RANJITH M,ASAD Davari Edge detection and segmentation formachine vision[C]//IEEE,2005:457-461.
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
大電機(jī)技術(shù)(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
電力工程技術(shù)(2014年1期)2014-03-20 14:19:06
