動態模糊神經網絡在船舶航向控制器上的應用
2015-12-04 07:06:24周劍敏
艦船科學技術 2015年1期
周劍敏
(浙江國際海運職業技術學院,浙江 舟山316021)
1 船舶航向控制
當船舶在狹窄海域中航行時,極易發生碰撞事故,因而船舶的航向控制問題,一直是研究的熱點之一。在船舶行駛過程中,由于海岸的作用,船體常常會因為海浪的不規則擾動,而產生不對稱力,尤其在狹窄海域中,這種不對稱力被進一步放大,從而使得對船舶進行精細的控制變得十分困難[1]。通常情況下,只有經驗豐富的海員,才能解決問題。為了解決這一過程對于人工和專家知識的依賴,需要一種自動化的控制器,一些學者提出了船舶模型控制方法,將船舶控制的各種因素建模,然后利用相應的模糊規則來調整船舶的航向和姿態。由于船舶在航行中受到不斷的微小擾動,因而難以分辨船舶航行的變化究竟是海面的作用還是自動控制器的調整行為,使得該方法的實用性受到了限制。
為了能夠設計一種自動化的自動模糊控制器,部分學者提出了一種基于模糊神經網絡的方法[2-5],利用遺傳算法對控制器中的相關參數進行訓練。然而,這種方法的缺點是訓練的過程太長,可實現性較低。
此外,基于間接自適應模糊控制的方法也被應用于航向控制器中,但是在這種方法中自適應模糊控制規則的產生非常困難,因而在實用過程中,對于專家知識的依賴仍然比較嚴重。
為了解決以上問題,有學者提出了一種將模糊控制器與多結構控制方法相結合的方案。這種方案繼承了多結構控制器的可靠性,同時利用模糊控制器來確定多結構控制器中的重要參數,能夠在系統較為可靠的基礎上,實現較好的靈活性和精確性。這種方案的缺點在于多結構控制器的設計和實現比較復雜,應用其中的模糊規則較難設計,制約了該方法的實用性。
基于對以上研究成果的研究和分析,本文提出了一種將船舶控制模型與模糊控制機制相混合的方法。使用船舶控制模型,保證了該方法的可靠性,同時降低了方法的實現難度。為了實現較好的靈活性,本文設計了一種動態神經網絡,用來確定船舶模型控制過程中的3個重要參數。最后,本文對提出的方法進行了實驗驗證,證明了該方法具有較好的可靠性和靈活性。
2 船舶模型控制器
2.1 海面動態模型
對船舶航向和航行姿態的控制,通常通過調整推進器、船舵、首尾舵面等方法。因而船舶的動態模型是一個六自由度過程(DOF)。在該DOF 中,有3個水平運動和3個滾動運動,通常情況下,這些運動非線性、隨機且緊密結合。在實際應用中,通常認為對于船舶的航向和姿態控制,關鍵在于航向的控制,而其他姿態的運動,由于幅度較小,因而可以忽略。在這種前提下,在橫軸上,可以將運動模型抽象為:

其中:g(x)為船舶的航向;T和K 分別與船舶的速度和載重相關,并隨著環境的變化而變化,所以航向控制器需要不斷調整以適應T和K的變化。根據式(1)中表示的轉移函數,可將運動模型的狀態空間表示如下:

2.2 模型控制器設計
令g*(x)為預定航向,e=g(x)- g*(x)為預定航向與當前航線之間的誤差,則可得船舶模型的狀態空間為:

其中xc為模型的狀態變量。除了xc外,船舶模型的基本變量還有g(x)和g′(x),則狀態反饋矩陣為:

其中Kc為模型的增益。根據以上方程,可得模型控制器的基本結構如圖1所示。同時可將圖1 中的帶有反饋的控制器表示為:

由于g(t)=g*(t)-e(t),且g′(t)=-e′(t),則式(5)可以表示為


圖1 船舶航向控制器結構圖Fig.1 Structure of ship course controller
根據式(6)可知,前3 項為PID控制系統,最后一項k1g*(t)使得船舶控制系統成為一個狀態反饋系統,同時閉環系統的極點決定了系統控制行為的性能。
將閉環系統看做一個串聯系統,則可得串聯系統矩陣為:

若令a=K/T,b=1/T,則矩陣可簡化為:

則該串聯系統的特征多項式為:

令λ1,λ2,λ3為閉環系統的極點,則航向閉環控制系統的特征多項式為:
則可得控制器參數與極點的關系為:

其中λ1、λ2為主要極點,需要利用訓練和學習過程得到,令λ′1、λ′2為最優極點,則:

其中σ 為比例系數,則在不同的比例系數下,航向控制器的性能表現如圖2所示。

圖2 不同比例系數性能圖Fig.2 Performance under different σ
由圖2 可知,當σ 越大時控制系統的靈活性就越高,然而其控制的幅度也會變大,造成較大的誤差。為了保證系統的靈活性和精確性,需要對σ 進行確定,本文設計了一種模糊神經網絡來解決該問題。
3 動態模糊神經網絡
船舶的運動主要由誤差e(t)和航向變動率g′(t)來確定。富有經驗的船員在操作船舶時,當誤差逐漸變大時,會通過適當增大舵面角度來調整航向;當誤差逐漸變小時,會通過減小舵面角度來穩定航向。根據以上原理,本文設計了一種動態模糊神經網絡,根據e(t)和g′(t)來確定閉環系統的極點[6-7]。在上節的分析中,極點由σ 確定,所以模糊神經網絡控制器的輸出為σ。則根據圖1,可將神經網絡部分與模型控制系統相融合,如圖3所示。

圖3 航向控制系統整體結構圖Fig.3 Architecture of course control system
采用乘積推理機、單值模糊器和中心平均解模糊公式獲得模糊控制器輸出。如下式:
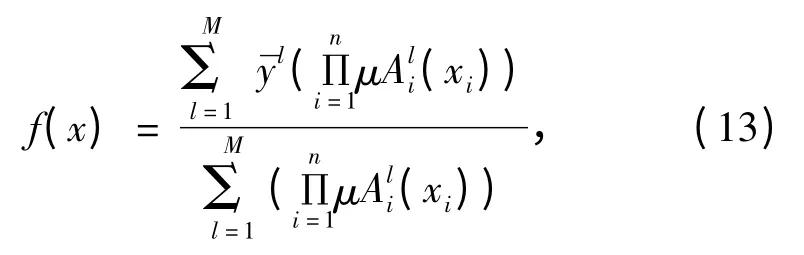
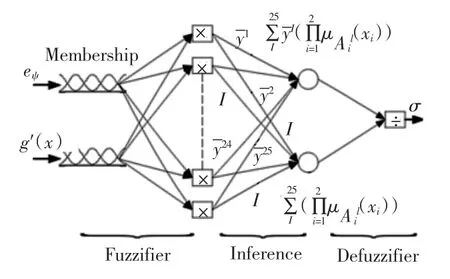
圖4 神經網絡結構圖Fig.4 The structure of neural network
以上模糊神經網絡包含模糊器、推理機、解模糊器3個部分[8]。具備了神經網絡模型之后,首先需要設計模糊器。令10°為最大容忍誤差,則可得以下公式:

通過歸一化之后,e和g′取值均在[-1,1]中,e和g′的隸屬度如圖5所示。

圖5 g′與e的隸屬度圖示Fig.5 The membership of e and g′
分析式(14)和式(15)可知,e和g′被均分為5個域,則輸入平面被均分為25個域。其中的有效域如圖6所示。
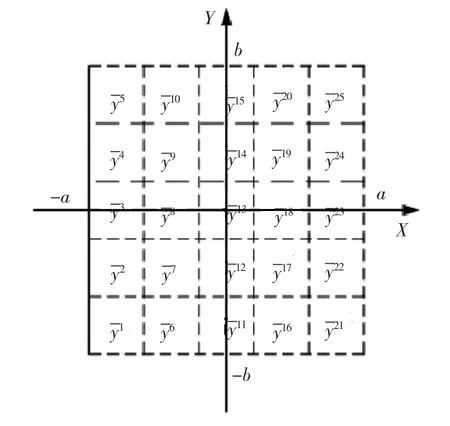
圖6 輸入平面中y的有效域Fig.6 The effect field of y in input plane
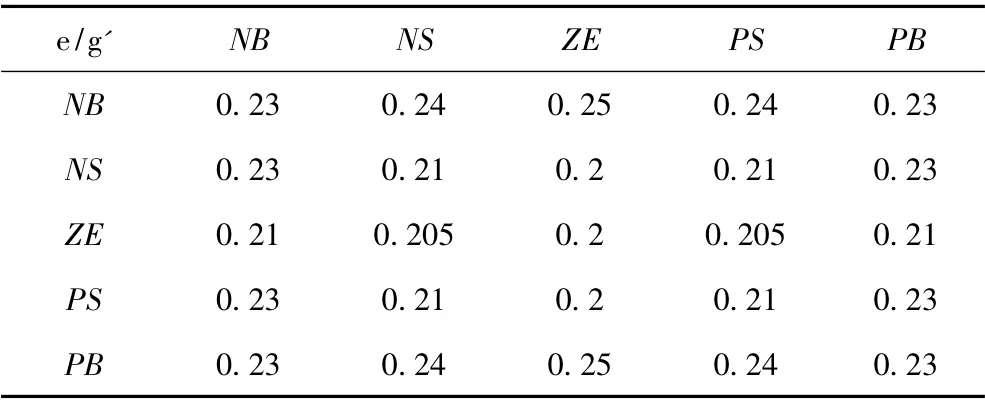
表1 y的最終值Tab.1 Final value of y
4 實驗驗證
根據圖3所示的結構圖,本文設計并在Matlab中對基于船舶控制模型和動態神經網絡的航向控制系統進行了實驗驗證。在平穩海域中,對于航向控制的結果如圖7所示。根據實驗數據,在航向調整角度為30°時,幅度偏差值為5%。這一性能表現證明,本文提出的混合航向控制器能夠滿足實際需求。

圖7 系統性能表現Fig.7 The performance of the system
與純船舶模型控制方法相比,本文提出的混合方法控制器,不僅能夠提供更加靈活的反應水平,并且還具有較小的調整偏差。主要原因是通過動態模糊神經網絡,能夠產生不同的比例系數σ。當航向誤差很大時,神經網絡的輸出同時增大。在輸出變大的同時,其輸出同時受到誤差值和航向變化率的制約,使得調整的偏差值較小。
5 結 語
通過分析在狹窄海域中,船舶控制的實際問題,本文提出了一種混合船舶控制器,其采用的控制方法結合了船舶模型控制方法和動態模糊神經網絡。一方面能夠通過模型控制方法得到較好的可靠性和可實現性,另一方面能夠通過神經網絡的實時反應,提供較好的靈活性和精確性。本文設計了相應的模型結構和數學模型,并利用實驗驗證了本文提出的方法,通過與純模型控制方法相比較,證明了本文提出方法的靈活性和精確性。
[1]EDA H.A study of ship handling performance in restricted waters:Development and validation of computer simulationmodel[J].Trans.SNAME,1986(94):77-85.
[2]ZHANG Rong-jun,CHEN Yao-bin,SUN Zeng-qi,et al.Path control of a surface ship in restricted waters using sliding mode[J].IEEE Transactions on Control Systems Technology,2008(4):722-732.
[3]ZHOU Bo,CAI Feng,ZHANG Yong-sheng.The design and simulation of a fuzzy controller for course keeping[J].Ship Science and Technology,2004,26(3):26-27.
[4]何祖軍.船舶模糊航向控制器[J].艦船科學技術,2008,30(6):58-61,65.HE Zu-jun.Fuzzy controller for ship′s course steering[J].Ship Science and Technology,2008,30(6):58-61,65.
[5]LEE G,SURENDRAN S,KIM S.Algorithms to control the moving ship during harbour entry [J].Applied Mathematical Modelling,2009,33(5):2474-2490.
[6]LIU Yi-jian.The design of model reference fuzzy adaptive controller for ship heading [J].Control Theory and Applications,2003,22(5):11-14.
[7]HE Zu-jun.Ship′s course steering controller based on adaptive neural fuzzy inference system[J].Ship Engineering,2008,30(6):46-49.
[8]ZHUO Y,HEARN G E.Ship inteligent autopilot in narrow water[C]//Proceeding of the 27th Chinese Control Conference,2008:243-248.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
