中海達ZNetVRS解算軟件在北斗地基增強系統中的應用分析
2015-12-11 05:57:32馮世光潘國富
測繪通報 2015年2期
鄒 盛,馮世光,潘國富
(廣州中海達衛星導航技術股份有限公司,廣東廣州511400)
一、引 言
增強系統可以提高全球導航系統的導航定位性能,能滿足高精度的應用。自北斗衛星導航系統正式提供服務以來,地基增強系統的建設在我國陸續展開。而實現地基增強系統的主流算法為虛擬參考站(VRS)技術。
中海達CORS經過多年的實際項目錘煉,形成了北斗地基增強系統平臺建設的完整解決方案,系統的主要特點有:①國產自主品牌北斗接收機(支持B3信號/數據流加密);②具有自主知識產權的ZNetVRS解算軟件;③支持大型CORS系統建設(支持分布式運行);④支持在線坐標轉換系統;⑤參數加密、似大地水準精化成果運用;⑥可限制用戶作業區域;⑦及時短信報警機制。
中海達北斗地基增強系統方案可為每個基站配置智能插座,如圖1(a)所示。當接收機出現網絡或其他異常情況時,管理員可通過發送短信將接收機斷電再重啟。軟件則監控基站數據流,當出現數據中斷3 min的情況時,軟件會通過短信貓發送報警信息給管理員,以提醒管理員檢查維護系統,短信貓如圖1(b)所示。
二、ZNetVRS解算軟件架構
ZNetVRS解算軟件設計為一個多用戶、可擴展的空間位置信息服務平臺,能分別為DGPS用戶和RTK用戶提供實時分米級和厘米級定位服務,能為用戶實時提供厘米級大地高程數據服務(在加入精化大地水準面數據庫前提下,也能為后處理用戶提供毫米級定位服務)。

圖1
使用該軟件,用戶可以穩定地接入多個站點的三星數據,并進行測站和站網的監控,可以解算測站所構成的基線并能生成VRS數據。用戶可配置數據播發的格式,包括 CMR、RTCM 2.3、RTCM3.1、RTCM3.2及國內北斗差分格式。軟件可以根據當前基站數據給出當前區域的電離層活躍指數I95,指導外業工作。軟件設計的總體結構如圖2所示。
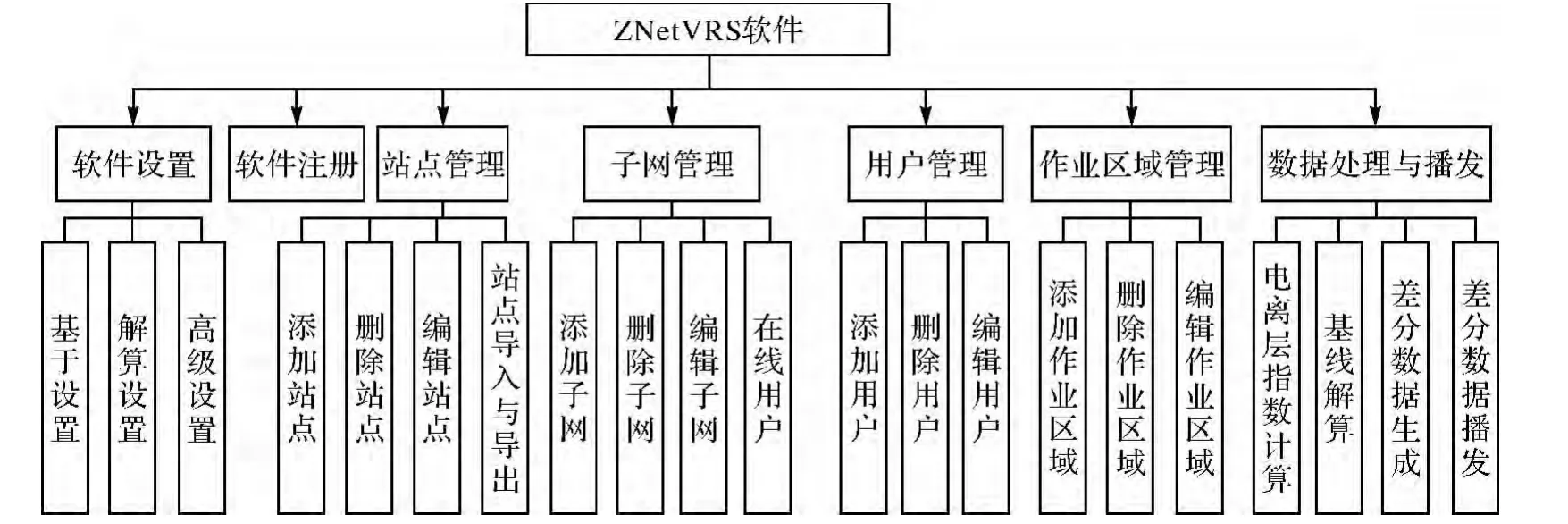
圖2 ZNetVRS軟件總體結構
三、ZNetVRS解算軟件的項目應用
ZNetVRS軟件已在多個北斗地基增強系統中得到應用。本文以由中海達公司承建的云南保山市新建北斗地基增強系統為例,詳細介紹軟件的應用。
保山市地基增強系統方案設計為11個基站的CORS網,包括新建9個中海達的VNet6(天寶主板的三星接收機)基站及2個原有國家站(一個是天寶三星接收機,一個是天寶雙星接收機)。
1.支持各類型基站解算
ZNetVRS解算軟件可以對不同品牌不同類型的CORS基站進行數據解算,并實現構網。兼容的國外廠商主板有 Trimble、Novatel、TOPCON、Leica、CSI等,國內廠商主板有和芯星通、和協航電等,并支持RTCM3.0及RTCM3.2格式的數據接入。針對目前大部分升級型CORS項目而言,可以將舊基站數據接入到ZNetVRS軟件,軟件可以以舊基站和新的北斗基站分別組網解算,既實現了對原有設備的利用,又達到了系統升級的效果。
管理員根據接收機選擇相對應的主板類型項進行基站定義,即可達到不同類型接收機成功組合為一個子網提供服務的效果。在保山項目中所有基站都選擇為VNet-T(天寶主板)類型進行基站解算。對于中海達自主品牌接收機,可以對基站數據進行加密。當基站數據加密后需要將數據流加密勾選框勾選,軟件會自動進行數據解密并解算。
2.支持北斗B3信號的解析
北斗衛星導航系統具備短報文通信、差分服務和完好性服務特色,在 L、S頻段發播導航信號,L頻段B1、B2和B3三個頻點上發射開放和授權服務信號。
ZNetVRS解算軟件可以解算包括GPS的L1、L2,GLONASS 的 L1、L2,以及 BDS 的 B1、B2 和 B3頻段的數據。全方位的頻段數據解算可以大大提高基線的固定準確率和精度,使系統可用性達到95%以上。軟件包括了對基站星空圖的展示模塊,可以實時顯示基站接收到衛星的星空圖。
3.用戶管理
ZNetVRS解算軟件可以同時支持超過1000個測量或導航用戶的接入。軟件管理員可以根據用戶移動站的性能和使用權限為其分配賬號。賬號信息包括用戶名、密碼、用戶到期時間、用戶可用金額等。測量人員根據管理員提供的賬戶信息進行登錄獲取差分數據,以達到高精度的定位數據實施測量工作。管理員還可以隨時進行用戶充值、修改密碼及查看所有在線用戶信息等操作。
4.基站組網及RTK精度測試分析
保山市北斗地基增強系統新建9個基站,并接入2個國家(板橋和施甸)站聯合組網,其中板橋站為天寶三星主機,施甸站為天寶雙星主機,整個系統組成11個站的中型CORS網。
該網中最長的基線64 km,最短基線長33 km。
為了檢測軟件算法的精度及偽距差分的定位服務的穩定性,對保山CORS系統測試采取實測方式進行如下試驗:①在CORS網作用范圍內選擇8個CGCS2000控制點(固東 M006、福祿地 M025、潞江M034、柯街 M043、施甸 M045、昌寧 M047、黃草壩M051、勐糯M054),8個點分布在網內的不同區域;②在每個已知點用中海達V30靜止開機后接收RTCM30和RTCM32差分數據分別定位,按1 s的采樣頻率連續記錄定位結果;③事后統計精度計算。
本文對8個已知點進行了基于RTCM30和RTCM32定位的精度對比測試,采集數據時間分別為24 h。對采集數據的解狀態進行統計,達到固定解的時間率超過全天95%,對精度統計結果見表1、表2。
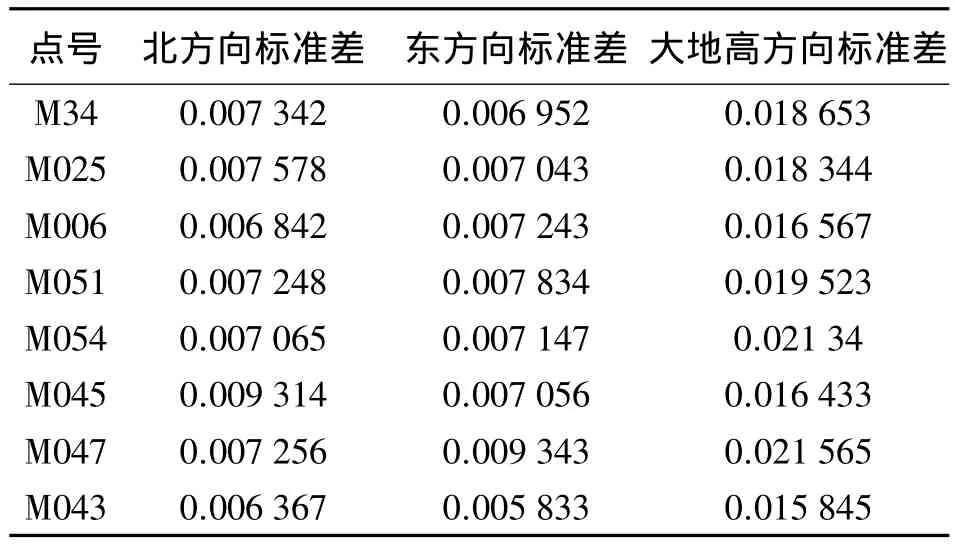
表1 RTCM30定位中誤差統計 m
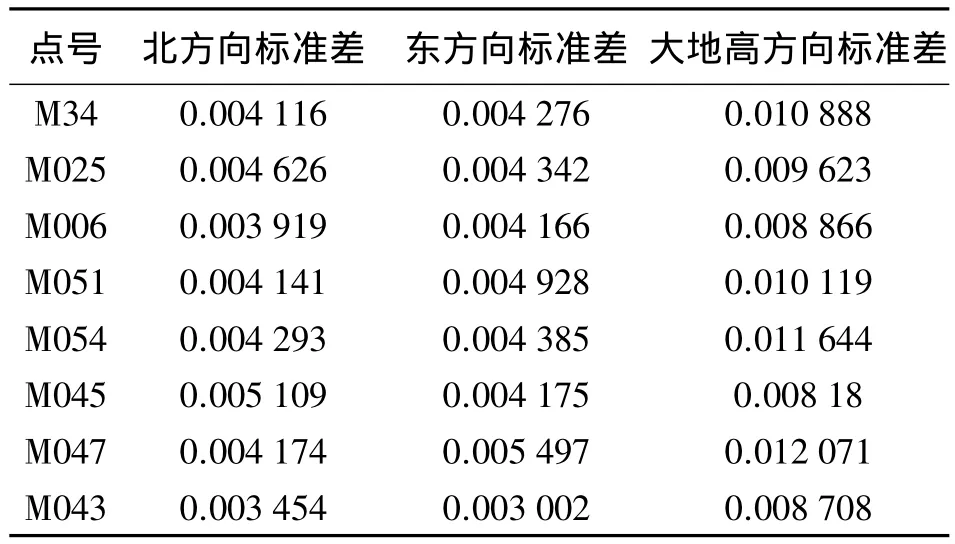
表2 RTCM32定位中誤差統計 m
從對比測試結果可以看出:
1)CORS網服務范圍內各個地方精度差異小,移動站工作不受與基站距離的影響。
2)采用 RTCM32(GPS+GLONASS+BDS)的RTK比RTCM30(GPS+GLONASS)定位精度要更高,高程方向有明顯提升,滿足常規測量精度要求。
3)本文系統能夠連續進行RTK差分定位服務,滿足不同時間段測量要求。
四、結束語
本文系統在多個北斗地基增強系統中實踐多年,可以無縫接入各類基站接收機,支持GPS、BDS、GLONASS全星座全頻段長基線解算,支持國際通用的兼容北斗的差分電文標準(RTCM3.2),兼容所有國內外品牌接收機的終端接入。測試表明,中海達ZNetVRS解算軟件應用于北斗地基增強系統的技術方案正確可行,且相對于只提供RTCM30的CORS系統,移動站的時間可用性和測量精度都更高。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
創業家(2015年10期)2015-02-27 07:55:08