大型風電機組安裝塔筒法蘭對中系統(tǒng)分析
2015-12-12 08:18:32樂韻斐范昌龍王慶洋
風能 2015年3期
文 | 樂韻斐,范昌龍,王慶洋
海上風電機組整體安裝是通過起重船鋼絲繩吊架系統(tǒng)吊起整個風電機組,然后由對中系統(tǒng)控制風電機組塔筒根部法蘭和安裝平臺塔筒法蘭對中,風電機組隨著起重船吊鉤位置下降而安放在海上安裝平臺上,最后用螺栓緊固,解開并拆除上部吊架系統(tǒng),完成安裝,如圖1所示。在海上風電機組整體安裝中,風電機組塔筒根部法蘭與安裝平臺塔筒法蘭的準確、高效對中直接影響到風電機組安裝效率,因此,開發(fā)出一套精確高效的塔筒法蘭對中控制系統(tǒng)具有重要現實意義。
圖像識別是利用計算機對圖像進行處理、分析和理解,以識別各種不同模式的目標和對像的技術,具有自動化、客觀、非接觸和高精度等特點。近年來圖像識別技術開始應用在工程領域,在海上風電機組整體安裝中,已經實現計算圓心和半徑的圖像處理對中控制系統(tǒng),但是這種方法計算量大,對周邊環(huán)境噪聲敏感。本文在NIVisionAssistant機器視覺模塊的基礎上,開發(fā)了一套基于圖像識別圓質心提取的對中控制系統(tǒng),提高對中效率。
塔筒法蘭對中系統(tǒng)原理
海上風電機組整體安裝塔筒法蘭對中系統(tǒng)主要由對中液壓執(zhí)行系統(tǒng)、對中圖像采集系統(tǒng)和上位機LabVIEW控制界面三部分構成。
對中液壓執(zhí)行系統(tǒng)如圖2所示,安裝平臺的左右相應位置各設置兩個液壓缸,液壓缸的一端鉸接在一起,鉸接點為銷孔座。另一端各自鉸接在安裝平臺上。銷孔座在兩個液壓缸的作用下可以在徑向和切向運動并到達指定的區(qū)域。風電機組根部法蘭在起重設備的適當操作下,銷軸能夠插進銷孔座實現風電機組和安裝平臺的初步定位,然后由上位機控制對中液壓缸帶動銷孔座進行精確對中,完成風電機組對中安裝。
對中圖像采集系統(tǒng)采用兩個高清免驅自動調焦攝像頭作為圖像采集器,把攝像頭USB輸出口直接和路由器端口相連便可以直接在上位機通過LabVIEW編程讀取相應攝像頭圖像,兩個對中攝像頭布置在塔筒法蘭相隔一定距離的法蘭孔中,風電機組塔筒根部法蘭與塔筒法蘭對中需要兩個法蘭平面平行并且至少兩個法蘭孔對中。對中圖像采集系統(tǒng)安裝結構如圖3所示。在安裝平臺塔筒法蘭孔內設置攝像頭筒套,攝像頭安置在套筒內,在風電機組根部待對中法蘭孔內設置燈盒套筒,照明燈安裝在燈盒套筒頂部,調節(jié)照明燈亮度可以得到最佳對中法蘭孔成像。
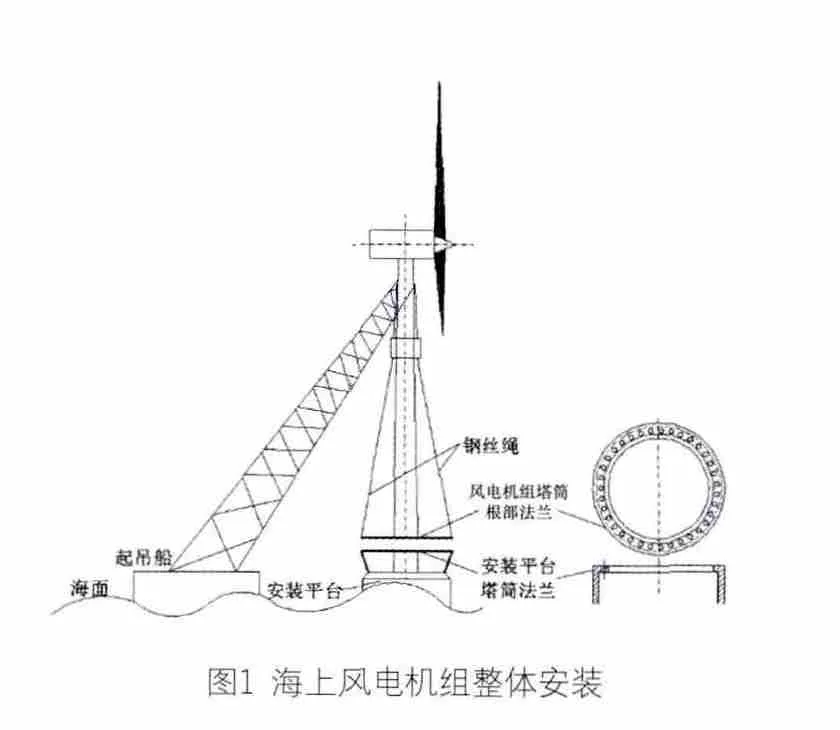
圖1 海上風電機組整體安裝

圖2 對中液壓執(zhí)行系統(tǒng)
海上風電機組整體安裝對中過程中,上位機發(fā)送指令控制對中液壓缸動作,同時安裝在塔筒法蘭孔內的圖像采集攝像頭實時監(jiān)測風電機組根部待對中法蘭孔的運動情況,并且同時將采集到的圖像反饋給上位機,上位機通過調用NIVisionAssistant視覺助手處理,識別并提取出風電機組根部待對中法蘭孔質心,通過判斷法蘭對中與否,再次發(fā)送指令控制對中液壓缸動作。這樣通過風電機組根部待對中法蘭孔圖像信息反饋,不斷控制對中液壓缸來調整風電機組根部法蘭位置,使之不斷向安裝平臺塔筒法蘭對中,對中控制流程如圖4所示。
使用NIVision Assistant對對中圖像的識別處理
取對中過程中經一路攝像頭采集回來的一幅原始圖像分析,如圖5(a)所示,使用NIVisionAssistant視覺助手對這幅圖像進行識別處理。從攝像頭獲取的原始圖像是一副彩色圖像,圖像處理之前需要進行顏色模型轉換,HSL亮度平面模型是常用的圖像處理顏色模型,可以把原始的彩色圖像轉換為亮度圖像,以便后續(xù)處理,顏色模型轉換后的圖像如圖5(b)所示。由于對中過程圖像較暗導致風電機組根部待對中法蘭孔與其他部分區(qū)分不明顯,可以使用查找表功能函數處理,在降低了圖像的亮度、減少了暗區(qū)的對比度的同時增加了亮區(qū)的對比度,從而突出風電機組根部待對中法蘭孔以便后續(xù)處理,處理后的對中圖像如圖5(c)所示。在對圖像特征做統(tǒng)計分析之前必須對圖像分割,把圖像分成若干個特定的、具有獨特性質的區(qū)域,提取出感興趣目標。通過圖像分割可以提取出風電機組根部待對中法蘭孔,處理后的對中圖像如圖5(d)所示。為了消除對中圖像噪聲粒子之間的小間隙,擴展目標點的輪廓,需要進行圖像基本形態(tài)處理,處理后的對中圖像如圖5(e)所示。由上述處理后,對中圖像視野中僅剩下較大的風電機組根部待對中法蘭孔和由于照明原因所形成的外圍一圈亮斑圓環(huán),可以使用高級形態(tài)處理消除外圍亮斑,處理后的對中圖像如圖5(f)所示。最后對圖像處理做出統(tǒng)計,得到所識別的風電機組根部待對中法蘭孔個數以及質心坐標。
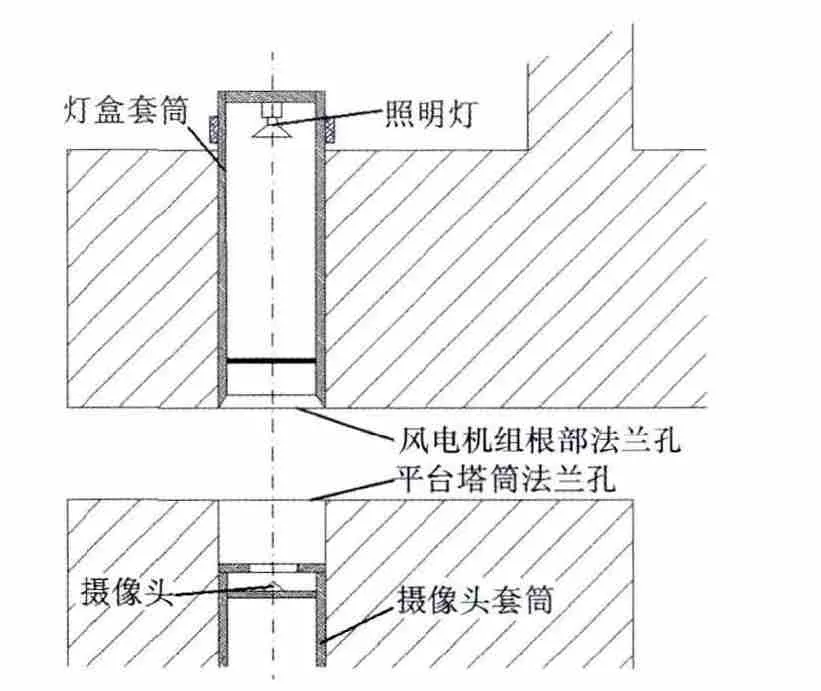
圖3 對中圖像采集系統(tǒng)安裝結構
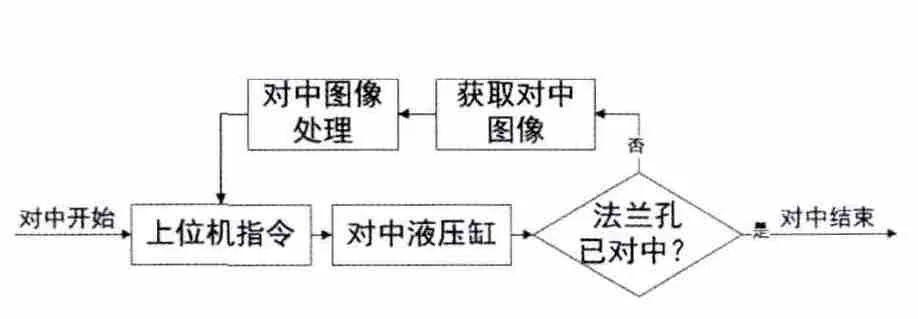
圖4 對中控制流程圖

圖5 NIVision Assistant圖像處理演示圖
使用NIVisionAssistant對對中圖像處理的程序流程如圖6所示。
對中結果分析
海上風電機組整體安裝對中過程中,上位機程序不斷記錄對中攝像頭視野中風電機組根部待對中法蘭孔質心坐標,取其中一路攝像頭圖像數據做對中全過程分析,質心坐標數據如表1所示,進而可以得到風電機組根部待對中法蘭孔質心運動軌跡,如圖7所示。
經過處理后的對中圖像在計算機中其實是個一維矩陣,這里的質心坐標代表風電機組根部待對中法蘭孔質心在攝像頭圖像矩陣中的坐標位置。在對中安裝之前,必須提前進行標定,把安裝平臺上固定不動的塔筒法蘭孔坐標標定出來,以便對中過程做控制參考。把風電機組根部待對中法蘭孔質心坐標和標定的塔筒法蘭孔坐標比較,就可以實時清晰地觀察對中過程中待對中法蘭孔與標定法蘭孔的實時位置,如圖8所示。
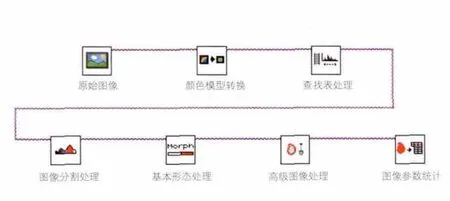
圖6 NIVision Assistant圖像處理流程
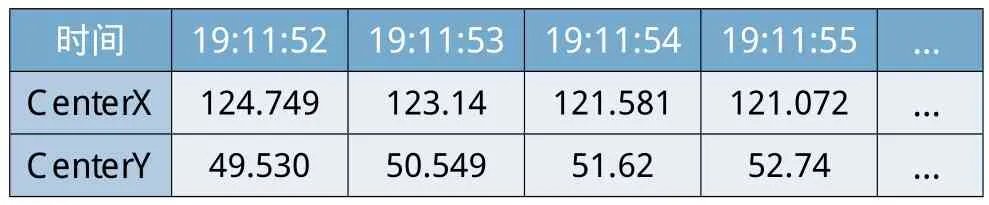
表1 對中全過程風電機組根部待對中法蘭孔質心坐標
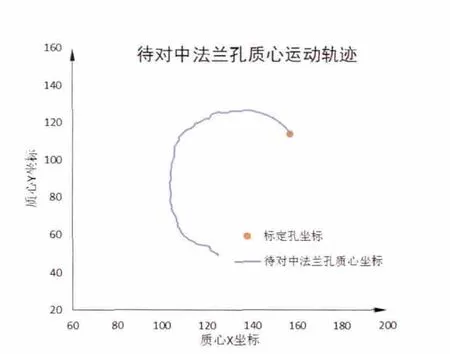
圖7 待對中法蘭孔質心運動軌跡

圖8 待對中法蘭孔與標定法蘭孔實時位置
從對中結果中可以看到,運用圖像識別提取風電機組根部待對中法蘭孔質心,可以很清晰的掌握與控制風電機組整體安裝對中過程,可以更精確高效指導風電機組安裝,提高安裝效率。
結語
海上風電的迅猛發(fā)展勢必會對風電機組的安裝提出更高要求,本文闡述的圖像識別提取風電機組根部待對中法蘭孔質心的對中方法,是圖像處理在工程領域的新應用,清晰、精確、高效率的指導和控制海上風電機組整體安裝,為大型風電機組整體安裝提供了新方案。