基于MHT的網(wǎng)絡(luò)化雷達抗干擾算法
2015-12-23 01:06:22張建軍
計算機工程與設(shè)計 2015年2期
關(guān)鍵詞:融合
張建軍
(中國人民解放軍92941部隊93分隊,遼寧 葫蘆島125001)
0 引 言
網(wǎng)絡(luò)化雷達集成了其組成雷達的資源并進行了信息融合,整體作戰(zhàn)能力極大提高[1]。分布式干擾將多個電子干擾機布置在特定區(qū)域,自動或受控地對目標進行干擾,相比于傳統(tǒng)干擾機更易進入目標雷達回波信號主瓣[2]。分布式干擾具有設(shè)備簡單、分布范圍廣等特點,有文獻對分布式干擾機的干擾性能進行了研究[3-5],常規(guī)的抗干擾方法對分布式干擾效果不理想,在分布式干擾的情況下,需要進一步研究如何提高雷達的抗干擾能力,實現(xiàn)對敵目標的有效檢測。
分布式干擾區(qū)域中,雷達對目標的檢測概率下降,并且雷達接收機數(shù)據(jù)量增加,為防止接收機飽和,需要提高虛警的檢測門限,雷達目標檢測門限的降低伴隨著虛警增加,所以需要研究抗分布式干擾的目標檢測算法。多假設(shè)跟蹤 (MHT)方法是處理數(shù)據(jù)關(guān)聯(lián)的最佳方法[6],MHT方法通過延遲決策實現(xiàn)了信息量在延遲中的積累,該算法由當前測量值和歷史測量值共同決定,適用于信噪比低的系統(tǒng)。本文提出了基于MHT 的網(wǎng)絡(luò)化雷達目標檢測算法,該算法利用MHT 在分布式干擾抑制中的優(yōu)良特性,并通過秩K 融合規(guī)則得出目標的檢測概率。仿真結(jié)果表明,本文算法能夠有效抑制分布式干擾,是一種有效的網(wǎng)絡(luò)化雷達抗干擾算法。
1 MHT算法
1.1 MHT算法原理
理想情況下,MHT 方法是數(shù)據(jù)關(guān)聯(lián)的最佳算法。MHT 數(shù)據(jù)關(guān)聯(lián)依賴于歷史測量結(jié)果和當前測量,MHT 具體處理流程如圖1所示。
(1)數(shù)據(jù)聚簇:基于聚簇的假設(shè)和目標是MHT 的處理對象,將新接收到的測量點跡與假設(shè)相關(guān)聯(lián)并進行更新。若測量點與舊簇不相關(guān),則形成新簇,若兩個獨立簇與同一測量點相關(guān),則這兩個簇形成一個超簇。
(2)假設(shè)生成:對每一個回波信號要考慮出現(xiàn)新目標的可能性,同時需要考慮虛警的可能性。設(shè)k時刻的假設(shè)是k-1時刻的假設(shè)與當前時刻數(shù)據(jù)關(guān)聯(lián)的結(jié)果。
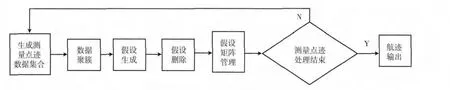
圖1 MHT 具體處理流程[7]
(3)假設(shè)刪除:去除不可行的假設(shè)。
(4)假設(shè)矩陣管理:假設(shè)生成和刪除是多假設(shè)跟蹤算法的核心,如果缺少合理的策略,則算法產(chǎn)生的假設(shè)數(shù)目、目標數(shù)以及需要處理的數(shù)據(jù)量會非常巨大。確定合理策略進行假設(shè)生成和刪除,是MHT 算法的關(guān)鍵步驟。
1.2 改進的m-最優(yōu)MHT算法
m-最優(yōu)MHT 算法是在MHT 算法基礎(chǔ)上的優(yōu)化算法,其核心思想是在得到的量側(cè)數(shù)據(jù)中去除低概率假設(shè),只保留m 個最優(yōu)假設(shè),假設(shè)t時刻有m(t)個假設(shè),則下一時刻假設(shè)數(shù)目限定在m(t+1)個內(nèi),m 是可變參數(shù),可以給定,也可以自適應(yīng)選擇。該算法的主要步驟為[8]:①對先驗?zāi)繕藸顟B(tài)和初始假設(shè)生成進行初始化;②接收新的目標量測數(shù)據(jù)和干擾數(shù)據(jù);③對目標進行更新;④形成新的聚類,聚類由可能的航跡以及與航跡關(guān)聯(lián)的量測組成,若前時刻任意兩聚類與當前量測相關(guān),則形成超聚類;⑤計算每個假設(shè)的概率,進行假設(shè)目標和量測更新,形成新的假設(shè)集;⑥用m-最優(yōu)算法對關(guān)聯(lián)假設(shè)進行刪減,去掉小概率假設(shè),保留最優(yōu)的m 個假設(shè);⑦簡化聚類中的假設(shè)矩陣,對于目標概率為1的確定為目標,并創(chuàng)建新的聚類。
m-最優(yōu)MHT 算法存在的主要問題是:當目標和干擾較大時,在聚簇過程中將產(chǎn)生高維矩陣,使生成的假設(shè)數(shù)量增多,導(dǎo)致假設(shè)的刪減過程也非常復(fù)雜,算法實現(xiàn)時間變長,本文研究了雷達目標和干擾較大時,從聚矩陣維數(shù)下降的角度提出了m-最優(yōu)MHT 算法的改進算法。由于新目標的不斷加入,m-最優(yōu)MHT 算法引入Bar-shalom 聚矩陣后的行向量維數(shù)變得很高,而如果將對已知目標的跟蹤和新航跡的起始分開進行考慮,對目標跟蹤中所產(chǎn)生的新目標起始過程單獨計算,則目標跟蹤過程中的矩陣維數(shù)將下降,簡化為m× (n+2),新目標均處于矩陣的一列。這樣在不影響假設(shè)矩陣量的同時,算法執(zhí)行時間將大幅縮減,對工程實現(xiàn)有較大作用。
2 秩K 融合規(guī)則
網(wǎng)絡(luò)化雷達采用決策融合結(jié)構(gòu)對雷達進行控制,秩K融合規(guī)則是決策融合模型采用的融合規(guī)則[9]。其具體規(guī)則為:假設(shè)網(wǎng)絡(luò)化雷達系統(tǒng)有N 個接收站,如果至少有K 個接收站判斷目標存在,則雷達認為目標存在。如果K=1,對應(yīng) “or”規(guī)則,如果K=N,則對應(yīng) “and”規(guī)則。秩K 融合規(guī)則的判決流程如圖2所示。
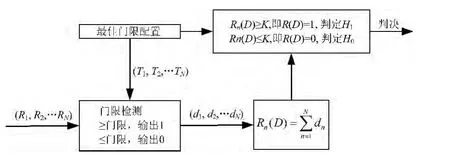
圖2 秩K 融合規(guī)則的判決流程
假設(shè)雷達系統(tǒng)網(wǎng)內(nèi)有N 個接收站,每個接收站對目標的探測是否存在做出硬判決。硬判決指檢測器判決結(jié)果為0或1,假設(shè)判決結(jié)果為目標存在,則表示為H1,如果判決結(jié)果為目標不存在則表示為H0,則第n 個接收站的決策值dn表述如下

其中n= (1,2…N)。
接收站將自身判決結(jié)果輸入網(wǎng)絡(luò)化雷達融合中心,融合中心根據(jù)局部判決結(jié)果形成的判決向量產(chǎn)生全局判決D0,表示如下

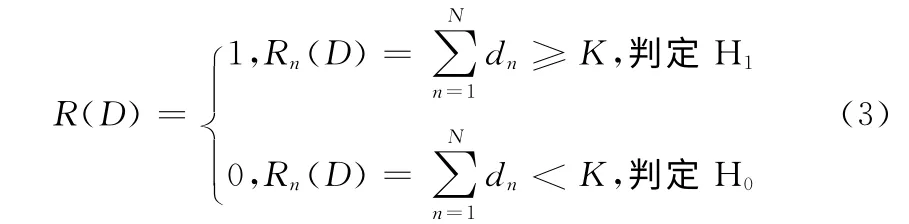
綜上,秩K 融合判決規(guī)則如下式此時,雷達網(wǎng)絡(luò)中心對目標的融合發(fā)現(xiàn)概率為

式中:S1——各接收機判決為 “1”的向量D 集合,S0——各接收機判決為 “0”的向量D 集合,Pdn——第n 個接受機對目標的發(fā)現(xiàn)概率。此時,網(wǎng)絡(luò)化雷達對目標的虛警概率表示如下

式中:Pfn——第n個接受機對目標的虛警概率。
由上式可以看出,參數(shù)K 的大小直接決定著判決準備準則,進而影響雷達系統(tǒng)的發(fā)現(xiàn)概率和虛警概率,所以參數(shù)K 的選擇非常重要。下面分析K=1和K=N 的兩種情況,當K=1時,只要有1個雷達接收機發(fā)現(xiàn)目標,則融合系統(tǒng)即認為發(fā)現(xiàn)了目標,此時,雷達系統(tǒng)的融合發(fā)現(xiàn)概率和虛警概率為

據(jù)上式分析,K=1時,較低的單接收機發(fā)現(xiàn)概率即可得到比較高的融合發(fā)現(xiàn)概率。
進一步分析融合虛警概率,假設(shè)各接收機的虛警概率均相同為Pfi=Pf0,i=1,2,…N。
則融合虛警概率為

可見融合系統(tǒng)的虛警概率是單個接收站虛警概率的N倍。虛警概率大幅提高。
當K=N 時,所有雷達接收機發(fā)現(xiàn)目標,則融合系統(tǒng)才認為發(fā)現(xiàn)了目標,此時,融合系統(tǒng)的目標發(fā)現(xiàn)概率和虛警概率分別為

由此可見,K=N 時,融合系統(tǒng)可以得到較小的虛警概率,而同時,發(fā)現(xiàn)概率也較小。
網(wǎng)絡(luò)化雷達系統(tǒng)經(jīng)信息融合后得到的合理結(jié)果應(yīng)該是:融合發(fā)現(xiàn)概率大于單接收機的發(fā)現(xiàn)概率,而融合虛警概率小于單接收機的虛警概率,所以對于秩K 的選擇非常關(guān)鍵,在工程中應(yīng)分別計算不同K 值對應(yīng)的發(fā)現(xiàn)概率和虛警概率,進而獲得最佳K 值。
3 干擾識別
本文研究分布式干擾下的雷達抗干擾算法,分布式干擾與集中式干擾具有不同的特性,雷達對這兩種干擾采用的抗干擾算法也有所不同,根據(jù)分布式干擾與集中式干擾空間距離差的不同可以判別干擾屬于哪一種[10],如果干擾源識別為分布式干擾,則利用文中提出的算法,進行雷達目標的抗干擾識別。
如圖3所示,J0為集中式干擾機,R1、R2、R3為三部雷達,J1、J2、J3為分布式干擾機,分布式干擾機由于功率較小,只能干擾距離較近的雷達,J0作為大功率干擾機,可以同時干擾R1、R2、R3。設(shè)雷達的干擾源方向角為θ^i,i,j=1,2,3,則以雷達為頂點,按照方向角角度做直線,兩兩直線的交點為oij,焦點坐標為(xij,yij)
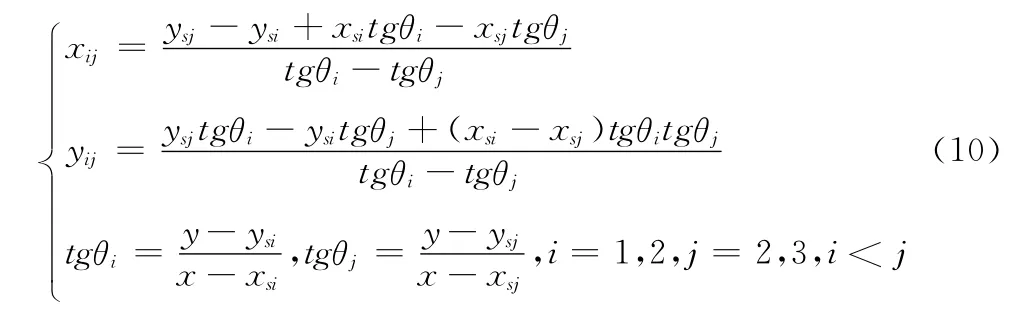
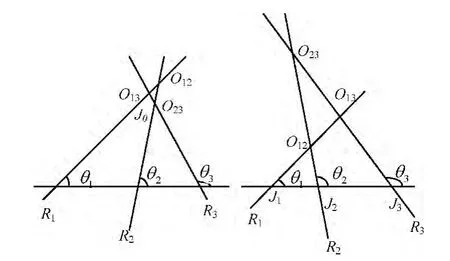
圖3 雷達及干擾
該點的互協(xié)方差為
其中l(wèi)=3,xsji=xsj-xsi,ysji=y(tǒng)sj-ysi(xij,yij),(xil,yil)兩點之間的距離差為

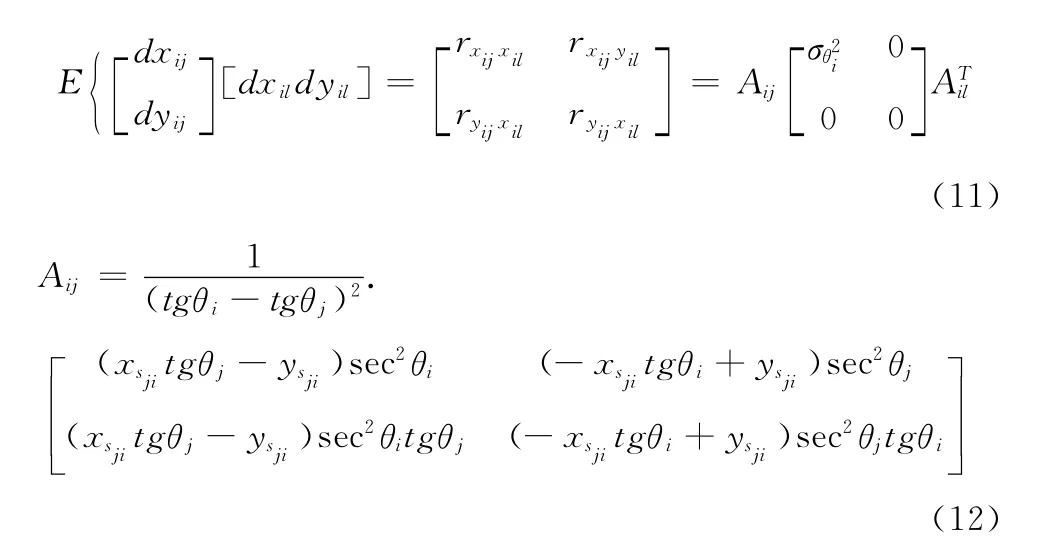
則距離差的均值和方差如下
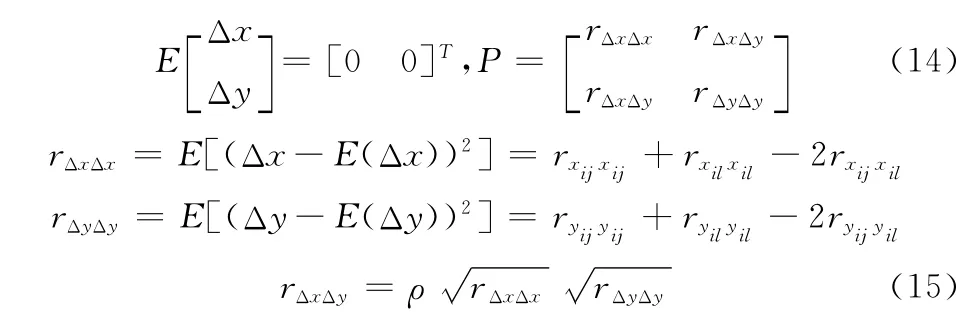
式中:ρ——Δx 與Δy 之間的相關(guān)系數(shù)。

式中:G——χ2檢驗中顯著性水平的門限值,如果結(jié)果為1,則表示為集中式干擾,若為0則表示干擾為分布式干擾。
4 基于MHT的網(wǎng)絡(luò)化雷達抗干擾算法
基于以上敘述及理論,本文提出了基于MHT 的網(wǎng)絡(luò)化雷達抗干擾算法,主要步驟為:
步驟1 通過干擾判斷方法,判斷當前雷達環(huán)境中的干擾為分布式干擾還是集中式干擾,如果判斷為分布式干擾則進行步驟2。
步驟2 采用本文改進的m-最優(yōu)MHT 算法,利用Bar-Shalom 聯(lián)合數(shù)據(jù)互聯(lián)濾波算法計算每一個事件概率。
步驟3 用文中第2部分所述的秩K 融合準則計算融合后的概率,進而判斷每一個目標的狀態(tài)。
5 仿真結(jié)果及分析
5.1 仿真思路及數(shù)據(jù)
建立化雷達仿真模型,建立干擾模型,對網(wǎng)絡(luò)化雷達進行分布式干擾,由于受到網(wǎng)絡(luò)分布式干擾,網(wǎng)內(nèi)的雷達無法同時對目標完成連續(xù)探測,但網(wǎng)絡(luò)化雷達的各個分雷達會在不同時間段達成對目標的探測。首先構(gòu)造一條航跡,在網(wǎng)絡(luò)化雷達探測探測中,每個雷達會各自獲得一組點跡,運用本文所述算法合成軌跡,進行分析。
仿真具體參數(shù)設(shè)置如下:雷達參數(shù):數(shù)量3 個,位置(km):(0,350),(0,0),(200,500),雷達天線的發(fā)射及接收增益為30db,雷達波長為0.1m,副瓣增益為-5db,雷達掃描周期為1s,發(fā)射功率300kw。干擾機參數(shù):數(shù)量5個,位置(km): (100,300), (250,150), (0,200),(500,400),(30,450),天線增益22db,干擾功率10w 帶寬10Mhz,干擾機功率損耗2db。目標參數(shù):數(shù)量2個,做勻速直線運動,目標RCS為10m2雜波為正態(tài)分布。
5.2 仿真結(jié)果分析
從仿真結(jié)果圖4中可以看出,應(yīng)用本文算法,網(wǎng)絡(luò)化雷達克服了分布式干擾下,雷達存在部分盲區(qū),航跡不連續(xù)現(xiàn)象,最后融合得到的航跡精度較高,且算法運行時間較短,從圖5中可以看出算法的均方根誤差較小,在可接受的范圍。本文算法能夠有效對抗分布式干擾造成的航跡不連續(xù)、目標丟失的問題,是一種有效的雷達抗干擾算法。
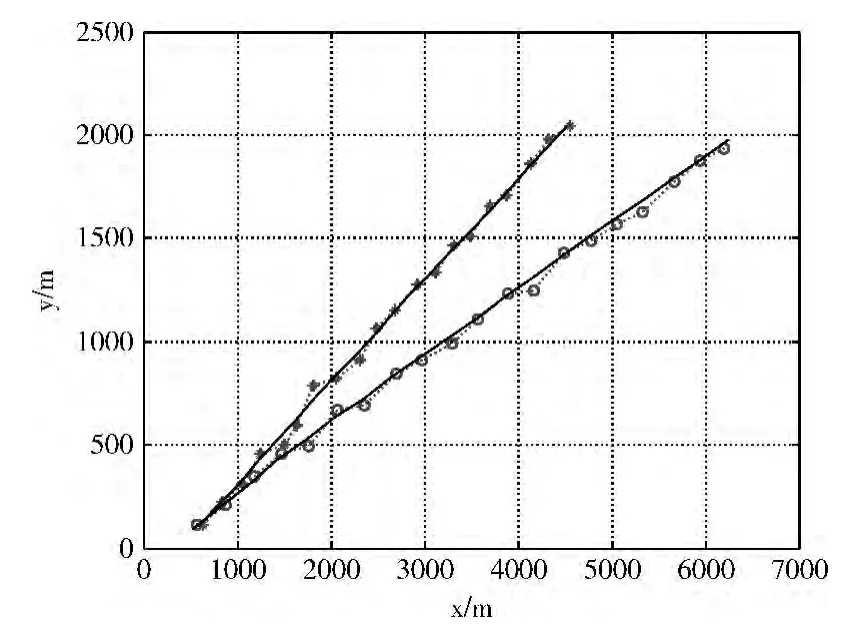
圖4 仿真結(jié)果
6 結(jié)束語
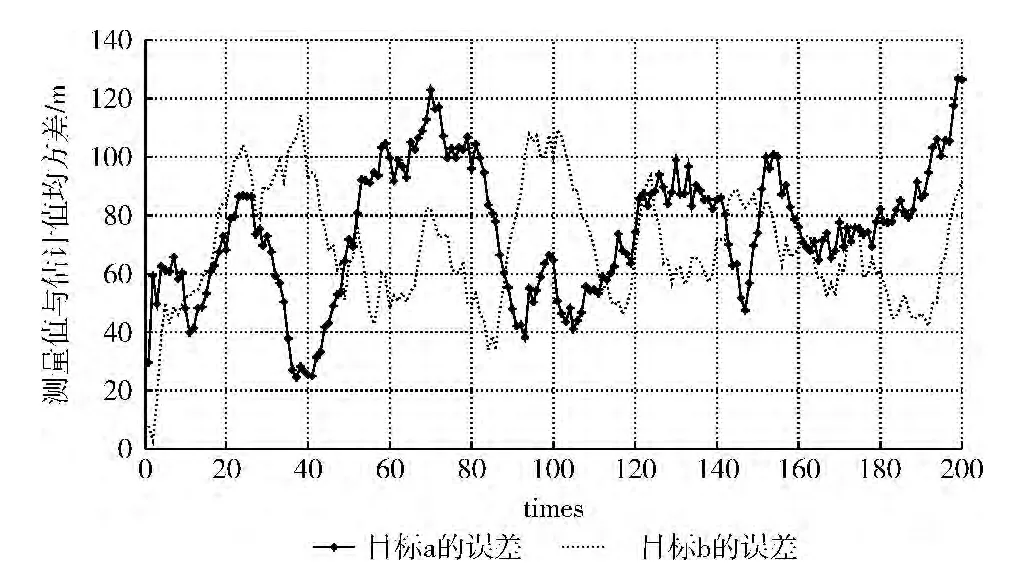
圖5 均方根誤差
分布式干擾具有設(shè)備簡易、干擾范圍廣等特點。分布式干擾下,單雷達目標檢測概率下降、檢測性能變差、航跡不連續(xù)。基于此,本文研究了分布式干擾下網(wǎng)絡(luò)化雷達抗干擾算法,該算法基于改進的MHT算法與秩K 融合規(guī)則進行目標的檢測,首先針對傳統(tǒng)MHT 算法計算量大不利于工程實現(xiàn)的特點,研究了降低算法復(fù)雜度的方法,然后利用秩K準則計算融合后的目標檢測概率并實現(xiàn)目標航跡檢測。仿真結(jié)果表明了本文算法在雷達抗分布式干擾中的有效性。
[1]GUO Jianming,TAN Huaiying.Overview of radar technology development and initial study on the 5th generation of radar[J].Modern Radar,2012,34 (2):1-7 (in Chinese).[郭建明,譚懷英.雷達技術(shù)發(fā)展綜述及第五代雷達初探 [J].現(xiàn)代雷達,2012,34 (2):1-7.]
[2]LOU Xiaoxiang,ZHENG Hao.Algorithm based on multiple hypothesis target tracking [J].Command Information System and Technology,2012,3 (6):36-38 (in Chinese). [樓 曉祥,鄭浩.基于多假設(shè)目標跟蹤算法 [J].指揮信息系統(tǒng)與技術(shù),2012,3 (6):36-38.]
[3]CHEN Chunfeng,LUO Wencheng.Selected filter of MHT method for complex environment [J].Computer Engineering and Applications,2013,49 (15):229-232 (in Chinese).[陳春風(fēng),駱文成.復(fù)雜條件下MHT 方法的濾波器選擇 [J].計算機工程與應(yīng)用,2013,49 (15):229-232.]
[4]FANG Mingxing,WANG Jiegui,YANG Yongjing.Evaluation on netted radar detection performance in the distributed jamming of multi-false target[J].Mordern Defence Technology,2014,42 (3):135-141 (in Chinese).[房明星,王杰貴,楊永晶.分布式多假目標干擾下組網(wǎng)雷達監(jiān)測性能分析 [J].現(xiàn)代防御技術(shù),2014,42 (3):135-141.]
[5]REN Bo,SHI Longfei,WANG Hongjun,et al.Investigation on of polarization filtering scheme to suppress GSM interference in radar main beam [J].Journal of Electronics &Information Technology,2014,36 (2):460-463(in Chinese).[任博,施龍飛,王洪軍,等.抑制雷達主波束內(nèi)GSM 干擾的極化濾波方法研究 [J].電子與信息學(xué)報,2014,36 (2):460-463.]
[6]LI Shizhong,WANG Guohong,BAI Jing,et al.A tracking algorithm with multiple probabilities hypothesis for radar network point target in the presence of suppressive jamming [J].Journal of Xian Jiaotong University,2012,46 (10):101-105(in Chinese).[李世忠,王國宏,白晶,等.壓制干擾下雷達網(wǎng)點目標概率多假設(shè)跟蹤算法 [J].西安交通大學(xué)學(xué)報,2012,46 (10):101-105.]
[7]RAO Shijun,JIANG Ning,ZHANG Yunwen.Optimization and simulation of multiple hypotheses target algorithm tracking based on structures branching [J].Computer Simulation,2013,30 (1):18-21 (in Chinese).[饒世鈞,姜寧,張云雯.基于結(jié)構(gòu)多假設(shè)目標跟蹤算法優(yōu)化與仿真 [J].計算機仿真,2013,30 (1):18-21.]
[8]YANG Rennong,CHEN Yan,WU Meng,et al.A tentative study on the approaches to track initiation [J].Computer En-gineering & Science,2012,34 (2):176-179 (in Chinese).[楊任農(nóng),陳巖,鄔蒙,等.M-最優(yōu)假設(shè)組合航跡關(guān)聯(lián)算法[J].計算機工程與科學(xué),2012,34 (2):176-179.]
[9]HAN Guoxi,HE Jun,QI Jianqing.Fused detection probability model of NRCS based on rank k criterion [J].Journal of Naval University of Engineering,2014,26 (1):65-69 (in Chinese).[韓國璽,何俊,祁建清.基于秩K 準則的網(wǎng)絡(luò)雷達對抗系統(tǒng)融合發(fā)現(xiàn)概率計算模型 [J].海軍工程大學(xué)學(xué)報,2014,26 (1):65-69.]
[10]XU Haiquan,WANG Guohong,GUAN Chengbin.Target tracking technique for radar network under the distributed jamming [J].Acta Armamentarii,2011,32 (6):765-769(in Chinese).[徐海全,王國宏,關(guān)成斌.分布式干擾下雷達網(wǎng) 的 目 標 跟 蹤 技 術(shù) [J].兵 工 學(xué) 報,2011,32 (6):765-769.]
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
數(shù)學(xué)年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(shù)(2021年4期)2021-07-13 08:58:28
無線電通信技術(shù)(2021年3期)2021-06-08 03:33:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
福利中國(2015年4期)2015-01-03 08:03:38