基于能量函數的故障診斷方法與實驗
2015-12-23 00:58:34周雪梅
計算機工程與設計 2015年5期
周雪梅,李 輝,潘 多
(1.四川工商職業技術學院 信息工程系,四川 都江堰611830;2.四川大學 計算機學院,四川 成都610065)
0 引 言
目前,有關運動系統執行器信號分析及其故障診斷方法的研究已有很多。文獻 [3]采用H ∞和狀態觀測器對執行器故障進行診斷和隔離,其中用到了動力學模型、位置殘差信號;文獻 [4]則基于動力學模型,采用自適應濾波的方法進行執行器故障的診斷;而Isermann在其研究工作[5]中則總結了基于模型的系統故障診斷方法。
通過分析可以發現,上述方法都是基于運動系統的動力學模型、位置等信號進行的驅動器故障診斷。算法復雜、時變性較強,而且診斷算法的物理意義不明確,不利于實際應用。在這方面,文獻 [6]采用測得的電機電流信號對刀具的斷裂故障進行了診斷,具有較好的實際應用意義。而實際的運動系統中的驅動器中一般會提供用于監視用的力矩信號或者與力矩有直接關系的電機電流信號。利用此信號可以節省運算資源和傳感器資源。
本文利用一般運動控制系統中冗余的力矩監視信號,研究不同類型故障診斷的方法。即利用物理意義明確的能量函數進行驅動系統故障的監視,具有方法簡單、應用方便、準確可靠的優點。
1 問題描述
1.1 驅動系統故障及特點分析
從硬件構成上,包括各類數控機床、機器人等,一般數控系統可認為由控制器、驅動器、伺服電機編碼器等幾個關鍵環節構成[7]。其間的關系如圖1所示。所示系統中,驅動器是弱電控制系統與強電執行機構的橋梁。即所有與電機相關的系統執行過程狀態都通過驅動器反饋給控制子系統。包括電壓、電流、位置等。驅動器生產商也會給控制子系統以開關或模擬信號的形式提供給用戶,如:Panasoic電機驅動器、Maxon直流電機驅動器、Dynaserv直接電機驅動器等。這些驅動器具有如下特點:
(1)電流環和電壓環已經集成于驅動器內部,之所以再提供這些信息,主要為一般監視控之用,往往含有大量的干擾信號;
(2)在系統運行過程中,只有超出設定的電壓或電流輸出才會有停機報警;而對于本文中引言部分總結出的故障,即使發生了系統也會繼續運行,不會給與相應報警;
(3)驅動器中的監視功能不能分辨出是哪類故障的發生。

圖1 一般數控系統構成
本文即基于驅動器中冗余的力矩監視信號對上述各類故障進行監控,為控制決策系統提供準確信息。
1.2 驅動系統故障的發生機理分析
運動系統中,執行機構的種類很多,按照與環境的關系大體可以分為兩類:不與環境發生接觸和與環境發生接觸[8]。弧焊和焊接機器人屬于無接觸機器人。此類機器人在運動時,如果與慣量較小的障礙物相撞,那么由于系統都具有一定的魯棒性,末端執行軌跡受影響較小,但此時,電機為了產生相應的轉速,驅動力肯定要發生變化。一般來講,障礙物的剛度越大、慣量越大,力矩信號變化越劇烈。而碼垛機器人、數控機床、人機交互機器人等則屬于后者[9]。此類機器人與環境的接觸是不可避免的,如對于鉆床,加工件氣泡的存在,使得相同速度下,電機輸出力矩會變小;刀具發生嚴重損傷、甚至斷裂的時候,電機的輸出力矩也會發生突變。
上述變化,必然引起電機驅動裝置對輸出電流的調整。反映到電機驅動器上,轉矩監視信號 (torque monitor output)就會發生相應變化。所以說,驅動器轉矩監視信號包含有與電機相關的所有信息。可以通過數據處理的方法,對此信號進行分析得到這些不同類型的系統故障。
2 基于能量函數的運動系統故障監測方法
2.1 故障診斷系統的構成
近年來,故障診斷方法的研究有了大量的研究成果,但是由于物理意義不明確、運算繁雜等原因,沒能得到廣泛的應用。Kaiser[10]在1990年提出了一種近似能量函數,克服了以前只用幅值或頻率來描述信號能量大小的片面性,而且有利于檢測信號能量的變化特性,并得到了大量的研究和應用,在文獻 [11]中,該思想得到了進一步的完善。
對于一般數控系統,由于其力矩監視信號可以被直接獲得,根據上述思路,可構建故障診斷系統如圖2 所示。圖中,A/D 轉換為高速數據采集,信號分析可以采用多種方法,本文中采用具有清晰物理意義的新穎能量函數,對故障歸類得到C1,C2,…Cn,并從n 類故障中確定某一種故障的發生。

圖2 基于力矩信息的故障診斷系統的構成
但是,上述應用方法中,一般需要額外的傳感器進行信號的采集,加大了系統的復雜性。本文基于上述分析,利用驅動器中冗余的力矩監視信息對系統的運行狀況進行監控。
2.2 基于能量函數進行故障診斷
文獻 [10]利用牛頓定律得到表征某信號能量的結論:
如果信號的采樣頻率是其最高頻率的八倍以上,那么對信號能量的測量可以表示為

式中:xn——對信號在n時刻的采樣,En——算法的輸出,即能量的表征量。
由式(1)可知:一方面,此算法具有對稱性,對采樣點求反,不會影響結果;另一方面,因為沒有除運算,此法允許信號過零;除此之外,算法的簡單性大大方便了使用。
對于驅動系統信號,利用能量算子進行能量運算的方法表示如下

式中:n——采樣點。
由于能量函數E[T(n)]<0或E[T(n)]>0都可能存在,所以在故障閾值L 下,故障未發生的條件為

多步平滑非線性能量算子 (SPNEO)

上式中,系數項

其中,p 為延遲的步數。
式(2)和式 (4)可以認為是低通濾波器,通過對c和p 的選擇可以實現對不同頻段信號的濾波。
2.3 應用過程的關鍵點
方法應用過程中的關鍵點可以概括如下幾點:
(1)信號的采樣頻率應該足夠高,大于信號頻率的八倍;
(2)選擇合適的c 和p 的值,用于診斷不同類型的故障;
(3)選擇合適的閾值,作為準確判斷故障的發生的準則。
2.4 故障發生的診斷步驟
根據上述分析,可以得到利用非線性能量函數進行故障監視與診斷的步驟如圖3所示。

圖3 故障診斷流程
在圖3中,改變L,c和p 的值是為了使得能量函數具有對各頻段的分析能力,這也是一個掃描故障類型的過程;當完成一次掃描后,就可以采集新數據,進行下一個循環的運算。
3 仿真驗證與應用
本文采用了軟件仿真與實際應用兩種思路,驗證上述方法有效性,并在應用的過程中給出應用此種方法的關鍵點。
3.1 軟件仿真實驗
本研究中的軟件仿真在Matlab7.1 環境中進行,信號的生成過程采用Simulink框圖形式,信號分析在環境m 函數中進行。
模擬轉矩信號的基本信號為

在此信號上疊加方差為0.0001,均值為0的白噪聲信號作為干擾。為了模擬故障的發生,在5s時刻,疊加幅值為0.2單位,寬度為0.05s的突變故障脈沖信號。
在采樣周期為5 ms時得到模擬轉矩時間序列T(n),設其長度為N。最終產生的信號曲線如圖4所示。
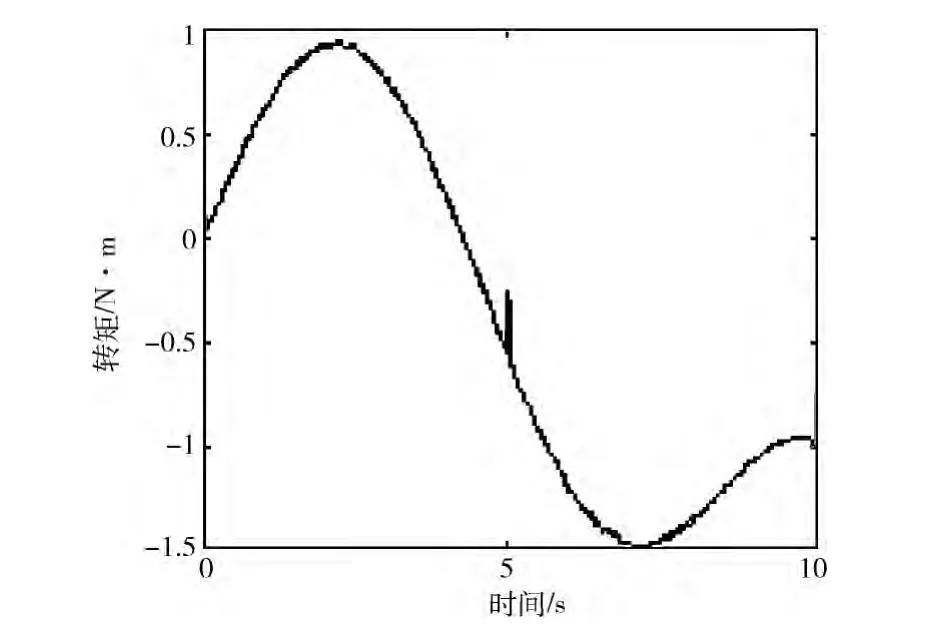
圖4 模擬故障信號
在能量算子式 (2)中,由于需要一步向前和向后的信號,所以會使得信號的長度縮短。由于采樣時間較短,這一方可以用零能量來替換,另外也可以將初始點和結尾點舍去,本研究中采用了舍去的處理方法。
根據上文算法,在Matlab7.1中編寫m 函數,運算得到能量序列E [T(n)],長度為N-2。通過與閾值L 的比較,可以診斷出5s時刻突變故障的發生。將能量序列繪制如圖5所示。

圖5 基于NEO 的能量函數
仿真結果表明,一步能量算子能以給定閾值為參考,有效診斷突變故障的發生。
3.2 應用實驗
以X-Y-Z數控運動平臺在運動過程中撞擊質量為25kg的靜止剛體 (鋼板)過程為研究對象,在系統運動過程中采集驅動器冗余力矩監視信號,并進行分析。圖6是平臺實物照片。

圖6 X-Y-Z平臺實驗裝置
力矩信號由此運動控制系統中松下交流伺服電機驅動器中的力矩監視信號 (torque monitor output)采集得到,采樣周期為0.002s。此信號在一般的運動控制系統中只作為力矩監視之用,甚至閑置。實時的信號采集與運算所采用的軟硬件環境分別為加拿大Quanser公司的Wincon軟件和多功能Q8運動控制板卡。
通過對撞擊剛體情況下與無撞擊情況下力矩監視電壓信號的采集與記錄,進行繪制后得到圖7,圖中實線為存在外部撞擊時的力矩信號。對式 (2)的應用結果為圖8,當式(6)中p=1,則得圖9,經過式 (4)得到多步平滑能量函數值構成的能量序列Esp[T(n)]將其繪制得到曲線如圖10所示,此時,c=70,p=50。

圖7 力矩曲線
由圖8~圖10可以清晰準確判斷出故障發生的狀態以及時刻。
同時,通過上述對兩種不同能量函數的應用可以總結為以下幾點:
(1)對于突變故障的發生,由于帶來信號能量的突變,可以通過一步能量函數隊故障的發生進行準確的診斷,同時運算量也最小;

圖8 一步能量算子運算結果

圖9 僅平滑算子結果

圖10 SPNEO 運算結果
(2)對于變化較緩慢的故障,由于能量的變化較慢,適于采用多步滑動能量算子進行故障的探測,運算量隨著信號變化的趨緩而增大;
(3)居于兩者之間的故障信號變化,可以采用單步滑動能量算子進行探測;
(4)采用兩種不同的能量函數進行運算時,采用的能量函數閾值是不同的,且遵循的原則是:窗口越大,滯后時間越長,閾值也越大。
4 結束語
本文提出了基于能量函數進行故障診斷與類型分類的方法。給出了基于能量函數的故障診斷原理,分析了應用過程中的關鍵點,并提供了詳細的診斷過程流程圖。通過基于Matlab的軟件仿真以及以數控運動平臺為對象的診斷進行了實驗,實驗結果表明了該方法的有效性。同時,對不同能量函數及其參數的選擇進行了詳細的分析,給出了進行故障診斷的指導性原則。本文中提出的方法對于數控機床、多自由度機器人系統、人機交互系統具有很好的利用價值。
[1]Ollero A,Boverie S,Goodall R,et al.Mechatronics,robotics and components for automation and control-IFAC milestone report [J].Annual Reviews in Control,2012,30 (1):41-54.
[2]Torgny Brogardh.Present and future robot control development-an industrial perspective [J].Annual Reviews in Control,2011,31 (1):69-79.
[3]De Luca A,Mattone R.An identification scheme for robot actuator faults[J].IEEE/RSJ International Conference on Intelligent Robots and Systems,2013,8 (6):1127-1131.
[4]Alessandro De Luca,Raffaella Mattone.An adapt-and-detect actuator FDI scheme for robot manipulators[J].IEEE International Conference on Robotics & Automation,2011,4 (2):4975-4980.
[5]Rolf Isermann.Model-based fault-detection and diagnosis-sta-tus and applications [J].Annual Reviews in Control,2012,29 (1):71-85.
[6]Li Xiaoli,Du R,Berend Denkena,et al.Tool breakage monitoring using motor current signals for machine tools with linear motors [J].IEEE Transactions on Industrial Electronics,2010,52 (5):1403-1408.
[7]HU Yabo,WU Yawen.Situation and development of CNC lathes[J].Machine & Hydraulics,2011,7 (5):4-6 (in Chinese). [胡亞波,吳亞文.我國數控車床的現狀與發展[J].機床與液壓,2011,7 (5):4-6.]
[8]DU Kunmei,LI Tiecai.Flywheel torque servo motor control system [J].Electric Machines and Control,2011,5 (2):119-120(in Chinese).[杜坤梅,李鐵才.慣性飛輪電機力矩伺服控制系統[J].電機與控制學報,2011,5 (2):119-120.]
[9]Lames F Kaiser.On a simple algorithm to calculate the‘energy’of a signal[J].International Conference on Acoustics,Speech and Signal Processing,2010,11 (1):381-384.
[10]Petros Maragos,James F Kaiser,Thomas F Quatieri.On amplitude and frequency demodulation using energy operators[J].IEEE Transactions on Signal Processing,2013,41(4):1532-1550.
[11]WANG Aiping.Model reference adaptive methods in non-linear actuator fault diagnosis [J].Control and Decision,2011,16 (4):587-590 (in Chinese). [王愛平.參考模型自適應方法在非線性執行器故障診斷中的應用 [J].控制與決策,2011,16 (4):587-590.]
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21