手機與ZigBee結合的城市停車系統
2015-12-23 00:52:54舒華文
計算機工程與設計 2015年6期
舒華文,周 鵬
(1.中石化勝利油田有限公司 濱南采油廠,山東 濱州256606;2.中國石油大學 (華東)信息與控制工程學院,山東 青島266580)
0 引 言
現有城市智能停車系統采用的基本架構類似,大致由信息采集、信息傳輸、中央管理和信息發布4個子系統組成[1-3]。信息采集子系統負責采集車位當前是否被占用、駛入及駛出停車場的車輛數目等相關數據;信息傳輸子系統用于將采集到的信息傳輸給中央管理子系統,以及將中央管理子系統發布的信息傳輸給各類顯示裝置,通信方式多采用GPRS、CDMA、3G 等移動通信方式;中央管理子系統是整個架構的核心,它對信息采集子系統送來的信息經過綜合處理后,再將這些信息通過信息傳輸子系統及時輸送給各類顯示裝置[4,5]。
上述架構的共同點是需要建設并維護一個城市級的管理控制中心,導致系統的建設和運營成本較高。信息采集、信息發布兩個子系統與管理控制中心間的通信多采用GPRS、CDMA、3G 等方式,需由運營部門長期繳納不菲的移動通信費用。此外,駕駛者在駕駛過程中一直只是被動接受系統所提供的信息,缺乏與系統的主動交互。
為解決上述不足,本文提出一種用戶智能手機與停車場ZigBee網絡相結合的架構。
1 系統架構
系統由部署在各停車場的ZigBee網絡和用戶車輛上隨身攜帶的智能手機兩大類部分組成。每個停車場所部署的ZigBee網絡,又由一個中心結點、若干個路由器結點以及更多數量的終端結點組成。其中的終端結點又包括全功能結點和精簡功能結點兩種。精簡功能結點的優點是成本低,全功能終端結點的優點是通信范圍內的兩個結點間可直接進行點到點的通信。每個終端結點又都分別連接一個車位狀態檢測傳感器。圖1給出了系統的總體架構。
整個系統的大致工作流程是:
(1)所有終端結點定期采集車位狀態檢測傳感器獲取的車位狀態信息。當車位狀態發生變化時,通過路由器結點傳給中心結點并在其嵌入式數據庫中進行存儲。
(2)當汽車行駛至某地時,用戶利用語音輸入等方式提出尋找車位的請求,智能手機軟件根據車輛的當前位置確定最優的停車場。
(3)智能手機軟件與最優停車場Zigbee網絡中的中心結點進行GPRS/CDMA/3G 等方式的通信,中心結點查詢當前的車位狀態數據庫,運行確定最優停車位的算法,將最優車位的信息反饋給智能手機。
(4)智能手機進行路徑規劃,將車輛引導至最優車位。

圖1 系統的總體架構
在上述架構中,運營部門無需建設城市控制中心,也無需長期繳納停車場到城市控制中心,以及城市控制中心到各級顯示裝置的移動通信費用。只有用戶發出停車請求時,停車場ZigBee網絡的中心結點才和用戶進行GPRS/CDMA/3G 等方式的通信,所產生的少量費用由用戶進行付費。此外,在上述架構中,用戶通過自己的智能手機可與系統進行良好的交互。
2 硬件設計
ZigBee網絡中包括中心結點、路由器、終端三類結點。三類結點的電路中都應包括ZigBee處理器及其外圍電路,以及ZigBee射頻功放、USB轉串口、JTAG 調試等模塊。
終端結點需配備車位狀態檢測傳感器。考慮到可能缺乏供電條件或布線困難、布線量大等原因,終端結點設計為采用電池供電,因此應配備電量監視模塊以便在需要時及時更換電池。
因為需要維護車位狀態數據庫,中心結點應額外配備嵌入式處理器及其外圍電路,當數據量較大時還應外接E2PROM。為和用戶手機通信,中心結點應配備GPRS/CDMA/3G 通信模塊。對于路邊停車區域,考慮到可能缺乏供電條件,對于路由器結點和中心結點也應支持電池供電,同時配備電量監視模塊。另外,如果希望不通過上位機就可直接操作中心結點,還需配備觸摸屏。
圖2給出了終端結點的硬件,與路由器結點類似,只是無需連接車位狀態檢測傳感器。
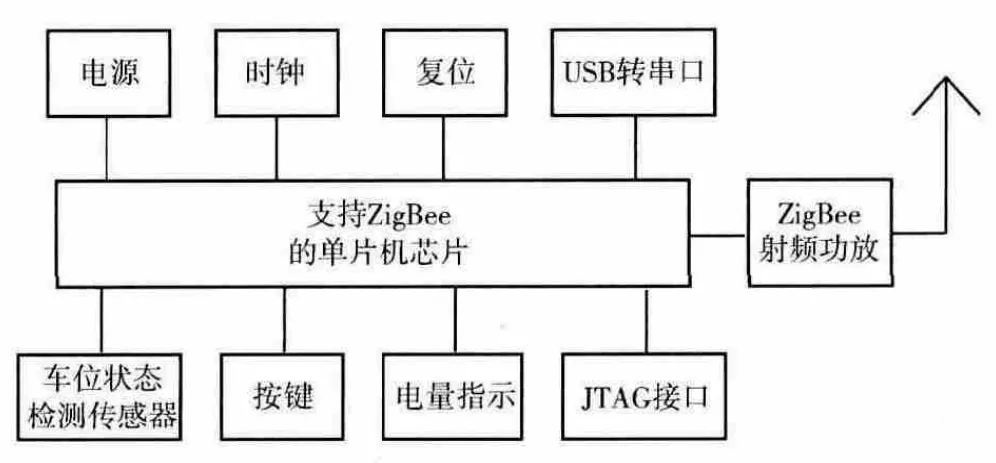
圖2 終端結點的硬件
中心結點的硬件電路包括嵌入式處理器及其外圍電路、ZigBee處理器及其外圍電路兩部分。這兩部分之間可通過串口進行通信。
圖3給出了中心結點嵌入式處理器部分的硬件。中心結點ZigBee處理器部分的硬件與圖2類似,只是無需連接車位狀態檢測傳感器。
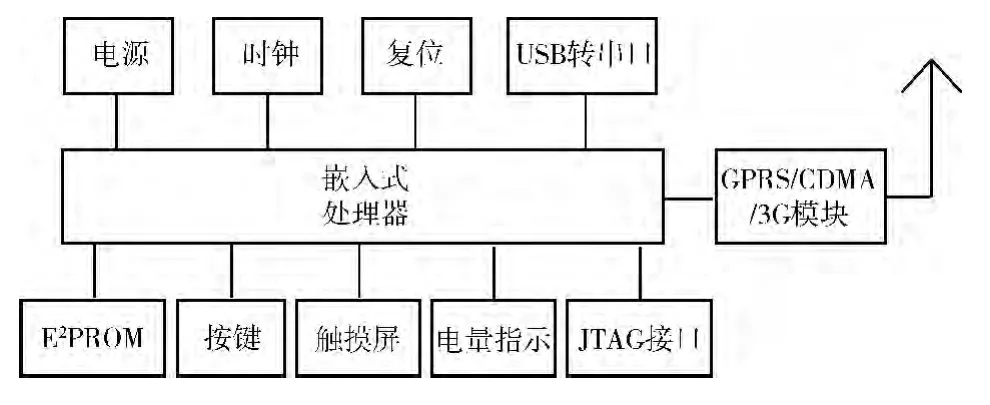
圖3 中心結點嵌入式處理器部分的硬件
車位狀態檢測傳感器的選取和低功耗設計是系統硬件設計的兩大關鍵。
目前常用的車位檢測方法有超聲波感應技術[6]、紅外探測技術、感應線圈技術[7]、視頻檢測技術[8]、地磁檢測技術等[9]。其中,超聲波感應技術通常需要在車位上方安裝傳感器,一般僅適用于部分室內停車場,且成本較高;紅外探測技術相對成熟,但比較容易會受到光源、熱源等的干擾而引起誤判;感應線圈技術的檢測精度較高,可靠性好,但安裝維護復雜,會對路面造成破壞;視頻檢測技術直觀可靠,但數據量大,檢測的實時性差,特別是會受到灰塵、光線不足、氣候條件差的影響;地磁檢測技術是基于磁阻傳感器的車位檢測技術,具有尺寸小、安裝方便、對非鐵磁性物體無反應、可靠性高等特點,目前受到國內外的廣泛重視。綜上分析,車位狀態檢測傳感器選用霍尼韋爾公司的HMC5883L地磁傳感器。
為保證系統的低功耗,主要芯片的選型非常關鍵。Zig-Bee處理器芯片選用TI公司的CC2530芯片。CC2530具有Idle、PM1、PM2、PM3等多種功率控制模式,其電流消耗可分別低至24 mA、0.2mA、1μA、0.4μA[10]。ZigBee射頻功放芯片選用TI公司的CC2591芯片。CC2591在將輸出功率提高22dBm、接收靈敏度提高6dBm 的同時,在Idle、PM1、PM2、PM3模式下增加的消耗電流分別不超過4mA、0.05 mA、1μA、0.05μA[10]。中心結點的微控制器選用恩智浦公司的LPC11C14芯片。該芯片基于Cortex-M0內核,在功率控制方面具有睡眠模式、深度睡眠模式和深度掉電模式等,其電流消耗可分別低至2mA、6μA、240nA[11]。
3 軟件及算法設計
3.1 車位數據采集過程
各停車場ZigBee網絡的三類結點平時相互配合,對停車場內所有車位的狀態進行定時采集。為降低功耗,終端結點定時進行休眠。另外,只有當車位狀態發生變化時,終端結點才對外發送狀態變化的信息,進一步降低了功耗。圖4給出了車位數據采集過程的軟件流程。
3.2 用戶停車申請及處理過程
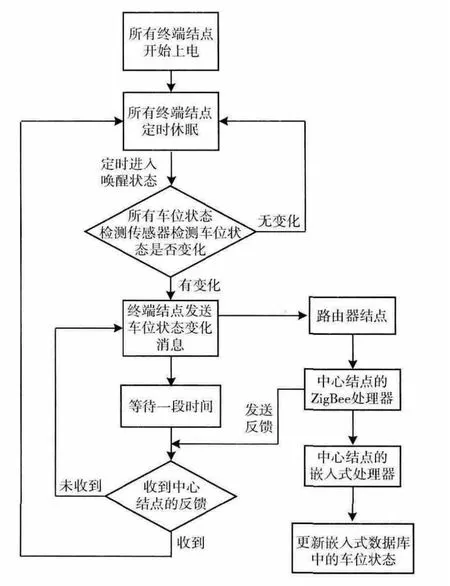
圖4 車位數據采集過程的軟件流程
當用戶有停車需求時,通過語音等方式向智能手機發出停車申請,手機軟件根據用戶的當前位置計算最優停車場,接下來與該停車場ZigBee網絡的中心結點進行通信,中心結點計算最優車位信息后反饋給用戶手機,最后手機軟件將車輛引導至目的車位。圖5給出了用戶停車申請及處理過程的軟件流程。
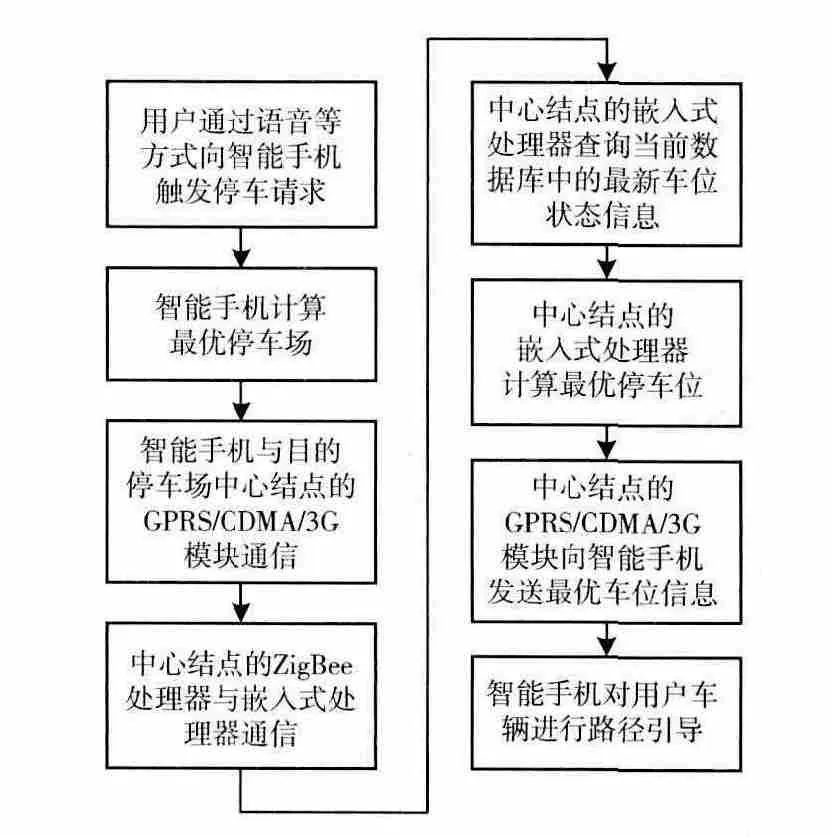
圖5 用戶停車申請及處理過程的軟件流程
在上述處理過程中,其中的技術關鍵是最優停車場與最優停車位的確定,下面介紹所設計的算法。
3.3 停車場、停車位尋優算法
有多種因素會影響人們對停車場及停車位的選擇。對于停車場的選擇,比較常見的因素有:收費價格的高低、車輛當前位置到停車場的行駛距離、停車場到目的地的距離、停車場的規模等。對于停車位的選擇,比較常見的因素有:車位到某步行出口的距離、從車輛入口到車位的距離、車位距停車場出口距離、左右兩側車位是否已被占用等。
由于有多項因素會影響到人們對停車場及停車位的選擇,因此該問題屬于多目標決策中的多屬性決策問題。所謂多屬性決策,是指在考慮多個屬性的情況下,在多個備選方案中選擇最優方案或對方案進行排序的決策問題。
在多屬性決策問題中,各屬性權重的確定是其中的關鍵。比較常見的方法可分為主觀賦權法和客觀賦權法兩類,但這兩類方法都有一定不足。為此,在已有文獻方法[12]的基礎上進行了改進,設計了一種基于熵權的多屬性決策方法。按照熵的思想,人們在決策中獲得的信息量的多少,是決定決策合理性的重要因素。按照信息論中的基本定理,均勻分布情況下的熵最大,但若各種方案在某指標上的取值完全相同時,該指標對決策者未提供任何有用信息。換而言之,熵值越大,提供給決策者的有價值信息量越小。由此,在m 個評價指標、n個待評價方案的(m,n)問題中,定義熵權為

式中:ωi——第i個指標的熵權,Hi——第i個指標的歸一化熵值。Hi定義為


式中:r′ij為原始評價矩陣中的元素。經過上述歸一化后,各方案在某指標上的評價值中,收益性指標中的最小值和最大值分別被歸一化為0和1,成本性指標中的最小值和最大值分別被歸一化為1和0。歸一化后,rij值越大,則對應方案在該指標上越有利。
從熵權ωi的上述定義中可看出,當歸一化熵值Hi因各方案在指標i的評價值相同因而取得最大值1時,熵權值為0,這也意味著該指標未向決策者提供任何有用信息。另一方面,當各方案在指標i的評價值相差較大時,Hi較小,ωi較大,這說明各方案在該指標的評價值上有明顯差異,該指標應重點考慮。為此,對歸一化后的評價矩陣,每行用ωi進行加權后再進行決策處理。這樣就保證了在各方案評價值上差異越大的指標越受到重視。
以停車位的選擇為例,為具體實現上述算法,在嵌入式數據庫中設計了如表1所示的車位信息表。
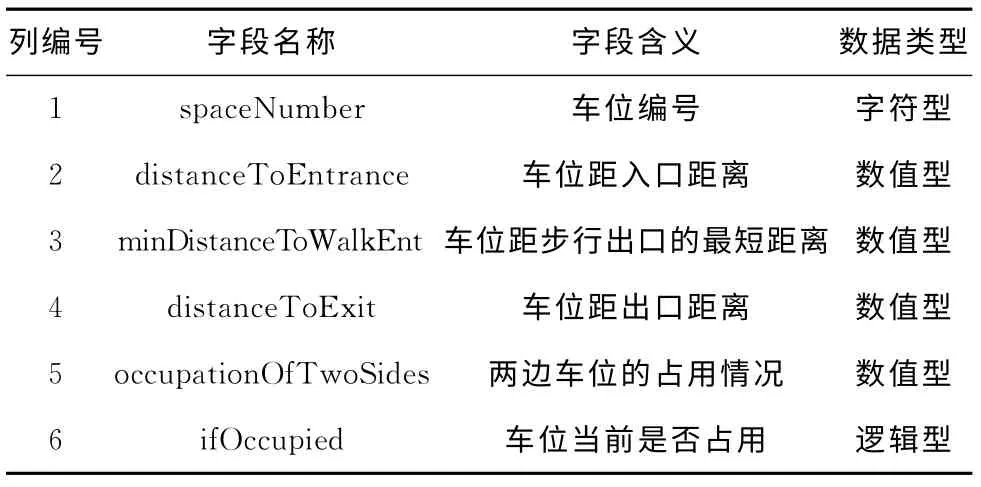
表1 車位信息表的表結構
在表1中,“兩邊車位的占用情況”和 “車位當前是否占用”兩列的取值會根據車位及其周邊車位的實際占用情況,隨時間發生變化。另幾列的值可在初始化時一次性填好。
當需要進行停車位尋優時,停車場ZigBee網絡中心結點的嵌入式處理器查詢數據庫中各車位的當前信息,先排除掉已被占用的車位。接下來,對于所有空閑車位,按照式 (1)~式 (4),計算表1中編號為2、3、4、5 四列的熵權值。利用所得到的四個熵權值,對所有空閑車位2、3、4、5四列的數據進行加權,之后就可利用傳統的多目標決策方法確定最優停車位。
4 實物展示及測試結果
4.1 實物展示
圖6為所開發電路的實物展示圖。其中圖6 (a)為終端結點,圖6 (b)為路由器結點,圖6 (c)為中心結點。圖 (c)中,左側的電路板是LPC11C14板,右側的電路板是CC2530板。其中的部分電路采用了商品化的電路模塊。
4.2 測試結果
在某露天停車位進行了車位狀態檢測傳感器的測試。根據該車位所在停車場的地理朝向,采集時將傳感器的X軸正方向朝正北,Y 軸的正方向朝正西。圖7中,圖7 (a)為有車時的場景,圖7 (b)為無車時的場景。對HMC5883L返回的磁場數據,在有車和無車的情況下,分別進行了10次測試。在10次測試中,有車和無車時Z 軸的磁場強度差都在500毫高斯以上,可以確保對有車和無車兩種情況準確區分。
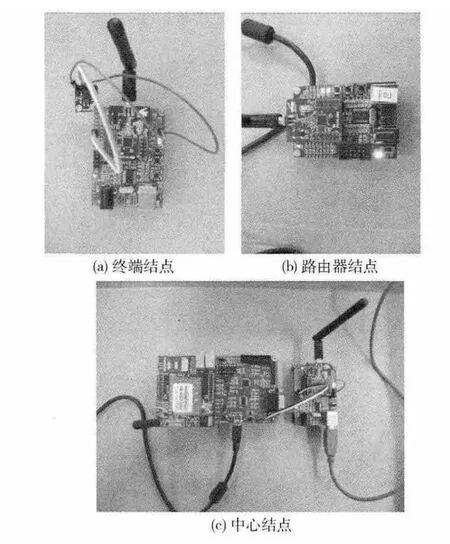
圖6 系統電路實物展示
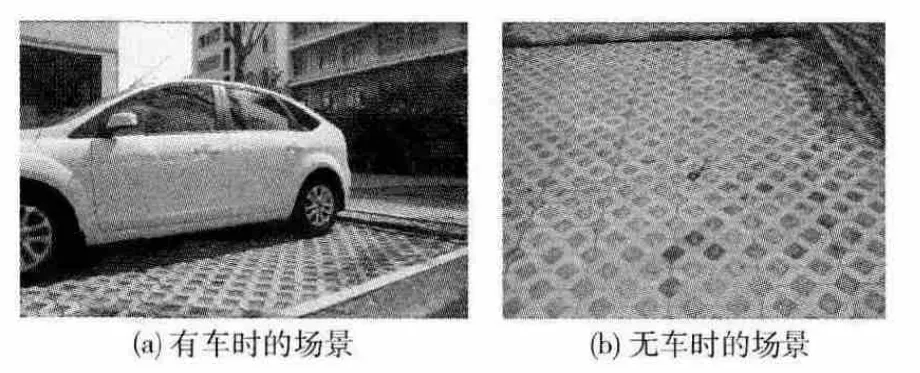
圖7 車位狀態檢測傳感器的測試
為便于測試,在系統的嵌入式數據庫中事先存入表1中所列的各項數據,模擬如圖8所示的車位分布情況。在該圖中,有A2、A8、B8、B15、C3、C11、D4、E1、F11、G4、H4、H5共12個空閑車位。利用3.3節所設計的算法進行計算后,如圖9所示,智能手機選擇了H4車位作為最優車位。所得結果符合人們的習慣。首先,該車位與停車場入口和出口間的距離都適中。其次該車位離電梯非常近。最后該車位旁邊還有1個空閑車位,空間相對寬裕。
5 結束語
針對現有城市智能停車系統的不足,提出一種用戶智能手機與停車場ZigBee網絡相結合的新型架構。利用該架構,城市智能停車系統的運營者無需建設和維護城市控制中心,也無需長期繳納移動通信費用。此外,還實現了用戶通過自己的手機與系統良好交互。
給出了系統的硬件圖、軟件流程圖、停車場和停車位的尋優算法以及系統測試結果。測試結果表明,所選用的HMC5883L磁場傳感器用于車位檢測準確可靠,所設計的停車場、停車位尋優算法的運行結果符合人們的生活習慣,所開發的ZigBee網絡與智能手機軟件之間能夠良好地通信,同時也驗證了所提出架構的可行性。
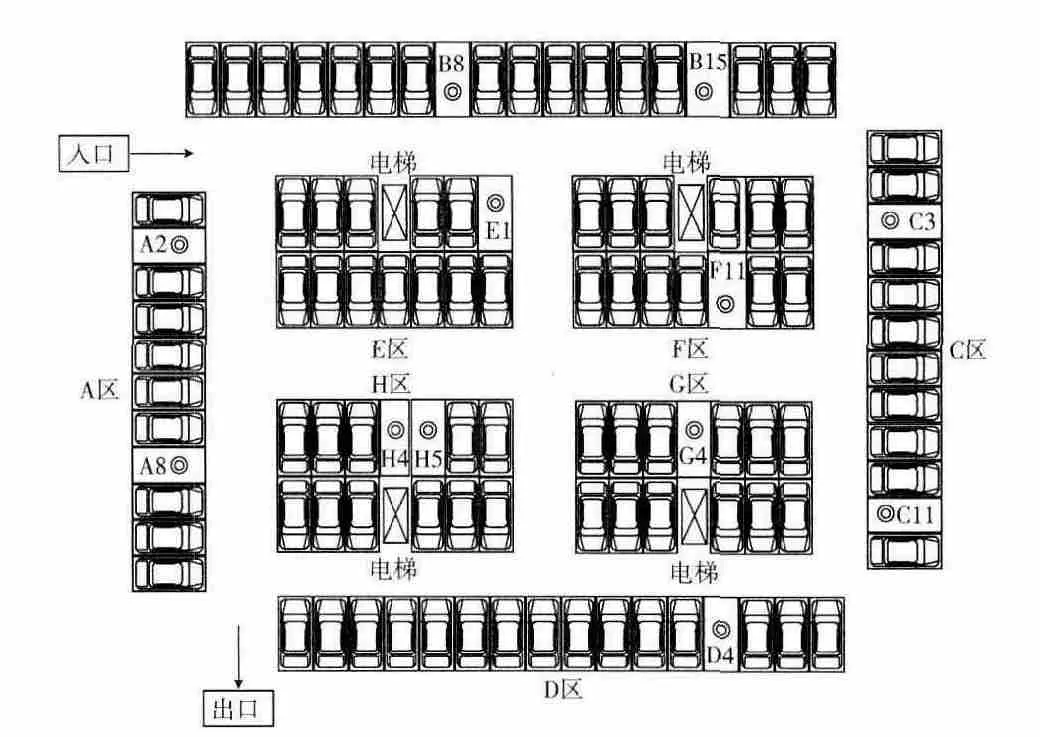
圖8 停車場車位分布模擬
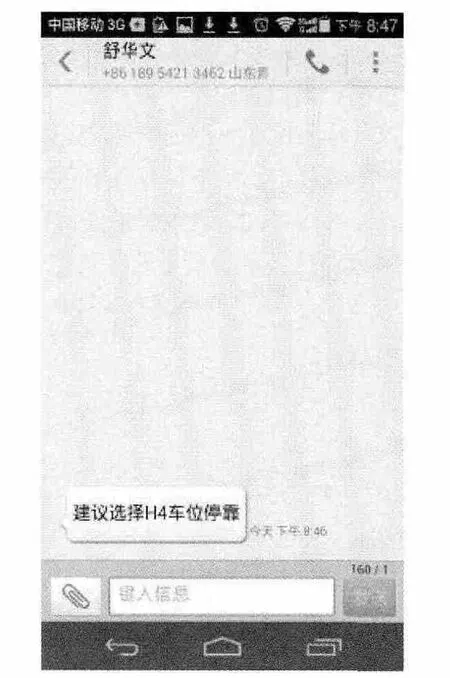
圖9 智能手機上所顯示的車位優化計算結果
[1]Wu E H K,Sahoo J,Chi-Yun L,et al.Agile urban parking recommendation service for intelligent vehicular guiding system[J].IEEE Intelligent Transportation Systems Magazine,2014,6 (1):35-49.
[2]Tubaishat M,Zhuang P,Qi Q,et al.Wireless sensor networks in intelligent transportation systems[J].Wireless Communications and Mobile Computing,2010,9 (3):287-302.
[3]SUN Hao,CHEN Yongrui,XU Xuzhu,et al.Underground parking information system based on wireless sensor network[J].Jounrnal of University of Chinese Academy of Sciences,2013,30 (5):664-670 (in Chinese). [孫昊,陳永銳,許旭柱,等.基于無線傳感器網絡的地下停車場誘導信息系統[J].中國科學院大學學報,2013,30 (5):664-670.]
[4]SHI Wenzao,MAO Zhengyuan.A review of parking guidance information system [J].Urban Public Transport,2012 (9):37-41 (in Chinese).[施文灶,毛政元.停車誘導信息系統研究綜述 [J].城市公共交通,2012 (9):37-41.]
[5]XU Lifeng.Applying wireless sensor network technology in traffic information acquisition system [J].Computer Applications and Software,2012,29 (4):236-241 (in Chinese).[徐立鋒.基于無線傳感器網絡技術在交通信息采集系統的應用 [J].計算機應用與軟件,2012,29 (4):236-241.]
[6]LIU Weibo.Ultrasonic detection system for parking spaces based on ZigBee wireless sensor network [D].Xi’an:Chang’an University,2011 (in Chinese).[劉維波.基于Zigbee無線傳感網絡的超聲波車位檢測系統[D].西安:長安大學,2011.]
[7]XIA Faqin.Principle and implementation of vehicle detection by induction coil[D].Wuhan:Wuhan University of Science and Technology,2011 (in Chinese). [夏發欽.利用地感應線圈檢測機動車輛的原理與實現 [D].武漢:武漢科技大學,2011.]
[8]LI Yucheng,YAN Juanli,WANG Mushu,et al.Approach for parking spaces detection based on video images [J].Com-puter Engineering and Design,2012,33 (1):282-285 (in Chinese).[李宇成,嚴娟莉,王目樹,等.利用視頻圖像檢測車位狀態的方法 [J].計算機工程與設計,2012,33 (1):282-285.]
[9]HU Qiong.Research on application of AMR sensor for vehicle[D].Shanghai:East China University of Science and Technology,2011 (in Chinese).[胡瓊.磁阻傳感器在停車場車位檢測中的應用 [D].上海:華東理工大學,2011.]
[10]JIANG Zhong,LIU Dan.ZigBee technology and practice tutorial-based on wireless sensor network technology using CC2530 [M].Beijing:Qinghua Press,2014 (in Chinese).[姜仲,劉丹.ZigBee技術與實訓教程―基于CC2530的無線傳感網技術 [M].北京:清華大學出版社,2014.]
[11]HAN Chunxian,LIU Xingjie,HAN Yanjun.Embedded system development and practice for ARM Cortex-M0 series[M].Beijing:Beihang University Press,2013 (in Chinese).[韓春賢,劉興杰,韓艷君.ARM Cortex-M0嵌入式系統開發與實踐 [M].北京:北京航空大學出版社,2013.]
[12]RUAN Lianfa,ZHENG Xiaoling.Regional multi target decision algorithm based on entropy weighting [J].Statistics and Decision,2013 (12):82-84 (in Chinese). [阮連法,鄭曉玲.基于熵權法的區間多目標決策方法 [J].統計與決策,2013 (12):82-84.]
猜你喜歡
紅領巾·萌芽(2022年9期)2022-11-24 05:55:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
英語文摘(2020年5期)2020-09-21 09:26:30
趣味(語文)(2018年8期)2018-11-15 08:53:00
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
海峽科技與產業(2016年3期)2016-05-17 04:32:12
商用汽車(2016年4期)2016-05-09 01:23:12