天基連續毫米波空間碎片探測雷達方案設想
2015-12-25 02:29:14尹建鳳李志李懷鋒林親中國空間技術研究院
國際太空 2015年1期
尹建鳳 李志 李懷鋒 林親(中國空間技術研究院)
1 空間碎片的尺寸和分布特性
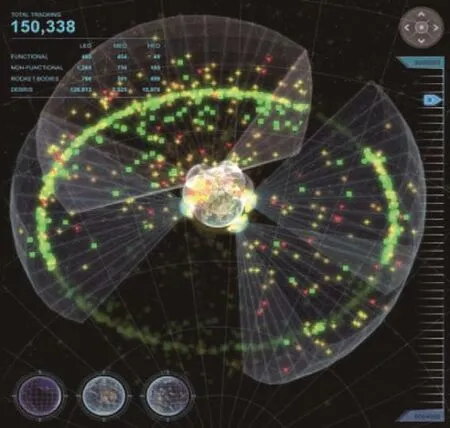
空間碎片是指除正常工作的航天器外所有在軌的人造物體,包括失效載荷、火箭殘骸、操作性碎片、由爆炸和碰撞產生的殘碎片、固體火箭的燃燒剩余物、核動力衛星泄露的冷卻劑以及航天器老化而脫落的表面材料和組件等。據統計,目前已經有約6000t太空垃圾在繞地球飛速運轉。目前能夠編目跟蹤的尺寸在10cm以上的空間碎片約有1.8萬個,1~10cm以下的空間碎片據估計有70萬個。
空間碎片主要分布在距離地面2000km高度以下的低地球軌道、20000km中地球軌道和36000km的地球靜止軌道區域。根據對空間碎片已有數據和建模仿真分析結果,在低軌空間碎片分布中,1~10cm的空間碎片、大于10 c m的空間碎片在800 k m和1400km軌道上分布最為密集。根據美國航空航天局的統計目錄,近地點1000km以下的碎片數量占空間碎片總數量的54%,近地點2000km以下占77%。而且,目前空間碎片數量以每年2%~5%的速度增加,進行編目管理的空間物體數量也以每年200多個的速度迅速增長。可見空間碎片的探測需求極為迫切,尤其是尺寸介于1~10cm的危險碎片,1cm是為保證航天器安全需要監測預警的最小空間碎片尺寸。

不同尺寸的空間碎片分類及特性
2 基于雷達的空間碎片探測手段概述
對于不同尺寸的空間碎片,可采用不同的觀測手段進行探測。一般來說,大尺寸空間碎片探測主要依靠地基光電望遠鏡和地基雷達進行探測;中尺寸(危險)碎片可以通過天基手段(包括雷達或光學)進行探測,小尺寸空間碎片主要通過對在軌飛行過的航天器表面采樣分析進行探測。本文主要對基于雷達的空間碎片探測手段進行介紹。

空間碎片探測途徑分類
地基雷達空間碎片探測
地基雷達是目前空間碎片探測的主要手段。國外在空間碎片的地基雷達探測方面表現為兩種思路:一是對較大目標的跟蹤與編目,一般采用由多部大型相控陣雷達、電子籬笆和機械跟蹤雷達等組成的傳感器網來實現,其典型代表是美國的空間監視網(SSN)和俄羅斯的空間監視系統(SSS)。這種探測方式的優點是可獲取目標的詳細信息,包括軌道根數、姿態、尺寸、形狀、軌道壽命、彈道系數、質量、材料屬性、雷達散射截面積(RCS)等。
美國空間監視網的地基雷達(相控陣雷達)和光學傳感器/望遠鏡(深空和近地)分布在全世界20個站點,其中北美的“太空籬笆”(Space Fence)久負盛名。當前,利用空間監視網的觀測數據,對尺寸大于10cm的低軌目標以及尺寸超過30cm的地球同步軌道目標進行了完善的編目。
俄羅斯的空間監視系統包括“沃羅涅日”DM遠程導彈預警雷達等組成的雷達探測網、“天窗”系統等組成的光學探測網和空間監視中心(SSC)。由于布站位置的限制,空間監視系統雷達對小傾角軌道和大偏心率軌道目標的觀測能力有限,對低軌50cm以上目標的編目能力與空間監視網基本一致,但對10~50cm目標的編目不如后者完備。不過,俄羅斯在利用光電望遠鏡進行空間目標監視方面水平很高,某些方面超過了美國。另一種是對無法跟蹤的中小尺寸碎片的統計采樣,一般利用窄波束雷達,如美國的Haystack-HAX、Goldstone和Cobra Dane雷達、德國的TIRA雷達等。采用這種方式可獲得碎片數量隨軌道高度、傾角和尺寸的分布等信息。

典型空間碎片探測雷達系統主要參數
電磁籬笆是一種收發分置的地基雷達,是目前性價比較高的空間碎片監測設備,電磁籬笆中雷達天線發出的電磁波不是一條細細的波束,而是一個薄薄的面。空間目標穿越時,反射雷達的電磁波由接收機接收,將前后幾次穿越的數據集合起來就能確定目標的軌道。電磁籬笆根據空間目標的軌道特性設計,一般在東西向的波束寬度非常寬,而在南北向的波束寬度很窄。
美國電磁籬笆由3個發射站和6個接收站組成,空域監視屏布局選擇在33°(N),經度范圍為77.5°(W)~120°(W),設計的威力范圍軌道高度可以達到24000km。美國的電磁籬笆建設年代較早,它的布局設計充分利用了美國本土范圍寬廣的地理優勢,探測范圍大;但它的屏很薄,不能測量多普勒頻移,至少3次穿越才能定軌,定軌效率不高。因此,美國正在進行電磁籬笆的改造升級,計劃將原來中間的VHF頻段的屏保留,將兩邊的屏升級改造為S頻段,并將在澳大利亞和南大西洋各增加一個站點,進一步提高地基監視系統對整個空域的覆蓋率。升級后的電磁籬笆系統被稱為“太空籬笆”。
“太空籬笆”概念圖
天基雷達監測是目前空間目標監測的發展方向之一,目前已有報道的空間碎片天基雷達觀測系統包括美國在“國際空間站”上搭載的用于監視軌道目標的雷達、法國國家空間研究中心小衛星群上的微波雷達、俄羅斯的毫米波相控陣雷達、加拿大的空間目標監測雷達,以及歐洲航天局研制的太空目標跟蹤相控陣雷達等。

美國改造升級后的電磁籬笆波段示意圖
美國曾深入論證過的在“國際空間站”上搭載、用于監視軌道上危險目標的雷達包括兩種:一個是德州農工(A&M)大學負責的Ka頻段毫米波雷達,此雷達系統裝載在空間站或接近空間站的平臺上,先由紅外探測系統提供目標的原始位置信息,然后采用各種先進技術,包括相控陣、單脈沖跟蹤、脈沖壓縮、高功率發射機、低噪聲接收機、脈沖積累信號處理等技術,完成距離空間站最大25km處的4mm~8cm空間目標的跟蹤與預測,并給美國航空航天局提供碰撞和預警信息;另一個是約翰遜航天中心與洛克菲勒工程科學公司合作的Ku頻段天基雷達,該系統利用地面雷達站(2~3個)提供低軌直徑2~10cm目標的軌道預測信息,采用固定電子波束,在預測位置探測穿越軌道面的空間目標,提供目標穿越軌道面的時間、目標俯仰角、目標距離以及距離變化率,這些信息被傳送到地面站,經地面大于30dB的處理增益,得到直徑大于2cm、距離400km處的空間目標的最新精確軌道信息,判斷碰撞的可能性,然后給空間站發送機動規避信息。
俄羅斯的Vympel公司開展了探測小尺寸(毫米級)空間目標的低功耗天基雷達的概念研究,工作于95GHz,雷達采用7單元天線組成的相控陣陣列天線,每個掃描扇區的波束寬度為4mrad,天線掃描扇區與平臺軌道垂直。
加拿大Davion系統有限公司開展了空間目標探測器的概念研究。該探測器可以放在航天器上作為其組成部分,或在航天器附近作為一個獨立飛行體運行。該探測器可以建立交叉軌道上目標的數據庫,由此數據庫可以預測可能產生的碰撞。采用一個靜止的波束矩陣,波束按車輪的輪輻排列,波束形狀為扇形,波束在垂直于車輪面的俯仰角很寬,在平行于車輪面的方位角很窄。空間目標至少穿越兩個波束,從穿越波束的兩次回波中可以推導出徑向速度和穿越兩個波束的間隔時間,由此可以推算出目標穿越波束時的位置和速度。
通過對已有報道的天基空間碎片觀測雷達系統可知,該類系統大都工作于毫米波段。事實上,由于外層空間不存在大氣對毫米波的吸收效應,天基空間碎片觀測雷達特別適合工作在毫米波段。毫米波段雷達波長較短,易于觀測尺寸較小的空間碎片,容易實現較高的測量精度,而且容易以較小的體積和質量實現,適用于天基平臺。然而,由于天基空間碎片觀測雷達系統調度與標校、碎片觀測資料與編目庫的關聯等問題較難解決,目前還未見明確報道已獲得應用的天基空間碎片觀測雷達系統。
3 小型連續毫米波空間碎片探測雷達初步方案設想
天基毫米波空間碎片探測雷達需求
如前所述,天基毫米波雷達是小的空間碎片探測的一種重要手段,如何在質量、功耗、體積有限的搭載平臺上實現高分辨率、高靈敏度的毫米波雷達,成為天基探測關鍵技術之一。據統計,低軌道的危險碎片數量最多,主要存在于800km和1400km的軌道高度,這對正常在軌運行的衛星是很大的威脅。對位于低軌道的高價值衛星,為避免受到1~10cm空間碎片的碰撞帶來的巨大損失,可在其上搭載小型毫米波空間碎片探測雷達,實現對其周圍主要碎片來源方向的全天時、全天候探測,為衛星提供相應的預警規避信息。
通過對低軌衛星與空間碎片的相對運動分析,得出可能與低軌衛星相遇的空間碎片的到達方位角范圍主要在迎風面及其左右兩側,暫時取垂直于軌道面內以衛星飛行方向為軸兩側各45°的范圍,而俯仰角(即沿軌道半長軸的方向)的范圍則較小。對于這樣的探測范圍,可采用同時多波束天線,并利用波束時分掃描的方式覆蓋整個觀測區。
雷達體制選擇及主要參數分析
利用天基雷達對空間碎片探測,可采用脈沖多普勒體制或連續波體制,這兩種體制的速度測量和角度測量原理相同,即都是采用多普勒測速、單脈沖測角原理,它們的距離測量原理不同,脈沖體制的雷達是利用回波信號的時延實現距離測量,連續波雷達是利用回波信號與發射信號的相位差實現距離測量。對連續波雷達,為了解決測距模糊問題,一般要設置多頻或雙頻信號進行解模糊,將增加收發系統的復雜度。但總體而言,與脈沖體制雷達相比,連續波體制雷達具有體積小、質量輕、峰值功率低、探測目標無盲區,速度測量精度高等優點,適合于天基平臺的空間小碎片探測,因此建議選用多頻連續波雷達實現目標探測。
(1)工作頻率選擇
假設探測對象的尺寸是8cm,為了使雷達工作在光學區獲得更大的目標雷達散射截面積,應該采用較高的工作頻率(波長應小于1.5cm),目前在這個頻率范圍內,選用35GHz的雷達或通信系統較多,這個頻率微波器件的技術成熟度相對較高,因此空間碎片探測雷達的中心頻率也選擇在35GHz。
(2)采樣率分析
考慮到在低軌情況下,空間碎片與航天器之間的最大相對速度可達15km/s,因此,為了保證對進入和離開雷達波束的目標不產生速度模糊,采樣率必須不小于最大多普勒頻率的2倍,再考慮一定余量,最大采樣率按8MHz設計。
(3)發射信號波形分析
為了獲得探測距離范圍內無模糊高精度測距,需要根據所采取的測距方案對發射波形進行設計。本文中的雷達測距采用多頻連續波雷達測距中的二次頻差法測距,經過分析,需要設置以下5種一次頻差、4種二次頻差,其中頻差增大倍數N=4,考慮一定的余量,不模糊距離按15km設計,所選取的一次和二次頻差如下表所示。

連續波測距的雙頻頻差設計
由于每組雙頻信號工作一段時間,要幾個工作周期才能獲得無模糊高精度測距結果,這將使得系統的實時性下降,一方面可采取縮短單組信號工作周期的方法,另一方面可以對稍短(少數周期)時間內的目標回波進行處理。
天線和發射機形式分析
由于要求的方位和俯仰探測范圍較寬,同時為了兼顧天線增益,天線瞬時波束不可能做得很大,因此需要采用具有二維掃描能力的天線,有源毫米波相控陣天線較為合適。天線形式為正方形陣列,由于采用連續波體制雷達,收發分置,發射天線和接受天線的面積相等,發射天線全孔徑發射,接收天線分為4個子孔徑,形成4個信號,由和差器對這4個信號進行矢量加減,分別獲得和支路信號、俯仰差支路信號、方位差支路信號,其中和支路信號等效于全孔徑接收用于實現目標的探測、測距和測速,俯仰差支路和方位差支路信號用于進行角度測量。另外,由于空間碎片和探測雷達平臺的相對速度較快,對其進行跟蹤的難度較大、意義也不大,因此不建議天線對目標進行跟蹤,利用目標在天線波束內的時間進行積累探測。
近年Ka頻段的功率放大器得到快速發展,利用功率合成和空間合成技術,固態功率放大器的功率已達到百瓦量級,但其效率僅有百分之十幾,其空間應用還有一定的差距。與之相比較,空間行波管的效率已達到50%,輸出功率也較大,因此現階段可考慮使用高效空間行波管放大器。對于功率要求不高的情況,也可以采用固態放大器。

連續毫米波碎片探測有源相控陣天線示意圖
探測能力分析
(1)探測距離分析
假設連續毫米波雷達探測系統的參數已設定(如連續波雷達系統參數表所示),則對不同尺寸的空間碎片(等效為圓盤,從其法向方向入射的情況下)的探測距離存在不同,見空間碎片直徑和探測距離對比分析表。
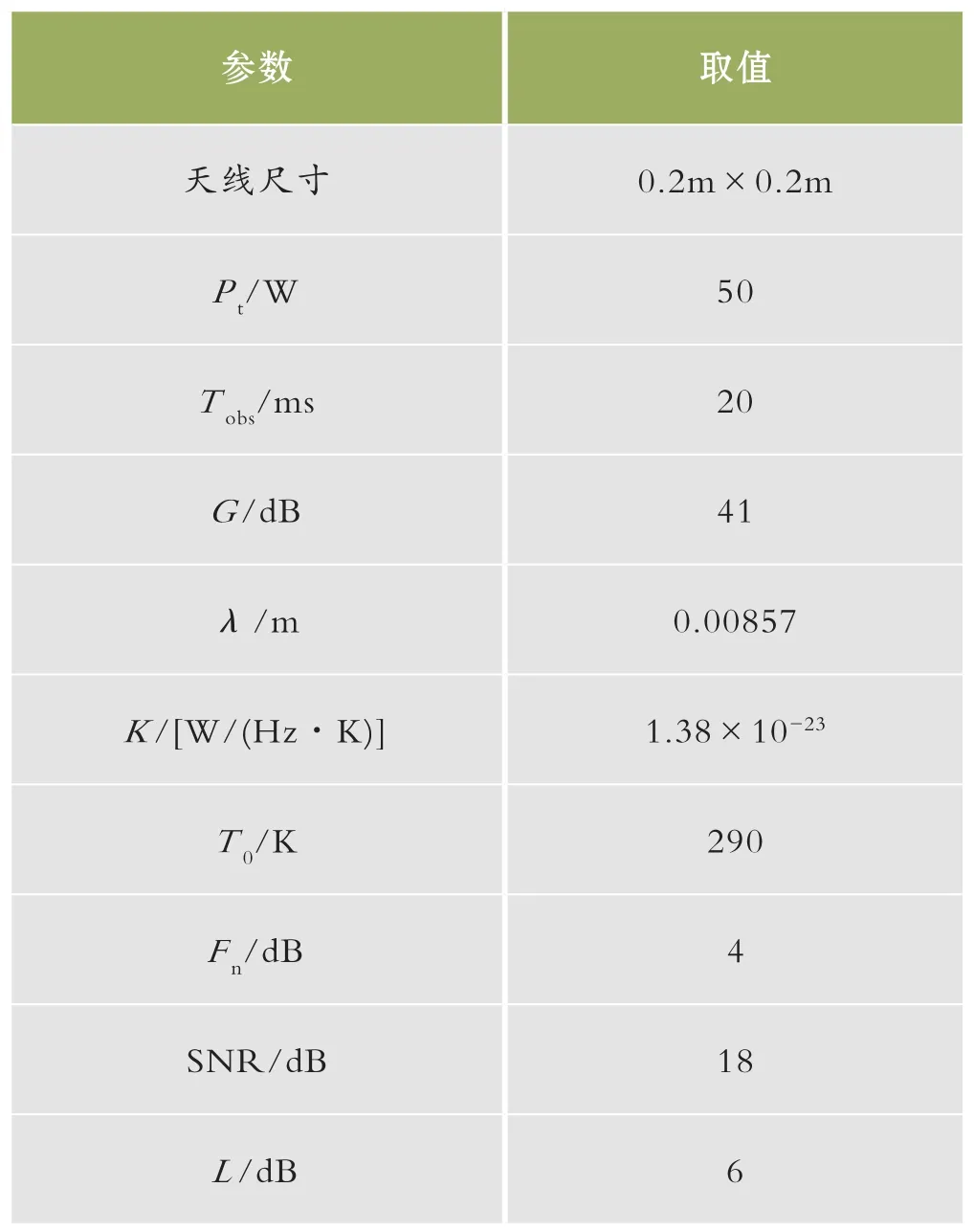
連續波雷達系統參數

空間碎片直徑和探測距離對比分析表
(2)探測精度分析
通過設置一定的仿真條件(距離10km處檢測信噪比為18dB),針對所設計的頻率波形進行仿真,得到不同距離處和不同信噪比時的測距精度變化曲線。

不同信噪比對測距精度的影響

不同距離處的測距精度
通過演算,可得隨機測速誤差為0.02m/s,同時考慮一定的系統誤差,連續波雷達的測速精度應不低于0.05m/s。隨機誤差導致的單脈沖測角精度約為0.1°。
