精梳機(jī)分離羅拉傳動(dòng)機(jī)構(gòu)的平衡優(yōu)化
2015-12-25 01:49:30李留濤賈國欣任家智
紡織學(xué)報(bào) 2015年8期
關(guān)鍵詞:優(yōu)化
李留濤,賈國欣,任家智
(1.中原工學(xué)院,河南鄭州 450007;2.河南省紡織服裝協(xié)同創(chuàng)新中心,河南鄭州 450007;3.河南工程學(xué)院,河南 鄭州 450007)
在精梳機(jī)運(yùn)行過程中,由于分離羅拉傳動(dòng)機(jī)構(gòu)構(gòu)件的復(fù)雜性,導(dǎo)致機(jī)器產(chǎn)生較大的振動(dòng),對(duì)棉網(wǎng)搭接質(zhì)量以及車速的提高有著顯著的影響。目前,在國產(chǎn)精梳機(jī)中,分離羅拉傳動(dòng)機(jī)構(gòu)大都采用連桿機(jī)構(gòu)與行星輪系相結(jié)合的形式,隨著車速的不斷提高,構(gòu)件及機(jī)構(gòu)受到的慣性力也隨著增大,導(dǎo)致構(gòu)件的疲勞損壞加劇,壽命縮短。然而,目前國內(nèi)外專門針對(duì)精梳機(jī)分離羅拉傳動(dòng)機(jī)構(gòu)振動(dòng)的研究較少,且屬于定性研究的范疇,沒有明確給出降低精梳機(jī)分離羅拉傳動(dòng)機(jī)構(gòu)振動(dòng)的具體參數(shù),因此,本文在對(duì)現(xiàn)有分離羅拉傳動(dòng)機(jī)構(gòu)進(jìn)行深入分析的基礎(chǔ)上,利用MatLab計(jì)算機(jī)編程技術(shù)、Solidworks三維建模技術(shù)及Adams虛擬樣機(jī)仿真技術(shù)對(duì)分離羅拉傳動(dòng)機(jī)構(gòu)的振動(dòng)進(jìn)行了定量研究,并得出了使分離羅拉傳動(dòng)機(jī)構(gòu)慣性力降低的具體優(yōu)化方案,對(duì)于降低精梳機(jī)的振動(dòng)具有重要的指導(dǎo)意義[1-3]。
1 分離羅拉傳動(dòng)機(jī)構(gòu)
分離羅拉傳動(dòng)機(jī)構(gòu)是精梳機(jī)完成精梳任務(wù)的核心機(jī)構(gòu)之一,其主要作用是使上一工作循環(huán)形成的棉叢與本次循環(huán)形成的棉叢進(jìn)行搭接,以形成連續(xù)不斷的棉網(wǎng)輸出機(jī)外。為保證分離接合的順利進(jìn)行,分離羅拉必須完成周期性的倒轉(zhuǎn)→順轉(zhuǎn)→基本靜止的動(dòng)作。為實(shí)現(xiàn)分離羅拉的這種運(yùn)動(dòng)規(guī)律,精梳機(jī)的分離羅拉傳動(dòng)機(jī)構(gòu)由變速、恒速2部分組成[4-6]。分離羅拉傳動(dòng)機(jī)構(gòu)如圖1所示。
在圖1(a)和(b)中,O為錫林軸中心,O1為偏心套旋轉(zhuǎn)中心,O2為后擺臂軸中心,O3為32齒齒輪軸中心,定時(shí)調(diào)節(jié)盤繞錫林軸中心O并與錫林軸一起做勻速圓周運(yùn)動(dòng),連桿1通過點(diǎn)A與定時(shí)調(diào)節(jié)盤鉸接,通過點(diǎn)B與偏心套鉸接,擺動(dòng)臂通過點(diǎn)E與連桿2鉸接,通過點(diǎn)D與搖桿鉸接,通過點(diǎn)C活套于偏心套上,當(dāng)偏心套在定時(shí)調(diào)節(jié)盤的帶動(dòng)下做圓周運(yùn)動(dòng)時(shí),擺動(dòng)臂在搖桿的約束下隨之運(yùn)動(dòng),同時(shí),擺動(dòng)臂通過連桿2帶動(dòng)搖桿結(jié)合件做繞32齒齒輪軸中心O3的周期性擺動(dòng)運(yùn)動(dòng)。圖1(c)中,由平面連桿機(jī)構(gòu)得到的周期性擺動(dòng)運(yùn)動(dòng)傳遞到32齒齒輪上,錫林軸通過固裝其上的15齒齒輪,經(jīng)56齒過橋齒輪,將一恒速運(yùn)動(dòng)傳遞給95齒齒輪,使22齒行星輪獲得恒速公轉(zhuǎn)運(yùn)動(dòng),22齒行星輪與周期性擺動(dòng)的32齒齒輪嚙合獲得自轉(zhuǎn)運(yùn)動(dòng),22齒行星輪將恒速運(yùn)動(dòng)和變速運(yùn)動(dòng)合成后經(jīng)29齒齒輪、25齒齒輪、87齒齒輪、28齒齒輪將運(yùn)動(dòng)傳遞至分離羅拉,使分離羅拉實(shí)現(xiàn)周期性的倒轉(zhuǎn)→順轉(zhuǎn)→基本靜止的運(yùn)動(dòng)。

圖1 分離羅拉傳動(dòng)機(jī)構(gòu)Fig.1 Detaching roller transmission mechanism.(a)Actual structure of planar linkage;(b)Kinematic sketch of planar linkage;(c)Differential gear train of detaching roller transmission mechanism
2 分離羅拉傳動(dòng)機(jī)構(gòu)的慣性力
根據(jù)達(dá)朗貝爾原理,在機(jī)構(gòu)各運(yùn)動(dòng)構(gòu)件所受諸外力的反作用力都作用于同一機(jī)座的情況下,該機(jī)座所受的振動(dòng)力即為機(jī)構(gòu)各運(yùn)動(dòng)構(gòu)件慣性力構(gòu)成的慣性力的主矢[7-9]。在對(duì)分離羅拉傳動(dòng)機(jī)構(gòu)的研究中,為得到機(jī)構(gòu)慣性力的變化規(guī)律,利用Solidworks軟件對(duì)機(jī)構(gòu)進(jìn)行三維建模,然后導(dǎo)入Adams軟件中,利用軟件的虛擬樣機(jī)仿真技術(shù)對(duì)現(xiàn)有的分離羅拉傳動(dòng)機(jī)構(gòu)進(jìn)行仿真分析,得到機(jī)構(gòu)慣性力的變化規(guī)律,并在此基礎(chǔ)上找到改善機(jī)構(gòu)振動(dòng)情況的具體方法。
2.1 分離羅拉傳動(dòng)機(jī)構(gòu)三維模型的建立
為對(duì)分離羅拉傳動(dòng)機(jī)構(gòu)進(jìn)行動(dòng)力學(xué)分析,首先根據(jù)各個(gè)零件的尺寸在Solidworks軟件中建立三維模型,并按照機(jī)構(gòu)的裝配工藝進(jìn)行裝配,然后生成可導(dǎo)入Admas軟件中的.x_t文件,供Adams軟件仿真時(shí)使用。利用Solidworks軟件建立的三維模型如圖2所示。
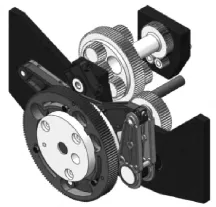
圖2 分離羅拉傳動(dòng)機(jī)構(gòu)三維模型Fig.2 Three-dimensional model of detaching roller transmission mechanism
2.2 機(jī)構(gòu)慣性力分析
將在Solidworks軟件中生成的.x_t文件導(dǎo)入Adams仿真軟件中,并對(duì)分離羅拉傳動(dòng)機(jī)構(gòu)中各個(gè)構(gòu)件確定材質(zhì),同時(shí)添加相應(yīng)的約束、驅(qū)動(dòng),對(duì)機(jī)構(gòu)慣性力進(jìn)行模擬分析。
在Adams軟件中,設(shè)置仿真時(shí)間為50 s,步數(shù)為10 000,精梳機(jī)速度為400 r/min,對(duì)分離羅拉傳動(dòng)機(jī)構(gòu)中單個(gè)構(gòu)件慣性力及總慣性力的仿真結(jié)果如圖3和表1所示。
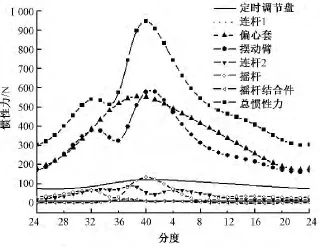
圖3 400 r/min時(shí)分離羅拉傳動(dòng)機(jī)構(gòu)單個(gè)構(gòu)件和總慣性力Fig.3 Single component and total inertia force of detaching roller transmission mechanism at 400 r/min

表1 400 r/min時(shí)分離羅拉傳動(dòng)機(jī)構(gòu)慣性力特征參數(shù)Tab.1 Inertial force's characteristic parameters of detaching roller transmission mechanism at 400 r/min N
以單個(gè)構(gòu)件產(chǎn)生的慣性力和總慣性力的最大值為衡量指標(biāo),對(duì)仿真結(jié)果進(jìn)行分析可知:定時(shí)調(diào)節(jié)盤、連桿1、偏心套、擺動(dòng)臂、連桿2、搖桿、搖桿結(jié)合件產(chǎn)生的慣性力分別占總慣性力的比重依次為0.73%、8.01%、36.87%、38.55%、5.72%、8.75%、1.37%,可見偏心套和擺動(dòng)臂產(chǎn)生的慣性力在機(jī)構(gòu)總慣性力中所占的比例遠(yuǎn)遠(yuǎn)超過其他構(gòu)件,因此,減小偏心套和擺動(dòng)臂產(chǎn)生的慣性力可有效地降低整個(gè)機(jī)構(gòu)的慣性力,有利于提高機(jī)器的速度和降低振動(dòng)。
3 分離羅拉傳動(dòng)機(jī)構(gòu)的平衡優(yōu)化
3.1 傳動(dòng)機(jī)構(gòu)的平衡分析
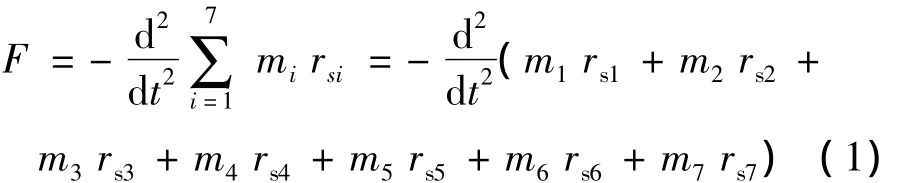
圖4為分離羅拉傳動(dòng)機(jī)構(gòu)平衡示意圖。以錫林軸中心點(diǎn)O為坐標(biāo)原點(diǎn)建立直角坐標(biāo)系;mi(i=1~7)為機(jī)構(gòu)中第i個(gè)構(gòu)件的質(zhì)量;M為分離羅拉傳動(dòng)機(jī)構(gòu)中構(gòu)件的總質(zhì)量;ri(i=1~7)為第i個(gè)構(gòu)件質(zhì)心到構(gòu)件轉(zhuǎn)動(dòng)中心的距離;rsi(i=1~7)為第i個(gè)構(gòu)件質(zhì)心位置矢量;θi(i=1~7)為第i個(gè)構(gòu)件質(zhì)心與構(gòu)件旋轉(zhuǎn)中心連線與構(gòu)件的夾角;φi(i=1~7)為第i個(gè)構(gòu)件質(zhì)心與構(gòu)件旋轉(zhuǎn)中心連線與x軸正向的夾角;li(i=1~7)為第i個(gè)構(gòu)件的長度;αi(i=1~4)為構(gòu)件與機(jī)架鉸接點(diǎn)之間的連線與x軸正向的夾角;Li(i=1~4)為構(gòu)件與機(jī)架鉸接點(diǎn)之間連線的長度。利用線性獨(dú)立向量法對(duì)分離羅拉傳動(dòng)機(jī)構(gòu)進(jìn)行分析可得到機(jī)構(gòu)的慣性力:
要使機(jī)構(gòu)的慣性力為0,則必須滿足下列條件:

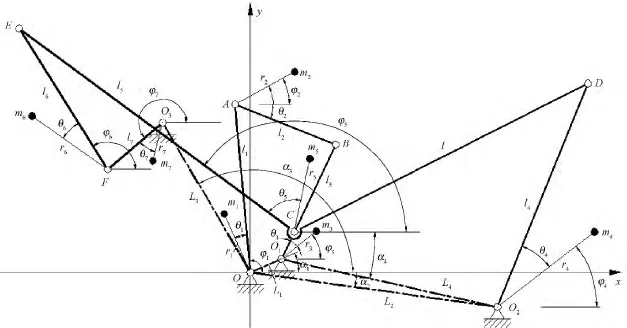
圖4 分離羅拉傳動(dòng)機(jī)構(gòu)示意圖Fig.4 Schematic diagram of detaching roller transmission mechanism
式中C為常數(shù)。
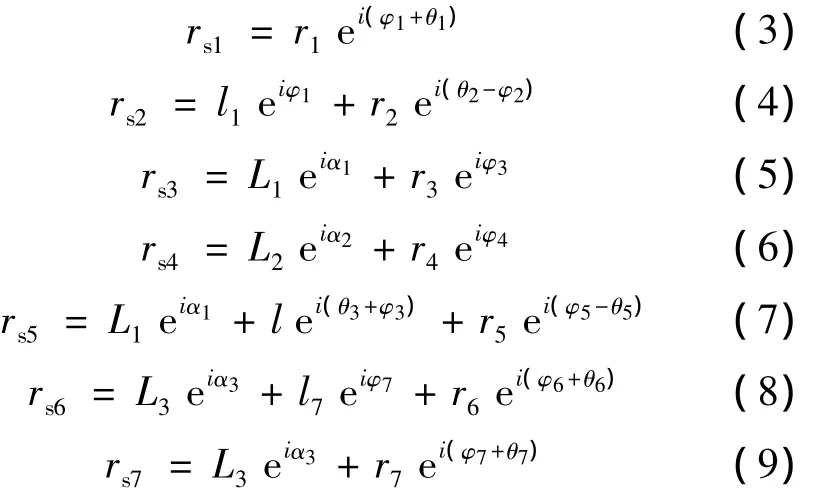
對(duì)分離羅拉傳動(dòng)機(jī)構(gòu)中3個(gè)運(yùn)動(dòng)閉環(huán)OABO1、O1CDO2、OO1CEFO3列其矢量方程:

聯(lián)立求解式(3)~(12),并將求解結(jié)果代入式(2),整理可得式(13):

根據(jù)式(13)可得到機(jī)構(gòu)慣性力為0的條件:當(dāng)機(jī)構(gòu)慣性力為0時(shí),機(jī)構(gòu)的總質(zhì)心位移保持不變,此時(shí)要求機(jī)構(gòu)質(zhì)心位移矢量表達(dá)式中含有φi(i=1~7)的項(xiàng)全部為0。
3.2 傳動(dòng)機(jī)構(gòu)的平衡優(yōu)化分析
由分離羅拉傳動(dòng)機(jī)構(gòu)的平衡分析可知,對(duì)分離羅拉傳動(dòng)機(jī)構(gòu)的平衡優(yōu)化只是在xOy平面的慣性力的平衡,因此本文討論的是機(jī)構(gòu)在靜平衡范疇內(nèi)慣性力的平衡優(yōu)化問題。由式(13)可知,分離羅拉傳動(dòng)機(jī)構(gòu)平衡優(yōu)化后慣性力為0的條件為:

由式(14)~(17)可知,要對(duì)分離羅拉傳動(dòng)機(jī)構(gòu)進(jìn)行慣性力為0的平衡優(yōu)化,至少要添加4個(gè)配重,但由于車頭箱空間有限,故在該機(jī)構(gòu)平衡優(yōu)化中,慣性力為0的平衡只能在理論上實(shí)現(xiàn),在實(shí)際生產(chǎn)中一般不采用。
對(duì)分離羅拉傳動(dòng)機(jī)構(gòu)進(jìn)行部分平衡優(yōu)化,就是添加一定數(shù)目的配重或桿組使機(jī)構(gòu)的振動(dòng)減少到較為滿意的程度,因此可利用上述分離羅拉傳動(dòng)機(jī)構(gòu)動(dòng)力學(xué)分析的結(jié)果,對(duì)在運(yùn)動(dòng)過程中慣性力較大的構(gòu)件進(jìn)行平衡優(yōu)化。根據(jù)以上分析可知,偏心套和擺動(dòng)臂產(chǎn)生的慣性力在機(jī)構(gòu)總慣性力中所占比例較大,故對(duì)偏心套和擺動(dòng)臂添加配重可有效地降低機(jī)構(gòu)的慣性力。
機(jī)構(gòu)總質(zhì)心軌跡會(huì)隨著各個(gè)構(gòu)件的長度、質(zhì)量以及構(gòu)件質(zhì)心位置的改變而變化,質(zhì)心的運(yùn)動(dòng)范圍越大,機(jī)構(gòu)的慣性力就越大。考慮到減小擺動(dòng)臂的質(zhì)量可能會(huì)影響該構(gòu)件的正常功能,而由于車頭箱空間的限制,對(duì)擺動(dòng)臂添加配重極其困難,故本文以對(duì)偏心套添加配重塊為例對(duì)分離羅拉傳動(dòng)機(jī)構(gòu)進(jìn)行平衡優(yōu)化。
以平衡后機(jī)構(gòu)總慣性力F的最大值為最小作為目標(biāo)函數(shù),以機(jī)器內(nèi)部的空間限制為約束條件,對(duì)式(13)的多變量有約束非線性函數(shù)最小化問題進(jìn)行優(yōu)化,確定配重塊的最優(yōu)參數(shù)值。
利用MatLab軟件中的優(yōu)化函數(shù)fmincon對(duì)機(jī)構(gòu)進(jìn)行優(yōu)化,優(yōu)化后配重塊的參數(shù)為:配重塊質(zhì)量m為3.033 3 kg,配重塊質(zhì)心到配重塊旋轉(zhuǎn)中心的距離SS2為66.12 mm,SS1與 SS2角度為180°。其中S1為偏心套質(zhì)心,S為偏心套旋轉(zhuǎn)中心,S2為配重塊質(zhì)心。具體安裝位置如圖5所示。
將優(yōu)化后的配重塊安裝到機(jī)構(gòu)中,利用Adams虛擬樣機(jī)仿真技術(shù)對(duì)機(jī)構(gòu)進(jìn)行仿真分析,仿真時(shí)間設(shè)置為50 s,步數(shù)設(shè)置為10 000,速度分別設(shè)置為300、400、500 r/min,優(yōu)化前后的慣性力及慣性力減少率如表2所示。由表可知:1)除慣性力的平均值外,分離羅拉傳動(dòng)機(jī)構(gòu)優(yōu)化后比優(yōu)化前的慣性力最大值減小了約11.31%,最小值減小了約11.33%,極差降低了約11.30%,標(biāo)準(zhǔn)偏差降低了約12.19%;2)除慣性力平均值的減小率逐漸降低之外,其他慣性力參數(shù)的變化率基本在很小范圍內(nèi)變化。故在考慮仿真參數(shù)設(shè)置精度誤差的情況下,可認(rèn)為當(dāng)機(jī)構(gòu)的優(yōu)化方案確定之后,機(jī)構(gòu)慣性力最大值、最小值、極差、標(biāo)準(zhǔn)偏差的變化率恒定,與機(jī)構(gòu)的運(yùn)動(dòng)速度無關(guān)。
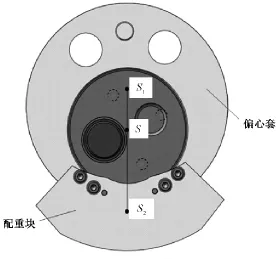
圖5 配重塊與偏心套安裝位置圖Fig.5 Installation drawing of balancing weight and eccentric sleeve

表2 優(yōu)化前后的慣性力特征參數(shù)Tab.2 Inertial force's characteristic parameters before and after optimization
4 結(jié)論
1)精梳機(jī)在運(yùn)動(dòng)過程中,各構(gòu)件受到的慣性力大小依次為擺動(dòng)臂、偏心套、搖桿、連桿2、連桿1、搖桿結(jié)合件、定時(shí)調(diào)節(jié)盤;而擺動(dòng)臂和偏心套在運(yùn)動(dòng)過程中產(chǎn)生的慣性力占機(jī)構(gòu)總慣性力的75%以上,故通過對(duì)擺動(dòng)臂和偏心套進(jìn)行平衡優(yōu)化,可有效降低整個(gè)機(jī)構(gòu)的平衡程度。
2)在考慮仿真參數(shù)設(shè)置精度誤差的情況下,當(dāng)機(jī)構(gòu)的優(yōu)化方案確定之后,機(jī)構(gòu)慣性力最大值、最小值、極差、標(biāo)準(zhǔn)偏差的變化率在不同速度時(shí)基本一致,與機(jī)構(gòu)的運(yùn)動(dòng)速度無關(guān)。
3)通過對(duì)分離接合傳動(dòng)機(jī)構(gòu)的平衡優(yōu)化,減小了機(jī)構(gòu)慣性力,有利于改善機(jī)構(gòu)的平衡狀態(tài),為精梳機(jī)速度的提高提供了理論參考和解決途徑。
4)采用Adams虛擬樣機(jī)技術(shù)和MatLab計(jì)算機(jī)編程技術(shù)可有效地縮短精梳機(jī)的研發(fā)周期,節(jié)約研發(fā)成本,對(duì)開發(fā)新型高效精梳機(jī)具有重要的意義。
[1] 任家智,尹燕芬.棉精梳機(jī)分離羅拉傳動(dòng)機(jī)構(gòu)分析[J].中原工學(xué)院學(xué)報(bào),2006,17(4):12-16.REN Jiazhi,YIN Yanfen.The analysis of detaching roller transmission mechanism on combing machine[J]. Journal of Zhongyuan Institute of Technology,2006,17(4):12-16.
[2] 杜虹,韓鳳萍.精梳機(jī)分離羅拉機(jī)構(gòu)的設(shè)計(jì)與分析[J].鄭州紡織工學(xué)院學(xué)報(bào),1999,10(1):86 -89.DU Hong,HAN Fengping.The design and analysis of detaching roller transmission mechanism on combing machine[J].Journal of Zhengzhou Textile Engineering Institute,1999,10(1):86-89.
[3] 端木賢.E7/4型精梳機(jī)分離運(yùn)動(dòng)分析[J].紡織學(xué)報(bào),1984,5(7):36 -41.DUAN Muxian.Separation of motion analysis of type E7/4 comber[J].Journal of Textile Research,1984,5(7):36-41.
[4] 任家智,郁崇文.E62型精梳機(jī)分離羅拉傳動(dòng)機(jī)構(gòu)工藝性能研究[J].紡織學(xué)報(bào),2004,25(6):32 -34.REN Jiazhi,YU Chongwen.Process performance study for the detaching roller transmission mechanism of E62 combing machine[J].Journal of Textile Research,2004,25(6):32-34.
[5] 任家智.高效能精梳技術(shù)及技術(shù)創(chuàng)新的探討[J].棉紡織技術(shù),2001,29(4):12 -16.REN Jiazhi.Discussion of technology and processing innovation onhigh-efficacy comber[J].Cotton Textile Technology,2001,29(4):12-16.
[6] 任家智,馬馳,張一風(fēng),等.高速節(jié)能精梳技術(shù)的研究與應(yīng)用[J].紡織學(xué)報(bào),2012,34(2):141 -145.REN Jiazhi,MA Chi,ZHANG Yifeng,et al.Research and application of high-speed and energy-saving combing technology[J].Journal of Textile Research,2012,34(2):141-145.
[7] 高中庸,孫學(xué)強(qiáng),汪建曉.機(jī)械原理[M].武漢:華中科技大學(xué)出版社,2011:38-55.GAO Zhongyong, SUN Xueqiang, WANG Jianxiao.Theory of Machines[M].Wuhan:Huazhong University of Science and Technology Press,2011:38 -55.
[8] 華大年,華志宏.連桿機(jī)構(gòu)設(shè)計(jì)與應(yīng)用創(chuàng)新[M].北京:機(jī)械工業(yè)出版社,2008:230-248.HUA Danian,HUA Zhihong.Design and Application Innovation ofLinkage[M]. Beijing:Mechanical Industry Press,2008:230 -248.
[9] 張立彬,楊玉廣,任家智,等.降低JSFA288型精梳機(jī)噪聲及振動(dòng)的研究[J].棉紡織技術(shù),2011,39(3):13-15.ZHANG Libin,YANG Yuguang,REN Jiazhi,et al.Research ofreducing JSFA288 combernoise and vibration [J]. Cotton Textile Technology, 2011,39(3):13-15.
[10] 王榮,湯文成,趙春花.精梳機(jī)鉗板機(jī)構(gòu)的振動(dòng)平衡優(yōu)化[J].制造業(yè)自動(dòng)化,2009,31(12):101 -104.WANG Rong, TANG Wencheng, ZHAO Chunhua.Vibration control and balance optimization of nipper mechanism in comber[J].Manufacturing Automation,2009,31(12):101-104.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
