基于Pro/E的擺線輪參數化設計
2015-12-25 08:30:26劉高明
機械工程師 2015年2期
劉高明
(陜西理工學院 機械工程學院,陜西 漢中723001)
0 引 言
隨著現代工業的發展,普通減速器已不能完全滿足現代工業發展的需要,而結構更加先進合理的擺線針輪行星減速器則因為具有體積小、重量輕、傳動比范圍大、傳動效率高、運轉平穩無噪聲、使用壽命長、結構簡單等優點,而得到廣泛的應用[1]。擺線輪作為構成擺線針輪減速器的重要構件有必要對其展開參數化建模以提高設計生產效率。本文根據短幅外擺線的生成原理在Pro/E中對擺線齒輪進行精確建模,實現了擺線輪的參數化設計。
1 擺線齒輪參數化設計
1.1 短幅外擺線方程的建立
同一條擺線可以用兩種方法形成,現在把它一同表示在圖1中。圖1中假設基圓固定不動,并取基圓的中心Oa為X-Y直角坐標系的原點,設偏心距OaOb=A。當滾圓轉過的角度為φ,滾圓r的絕對轉角為θa,滾圓r的相對轉角為θb,則理論齒廓上任意一點M的坐標為

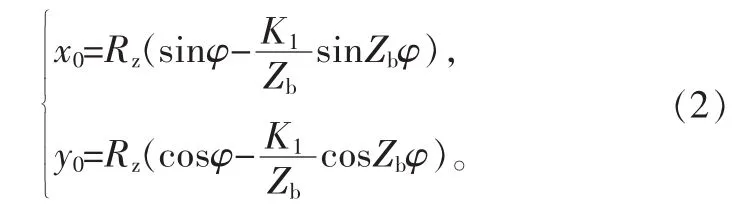
設針齒套的半徑為rz,M點的公法線與X軸的夾角為 y,則實際齒廓上 K 點的坐標(x,y)為

圖1

式中

1.2 基于Pro/E的參數化建模
擺線齒輪的基本參數如表1所示。
為便于建模,取一組基本參數,如表2所示。
1.2.1 擺線輪廓的生成

表1

表2
新建prt文件選擇,首先設置控制參數如圖2所示,然后FRONT面為草繪面,進入草繪環境,依次點擊“曲線”、“從方程”選擇笛卡爾坐標系,依據上述擺線實際輪廓方程式(3)、式(4)在rel.ptd文件中輸入如下程序則可生成精確的17齒擺線輪廓,如圖3。

圖2

圖3
1.2.2 完成實體、參數化控制及族表建立
點擊 “插入”→“掃描”→伸出項→“選取軌跡”“曲線鏈”→“完成”→“確定”→“添加內表面”→“完成”,繪制如圖4所示的掃描截面。完成實體如圖5所示。最后在完成的擺線輪實上添加軸承孔和柱銷孔完成擺線輪繪制如圖6所示。
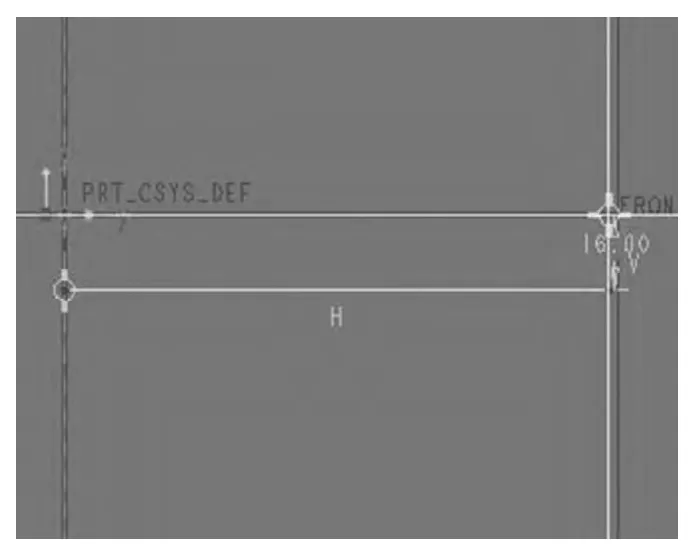
圖4

圖5

圖6
修改“參數”對話框中的參數 RZ、ZA、Q、S即可生成所需參數擺線輪:如改變輪齒數ZA為11、17、23如圖7所示3種擺線輪。也可建立一系列擺線輪族表,如圖8。為某廠6#系列擺線輪,設計時可直接調用,極大地提高設計效率。

圖7
2 結 語
基于Pro/E建立了精確的具有實際廓線的擺線輪參數化模型,通過修改模型參數即可生成不同類型的擺線輪模型,將此模型導入MASTERCAM等專業數控編程軟件就可生成數控加工程序代碼直接用于數控加工,極大地提高設計和生產效率。

圖8
[1] 鄭州工學院機械原理及機械零件教研室.擺線針輪行星傳動[M].北京:科學出版社,1978:12-32.
[2] 葛正浩,楊芙蓮.Pro/ENGINEER Wildfire3.0機械結構有限元分析[M].北京:化學工業出版社,2008:99-112.
[3] 張冬梅,劉敬平.擺線針減速器的建模與仿真 [J].煤礦機械,2013,34(10):76-78.
[4] 田靜云,田衛軍,李郁.基于PRO/E齒輪的參數化設計及有限元分析[J],機械設計與制造,2008(11):35-37.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18