北斗單歷元基線解算與恒星日濾波算法
2015-12-26 06:22:20韓曉飛,馬緒瀛,丁曉光等
測繪通報 2015年4期
引文格式: 韓曉飛,馬緒瀛,丁曉光,等. 北斗單歷元基線解算與恒星日濾波算法[J].測繪通報,2015(4):5-9.DOI:10.13474/j.cnki.11-2246.2015.0099
北斗單歷元基線解算與恒星日濾波算法
韓曉飛1,馬緒瀛2,丁曉光1,張永奇1,蘇利娜1
(1. 陜西省地震局,陜西 西安 710068; 2. 同濟大學,上海 200092)
SingleEpochBaselineSolutionandSiderealFilteringofBeiDou
HANXiaofei,MAXuying,DINGXiaoguang,ZHANGYongqi,SULina
摘要:對單歷元相對定位解算方法進行了研究,編制了相應的北斗數據處理軟件,對兩條1km以內的短基線數據進行了測試。根據基線解算結果提取了測站的多路徑誤差時間序列,并通過最大相關性分析確定了多路徑誤差的周期,在此基礎上提出了適用于北斗系統的恒星日濾波算法。
關鍵詞:北斗衛星導航系統;單歷元基線解算;多路徑誤差;恒星日濾波
中圖分類號:P228.4
收稿日期:2014-04-21
作者簡介:韓曉飛(1982—),男,工程師,主要從事地震觀測、數據分析等工作。E-mail:voldemortpotter@sina.com
一、引言
北斗衛星導航系統(BeiDouNavigationSatelliteSystem,BDS)是中國自行研制的繼美國全球定位系統(GPS)和俄羅斯GLONASS之后第3個成熟的衛星導航系統[1]。2012年底第13、14號衛星的成功運行標志著覆蓋亞太地區的北斗區域衛星導航系統已經建設完成,偽距定位精度可達10m以內,并且初步具備高精度定位能力。GNSS系統具有高精度定位能力,逐漸在各類地形、地貌、地震預警和建筑物變形監測等方面得到廣泛應用。隨著我國北斗系統的完善與高頻(1Hz)、超高頻(20~50Hz)GNSS定位技術的進一步發展,基于相位觀測值的北斗單歷元相對定位技術可以快速、準確地獲得接收機的位置信息,它可以應用于地震學、火山學等領域,越來越多的國內外學者對其數據處理方法和應用前景產生了濃厚的興趣[2]。相對定位技術可以大幅度削弱相關誤差,獲得高精度的定位結果。但是差分技術無法消除多路徑誤差,在局部監測中,布設的基線較短,在消除其他強相關性的誤差后,多路徑誤差便成為影響監測結果的主要誤差源[3-6]。GNSS系統星座多由軌道具有周期特性的衛星構成,靜態觀測站的多路徑等環境誤差將會呈現出周期特性,因此可利用前一天同時段的多路徑誤差改進后一天定位結果的方法(稱為恒星日濾波)[5-6]。本文探索了北斗系統的多路徑誤差周期,在獲得其周期后,給出了基于北斗系統的恒星日濾波方法。試驗結果顯示,該方法對北斗多路徑效應的消除和衛星地形監測具有重要的意義。
二、北斗單歷元基線解算
單歷元基線解算屬于動態相對定位的一種,其觀測方程與靜態相對定位是相同的[7],因為是單歷元解算,考慮到單歷元解算若僅采用載波相位觀測值會導致法方程秩虧,本文同時加入偽距觀測值組建雙頻偽距及載波相位觀測方程。
1. 數學模型
進行雙差后,可消除接收機和衛星鐘差,其觀測方程為[7]

(1)

(2)
式中,下標A、B為測站;上標i、j為觀測衛星。其中,A為基準站;i為參考衛星;下標組合表示對測站作差,上標組合表示對衛星作差;P為偽距觀測值;dX、dY和dZ分別為基線向量的3個坐標改正數;l、m和n分別為3個坐標方向上的方向余弦;λf是f頻率載波所對應的波長;N是載波信號的整周模糊度;I和T分別為電離層延遲改正和對流層延遲改正,當基線長度較短時此兩項誤差可忽略不計。常數項為
(3)
式中,ρ為測站到衛星之間的距離;MP、ML分別為偽距和相位的多路徑誤差;εP、εL分別為偽距和相位的觀測噪聲;雙差觀測值的隨機模型為[8]
(4)
式中,s表示觀測值類型;ns為該類觀測值的衛星數。
2. 模糊度固定方法
進行快速定位時,雖然觀測時間較短,但只要能正確確定整周模糊度,依然能得到高精度的定位結果,因此,基于載波相位觀測值的單歷元基線解算的關鍵在于快速確定整周模糊度,文中采用LAMBDA法進行模糊度搜索。
本文采用了較為成熟的onthefly(OTF)技術進行單歷元短基線動態定位解算。該解算方法可以概括為兩部分:模糊度參數的初始化和固定模糊度后的單歷元定位解算[9]。
3. 基線解算算例分析
采用和芯星通(UNICORE)公司生產的UB240-CORS北斗/GPS雙系統四頻接收機(GPS:L1、L2;北斗:B1、B2)對兩條小于1km的短基線進行了數據采集,一條位于北京的超短基線3.0669m,數據時間段為2012年11月8—10日;另一條位于上海同濟大學的基線,長度為470.3009m,數據時間段為2012年11月8—15日,數據的采樣間隔均為1s。
利用自行編制的北斗數據處理軟件,按1s采樣率分別解算了同濟大學測站11月8—15日、北京測站11月8—10日的實測數據。同時利用Bernese軟件對兩個地區的GPS數據進行了解算,將解算得到的觀測站坐標作為真值開展后續分析。由于篇幅限制,本文只給出上海站11月8日一天觀測數據(采樣率1s,解算歷元86400個)求得的北斗基線相對于標準值的誤差序列,如圖1所示。其他時間段觀測數據的解算結果如圖2所示。
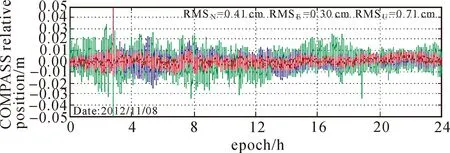
圖1 上海站2012年11月8日北斗基線解算誤差時間序列
由圖1的誤差序列求得北斗基線在北(N)、東(E)、高程(U)各方向上的RMS值分別為0.41cm、0.30cm和0.71cm。
為了評估北斗系統在上海、北京兩站的定位表現,對多天解算結果進行了統計分析,如圖2所示。經統計,上海站6天北斗解算結果N、E、U方向誤差序列的平均RMS值分別為0.42cm、0.31cm、0.80cm;北京站3天北斗解算結果N、E、U方向誤差序列的平均RMS值分別為0.21cm、0.18cm、0.55cm。可以看到,對于這兩條短基線數據,北斗單歷元基線解算得到了較好的結果。
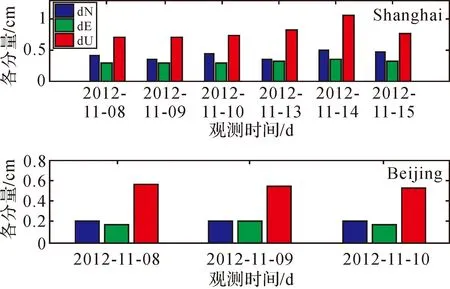
圖2 上海(上)、北京(下)站北斗系統多天基線解算結果坐標三分量RMS統計
三、北斗多路徑誤差周期特性分析
多路徑效應是指北斗信號通過不止一條不同路徑到達接收機天線的現象,即對所期望信號經反射或散射后的復制品的接收。多路徑誤差不僅與觀測環境有關,同時還與衛星的視運動有關。對于靜止的觀測站,其周邊環境長期保持不變,而導航衛星繞地球軌道進行周期性運動,因此觀測站接收機的多路徑誤差具有周期特性,同時與衛星軌道信息高度相關。
1. 基于基線解算結果的北斗多路徑誤差提取
定位解算后的時間序列主要包含載波相位多路徑誤差和隨機噪聲,因此該數據可以分析站點相位多路徑誤差的綜合影響。相對多路徑信號,隨機噪聲信號具有高頻特性,多路徑誤差具有低頻特性,利用隨機噪聲和多路徑信號的頻率特性進行小波濾波提取多路徑誤差。本文采用db10小波進行7層的小波包分解,剔除高頻噪聲信號后合成去噪后的新信號。
2. 北斗多路徑誤差周期特性
為了從理論上探討多路徑誤差的相關性,計算連續多天多路徑誤差時間序列的相關性。
算例采用北京、上海兩站11月8—10日連續3天的基線數據,先分別進行北斗單歷元基線解算,依次獲得第1天、第2天、第3天N、E、U方向誤差的時間序列,然后對原始解算結果進行小波去噪濾波提取相對純凈的多路徑誤差(見表1)。
從表1結果可見,相鄰兩天在相關延遲約為240s附近出現最大相關,略大于相關延遲的理論值236s,隨著間隔天數的增加,最大相關系數值會逐漸減小[10]。如第1天與第3天的相關值比第1天與第2天或第2天與第3天這類相鄰兩天的相關值都要低。說明同一地點,隨著天數增加,衛星幾何條件在發生變化。如上所述,對于靜止觀測站,北斗多路徑效應的周期約為86160s,略少于24h。
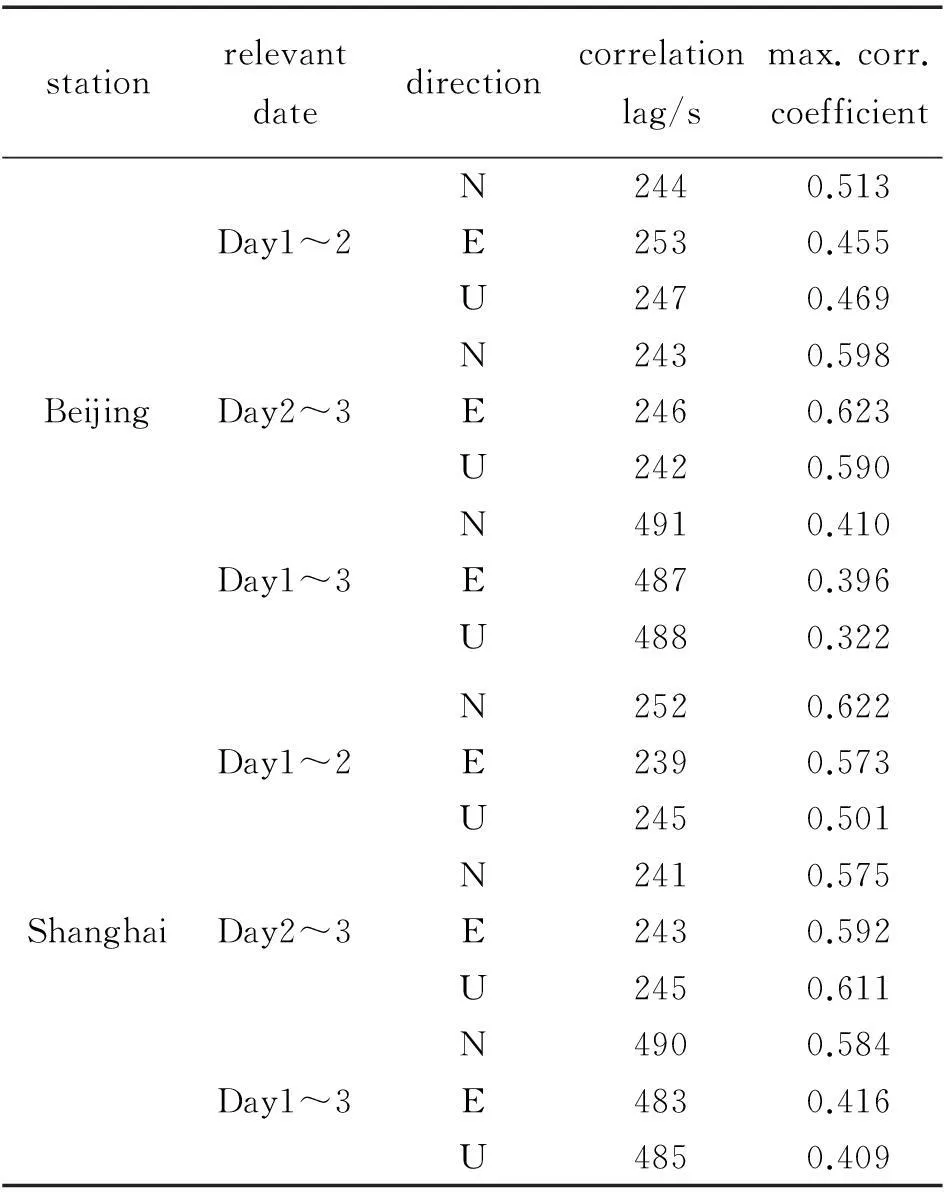
表1 北京、上海站北斗多路徑效應相關延遲統計
3. 多路徑誤差周期與衛星軌道周期的關系
本文介紹了兩種方法來確定各個衛星的軌道周期:廣播星歷法與精密星歷法。
(1) 通過廣播星歷計算軌道重復周期
根據廣播星歷提供的長半軸的平方根和平均角速度攝動參數,由開普勒第三定律得
(5)
式中,a為衛星軌道橢圓長半軸的平方根;GM為萬有引力常數G與地球總質量M的乘積,其值為:GM=398600.4418×109m3/s2;Δn為平均運動角速度的改正量;T0為衛星運行一周的時間;TR為軌道重復周期。利用2012年6月13日至2012年8月1日這段時間的廣播星歷求得在這段時間內北斗衛星的軌道重復周期。
圖3所示分別為GEO、IGSO和MEO三類衛星的軌道重復周期,其中1—5號、6—10號和11、12號衛星分別為GEO、IGSO和MEO衛星。可以看出,每一類衛星的軌道重復周期都各不相同,對于同一顆衛星來說,每天的運動周期也不完全一致。但是對于每一類衛星,其軌道重復周期都在某一常數附近波動。根據統計,GEO、IGSO和MEO衛星的平均軌道重復周期分別為86163s、86162s、46391s,與以前求得的重復周期基本一致[10]。即衛星每天提前時間分別為237s、238s和245s(北斗MEO衛星與GPS系統的MEO衛星有較大差異,與GPS衛星11h 58min的運行周期不同,北斗MEO衛星7d繞地球運行13圈,7d累計提前上一周1715s,平均每天提前245s,該提前時間與GPS的MEO衛星結果基本一致)。
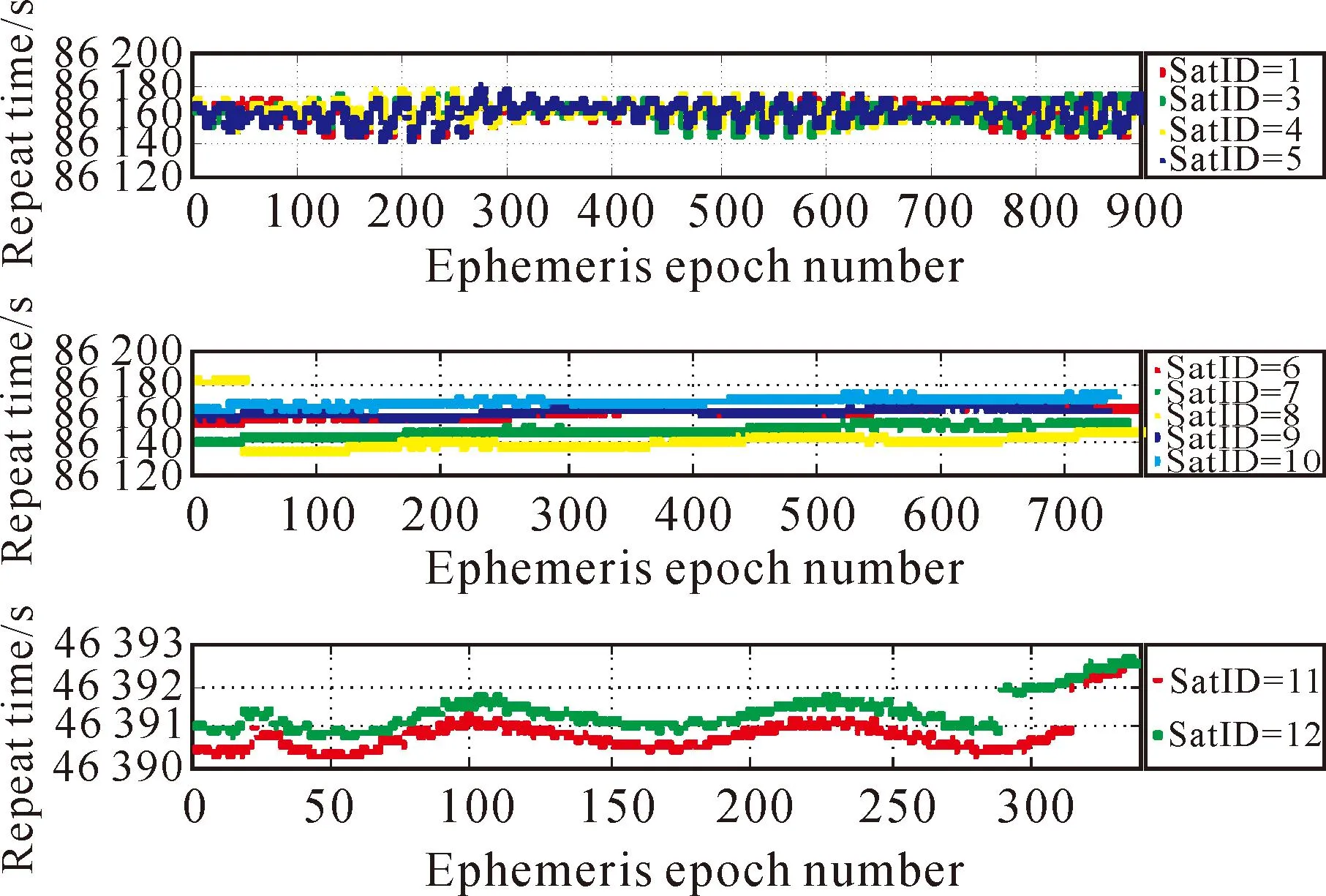
圖3 通過2012年6月13日至8月1日廣播星歷獲得的全部北斗衛星軌道重復周期
(2) 通過精密星歷計算軌道重復周期
利用廣播星歷可以方便、快速地得到衛星的軌道重復周期,然而利用精密星歷求得的軌道重復周期更加準確,同時還克服了廣播星歷計算時并未考慮測站位置信息影響的不足(廣播星歷計算的重復周期僅僅體現了衛星運行一周的時間)。對于長期靜止的觀測站而言,為了進一步的數據處理(如恒星日濾波),我們更關心的是衛星相鄰2天在測站上空同一位置出現的時間間隔(即地面跟蹤重復時間,Duncan Carr Agnew等人在《Finding the repeat times of the GPS constellation》中將它定義為Aspect repeat time,也就是視方位重復時間[10])。
由精密星歷計算衛星軌道重復周期的步驟為:
1) 收集觀測站的測站坐標(X0,Y0,Z0)及要處理的數據相鄰2d的精密星歷。
2) 指定初始參考時間Tr,然后根據精密星歷計算Tr時刻各個北斗衛星的空中位置坐標(xi,yi,zi)及測站和衛星構成的各個方向向量ni。

表2中通過精密星歷計算了2012年11月11日各顆北斗衛星的軌道重復周期。其中,SatID為衛星編號,Tp為精密星歷計算結果。有一點需要指出的是,由于北斗MEO衛星7d繞地球運行13圈(一周運行時間大約12.92h),無法像GPS衛星一樣以天進行對比,一般以一周7d為周期進行比較,因此在表2中未進行對比。
對比以上兩種方法的結果,基于廣播星歷與精密星歷計算得到的衛星軌道重復周期與靜止觀測站北斗多路徑誤差周期大致相同,驗證了多路徑誤差周期與衛星軌道信息高度相關這一結論。

表2 精密星歷計算的各顆衛星軌道重復周期結果 s
四、基于多路徑誤差周期的恒星日濾波
GPS系統星座由多顆MEO衛星構成,衛星軌道運行周期為11h 58min。接收機位置不變時,第二天提前236s時刻的衛星與接收機天線相位中心的幾何構形在理論上與前一天完全相同,靜態觀測站的多路徑等環境誤差將會呈現出周期特性,因此可利用前一天同時段的多路徑誤差改進后一天定位結果的方法稱為恒星日濾波[5-6,11]。
北斗系統衛星星座的構成與GPS系統差異較大,其星座由GEO、IGSO、MEO三種不同類型的衛星構成,導致其衛星軌道的重復特性也與GPS相異,因此基于GPS星座特性的恒星日濾波方法不適用于北斗衛星系統。根據上文北斗多路徑誤差周期計算的結果綜合考慮,北斗衛星的平均提前時間約為240s。
算例根據前文得到的平均重復周期來對基線解算結果進行恒星日濾波。所用數據為上海、北京站連續2d的短基線數據。北斗系統濾波前后的坐標三分量結果如圖4所示(由于篇幅限制,只繪制了上海站北斗系統的濾波結果圖),其他解算結果見表3、表4。
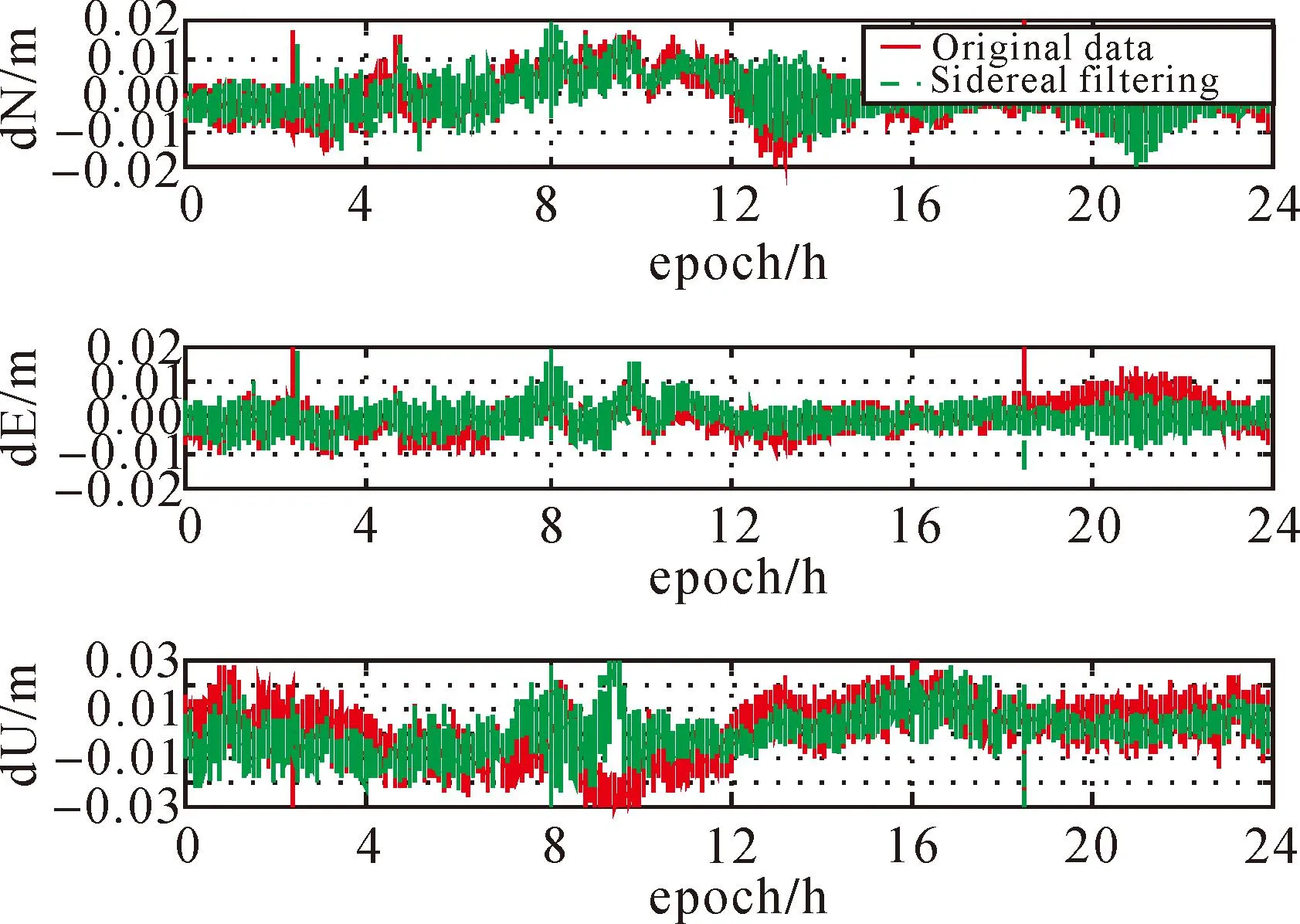
圖4 2012年11月14日上海站濾波前后的坐標三分量時間序列
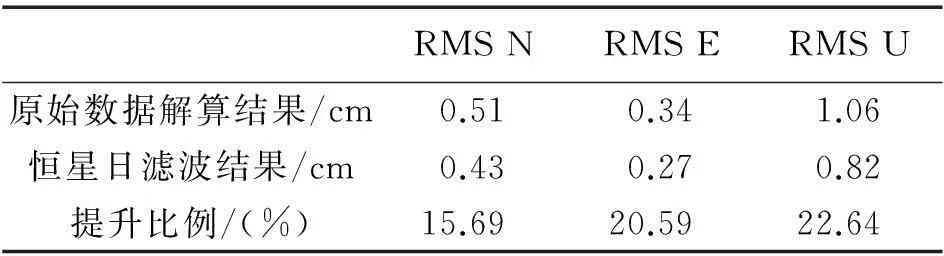
RMSNRMSERMSU原始數據解算結果/cm0.510.341.06恒星日濾波結果/cm0.430.270.82提升比例/(%)15.6920.5922.64
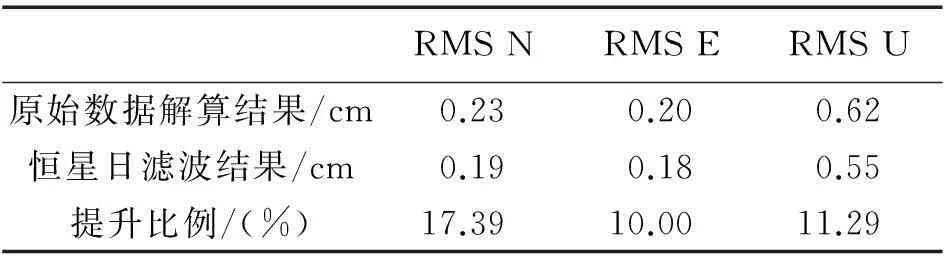
表4 北京站濾波前后的結果統計
可以看出,恒星日濾波消除了部分周期誤差,坐標時間序列的精度有了明顯的提高,這說明此方法在北斗數據處理中是具有實際意義的。
五、結論
本文就北斗單歷元相對定位解算方法進行了研究,對兩條1km以內的短基線數據進行了測試。根據基線解算結果提取了測站的多路徑誤差時間序列,并通過最大相關性分析確定了多路徑誤差的周期,在此基礎上提出了適用于北斗系統的恒星日濾波算法。得出以下結論:
1) 對于1km以內的短基線,北斗單歷元相對定位解算可以達到厘米級甚至毫米級的定位結果,北斗系統已經具備高精度定位能力。
2) 對于靜止觀測站,北斗多路徑效應的周期約為86160s,與衛星軌道信息高度相關。
3) 北斗恒星日濾波算法消除了部分周期誤差,坐標時間序列的精度有了10%~20%的改進,此方法在北斗數據處理中具有實際意義。
參考文獻:
[1]中國衛星導航系統管理辦公室. 北斗衛星導航系統空間信號接口控制文件(測試版)[R]. 北京: [s.n.], 2011.
[2]殷海濤, 甘衛軍, 肖根如. 恒星日濾波的修正以及對高頻GPS定位的影響研究[J]. 武漢大學學報:信息科學版, 2011, 36(5): 609-611.
[3]劉思慧, 樊婧琦, 歐鋼, 等. 多徑效應的動態特性對碼跟蹤環路的影響分析[J]. 測繪學報, 2011, 40(S0): 89-94.
[4]王夢麗, 王飛雪. 三頻電離層延遲改正中多路徑誤差和觀測噪聲的削弱算法[J]. 測繪學報, 2008, 37(4): 418-422.
[5]CHOI K, BILICH A, LARSON K M, et al. Modified Sidereal Filtering: Implications for High-Rate GPS Positioning[J]. Geophysical Research Letters,2004,31(22). DOI: 10.1029/2004GL021621.
[6]RAGHEB E A, CLARKE P J, EDWARDS S J. GPS Sidereal Filtering: Coordinate and Carrier Phase Level Strategies[J]. Journal of Geodesy,2007,81(5): 325-335. DOI: 10.1007/s00190-006-0113-1.
[7]李征航, 黃勁松. GPS測量與數據處理[M]. 武漢: 武漢大學出版社, 2005.
[8]魏子卿, 葛茂榮. GPS相對定位的數學模型[M]. 北京: 測繪出版社, 1998.
[9]胡叢瑋, 劉大杰. 單歷元確定GPS整周模糊度的分析[J]. 南京航空航天大學學報, 2001, 33(3): 267-271.
[10]MA X Y, SHEN Y Z. Multipath Error Analysis of COMPASS Triple Frequency Observations[J].Positioning,2014,5(1):12-21.DOI:10.42361/pos.2014.51002.
[11]AGNEW D C, LARSON K M. Finding the Repeat Times of the GPS Constellation[J]. GPS Solutions, 2006, 11(3): 71-76.DOI: 10.1007/s10291-006-0038-4.

2015北京國際城市管線展覽會將于6月在京舉辦
[本刊訊]由中國城市規劃協會地下管線專業委員會和商務部經濟技術交流中心主辦的2015北京國際城市管線展覽會(官方網站:www.dxguanxian.org),將于2015年6月16—18日在北京國際會議中心舉辦。“北京國際城市管線展覽會—CIUP EXPO”立足中國管線產業發展,注重管線全產業鏈建設,倡導管線市場健康繁榮,推動行業自主技術創新和產業化。
2014年11月14—16日曾在北京召開了首屆北京國際城市管線大會,并同期召開了首屆北京國際城市管線展覽會,會議主題為“智慧管線與城市安全”。在首屆大會上,一大批管線先進企業集體亮相于展會,把新技術、新產品統一展示給中外賓客,全方位展示了我國管線行業國際化視野和戰略成果,打造管線行業全產業鏈展示與交流平臺。首屆展會近150家參展廠商,3天共接待專業觀眾1600多人,展會期間共舉辦了11場主題和專題報告會。
2015城市管線大會將以“共建、共享=互聯網+時代下的智慧管網”為主題,全面展示我國管線行業的最新發展成果,涵蓋給水、排水、燃氣、熱力、石油、石化、電力、通信管線以及地下工程等領域的城市管線綜合解決方案。而同期舉辦的城市管線展覽會,還將舉辦多場高水平、高層次、高規格的產業論壇,分別涵蓋給排水、燃氣、石油石化、智慧生態、安全管理、工程施工等主題。
(本刊編輯部)
