穩態視覺誘發電位的腦機接口范式及其信號處理方法研究
2015-12-27 02:08:53徐光華張鋒謝俊李葉平韓丞丞李黎黎
西安交通大學學報 2015年6期
關鍵詞:信號
徐光華,張鋒,謝俊,李葉平,韓丞丞,李黎黎
(1.西安交通大學機械工程學院,710049,西安;2.西安交通大學機械制造系統工程國家重點實驗室,710054,西安)
?
穩態視覺誘發電位的腦機接口范式及其信號處理方法研究
徐光華1,2,張鋒1,謝俊1,李葉平1,韓丞丞1,李黎黎1
(1.西安交通大學機械工程學院,710049,西安;2.西安交通大學機械制造系統工程國家重點實驗室,710054,西安)
在概述國內外穩態視覺誘發電位腦機接口技術研究的基礎上,針對傳統穩態視覺誘發電位(SSVEP)在腦-機接口(BCI)系統應用中存在的問題,在范式設計方面,分別提出了基于牛頓環、高頻組合編碼和幅值調制的SSVEP的3種BCI范式。針對腦電信號微弱、辨識困難的問題,提出了基于隨機共振機制的穩態運動視覺誘發電位增強方法;針對高頻組合編碼穩態視覺誘發電位(CCH-SSVEP)新范式響應信號的非平穩、弱信號特征,提出基于改進的希爾伯特黃變換的CCH-SSVEP響應信號處理方法,提高了識別率。在系統應用方面,將牛頓環運動刺激范式與運動場景相結合,設計了場景結合導航技術,相對于傳統方法,將刺激目標關聯具體的物理位置,導航效率顯著提升,將運動場景與刺激目標結合的所見即所得的方式提升了用戶預選目標效率以及路線規劃能力,同時也有利于用戶集中注意力,提高腦電信噪比。最終,將該技術成功地應用于殘疾輪椅的腦電導航控制中,取得了令人滿意的效果。
穩態視覺誘發電位;腦-機接口;牛頓環;調制
穩態視覺誘發電位(SSVEP)[1]本質上是外界周期性的視覺刺激誘發大腦視覺中樞系統的周期性響應,相比腦-機接口(BCI)系統中的運動想象(MI)、P300等其他的幾種常見范式,SSVEP由于在使用中具有易用、少電極、無需訓練以及穩定性高等優勢[2],近年來被廣泛應用于BCI系統研究中。使用SSVEP來控制腦-機接口系統的基本思想可以追溯到30年前,作為SSVEP-BCI的第一篇公開出版物[3]首次提出將基于SSVEP振幅的刺激應用于BCI的閉環反饋控制系統。隨后,國內外相關學者開始對基于SSVEP的BCI技術展開研究,經過近幾十年來的研究發展,文獻[4]開發了第一個基于SSVEP的無損BCI系統,設計者在此系統中設置了兩個閃爍的按鈕顯示在電腦屏幕上,用戶可以通過簡單的注視要選擇的按鈕即可。清華大學[5]最早在國內開始SSVEP-BCI技術的研究,隨后西安交通大學[6-17]、上海交通大學[6]、電子科技大學[7]、天津大學[18]等也陸續開展SSVEP-BCI技術及應用研究。盡管基于SSVP-BCI系統的研究已經取得了不小的進步,但仍存在一些問題。例如:SSVEP傳統刺激范式由于有效頻帶受限,不適合呈現更多目標;傳統SSVEP依賴高強度光閃爍視覺刺激進行誘發,易造成被試者視覺疲勞、環境干擾大等不足,導致系統性能不穩定、信息傳輸率低等問題。
本文概述了國內外穩態視覺誘發電位腦機接口技術,重點研究基于不同視覺誘發電位范式的輪椅腦電導航接口技術及其信號處理算法,并進行新的輪椅腦電導航接口技術的探索。
1 范式設計
1.1 基于牛頓環的穩態視覺誘發電位腦-機接口范式
傳統SSVEP依賴光閃爍產生的視覺刺激進行誘發,需要較強的光強度,容易造成使用者不適,引發大腦適應性效應,即大腦對刺激信號的響應隨著刺激的持續不斷降低,不適宜自然光條件下及長期使用的腦-機交互場合。本研究基于大腦視覺系統的運動感知能力,采用低閃爍、用戶操作不易疲勞的穩態運動翻轉視覺刺激范式誘發周期性的穩態電位(SSMVEP),并應用于腦-機接口,實現了穩態誘發電位與運動感知腦-機接口的有機結合。
采用光學中常見的牛頓環作為刺激范式,牛頓環運動刺激目標為明暗相間同心圓環,明亮區域和暗區域面積相等,在刺激呈現過程中,牛頓環相位按正弦方式進行調制,在收縮和擴張兩個方向上形成周期往復振蕩運動,收縮和擴張運動的翻轉頻率定義為刺激頻率。考慮到在屏幕刷新率為100 Hz的條件下,刺激頻率為14 Hz的牛頓環運動刺激如圖1所示。

圖1 運動翻轉刺激范式
采用8.10、9.80、12.25和14.00 Hz這4個翻轉頻率分別賦予4個刺激目標,通過典型相關算法(CCA)判別受試者注視的目標。6名受試者在單輪實驗時長4 s情況下的平均識別正確率為86%。系統測試結果表明,最優信息傳輸率條件下的目標平均識別時間約為3.5 s,平均信息傳輸率約為16 bit/min。

圖2 大腦響應的時間演化及其指數衰減擬合圖
每名受試者的大腦穩態電位信號的時間演化及其指數衰減擬合參照圖2,20輪實驗的總時長為100 s。從圖2可以看出,大部分情況下受試者的大腦響應在20輪實驗過程中沒有明顯的下降趨勢,指數衰減曲線多為直線形式,表明該研究能夠較好地避免神經適應性及大腦響應信號的降低,更加適宜于長期使用的腦-機交互場合。
1.2 基于高頻組合編碼的穩態誘發電位腦-機接口范式
針對目前基于低頻SSVEP-BCI系統存在目標數目少、刺激時間長、易誘發疲勞和癲癇等不足導致的系統穩定性不高、信息傳輸率低等問題,提出了基于高頻組合編碼穩態視覺誘發電位(CCH-SSVEP)的腦-機接口技術,基于高頻組合編碼穩態視覺誘發電位的本質是組合編碼的思想,在高頻段,采用信噪比高的幾個刺激單元通過排列組合出多個刺激序列,理論上可實現m個刺激表達,呈現mm個刺激。這不僅解決了單頻率呈現模式下目標數目受限的問題,而且利用了高頻SSVEP刺激閃爍的融合效應,減少了受試者的疲勞度,也降低了使用者誘發癲癇的可能性。CCH-SSVEP新范式如圖3所示,在該范式中,采用頻率高于25 Hz的頻段作為基本單元,為了說明新范式的可行性,且不失一般性,這里選3個基本刺激單元(即m=3)。每個頻率單元通過20個周期的屏幕幀圖像的亮和滅呈現,單次識別任務選取10個刺激序列長度,以上僅對范式設計做概述,詳細過程參考文獻[12],實驗結果見下面信號處理部分。

圖3 基于高頻率組合編碼的SSVEP范式
1.3 基于幅值調制視覺穩態誘發電位腦-機接口范式
傳統穩態視覺誘發刺激在顯示器上呈現,是通過圖像特定頻率(刺激頻率)閃爍方式實現的,但由于采用一個頻率表示一個目標任務的刺激范式簡單,同時由于顯示器物理參數以及目標識別率的限制,僅可以使用有限的頻率呈現任務目標,使得可呈現的任務目標數受限。此外,傳統SSVEP辨識效率低,需要多次刺激信號累加,嚴重影響了實時辨識能力。因此,針對傳統SSVEP范式頻帶窄、目標數目受限、信噪比低、不適合在顯示屏上呈現更多目標等不足,圍繞如何在有限頻帶內增加可呈現的目標數目,提升SSVEP技術的信息傳輸率的核心問題,本文提出了基于幅值調制視覺誘發電位的范式(AMVEP)。圖4是CRT顯示器呈現AMVEP刺激的時序原理圖,每個柱狀代表一個載波,幅值大小代表載波灰度。利用顯示器交替閃爍的圖像亮度按照灰度值(0~255)變化,實現特定載波頻率f0上的低頻幅值調制刺激,f0是SSVEP響應最優頻段特征頻率,如圖4所示。載波本質是方波,由n幀圖像組成,其中ng為亮幀數圖像,n0為滅幀數圖像。
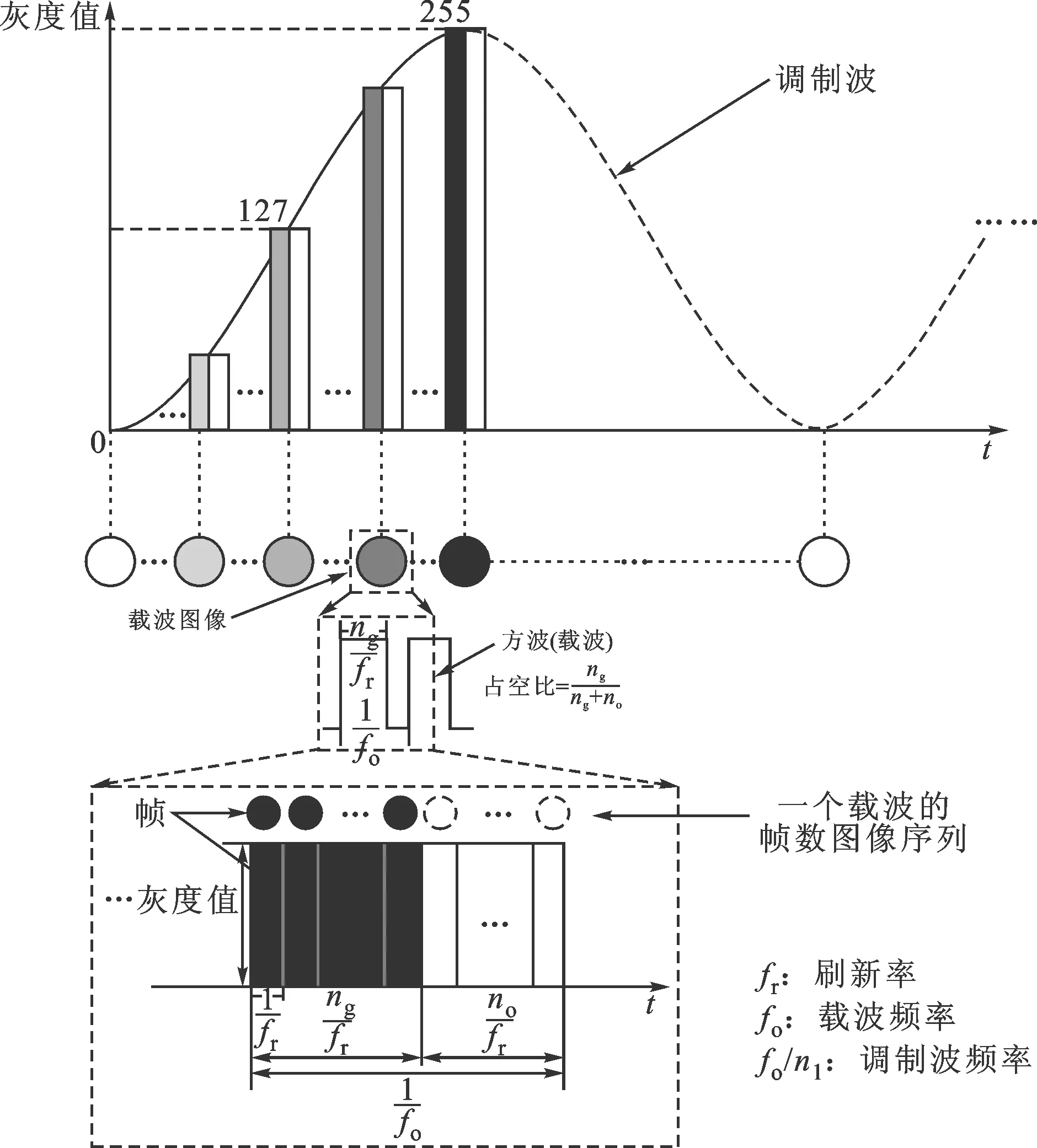
圖4 基于幅值調制SSVEP范式
本文提出基于幅值調制的SSVEP腦-機接口新范式,借鑒調制思想,采用誘發響應強度最優頻帶特征頻率12.5 Hz為載波和低頻調制信號形成幅值調制刺激范式,并對幅值調制的數目、分辨率及帶寬進行理論計算及驗證,為實驗設計提供了理論依據。同時,對幅值調制實驗中測點的導聯、數據長度等參數進行優化,并提出優化策略。所提出的基于幅值調制SSVEP刺激范式,不僅提高了響應信號的信噪比,同時通過載波與調制波的組合大大提升了目標數目,解決了傳統單一頻率呈現目標數量受限的問題。在此基礎上,提出與之相適應的特征提取與識別方法,5個受試者離線與仿真在線識別率均在80%以上,在線仿真平均信息傳輸率為35 bit/min,相比其他范式有所提高。本文所提出的基于幅值調制的SSVEP腦-機接口范式為SSVEP范式設計提供了一種新的思路,并通過實驗得到驗證,詳細過程請參考文獻[15]。
2 信號處理
2.1 基于隨機共振機制的穩態運動視覺誘發電位增強方法
頭皮腦電信號容易受到各種電生理信號及噪聲干擾,造成頭皮誘發電位信號微弱,多依賴算法改進實現系統性能提升,性能拓展空間小,針對此問題,本文提出了基于隨機共振機制的穩態運動視覺誘發電位增強方法。該方法是隨機共振技術在穩態視覺誘發電位中的創新應用,通過在周期視覺輸入中引入噪聲的方式,實現在一定程度上對大腦動力學特性的擾動,實現穩態電位的有效增強,為實現高性能腦-機接口技術開辟了新的思路。
采用8.57、12.00和15.00 Hz這3個翻轉頻率分別賦予3個刺激目標,刺激目標采用單環形,以服從高斯分布的二維噪聲點掩蔽刺激目標,噪聲點更新頻率同步于屏幕刷新率,噪聲點的灰度級在0~255之間,噪聲點的二維灰度均值為128,噪聲強度以高斯分布標準差(NSD)表征,如圖5所示。
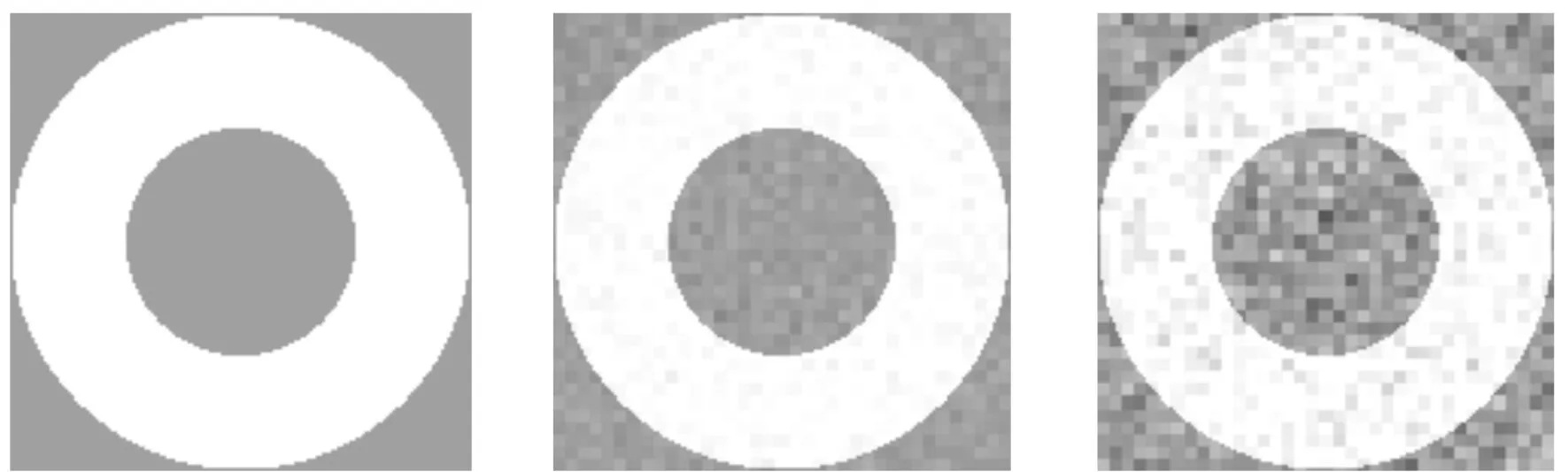
(a)噪聲強度為0 (b)噪聲強度為8 (c)噪聲強度為24

(d)噪聲強度為40(e)噪聲強度為48(f)噪聲強度為56圖5 不同強度視覺噪聲掩蔽示意圖
本研究對4名受試者(S1~S4)進行了實驗,單輪實驗時長在2~10 s范圍內可變,根據在線實驗得到的正確率與正確檢測時間關系曲線見圖6。圖6表征了4名受試者在無視覺噪聲及最優視覺噪聲強度下操作腦-機接口時的性能,由于腦-機接口精度和效率的提高分別能夠通過較高的正確率及較短的正確檢測時間得到體現,因而誤差棒越接近正確率與正確檢測時間關系圖左上角時,表明腦-機接口系統具有越高的性能。從圖中可以看出,大部分受試者在最優視覺噪聲強度下性能提升較為明顯,表明該技術能夠顯著提升現有腦-機接口的精度和效率,創新提高腦-機接口技術的實用化水平。
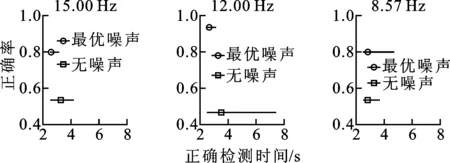
(a)受試者S1
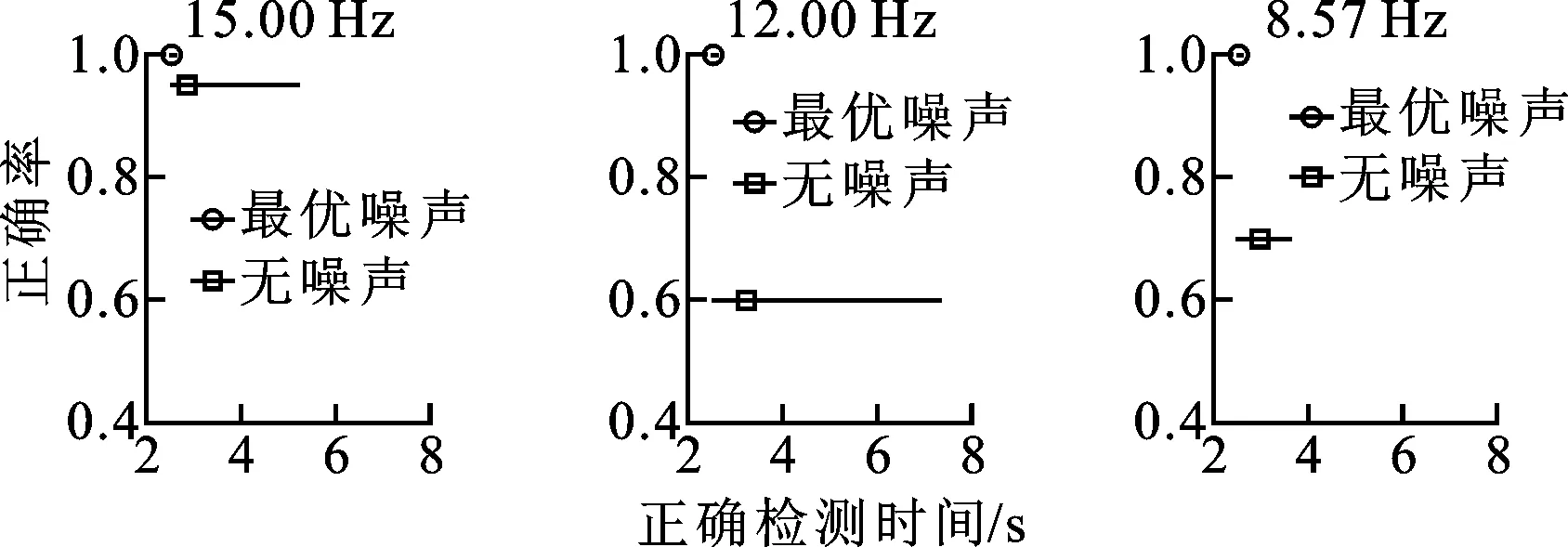
(b)受試者S2
(c)受試者S3
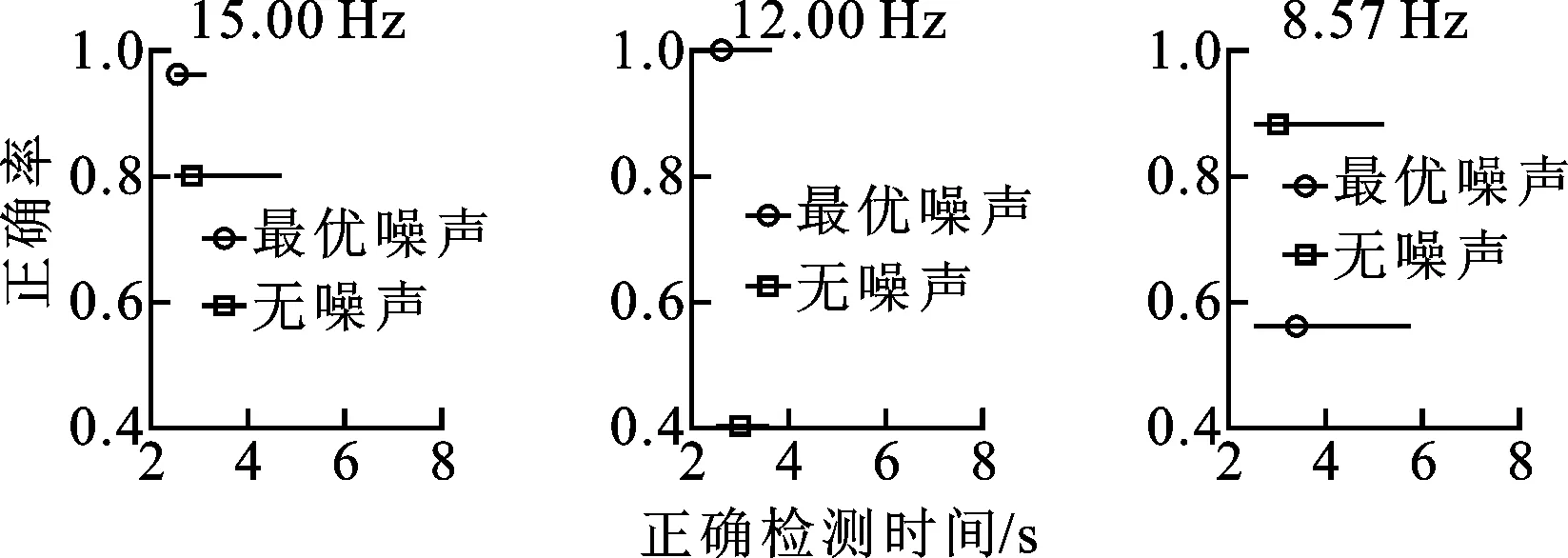
(d)受試者S4圖6 腦機接口在線性能
2.2 基于改進希爾伯特黃變換(IHHT)的CCH-SSVEP響應信號處理方法
穩態視覺誘發電位的本質告訴我們,CCH-SSVEP新刺激范式響應信號本質上應該包含不同頻率組合編碼的時序信息,加上腦電信號本身微弱的屬性,從信號處理的角度,該響應應該屬于非線性、非平穩的弱信號。因此,要從這樣的信號中提取出我們需要的信息,傳統的譜方法無法滿足需求。本文提出的基于IHHT變頻腦電信號CCH-SSVEP響應信號處理方法(如圖7所示),通過刺激頻率的差異組合優化,實現變頻腦電信號的特征提取及局部頻譜極值目標辨識。
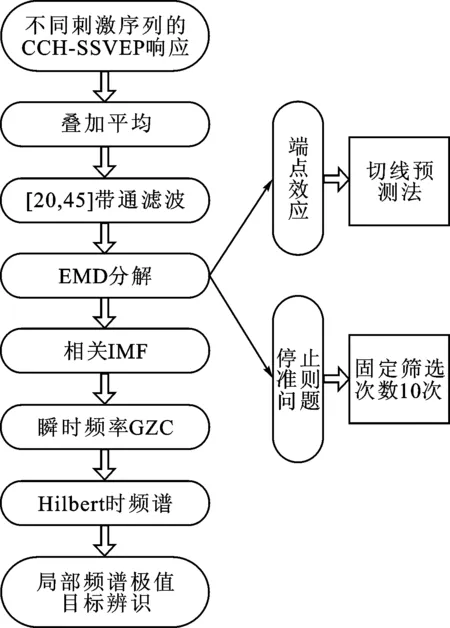
圖7 基于IHHT變頻的腦電信號特征提取與辨識方法
HHT的核心是經驗模態分解(EMD)方法。EMD的本質是基于信號的局部特征時間尺度,能把復雜信號分解為簡單信號(即本征模式函數IMF)的疊加,因此EMD方法是自適應的信號處理方法。更重要的是,對信號進行EMD分解后,使得瞬時頻率(IF)具有了物理意義。這樣就可以對每一個IMF進行Hilbert變換,從而可以求出每一個IMF隨時間變化且具有物理意義的瞬時頻率和瞬時幅值,這些瞬時頻率和瞬時幅值可以揭示信號的內在特征,最后得出隨時間和頻率變化的幅值H(w,t),稱為Hilbert譜。HHT主要的創新點在于提出了EMD,使得信號的瞬時頻率具有了物理意義,從而能得到非平穩信號的完整的時頻分布,因此非常適合處理CCH-SSVEP誘發的非線性、非平穩的弱響應信號。基于IHHT變頻腦電信號CCH-SSVEP響應信號處理方法的步驟如圖7所示,包含7個步驟,具體IHHT算法過程請參考文獻[13]。此處由于篇幅限制簡述如下:針對變頻腦電的EMD端點問題,采用邊界預測法和傳統方法進行對比;針對EMD停止準則的應用選擇問題,采用固定篩選次數;針對變頻腦電信號,選擇GZC(Generalized Zero-Crossing)算法計算瞬時頻率;最后通過刺激頻率的差異組合優化[13],實現CCH-SSVEP響應信號的高效識別。3個基本頻率單元基25、33.33、40 Hz,相應編號為1、2、3,從27種的組合方式中選出差異化頻率的組合刺激序列依次為123、132、213、231、312、321,其單次響應時域信號如圖8所示。經過基于IHHT變頻腦電信號特征提取方法(見圖7)處理后的CCH-SSVEP新范式刺激下單次響應信號的Hilbert譜圖見圖9,識別率為100%。
3 系統應用
3.1 場景結合導航技術
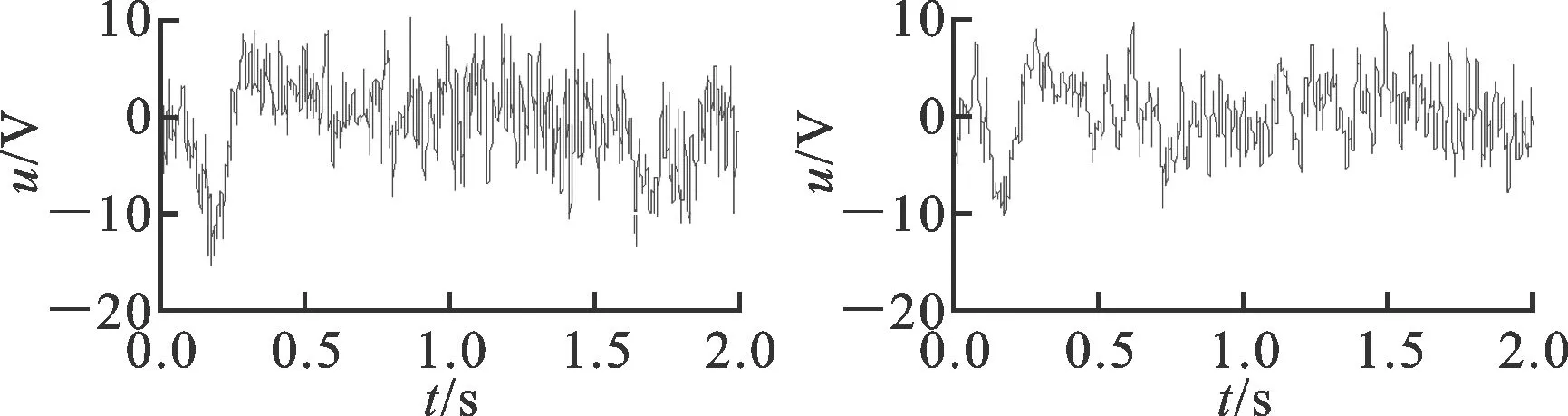
(a)組合序列123 (b)組合序列132
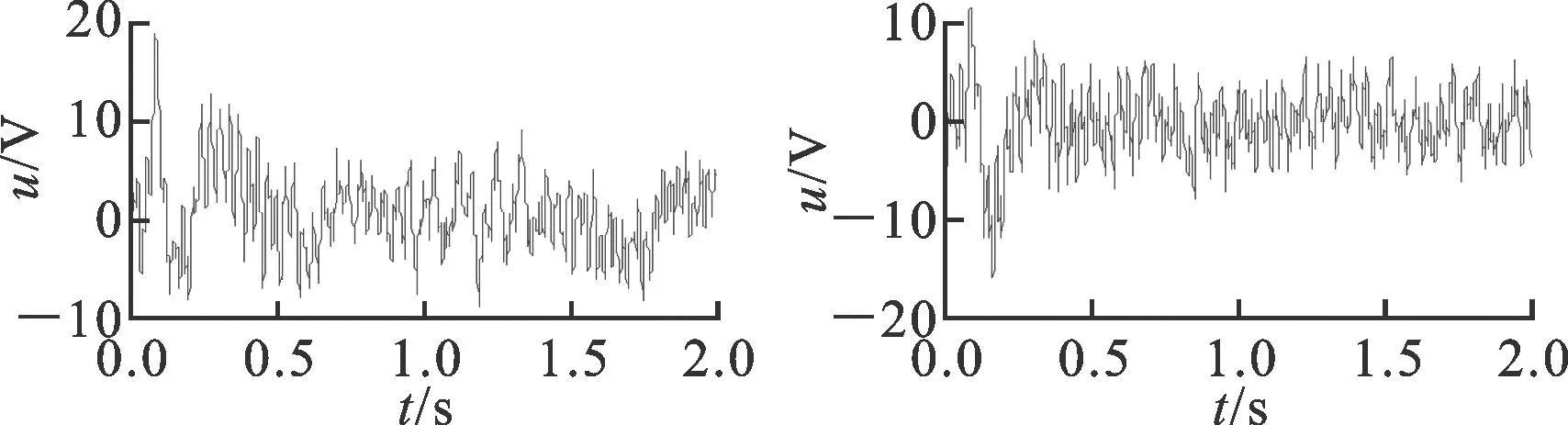
(c)組合序列213 (d)組合序列231
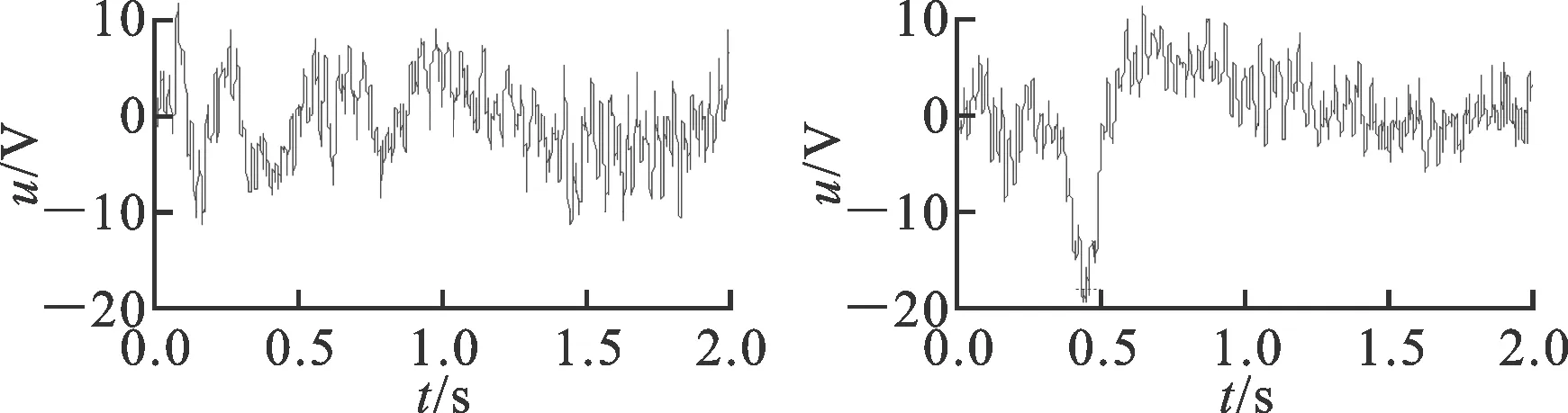
(e)組合序列312 (f)組合序列321圖8 經過差異組合優化后的CCH-SSVEP響應信號
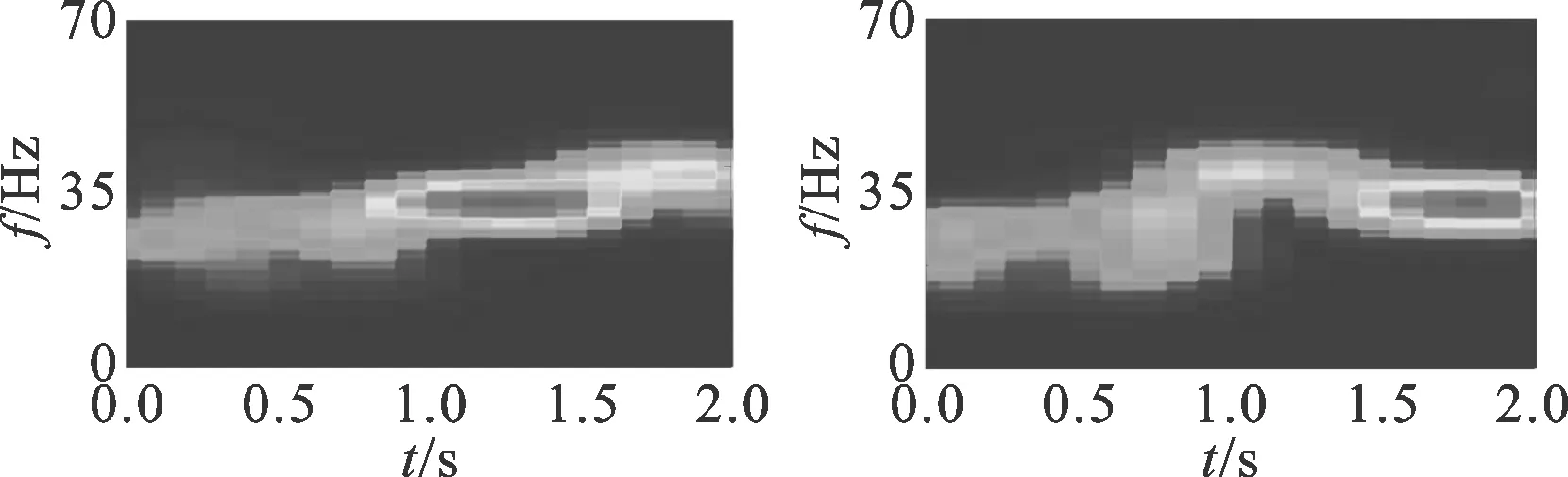
(a)Hilbert譜123 (b)Hilbert譜132
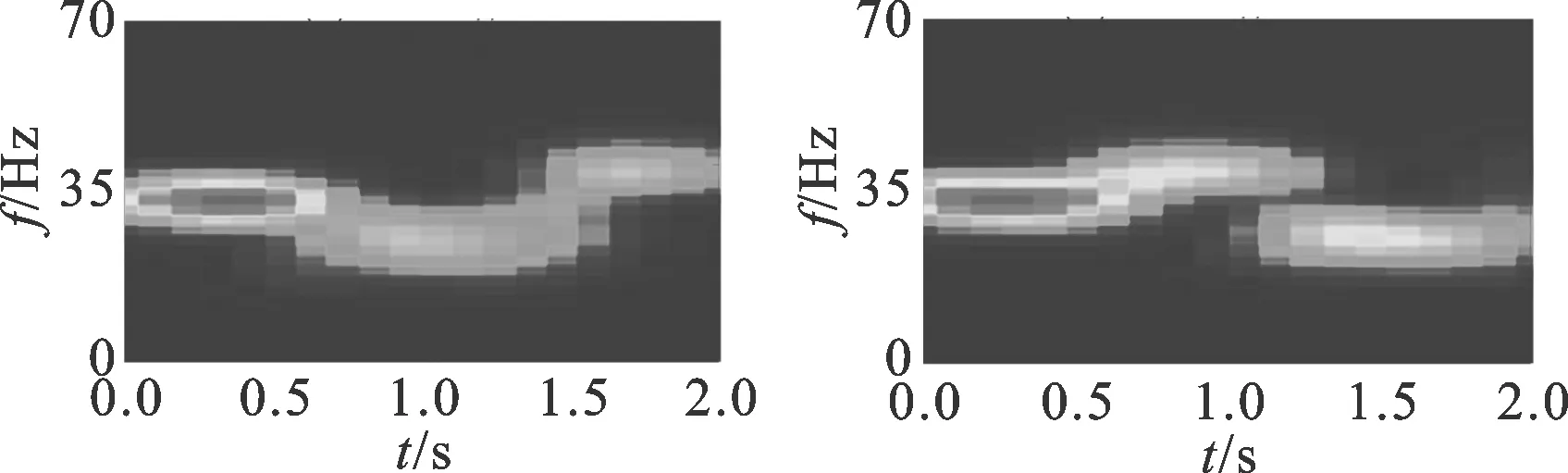
(c)Hilbert譜213 (d)Hilbert譜231
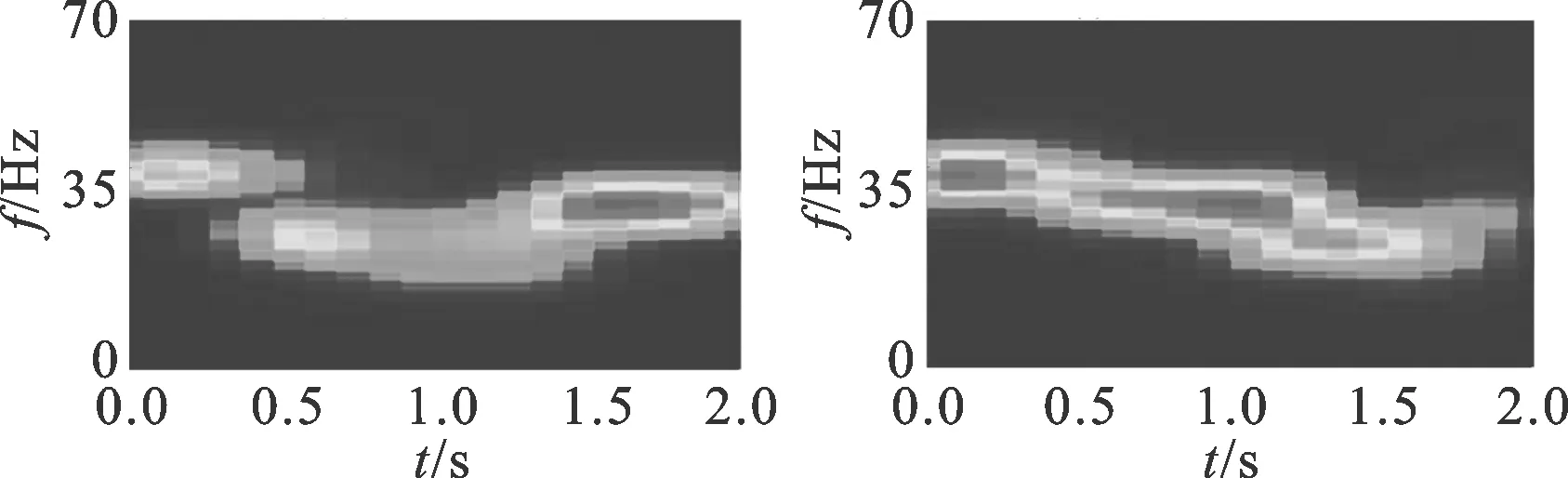
(e)Hilbert譜312 (f)Hilbert譜321圖9 經過差異組合優化的CCH-SSVEP的Hilbert時頻譜
本文將牛頓環運動刺激范式與運動場景相結合,設計了一種高層次的導航技術,稱之為場景結合導航技術。相對于傳統方法,該方法具有兩個顯著特點:①將刺激目標關聯具體的物理位置,用戶選定期望場景目標后,輪椅即能精確地運動到相應的目標位置,使用傳統導航方法運動到相同位置則需要若干次轉彎和若干次平移調整,耗費大量的時間;②將運動場景與刺激目標結合,這種所見即所得的方式使用戶不需要估測就能預選出期望的刺激目標,節約用戶預選目標的時間。
圖10示意了場景結合導航技術的原理。一個廣角攝像頭安裝在輪椅的前部,實時采集輪椅前方的場景圖像,呈現在筆記本電腦屏幕上。同時,若干刺激目標呈現在場景圖像之上,這些刺激目標在圖像中的位置與輪椅前方地面相對應的物理位置一一關聯。
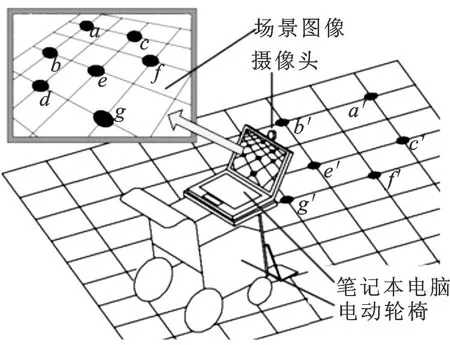
圖10 場景結合導航方法示意圖
3.2 腦控輪椅系統集成
本文將普通電動輪椅加以改造,集成了一個具備一定實用性的腦控輪椅系統。其基本組成為電動輪椅、輪椅控制器、筆記本電腦、腦電采集設備、編碼器、廣角攝像頭等部件,見圖11。

圖11 腦控輪椅的硬件組成
3.3 實驗驗證
為了驗證本研究中腦控輪椅的實用性和高效性,本文選擇現實生活中的場所進行測試,規劃了復雜程度不同的3條路徑。5名年齡在23~32歲之間的男性研究生參與了該驗證實驗,對于每條路徑,要求他們各自測試5次。實驗結果表明,每位被試者都能順利完成各條路徑,說明該腦控輪椅已經具備一定的實用性。本文還對場景結合導航方法和傳統導航方法進行了對比實驗驗證,場景結合導航方法比傳統方法節約(44.1±2.8)%的指令數和(42.1±1.0)%的路線完成時間。
4 結 論
本文概述了國內外穩態視覺誘發電位腦機接口技術,重點研究基于不同視覺誘發電位范式的輪椅腦電導航接口技術及其信號處理算法,并進行了新的輪椅腦電導航接口技術的探索。
針對傳統SSVEP在BCI系統中應用存在的問題,在范式設計方面提出以下方式。
(1)針對傳統SSVEP易造成被試者視覺疲勞、環境干擾大等不足,提出了基于運動翻轉視覺刺激的穩態運動誘發電位(SSMVEP)刺激范式。其優點是保證低頻閃爍刺激條件下的抗疲勞,并采用等光強的運動刺激提高了環境適應性,從而保證腦電導航的可靠性,后續研究中在響應信號增強方面有提升空間,可應用于需要長時間在室外強光干擾等復雜環境下工作同時要求高可靠性的腦-機接口導航場景中。
(2)針對目前基于低頻SSVEP-BCI系統存在目標數目少、易誘發疲勞和癲癇等可能的不足,提出了基于高頻組合編碼穩態視覺誘發電位(CCH-SSVEP)刺激范式。其優點是解決單頻率呈現目標數量受限的問題,增加了傳統SSVEP的目標數和可選范圍,并利用高頻SSVEP的刺激閃爍融合效應,提高了使用者的舒適度,有效降低視覺疲勞影響及誘發癲癇的可能。在更高頻率段,后續研究中還有提升的空間,可應用于同時兼具高效和無損性能要求的腦-機接口導航場景中。
(3)針對基于傳統SSVEP腦-機接口系統范式單一、可用頻帶窄、信噪比低等不足導致的系統穩定性不高、信息傳輸率低的問題,提出基于幅值調制編碼穩態視覺誘發電位(AMVEP)刺激范式。其優點是:解決了傳統SSVEP有效頻帶受限、信噪比低的問題,優選SSVEP響應頻率為載波與低頻信號形成組合調制刺激,除原有的頻率信息外,增加了幅值變化的調制信息;響應信號信噪比高,在保證辨識準確率的基礎上,大大提升刺激目標數,從而獲取了較高的信息通訊傳輸率。在后續研究中關于同一載波上可調制多個調制頻率仍有提升空間,可應用于需要大量刺激目標且穩定性和信息傳輸率有較高要求的腦-機接口導航應用場景中。
針對不同SSVEP范式的EEG信號特征,在信號處理方面進行如下處理。
(1)頭皮腦電信號容易受到各種電生理信號以及其他噪聲的干擾,造成頭皮誘發電位信號微弱、辨識困難,多依賴算法改進實現系統性能提升,性能拓展空間小,限制腦-機接口實用化水平。針對此問題,提出了基于隨機共振機制的穩態運動視覺誘發電位增強方法,以視覺運動誘發電位作為視覺系統的典型輸出形式,通過在穩態周期視覺輸入中引入噪聲的方式,實現一定程度上對大腦動力學特性的擾動,實現穩態運動視覺誘發電位的有效增強,為優化視覺響應并實現高性能腦-機接口技術開辟了新的思路。
(2)針對CCH-SSVEP新范式響應的非線性、非平穩弱信號特征,提出了基于IHHT的CCH-SSVEP響應信號處理方法,提高了識別率,最后通過刺激頻率的差異組合優化,實現了CCH-SSVEP響應信號的高效識別。
在系統應用方面:針對傳統SSVEP-BCI系統導航效率低下的問題,提出將牛頓環運動刺激范式與運動場景相結合,設計了一種高層次的導航技術,稱之為場景結合導航技術。相對于傳統方法,將刺激目標關聯具體的物理位置,導航效率顯著提升;將運動場景與刺激目標結合的所見即所得的方式提升了用戶預選目標效率以及路線規劃能力,同時也有利于用戶集中注意力,提高腦電信噪比。
[1]VIALATTE F, MAURICE M, DAUWELS J.Steady-state visually evoked potentials: focus on essential paradigms and future perspectives [J].Progress in Neurobiology, 2010, 90(4): 418-438.
[2]WANG Yijun, GAO Xiaorong, HONG Bo, et al.Brain-computer interfaces based on visual evoked potentials [J].IEEE Engineering in Medicine and Biology Magazine, 2008, 27(5): 64-71.
[3]REGAN D.Electrical responses evoked from the human brain [J].Scientific American, 1979, 241(6): 134-146.
[4]MIDDENDORF M, MCMILLAN G, CALHOUN G, et al.Brain-computer interfaces based on the steady-state visual-evoked response [J].IEEE Transactions on Rehabilitation Engineering, 2000, 8(2): 211-214.
[5]CHENG Ming, GAO Shangkai.An EEG-based cursor control system [C]∥Annual International Conference of the IEEE Engineering in Medicine and Biology.Piscataway, NJ, USA: IEEE, 1999: 669-699.
[6]黃淦.生物表面電信號建模、分析及其在人機交互中的應用 [D].上海: 上海交通大學, 2013.
[7]張楊松.基于穩態視覺誘發電位的腦機制及腦-機接口研究 [D].成都: 電子科技大學, 2013.
[8]XIE Jun, XU Guanghua, WANG Jing, et al.Addition of visual noise boosts evoked potential-based brain-computer interface [J/OL].Scientific Reports: 4, 2014(4953) [2014-11-10].http:∥www.nature.com/srep/2014/140514/srep04953/full/srep0953.html[9]LI Yeping, XU Guanghua, WANG Jing, et al.A scene-combined navigation method based on Newton’s rings paradigm for brain-actuated intelligent wheelchairs [C]∥Proceedings of the Fifth International Brain-Computer Interface Meeting 2013.Pacific Grove, California, USA: GUTPH, 2013: 050.
[10]XIE Jun, XU Guanghua, WANG Jing, et al.Steady-state motion visual evoked potentials produced by oscillating Newton’s rings: implications for brain-computer interfaces [J].PLoS ONE, 2012, 7(6): e39707.
[11]XIE Jun, XU Guanghua, ZHANG Feng, et al.A local tangent space based approach for single-trial representation of event-related potentials [C]∥2010 5th Cairo International Biomedical Engineering Conference.Piscataway, NJ, USA: IEEE, 2010: 184-187.
[12]WANG Jing, XU Guanghua, XIE Jun, et al.EEG processing and its application in brain-computer interface [J].Engineering Sciences, 2013, 11(1): 54-61.
[13]徐光華, 張鋒, 王晶, 等.面向智能輪椅腦機導航的高頻組合編碼穩態視覺誘發電位技術研究 [J].機械工程學報, 2013, 49(6): 21-29.
XU Guanghua, ZHANG Feng, WANG Jing.Research on key technology on time series combination coding-based high-frequency SSVEP in intelligent wheelchair BCI navigation [J].Journal of Mechanical Engineering, 2013, 49(6): 21-29.
[14]張鋒, 徐光華, 謝俊, 等.穩態視覺誘發電位的研究與展望 [C]∥2010中國儀器儀表學術、產業大會: 論文集2.北京: 中國儀器儀表學會, 2010: 156-165.
[15]徐光華, 張鋒, 謝俊, 等.基于幅值調制視覺誘發電位腦-機接口方法: 中國, ZL201110259018X [P].2013 -12-04.
[16]徐光華, 張鋒, 謝俊, 等.基于HHT高頻組合編碼穩態視覺誘發電位腦機接口方法: 中國ZL2010105282 66.5 [P].2012-07-04.
[17]徐光華, 謝俊, 張鋒, 等.一種多頻率時序組合的穩態視覺誘發電位腦-機接口方法: 中國ZL2010101915 98.9 [P].2011-12-07.
[18]趙麗, 孫永, 郭旭宏.基于穩態視覺誘發電位的手機撥號系統研究 [J].中國生物醫學工程學報, 2013, 32(2): 253-256.
ZHAO Li, SUN Yong, GUO Xuhong.Research on mobile phone dialing system based on steady-state visual evoked potential [J].Chinese Journal of Biomedical Engineering, 2013, 32(2): 253-256.
(編輯 杜秀杰)
Brain-Computer Interface Paradigms and Signal Processing Strategy for Steady State Visual Evoked Potential
XU Guanghua1,2, ZHANG Feng1, XIE Jun1, LI Yeping1, HAN Chengcheng1, LI Lili1
(1.School of Mechanical Engineering, Xi’an Jiaotong University, Xi’an 710049, China; 2.State Key Laboratory for Manufacturing Systems Engineering, Xi’an Jiaotong University, Xi’an 710054, China)
Following an overview of the recent progress in steady state visual evoked potential (SSVEP) based brain-computer interfaces (BCIs), three new SSVEP paradigms for the brain-computer interface system are proposed to solve the problems in the traditional SSVEP-BCI, namely steady-state motion visual evoked potentials (SSMVEP) based BCI produced by oscillating Newton’s rings, time series combination coding-based high-frequency SSVEP (CCH-SSVEP), and amplitude modulated visual evoked potential.For identifying weak EEG signals, the enhancement method of steady-state motion visual evoked potential based on stochastic resonance mechanism is adopted.For extracting the time-frequency characteristics of high-frequency time series combination coding-based SSVEPs, the improved Hilbert-Huang transform -based variable frequency EEG feature extraction method is suggested, which facilitates increasing the recognition efficiency of SSVEP.In BCI application, the scene-combined navigational technology via the combination of SSMVEP and motion scene is introduced, where the target stimulus is associated with specific physical location, to improve navigation efficiency and user pre-select target efficiency and to plan the path from the view of “what you see is what you get” in which the movement scene combines with target stimulus to focus and improve EEG SNR for users.The strategy has been applied to intelligent wheelchair’s BCI navigation with satisfactory evaluation.
steady state visual evoked potential; brain-computer interface; Newton’s ring; modulation
2014-11-24。 作者簡介:徐光華(1964—),男,教授,博士生導師。 基金項目:國家自然科學基金資助項目(51175412)。
時間:2015-03-18
http:∥www.cnki.net/kcms/detail/61.1069.T.20150318.0940.001.html
10.7652/xjtuxb201506001
TP23
A
0253-987X(2015)06-0001-07
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06