基于STM32的電子羅盤設計
2015-12-28 13:14:03龔健穎劉忠富金健男王昊許斌
物聯網技術 2015年12期
龔健穎 劉忠富 金健男 王昊 許斌
摘 要:目前,導航系統大多采用GPS導航,但GPS導航在偏遠地帶容易受到其他波段信號的干擾,有效信號不能完全返回到衛星中,因此穩定性較差。為了解決這一問題,文中設計了一種基于STM32F103RET6單片機的電子羅盤系統,該系統中的磁阻傳感器采用HMC5883,從而有效解決了上述問題。該系統具有性能穩定、功耗低、精度高等優點,能夠在高山、森林或者一些信號較差的地方得到很好的運用。
關鍵詞:HMC5883;電子羅盤;STM32F103RET6單片機;MPU6050
中圖分類號:TP39 文獻標識碼:A 文章編號:2095-1302(2015)12-000-02
0 引 言
GPS在導航定位、測速方面具有廣泛的應用,但在高樓密集的城區和偏遠地帶,GPS信號受到阻擋, 信號精度降低,因而GPS設備不能很好的將信號回饋到衛星[1]。針對這一問題,可以采用電子羅盤和GPS組成導航定向,電子羅盤可以對GPS進行有效的補償[2]。同時,隨著科技的發展,電子羅盤也可以安裝在汽車或者輪船上,當駛入到信號較差的地方時,數字電子羅盤可以起到很大的作用。
本文以HMC5883三軸數字羅盤傳感器為基礎,以STM32F103RET6單片機為微處理器,設計了一款數字電子羅盤。它功耗低,體積小,便于攜帶,而且精度高,在GPS信號差的地方,可以起到一定的導航作用。
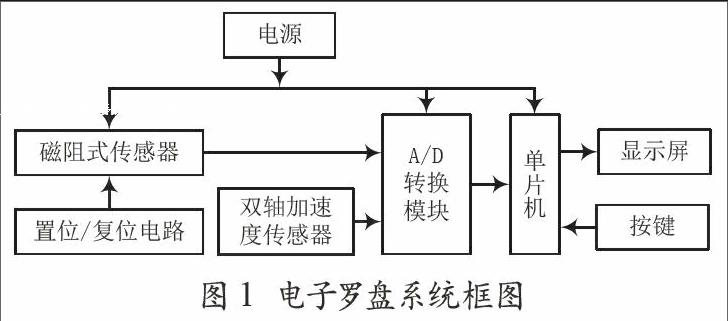
1 系統框圖
磁阻傳感器HMC5883測量地球磁場矢量信息,加速度傳感器MPU6050采集重力加速度分量,然后經過AD轉換器模擬量轉換為數字量,采用STM32F103RET6單片機來完成傳感器數據采集,并進行傳感器數據處理和誤差校正,最終得到位置信息并通過LCD顯示結果。系統框圖如圖1所示。
2 硬件電路設計
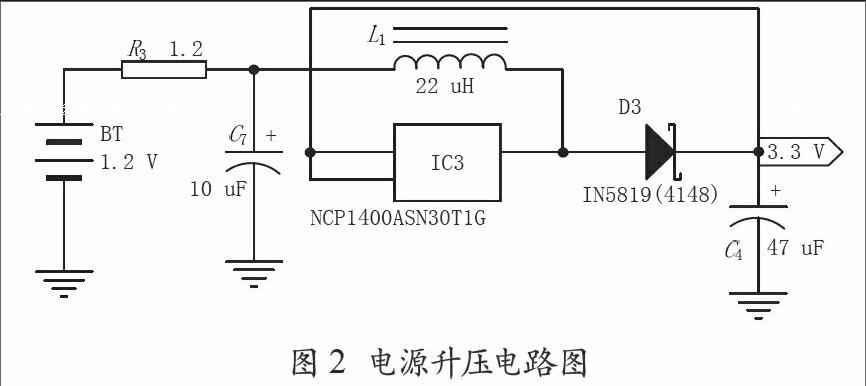
2.1 電源升壓電路
電源是電子羅盤系統正常工作的基礎,電源的好壞直接影響電路工作的穩定性,STM32F103RET6單片機的工作電壓都是3.3 V,而電子羅盤系統使用1.2 V鋰電池供電。本系統采用NCP1400ASN30T1G升壓芯片,把1.2 V電壓提升到3.3 V,供給系統各部分作為電源。電源電路如圖2所示。
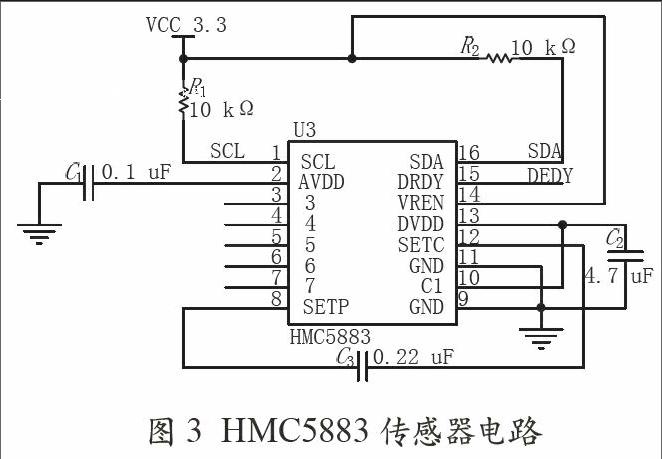
2.2 HMC5883磁阻傳感器電路設計
HMC5883磁阻傳感器接口電路如圖3所示。圖3中HMC5883為數字接口雙軸磁阻傳感器,該傳感器內置ASIC放大器,12位A/D轉換器,I2C總線輸出[3]。R1、R2為上拉電阻,DRDY為數據準備好中斷控制口,接控制器中斷輸入口。電容C1、C2加上傳感器片上ASIC電路中的H-電橋驅動電路可以產生電流脈沖,使片上的置位/復位電流帶產生磁場給傳感器去磁和極性翻轉[4]。
2.3 加速度傳感器接口電路
圖4所示的加速度傳感器采用MPU6050,該加速度傳感器采用三軸陀螺儀技術,具有體積小、重量輕、結構簡單、可靠性好等諸多優勢[5]。該加速度傳感器模塊以MPU6050為核心芯片,其對陀螺儀和加速度計使用了三個16位的ADC模數轉換,將采集到的模擬量轉化為單片機可使用的數字量[6]。模塊引出8個引腳,除了VCC和GND之外,其余6個引腳與單片機I/0口進行連接。其中,SCL為I2C時鐘引腳,SDA為I2C數據引腳。
2.4 單片機最小系統電路圖
主控電路采用STM32F103RET6單片機,其最小系統原理圖如圖5所示。圖中所示的STM32F103RET6單片機具有較強的抗干擾能力,適合本系統設計[7]。晶振為8 MHz的無源晶振經單片機倍頻后作為72 MHz的系統時鐘,單片機為低電平復位,但當復位引腳為低電平后,單片機不會馬上復位,還需要持續一段時間,故電容C13作為緩沖,從而維持一段時間的低電平[8]。BOOT0為啟動模式選擇引腳,當為低電平時為用戶閃存啟動模式,當為高電平時為系統內存啟動模式,本電路默認設置為閃存啟動模式,當需要設置為系統內存啟動模式時可通過按鍵Dow1控制。
2.5 信號調理電路和AD轉換模塊
信號調理電路由AD7705芯片控制,AD7705串行接口可配置為三線接口[9]。增益值、信號極性及更新速率的選擇可用串行輸入口由軟件來配置。該器件還包括自校準和系統校準選項,以消除器件本身或系統的增益和偏移誤差,且耗電極低[10]。
3 系統軟件設計
該系統采用模塊化編寫,便于調試,程序開始后,先讀取預置數,系統各模塊再初始化,選擇是否為測量模式,如果是,然后讀取各項數據;如果不是,則需要校準,校準時先讀取磁場數據,然后計算偏移量,判斷是否存在偏移量,如果有,則需要存入單片機中;若沒有,則直接進入系統初始化。系統具體流程如圖6所示。
4 結 語
電子羅盤系統采用數字磁阻傳感器、雙軸加速度傳感器,處理器采用STM32F103RET6單片機,具有電路結構簡單、集成度高、抗干擾能力強等優點。正常工作時耗電非常低,同時硬件成本低、功耗小,適合用于便攜導航,也可用于其他需要測量傾角和方位角的場合。
參考文獻
[1] 碗得福,馬興隆.磁性物理學[M].成都:電子科技大學出版社,1994.
[2] 陳偉韜.基于MEMS傳感器的電子羅盤系統的設計[D].廣州:廣東工業大學,2013.
[3] 胡寧博,李劍,趙櫸云.基于HMC5883的電子羅盤設計[J].傳感器世界,2011(6):35-39.
[4] 郭檢柟.基于磁阻芯片和 MSP430 單片機的電子羅盤設計[J].信息與電子工程,2010,8(1):12-15.
[5]熊劍,劉建業,孫永榮,等.數字磁羅盤的研制[J].傳感器技術,2004,23(8):46-48.
[6] 蔣海濤,郭站營.基于 MEMS 加速度傳感器的飛行器傾角測量系統設計[J] .計算機測量與控制,2010,18(1):107-109.
[7] 邰莉.三維磁阻式電子羅盤的設計與實現[D].哈爾濱:哈爾濱工程大學,2009.
[8] 彭軍.傳感器與檢測技術[M].西安:西安電子科技大學出版社,2003.
[9] 劉武發,蔣蓁,龔振邦.基于磁阻和MEMS加速度傳感器的電子羅盤設計及應用[J].兵工學報,2008,29(2):244-248.
[10] 劉宇,陳簫,李錦明,等.基于GPS/電子羅盤的測姿定位系統[J].計算機測量與控制,2011,19(10):2370-2372.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45