一種聯合多歷元觀測信息的GPS/BDS組合單點定位方法
2016-01-04 08:02:43潘林,蔡昌盛,戴吾蛟等
測繪通報 2015年2期
引文格式: 潘林,蔡昌盛,戴吾蛟,等. 一種聯合多歷元觀測信息的GPS/BDS組合單點定位方法[J].測繪通報,2015(2):5-9.DOI:10.13474/j.cnki.11-2246.2015.0030
一種聯合多歷元觀測信息的GPS/BDS組合單點定位方法
潘林,蔡昌盛,戴吾蛟,朱建軍
(中南大學地球科學與信息物理學院,湖南 長沙 410083)
An Approach Using Multi-epoch Observations of Combined GPS/BeiDou
Single Point Positioning
PAN Lin,CAI Changsheng,DAI Wujiao,ZHU Jianjun
摘要:在GPS/BDS組合單點定位中,定位精度受觀測信息量影響很大,但觀測時段中不可避免地會有個別歷元觀測信息過少,導致這些歷元的定位精度很差。基于此,本文提出了一種聯合多歷元觀測信息的GPS/BDS組合單點定位方法,以彌補單歷元方法中單個歷元觀測信息量不足的缺點。利用開闊環境和遮擋環境下的觀測數據進行分析,結果表明,在GPS單系統、北斗單系統及GPS/BDS組合系統單點定位中,多歷元方法的定位精度均優于單歷元方法。
關鍵詞:GPS;北斗;單點定位;定位精度;多歷元
中圖分類號:P228.4文獻標識碼:B
收稿日期:2013-11-14
基金項目:國家自然科學基金(41004011);湖南省國土資源廳科技項目(2012-41)
作者簡介:潘林(1989—),男,碩士生,主要研究方向為北斗數據處理和精密單點定位。E-mail:panlin_1989@163.com
一、引言
北斗區域衛星導航系統(BeiDou navigation satellite system,BDS)于2012年12月27日開始組網運行,面向我國及周邊地區提供定位精度10m、測速精度0.2m/s、授時精度10ns的開放服務。BDS由14顆衛星構成,包括5顆地球靜止軌道(GEO)衛星、5顆傾斜地球同步軌道(IGSO)衛星和4顆中圓地球軌道(MEO)衛星。預計到2020年左右,建成覆蓋全球的導航系統,完整星座由5顆GEO衛星、3顆IGSO衛星和27顆MEO衛星組成(http:∥www.beidou.gov.cn/)。
相比單系統,雙系統、多系統組合具有明顯的優勢,可以大大增加可視衛星數,改善衛星幾何結構,提高定位的精度、可靠性和效率[1]。在未來多GNSS系統共存的格局下,進行雙系統、多系統組合已成為衛星導航和定位應用發展的一個必然趨勢。
在GPS/BDS組合單點定位中,定位精度受觀測信息量影響很大,但觀測時段中不可避免地會有個別歷元觀測信息過少,導致這些歷元的定位精度很差。基于此,本文提出了一種聯合多歷元觀測信息的GPS/BDS組合單點定位方法,以彌補單歷元方法中單個歷元觀測信息量不足的缺點。筆者利用開闊環境和遮擋環境下的觀測數據,對多歷元方法的可行性進行了分析,并與單歷元方法的結果進行了對比。
二 、GPS/BDS組合單點定位方法
1. GPS/BDS組合單點定位觀測模型
對于GPS/BDS單頻偽距組合單點定位,其基本觀測方程表示如下[2]
(1)
(2)
式中,g和b分別表示一顆GPS衛星和一顆北斗衛星;P是衛星第一個頻率上的偽距觀測值,單位m;ρ是衛星與接收機之間的幾何距離,單位m;c是光速,m/s;dt是接收機鐘差,單位s;dtsys是GPS-BDS時間差,單位s;dT是衛星鐘差,單位s;dorb是衛星軌道誤差,單位m;dtrop是對流層延遲誤差,單位m;dion是電離層延遲誤差,單位m;ε包含觀測噪聲與多路徑誤差,單位m。
在式(1)、式(2)中,對流層延遲誤差通過Saastamoinen模型[3]改正,電離層延遲誤差通過Klobuchar模型[4]改正,衛星位置和衛星鐘差通過廣播星歷計算得到。北斗的坐標系統為2000國家大地坐標系統(CGCS2000),GPS的坐標系統為WGS-84,但兩個坐標系統相差僅在厘米級,而單頻偽距單點定位的精度在米級,故在解算過程中無須進行坐標轉換[5]。北斗的時間系統為北斗時,GPS的時間系統為GPS時,兩時間系統除了有一個14s的偏差外[5],還有一個小于1s且隨時間變化的偏差,因此需要估計一個額外的GPS-BDS時間差參數。忽略軌道誤差及殘留的衛星鐘差后,待估參數包括三維位置坐標、接收機鐘差及GPS-BDS時間差。
2. 多歷元單點定位方法
在單點定位中,定位精度受觀測信息量影響很大,但觀測時段中不可避免地會有個別歷元觀測信息過少,導致這些歷元的定位精度很差。基于此,考慮聯合多個歷元的觀測信息進行定位,以彌補單歷元方法中單個歷元觀測信息量不足的缺點,這就是多歷元單點定位方法的主要思想。
由于本文只是驗證,以及和單歷元方法相比,多歷元方法是否能夠有效改善定位精度,因此只處理了靜態觀測數據。在靜態觀測中,接收機的位置是不變的,但由于接收機鐘漂的存在,每個歷元的接收機鐘差和GPS-BDS時間差參數是不同的,因此與單歷元方法相比,多歷元方法中每增加一個歷元的觀測信息,待估參數就增加一個接收機鐘差參數和一個GPS-BDS時間差參數。如果多歷元方法中歷元的個數為m,則單系統定位的參數個數為3+m,包括3個位置坐標參數和m個接收機鐘差參數;雙系統定位的參數個數為3+2m,相比單系統增加了m個GPS-BDS時間差參數。需要說明的是,本文使用的是多歷元遞推的方法,如果多歷元方法中歷元的個數為m,則從第m個歷元開始解算,第m個歷元利用1到m歷元的觀測信息,第m+1個歷元利用2到m+1歷元的觀測信息,依此類推直至最后一個歷元。
3. GPS/BDS組合單點定位定權方法
在GPS/BDS組合單點定位中,涉及兩個不同衛星系統的觀測值,因此需要確定這兩個衛星系統觀測值的合理權比。目前,主要有兩種方法來獲得這一權比:一種是先驗定權,即得到兩衛星系統觀測值的先驗方差[2];另一種是驗后定權,如Helmert方差分量估計[6]。
先驗定權方法可以粗略地獲得GPS與北斗這兩個衛星系統觀測值的合理權比,但需要得到兩衛星系統觀測值的先驗方差。但由于受到多種誤差的綜合影響,先驗方差通常不能準確獲得。在具體實施的過程中,通常是選擇較長時間的觀測數據進行測試,不斷調整兩衛星系統觀測值的先驗方差,即兩衛星系統觀測值的權比[2],獲得最優定位精度的權比即為兩衛星系統觀測值的合理權比。
Helmert驗后方差分量估計是一種典型的驗后定權方法。它的基本思想是首先根據驗前估計權進行預平差,用平差后得到的殘差信息來估計觀測值的方差,根據方差的估計值重新進行定權,以改善初始權值,然后根據重新確定的權值再次進行平差,如此重復進行,直至不同類觀測值的權趨于合理,詳細處理過程見文獻[6]。
三、觀測環境與數據采集
為了測試多歷元單點定位方法的可行性,特采集了開闊環境和遮擋環境下的觀測數據進行分析。開闊環境觀測點位于中南大學附近的一棟居民樓樓頂,如圖1(a)所示。遮擋環境觀測點位于中南大學采礦樓前的一片樹林區域中,如圖1(b)所示。在開闊環境觀測中,衛星信號沒有任何遮擋。在遮擋環境觀測中,部分衛星信號會被樹葉遮擋。

圖1 GPS/BDS野外數據采集
采集數據的接收機是由南方測繪公司生產,接收機型號是SOUTH S82-C。該接收機可以輸出采樣率為1Hz的GPS L1/L2雙頻數據和北斗B1/B2雙頻數據。采集數據時截止高度角設為10°,采樣間隔設為30s。開闊環境數據在2013年4月10日采集,觀測時間段為00:00—23:15(GPS時)。遮擋環境數據在2013年3月25日采集,觀測時間段為04:30—09:30。由于導航用戶大多使用單頻接收機,因此只利用L1/B1上的偽距觀測值進行分析。
四、結果與分析
本文選擇4種方案用于GPS/北斗組合單點定位:第1種是采用先驗定權的單歷元定位方法;第2種是采用先驗定權的多歷元定位方法;第3種是采用驗后定權即Helmert方差分量估計的單歷元定位方法;第4種是采用驗后定權的多歷元定位方法。
利用測站所測GPS數據進行精密單點定位[7]獲得的位置解作為參考坐標,從而對各方案的定位精度進行評估。
在使用方案1和方案2之前,必須首先通過先驗定權方法獲得GPS與BeiDou這兩個衛星系統觀測值的合理權比。選取開闊環境數據進行單歷元單點定位分析。圖2所示是GPS/BDS組合單點定位取不同權比時三維定位誤差的RMS統計值。從圖2中可知,當權比為1∶1,即GPS與BeiDou的先驗方差相等時,定位精度最高。因此在方案1和方案2中,取兩衛星系統觀測值的權比為1∶1。
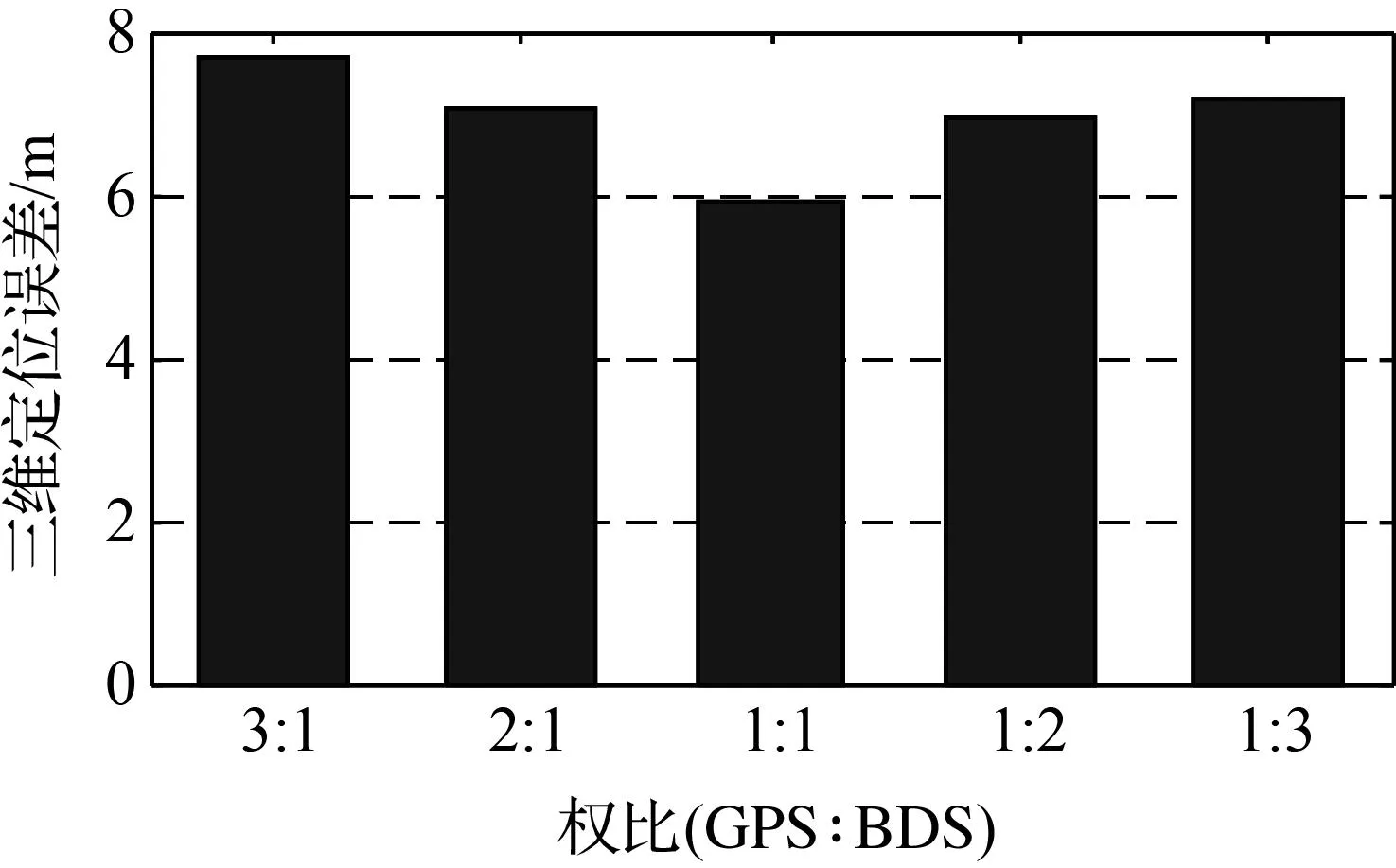
圖2 GPS/BDS組合單點定位取不同權比時三維定位誤差的RMS統計值
在使用方案2和方案4之前,必須首先確定多歷元單點定位方法中取多少個歷元的觀測信息才是最合理的。表1所示是開闊環境數據采用多歷元單點定位方法取不同歷元個數時三維定位誤差的RMS統計值。從表1中可知,隨著歷元個數的增多,定位精度不斷提高,但歷元個數從2變到3時,定位精度改善并不明顯,為兼顧算法的計算效率,在方案2和方案4中,多歷元單點定位方法的歷元個數取2。
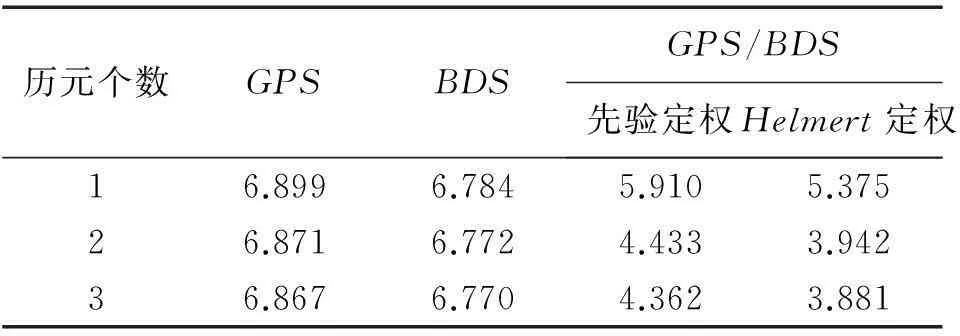
表1 多歷元單點定位方法取不同歷元個數時三維定位誤差的 RMS統計值 m
為了進一步驗證所取權比的合理性,特求取了GPS/BDS組合單點定位取不同權比時GPS與BDS衛星偽距觀測值的殘差。表2所示是GPS與BDS衛星偽距觀測值殘差的RMS統計值。從表2可知,當權比為1∶1時,GPS與BDS衛星偽距觀測值殘差最小,因此方案1和方案2中取兩衛星系統觀測值的權比為1∶1是合理的。從表2中還可知,除權比為3∶1之外,BDS衛星的殘差值均小于GPS。圖3所示是GPS/BDS組合單點定位取權比為1∶1時各GPS與BDS衛星偽距觀測值的殘差值。從圖3可知,兩衛星系統絕大部分歷元的殘差值在5m以內,并且BDS衛星的殘差值較GPS更加穩定,造成這種現象的原因是大部分時間BDS衛星的高度角均較高[4]。
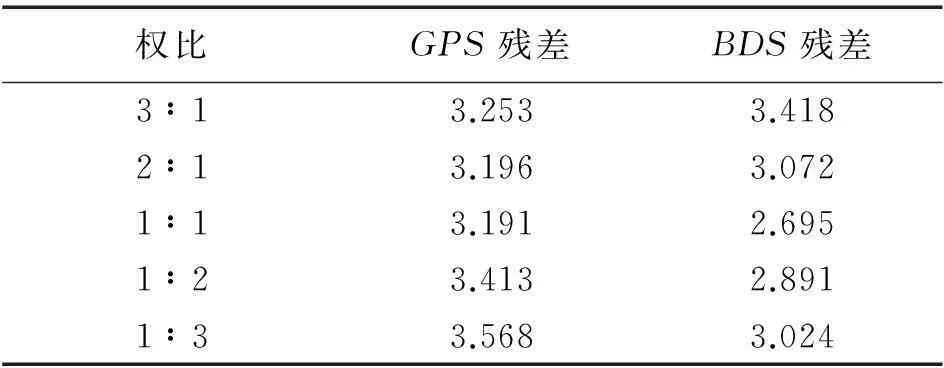
表2 GPS/ BDS組合單點定位取不同權比時 GPS與 BDS衛星偽距觀測值殘差的 RMS統計值 m
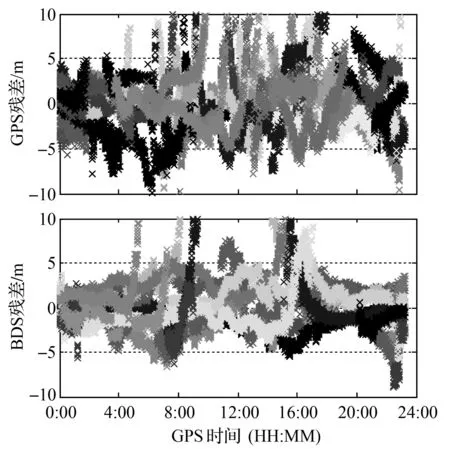
圖3 各GPS衛星與北斗衛星偽距觀測值殘差
為了比較方案1、2和方案3、4所得到的兩衛星系統觀測值的權比是否一致,使用Helmert方差分量估計方法定權,分別采用單歷元方法和多歷元方法處理開闊環境數據,求取兩衛星系統觀測值的收斂權比,結果如圖4所示。據統計,單歷元方法中,Helmert方差分量估計方法所得權比為0.53~1.98,均值為1.02,STD(standarddeviation)值為0.25;多歷元方法中,權比為0.70~1.65,均值為1.00,STD值為0.16。因此,Helmert方差分量估計方法所得權比與先驗定權方法是一致的。并且,與單歷元方法相比,多歷元方法所得權比更加穩定和可靠。

圖4 Helmert方差分量估計方法收斂權比
圖5是利用開闊環境數據,使用4種方案進行GPS/BDS組合單點定位的結果。圖6是相應的可見衛星數與PDOP值。從圖5中可知,4種方案在東方向的定位誤差相差不大;方案4北方向的定位誤差要明顯小于其他3種方案;而在高程方向,有諸多時間段,如12:00和16:00附近時間段,多歷元方法的定位精度要明顯優于單歷元方法。從圖6中可知,和單歷元方法相比,多歷元方法的可見衛星數增加了一倍,PDOP值顯著減小,這是多歷元方法定位精度得到改善的直接原因。
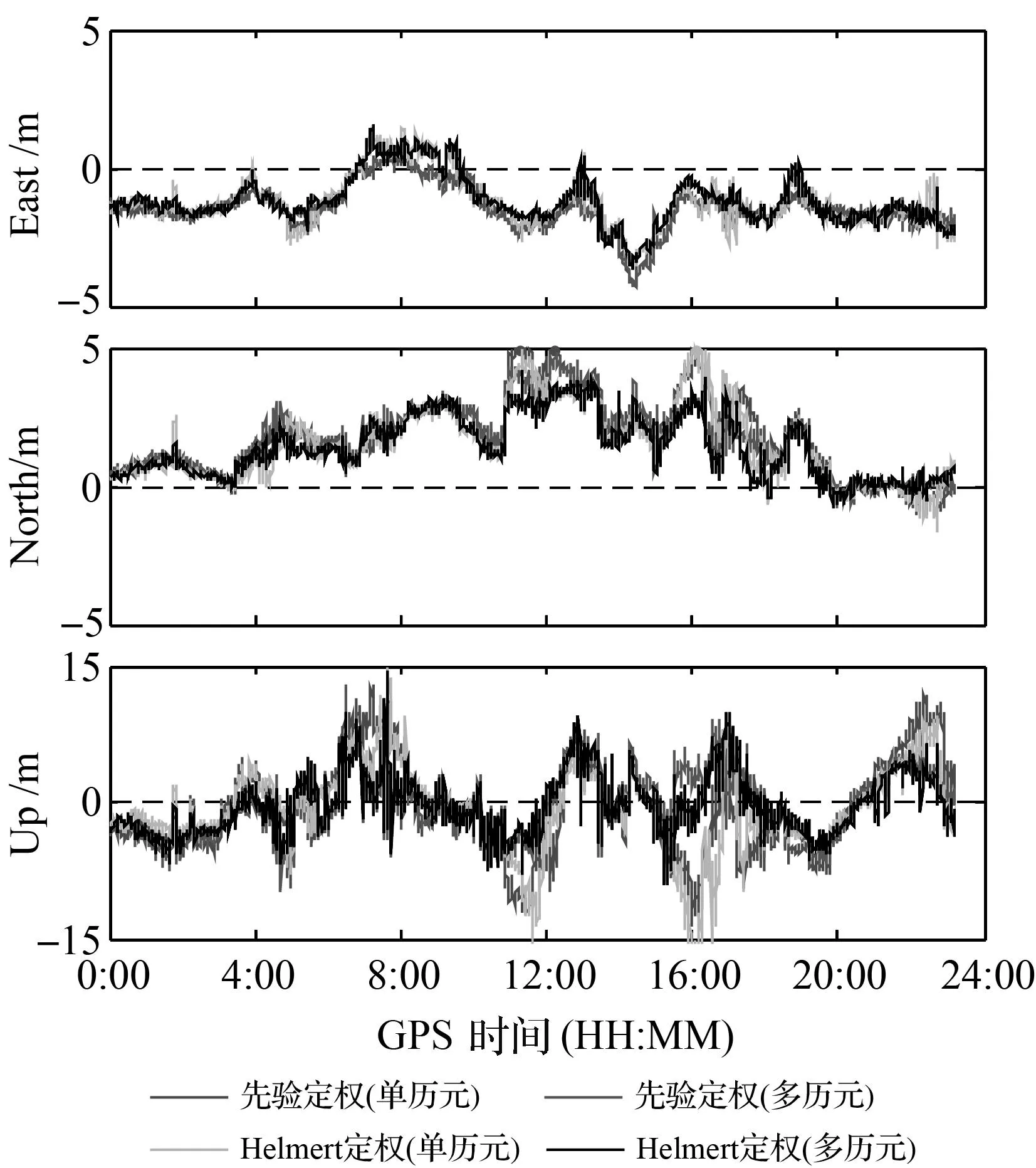
圖5 開闊環境數據GPS/BDS組合單點定位結果
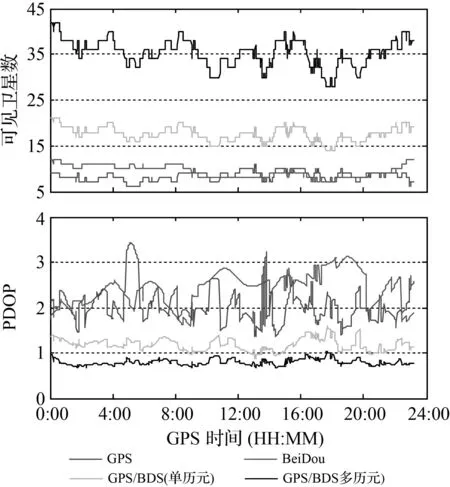
圖6 開闊環境數據可見衛星數與PDOP值
為了分析可見條件不好情況下的定位情況,特對遮擋環境數據進行分析。圖7是利用遮擋環境數據,使用4種方案進行GPS/BDS組合單點定位的結果。圖8是相應的可見衛星數與PDOP值。由圖8和圖6比較可知,與開闊環境相比,在遮擋環境中,可見衛星數減少,PDOP值增大。由于沒有足夠多的多余觀測,圖7中方案3的定位結果最差,出現了嚴重的發散情況,而方案4中采用多歷元方法,則很好地避免了這種情況的發生。因此,在遮擋環境中沒有足夠多的多余觀測時,不建議使用方案3進行GPS/BDS組合單點定位。
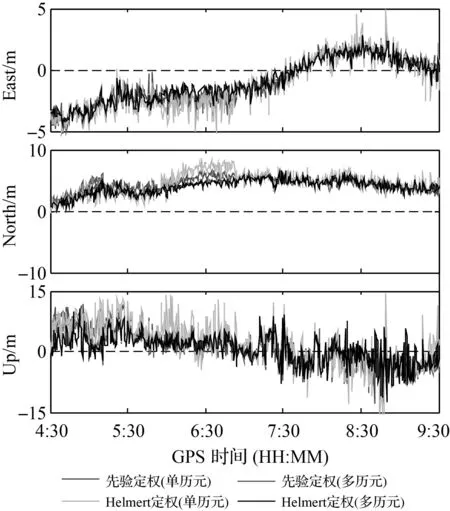
圖7 遮擋環境數據GPS/BDS組合單點定位結果
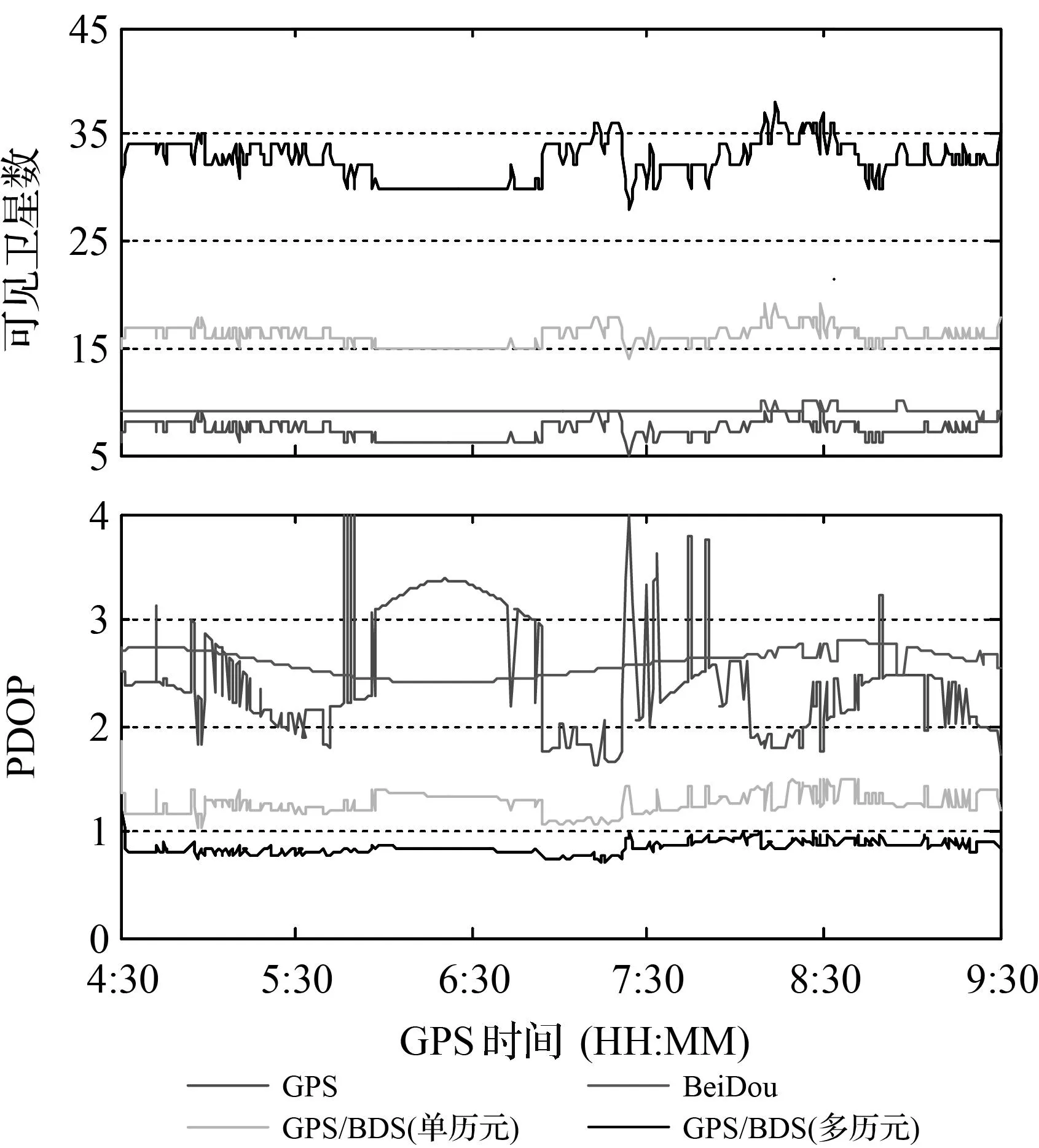
圖8 遮擋環境數據可見衛星數與PDOP值
表3、表4是GPS單系統、BDS單系統、GPS/BDS組合系統單點定位誤差RMS統計值。從表中可知,BDS單點定位的精度達到甚至超過GPS單點定位的水平;雙系統組合單點定位的精度要明顯優于單系統。對于單系統單點定位,在開闊環境下,與單歷元方法相比,多歷元方法的定位精度只有輕微改善;在遮擋環境下,與單歷元方法相比,多歷元方法的定位精度有顯著提高。對于GPS/BDS組合單點定位,無論是開闊環境還是遮擋環境,與單歷元方法相比,多歷元方法的定位精度均有顯著改善,并且精度改善主要體現在高程方向。從表4中可知,在所有的觀測時段中,方案4的定位精度最高。
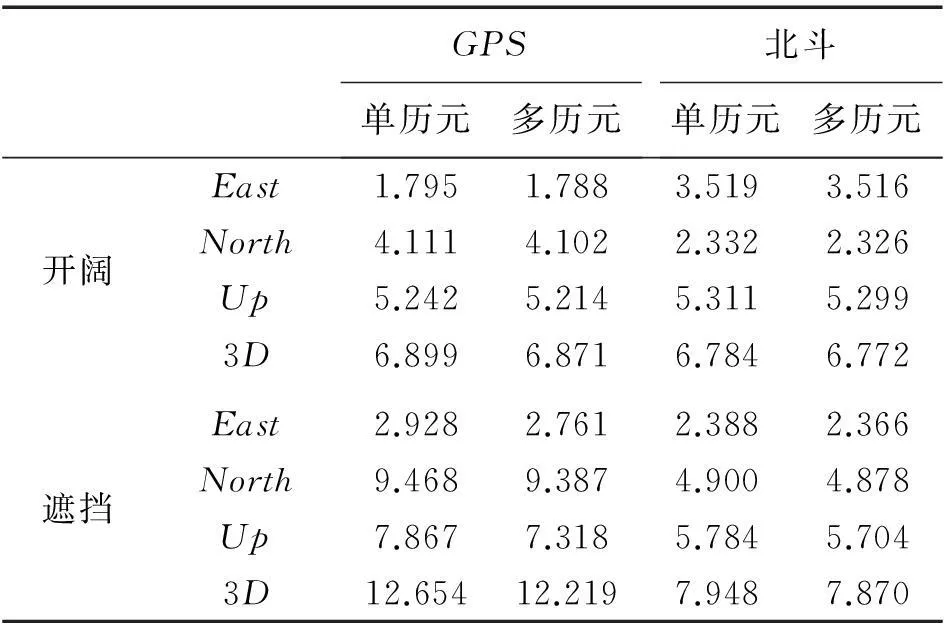
表3 GPS單系統、 BDS單系統單點定位誤差 RMS統計值 m
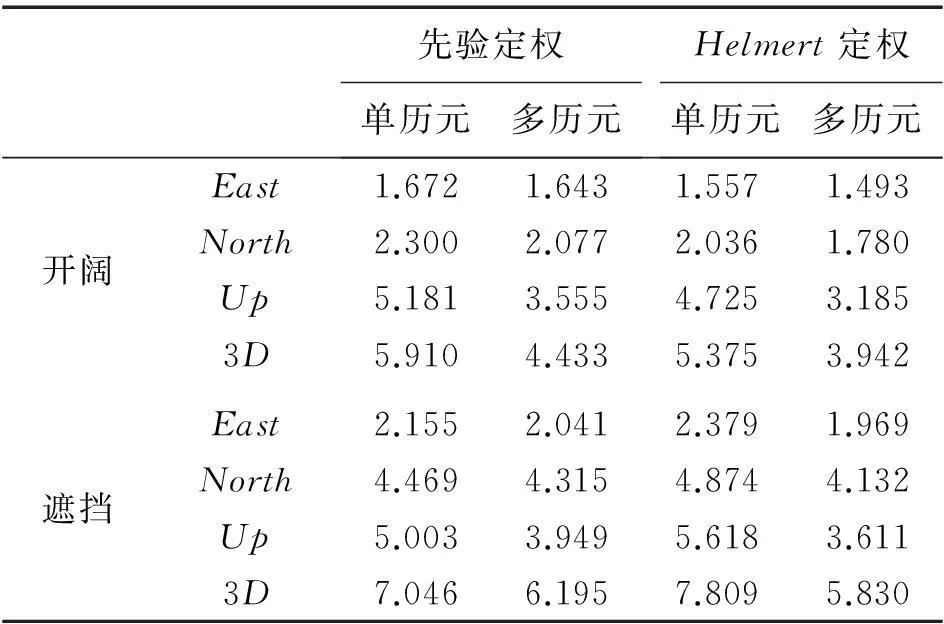
表4 GPS/ BDS組合系統單點定位誤差 RMS統計值 m
五、結束語
在GPS/BDS組合單點定位中,定位精度受觀測信息量影響很大,尤其是使用Helmert方差分量估計方法定權時,如果沒有足夠多的多余觀測,會出現嚴重的發散現象。但觀測時段中不可避免地會有個別歷元觀測信息過少,導致這些歷元的定位精度很差。基于此,本文提出了一種聯合多歷元觀測信息的GPS/BDS組合單點定位方法,以彌補單歷元方法中單個歷元觀測信息量不足的缺點。利用開闊環境和遮擋環境下的觀測數據進行分析,結果表明,在GPS單系統、BDS單系統及GPS/BDS組合系統單點定位中,和單歷元方法相比,多歷元方法的定位精度均有不同程度的改善。
本文證明了多歷元方法在單點定位中的可行性,但只處理了靜態觀測數據。在動態觀測中,由于接收機位置是不斷變動的,如果使用多歷元方法,單點定位的函數模型需要進一步研究。本文為下一步的研究工作打下了基礎,具有重要的指導意義。
參考文獻:
[1]CAIC,GAOY.ACombinedGPS/GLONASSNavigationAlgorithmforUsewithLimitedSatelliteVisibility[J].JournalofNavigation, 2009, 62(4): 671-685.
[2]CAIC,GAOY,PANL.AnAnalysisonCombinedGPS/COMPASSDataQualityandItsEffectonSiglePointPositioningAccuracyunderDifferentObservingCondtions[J].AdvancesinSpaceResearch, 2013,DOI: 10.1016/j.asr.2013.02. 019.
[3]SAASTAMOINENJ.ContributiontotheTheoryofAtmosphericRefraction[J].BulletinGéodésique, 1972, 105(1):279-298.
[4]KLOBUCHARJ.IonosphericTime-DelayAlgorithmsforSingle-FrequencyGPSUsers[J].IEEETransactionsonAerospaceandElectronicSystems, 1987,AES-23(3): 325-331.
[5]SHIC,ZHAOQ,HUZ,etal.PreciseRelativePositioningUsingRealTrackingDatafromCOMPASSGEOandIGSOSatellites[J].GPSSolutions, 2012,17(1):103-119.
[6]HELMERTFR.DieAusgleichungsrechnungNachderMethodederKleinstenQuadrate[M].ZweiteAuflage:Teubner,1907.
[7]ZUMBERGEJF,HEFLINMB,JEFFERSONDC,etal.PrecisePointPositioningfortheEfficientandRobustAnalysisofGPSDatafromLargeNetworks[J].JournalofGeophysicalResearch, 1997, 102(B3):5005-5017,DOI: 10.1029/96JB03860.