艦載共架垂直發(fā)射導(dǎo)彈發(fā)射時(shí)間協(xié)調(diào)
2016-01-06 03:46:14賈正榮,盧發(fā)興,吳玲
彈道學(xué)報(bào) 2015年1期
艦載共架垂直發(fā)射導(dǎo)彈發(fā)射時(shí)間協(xié)調(diào)
賈正榮,盧發(fā)興,吳玲
(海軍工程大學(xué) 電子工程學(xué)院,武漢 430033)
摘要:為了避免發(fā)射和飛行中2枚導(dǎo)彈的相互干擾,研究了共架垂直發(fā)射導(dǎo)彈的發(fā)射時(shí)間協(xié)調(diào),基于垂直發(fā)射導(dǎo)彈發(fā)射初始段的運(yùn)動(dòng)特性,考慮垂直上升段和程序轉(zhuǎn)彎段的彈道散布誤差,建立了彈道散布體時(shí)域模型;引入距離裕度的概念,對(duì)不同發(fā)射時(shí)刻下2枚導(dǎo)彈的預(yù)定彈道管道進(jìn)行沖突檢測(cè),并根據(jù)距離裕度確定導(dǎo)彈發(fā)射間隔時(shí)間。仿真結(jié)果表明,得到的沖突檢測(cè)與消解的時(shí)間在100 ms級(jí),滿足實(shí)戰(zhàn)要求。
關(guān)鍵詞:艦空導(dǎo)彈;垂直發(fā)射;發(fā)射時(shí)間;沖突檢測(cè);沖突消解
收稿日期:2014-06-11
作者簡(jiǎn)介:賈正榮(1992-),男,碩士研究生,研究方向?yàn)榕炤d武器控制系統(tǒng)。E-mail:jzr451763650@sina.cn。
中圖分類(lèi)號(hào):TJ761文獻(xiàn)標(biāo)識(shí)碼:A
LaunchTimeCoordinationforShip-borneCommon-frame
VerticalLaunchMissile
JIAZheng-rong,LUFa-xing,WULing
(CollegeofElectronicEngineering,NavalUniversityofEngineering,Wuhan430033,China)
Abstract:To avoid the interference of two missiles at the launch and flight processes,the launch-time coordination for ship-borne common-frame vertical-launch missiles was analyzed.Based on the initial motion feature of the vertical-launch missile,the time-variable trajectory distribution model was established in view of the trajectory dispersion-errors during vertical ascent phase and procedure turn phase.By introducing the distance-margin,the potential conflict of two missiles’ trajectory pipes of different launch time was detected,and the launch interval was obtained.The simulation result shows that time-consuming of the whole process is confined within 100 milliseconds,and it can meet the requirements of combat.
Keywords:ship-to-airmissile;verticallaunching;launchtime;conflictdetection;conflictresolution
共架垂直發(fā)射是艦載導(dǎo)彈的一種重要發(fā)射方式。發(fā)射協(xié)調(diào)是共架武器發(fā)射控制的重要環(huán)節(jié),它是在通用發(fā)控單元同時(shí)收到多個(gè)導(dǎo)彈發(fā)射命令時(shí),為避免發(fā)射和飛行中兩彈的相互干擾,而協(xié)調(diào)導(dǎo)彈的發(fā)射彈位、空域、發(fā)射時(shí)間的過(guò)程。其中發(fā)射時(shí)間協(xié)調(diào)可以在發(fā)射彈位和空域協(xié)調(diào)的基礎(chǔ)上,進(jìn)一步消除發(fā)射裝置振動(dòng)、燃?xì)馀艑?dǎo)、初始彈道交叉等的影響,因而是協(xié)調(diào)的關(guān)鍵。時(shí)間協(xié)調(diào)需要解算兩彈的預(yù)定彈道交叉點(diǎn)和前一枚彈飛過(guò)彈道交叉點(diǎn)的時(shí)間,來(lái)確定后一枚彈的發(fā)射時(shí)間。相關(guān)文獻(xiàn)中針對(duì)火力交叉判斷的研究較多[2-4],但不涉及發(fā)射延遲時(shí)間的計(jì)算,而且大多是通過(guò)計(jì)算2條彈道的靜態(tài)距離來(lái)判斷交叉,其結(jié)果與不同發(fā)射時(shí)刻下的動(dòng)態(tài)飛行情況不符,容易造成誤判;此外,考慮誤差影響時(shí)彈道呈管道形式,難以求交叉點(diǎn),需要在合理表示沖突區(qū)域的基礎(chǔ)上進(jìn)行發(fā)射時(shí)間協(xié)調(diào)。
本文在建立導(dǎo)彈發(fā)射初始段運(yùn)動(dòng)模型和彈道散布體時(shí)域模型的基礎(chǔ)上,引入距離裕度的概念,為不同發(fā)射時(shí)刻下2枚導(dǎo)彈的預(yù)定彈道管道進(jìn)行沖突判斷,確定沖突時(shí)刻,從而在距離裕度為正的原則下確定導(dǎo)彈發(fā)射間隔時(shí)間,實(shí)現(xiàn)共架垂直發(fā)射的時(shí)間協(xié)調(diào)。
1垂直發(fā)射導(dǎo)彈初始段運(yùn)動(dòng)模型
艦載垂直發(fā)射導(dǎo)彈的外彈道按照運(yùn)動(dòng)階段可以分為垂直上升段、程序轉(zhuǎn)彎段與制導(dǎo)飛行段,如圖1所示。共架發(fā)射導(dǎo)彈的時(shí)間協(xié)調(diào)僅涉及導(dǎo)彈的初始段,即垂直上升段與程序轉(zhuǎn)彎段。
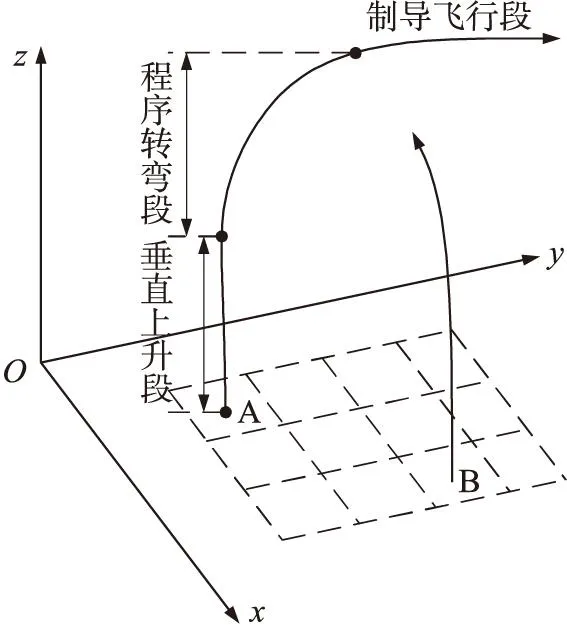
圖1 單個(gè)艦艇平臺(tái)多枚垂直發(fā)射導(dǎo)彈彈道示意圖
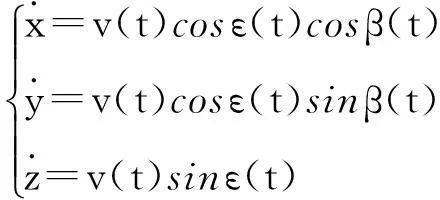
考慮冷發(fā)射方式建立垂直發(fā)射導(dǎo)彈垂直上升段和程序轉(zhuǎn)彎段的運(yùn)動(dòng)模型。為了降低模型復(fù)雜度且不影響問(wèn)題的本質(zhì),將導(dǎo)彈視為質(zhì)點(diǎn)。冷發(fā)射方式下導(dǎo)彈首先通過(guò)壓縮氣體或機(jī)械裝置獲得初速,在空中無(wú)動(dòng)力飛行一段時(shí)間(t0≤t≤t1a)。這時(shí)導(dǎo)彈僅受空氣動(dòng)力以及重力的作用,在慣性直角坐標(biāo)系中,其運(yùn)動(dòng)方程可以表示為
(1)
在無(wú)動(dòng)力飛行段,可以認(rèn)為作用在導(dǎo)彈彈體上的力矩為0,這樣,導(dǎo)彈俯仰角ε和偏航角β均為定值,其運(yùn)動(dòng)僅與發(fā)射時(shí)的初速度、初始俯仰角及初始偏航角有關(guān)。
無(wú)動(dòng)力飛行段之后導(dǎo)彈進(jìn)入助推器工作段(t1a≤t≤t1),為簡(jiǎn)化分析,可以從助推器提供的加速度而不是提供的動(dòng)力方面考慮,此外,認(rèn)為導(dǎo)彈質(zhì)心位置固定,此時(shí)得到助推器工作段導(dǎo)彈的運(yùn)動(dòng)模型:
(2)
式中:ap為導(dǎo)彈助推器提供的加速度,g為重力加速度。
經(jīng)過(guò)垂直上升段的加速過(guò)程,導(dǎo)彈進(jìn)入程序轉(zhuǎn)彎段(t1≤t≤t2),導(dǎo)彈調(diào)整自身姿態(tài)以對(duì)正目標(biāo)提前點(diǎn),此階段受力過(guò)程復(fù)雜,本文僅給出運(yùn)動(dòng)方程:
(3)
式(3)中導(dǎo)彈速度、俯仰角以及偏航角是變化函數(shù),導(dǎo)彈對(duì)這3個(gè)變量要進(jìn)行控制。對(duì)于俯仰通道的控制,其時(shí)域形式可表示為
(4)
式中:ε0為俯仰角初值,εe為轉(zhuǎn)彎終點(diǎn)俯仰角即控制目標(biāo),τs為時(shí)間系數(shù)(調(diào)節(jié)時(shí)間);Ks為控制系數(shù)。偏航通道與速度通道的控制類(lèi)似式(4)給出。
2垂直發(fā)射導(dǎo)彈彈道散布
導(dǎo)彈在發(fā)射后的實(shí)際運(yùn)動(dòng)過(guò)程中可能受到各種外界干擾,同時(shí),導(dǎo)彈運(yùn)動(dòng)參數(shù)與理論值也會(huì)存在一定的偏差,這些因素共同作用使得導(dǎo)彈的實(shí)際彈道呈現(xiàn)一定的散布。為了與導(dǎo)彈運(yùn)動(dòng)模型相結(jié)合,可以認(rèn)為導(dǎo)彈的運(yùn)動(dòng)參數(shù)存在誤差,造成彈道散布的誤差在導(dǎo)彈運(yùn)動(dòng)的各個(gè)階段有所不同,如圖2所示。
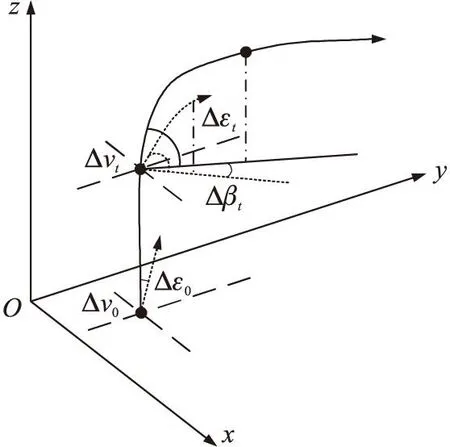
圖2 垂直發(fā)射導(dǎo)彈初始段運(yùn)動(dòng)參數(shù)誤差示意圖
2.1 垂直上升段誤差
冷發(fā)射的垂直上升段,彈射裝置提供給導(dǎo)彈的初速度會(huì)存在一定的誤差,稱為發(fā)射初速度誤差Δv0,該誤差產(chǎn)生的原因與機(jī)械裝置有關(guān),可以認(rèn)為其服從正態(tài)分布,并且會(huì)對(duì)導(dǎo)彈的彈道造成一定的影響。
另外,艦艇在海面上運(yùn)動(dòng),其甲板面會(huì)與水平面存在一定的傾角,而彈倉(cāng)又是固連在艦艇上的,所以導(dǎo)彈發(fā)射時(shí)的姿態(tài)角也會(huì)存在一定的誤差,即發(fā)射角度誤差Δε0,該誤差是實(shí)際的發(fā)射姿態(tài)角與理論發(fā)射姿態(tài)角的偏差。
Δv0和Δε02個(gè)誤差均出現(xiàn)在導(dǎo)彈彈射出倉(cāng)的時(shí)刻,是導(dǎo)彈運(yùn)動(dòng)初始狀態(tài)的誤差,不改變導(dǎo)彈的運(yùn)動(dòng)模型,并且在無(wú)動(dòng)力飛行段,導(dǎo)彈不修正自身的姿態(tài),所以Δv0和Δε0在無(wú)動(dòng)力飛行段是不變的。在助推器工作段,導(dǎo)彈會(huì)通過(guò)傳感器測(cè)量自身的姿態(tài)并予以修正,此時(shí),誤差會(huì)按照一定的規(guī)律衰減,設(shè)誤差為δ,其衰減規(guī)律可以用負(fù)指數(shù)函數(shù)描述:
(5)
式中:δ0為誤差初值,Kd為衰減系數(shù),τd為衰減時(shí)間。
2.2 程序轉(zhuǎn)彎段誤差
程序轉(zhuǎn)彎段是導(dǎo)彈進(jìn)行姿態(tài)調(diào)整的階段,由于動(dòng)力過(guò)程復(fù)雜,可以通過(guò)運(yùn)動(dòng)參數(shù)的誤差來(lái)估計(jì)其彈道散布。根據(jù)式(3)描述的導(dǎo)彈程序轉(zhuǎn)彎段運(yùn)動(dòng)方程,此階段共有速度、俯仰角與偏航角3個(gè)運(yùn)動(dòng)參數(shù)。首先,導(dǎo)彈在進(jìn)入程序轉(zhuǎn)彎段時(shí),其運(yùn)動(dòng)狀態(tài)與理論值會(huì)存在一定的偏差;其次,在進(jìn)行姿態(tài)調(diào)整的過(guò)程中,由于控制系統(tǒng)并不是理想的,控制過(guò)程也會(huì)存在一定的誤差。綜合來(lái)看,可以認(rèn)為是導(dǎo)彈在進(jìn)入程序轉(zhuǎn)彎段時(shí)的運(yùn)動(dòng)狀態(tài)存在誤差,導(dǎo)致整個(gè)程序轉(zhuǎn)彎段產(chǎn)生彈道散布。
綜上所述,程序轉(zhuǎn)彎段中的運(yùn)動(dòng)參數(shù)誤差包括轉(zhuǎn)彎初速度誤差Δvt,俯仰轉(zhuǎn)向誤差Δεt與偏航轉(zhuǎn)向誤差Δβt。類(lèi)似地,程序轉(zhuǎn)彎段中的運(yùn)動(dòng)參數(shù)誤差也會(huì)依照式(5)衰減。
值得注意的是,上述誤差均為系統(tǒng)誤差,導(dǎo)彈在運(yùn)動(dòng)中還會(huì)受到各種隨機(jī)擾動(dòng)的影響,這些擾動(dòng)呈現(xiàn)一定的統(tǒng)計(jì)特性,在計(jì)算中可以通過(guò)增大彈道散布的方法來(lái)覆蓋這些擾動(dòng)。
2.3 彈道散布體模型
由于導(dǎo)彈的運(yùn)動(dòng)模型較為復(fù)雜,其每一時(shí)刻的彈道散布難以得到解析的形式,此時(shí)可建立散布體模型以包絡(luò)實(shí)際的彈道散布。本文建立散布球體模型。
設(shè)t時(shí)刻導(dǎo)彈可能出現(xiàn)的位置為pi(x,y,z,t),p0(x,y,z,t)為理論彈道此時(shí)的位置,定義di(t)表示t時(shí)刻導(dǎo)彈實(shí)際位置與理論位置的偏差,即
di(t)=|pi(x,y,z,t)-p0(x,y,z,t)|i≠0
(6)

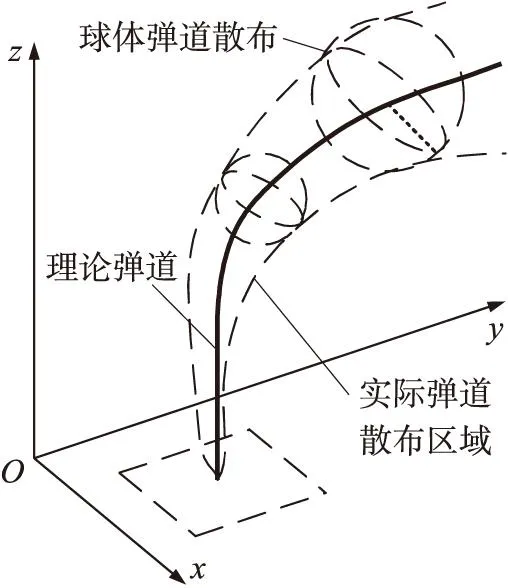
圖3 彈道散布表示方法示意圖
只要給出r(t)表達(dá)式,即得到彈道散布球體模型。下面按導(dǎo)彈的運(yùn)動(dòng)階段分別計(jì)算r(t)。在自然坐標(biāo)系中,帶有誤差的彈道會(huì)產(chǎn)生沿著理論彈道的切向誤差Δσ和垂直于理論彈道的法向誤差Δn。
這樣,散布球體半徑就可以通過(guò)切向誤差與法向誤差來(lái)描述:
(7)
在垂直上升段的無(wú)動(dòng)力飛行段,運(yùn)動(dòng)參數(shù)誤差Δv0與Δε0造成的散布球體半徑為
(8)
在垂直上升段的助推器工作段,考慮誤差衰減的散布球體半徑為
(9)

在程序轉(zhuǎn)彎段,考慮誤差衰減的散布球體半徑為
(10)

3共架垂直發(fā)射時(shí)間協(xié)調(diào)
建立的導(dǎo)彈散布球體模型反映了導(dǎo)彈在每時(shí)刻可能出現(xiàn)的區(qū)域。只要判斷2枚導(dǎo)彈在同一時(shí)刻的散布球體是否存在交集就可以判斷彈道是否可能產(chǎn)生沖突。
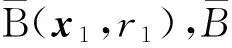
圖4 距離裕度示意圖
注意到,上述方法是將導(dǎo)彈當(dāng)作質(zhì)點(diǎn)處理,如果考慮導(dǎo)彈初始運(yùn)動(dòng)段姿態(tài)變化劇烈,更為保守的方法是進(jìn)一步考慮導(dǎo)彈的實(shí)際尺寸,此時(shí)可對(duì)散布球體半徑作如下處理:
r′=r+l
(11)
式中:r為導(dǎo)彈的散布球體半徑,l為導(dǎo)彈的半長(zhǎng)(考慮導(dǎo)彈質(zhì)心位置)。
定義2發(fā)射協(xié)調(diào)規(guī)則:在閉區(qū)間[t0,t2]上,當(dāng)Rmin>0時(shí),無(wú)空域沖突;當(dāng)Rmin≤0時(shí),存在空域沖突,需要進(jìn)行發(fā)射時(shí)間協(xié)調(diào)。此時(shí),將優(yōu)先級(jí)低的導(dǎo)彈延遲td時(shí)間發(fā)射,使協(xié)調(diào)后的距離裕度滿足Rmin>0。
由于R(t)形式復(fù)雜,難以求取最優(yōu)的發(fā)射間隔時(shí)間,所以采用迭代的方法求取較優(yōu)的發(fā)射間隔時(shí)間。當(dāng)考慮發(fā)射間隔時(shí)間后,R(t)變?yōu)镽(t,td),并且有
式中:λ為控制系數(shù),給定e>0,當(dāng)|td,i-td,i+1|
利用發(fā)射協(xié)調(diào)規(guī)則進(jìn)行發(fā)射時(shí)間協(xié)調(diào),過(guò)程如圖5所示。
圖5 發(fā)射時(shí)間協(xié)調(diào)流程圖
4算例分析
共架垂直發(fā)射導(dǎo)彈A與導(dǎo)彈B需要進(jìn)行發(fā)射時(shí)間協(xié)調(diào)。設(shè)導(dǎo)彈A發(fā)射優(yōu)先級(jí)較高。算例中不考慮導(dǎo)彈實(shí)際尺寸。
導(dǎo)彈A位于(0,0,0)處,冷發(fā)射,發(fā)射初速20 m/s,無(wú)動(dòng)力飛行時(shí)間2 s;助推器提供加速度11g,助推器工作3 s,轉(zhuǎn)彎終點(diǎn)俯仰角30°,偏航角60°;速度通道調(diào)節(jié)時(shí)間2 s,偏航通道調(diào)節(jié)時(shí)間2 s,俯仰通道調(diào)節(jié)時(shí)間1.5 s。
導(dǎo)彈B位于(0,5,0)處,冷發(fā)射,發(fā)射初速20 m/s,無(wú)動(dòng)力飛行時(shí)間2 s;助推器提供加速度11g,助推器工作3 s;轉(zhuǎn)彎終點(diǎn)俯仰角40°,偏航角40°;速度通道調(diào)節(jié)時(shí)間2 s,偏航通道調(diào)節(jié)時(shí)間2 s,俯仰通道調(diào)節(jié)時(shí)間1.5 s。
導(dǎo)彈運(yùn)動(dòng)參數(shù)誤差取3組大小不同的值,如表1所示。
表1 運(yùn)動(dòng)參數(shù)誤差取值
根據(jù)式(1)~式(4),仿真得到的2枚導(dǎo)彈理論彈道如圖6所示。
圖6 垂直發(fā)射導(dǎo)彈理論彈道
根據(jù)式(8)~式(10),仿真得到的彈道散布球體半徑如圖7所示,圖中t=5 s對(duì)應(yīng)虛線表示程序轉(zhuǎn)彎段開(kāi)始時(shí)刻。
圖7 導(dǎo)彈散布球體半徑
3組誤差取值下,取λ=0.1,采用四階Runge-Kutta法,步長(zhǎng)恒定為0.02 s時(shí)協(xié)調(diào)過(guò)程的計(jì)算耗時(shí)(包括導(dǎo)彈A的彈道與彈道散布計(jì)算耗時(shí)tA,導(dǎo)彈B的彈道與彈道散布計(jì)算耗時(shí)tB,距離裕度與發(fā)射間隔時(shí)間的計(jì)算耗時(shí)tC,及計(jì)算共用時(shí)tM),得到的間隔發(fā)射時(shí)間td如表2所示,3組誤差通過(guò)不同的λ得到的發(fā)射間隔時(shí)間如表3所示。根據(jù)表2中計(jì)算得到的發(fā)射間隔時(shí)間進(jìn)行發(fā)射協(xié)調(diào)前后的距離裕度如圖8所示。
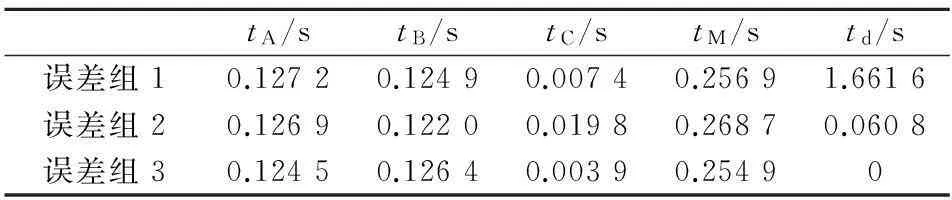
表2 時(shí)間協(xié)調(diào)計(jì)算耗時(shí)(運(yùn)動(dòng)參數(shù)誤差不同)
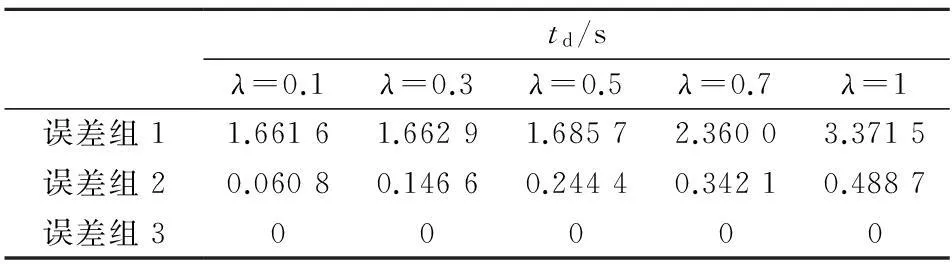
表3 選取不同λ計(jì)算得到的發(fā)射間隔時(shí)間
由表3可知,λ的取值過(guò)大會(huì)導(dǎo)致計(jì)算得到的間隔時(shí)間過(guò)長(zhǎng)。
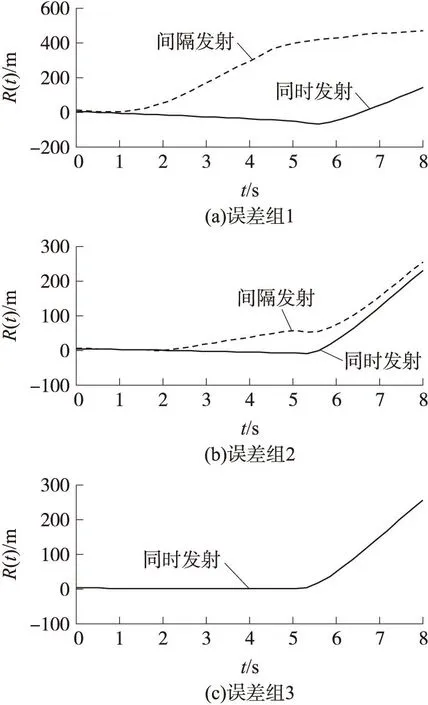
圖8 不同發(fā)射時(shí)間對(duì)應(yīng)的距離裕度
由圖8可知,運(yùn)動(dòng)參數(shù)誤差增大會(huì)使導(dǎo)彈沖突的可能性加大,利用計(jì)算發(fā)射間隔時(shí)間可以有效避免垂直發(fā)射導(dǎo)彈的初始彈道沖突,并為共架垂直發(fā)射導(dǎo)彈時(shí)間協(xié)調(diào)提供依據(jù)。而整個(gè)協(xié)調(diào)過(guò)程的計(jì)算耗時(shí)在100 ms級(jí),可以滿足任務(wù)的實(shí)時(shí)性要求。
5結(jié)束語(yǔ)
本文研究了艦艇共架垂直發(fā)射導(dǎo)彈的時(shí)間協(xié)調(diào)問(wèn)題,建立了導(dǎo)彈發(fā)射初始段運(yùn)動(dòng)模型和彈道散布體時(shí)域模型,在距離裕度為正的原則下確定發(fā)射間隔時(shí)間,避免導(dǎo)彈在初始彈道段的沖突。由仿真結(jié)果可以看出,該方法可有效地對(duì)初始彈道沖突進(jìn)行定量判斷和發(fā)射時(shí)間協(xié)調(diào)。模型和方法還可為艦載武器火力兼容判斷提供定量分析依據(jù)。
參考文獻(xiàn)
[1]劉方,辜健,邱志明,等.基于公共燃?xì)馀艑?dǎo)結(jié)構(gòu)的發(fā)射系統(tǒng)武器選擇與布局方法.海軍工程大學(xué)學(xué)報(bào),2012,24(2):53-56.
LIUFang,GUJian,QIUZhi-ming,etal.Methodsofweaponselectionandlayoutincommon-framelaunchsystembasedonpublicexhaustlauncher.JournalofNavalUniversityofEngineering,2012,24(2):53-56.(inChinese)
[2]桂秋陽(yáng),邱志明.基于垂直發(fā)射武器的火力交叉判斷模型.兵工學(xué)報(bào),2008,29(11):1 373-1 378.
GUIQiu-yang,QIUZhi-ming.Modeloftheestimationoffireintersectionbasedonverticallaunchweapons.ActaArmamentarii,2008,29(11):1 373-1 378.(inChinese)
[3]王義濤,王超.編隊(duì)協(xié)同防空作戰(zhàn)中的火力兼容判斷研究.現(xiàn)代防御技術(shù),2010,38(4):53-56.
WANGYi-tao,WANGChao.JudgingoffirecompatibilityinwarshipsformationcooperativeantiairModernDefenceTechnology,2010,38(4):53-56.(inChinese)
[4]姚躍亭,趙建軍,楊利斌,等.彈道預(yù)測(cè)下的艦艇編隊(duì)防空火力沖突判定.彈道學(xué)報(bào),2011,23(2):47-51.
YAOYue-ting,ZHAOJian-jun,YANGLi-bin,etal.Predicationoffirepowerconflictinfleetair-defensebyballisticestimation.JournalofBallistics,2011,23(2):47-51.(inChinese)
[5]孟海東,廖洪昌,郭荊燕,等.飛航導(dǎo)彈齊射發(fā)射時(shí)間的一種快速規(guī)劃算法.火力與指揮控制,2009,34(9):106-113.
MENGHai-dong,LIAOHong-chang,GUOJing-yan,etal.Anfastprogrammingarithmeticoflaunchtimewhenmanywindedmissilesarelaunchedsynchronously.FireControlandCommandControl,2009,34(9):106-113.(inChinese)
[6]高帆,李向林.垂直發(fā)射近程防空導(dǎo)彈全方位快速轉(zhuǎn)彎技術(shù)研究.現(xiàn)代防御技術(shù),2009,37(6):18-21.
GAOFan,LIXiang-lin.Vertical-launchshort-rangeairdefensemissile’sall-directionrapidturntechniquestudy.ModernDefenceTechnology,2009,37(6):18-21.(inChinese)