機載預警雷達對海快速穩定跟蹤方法?
2016-01-15 05:09:40
雷達科學與技術 2016年6期
(空軍裝備部73分隊,北京100843)
0 引言
機載預警雷達用于探測、跟蹤和識別空中及海面目標,與地面雷達相比,通常機載雷達天線口徑小,因此天線波束寬,難以獲得較高的角度測量精度。
高速運動的空中目標位置變化快,因而雷達測角誤差不會對目標航跡的穩定性產生明顯的影響。然而,海面艦船類目標運動速度緩慢,若雷達測角誤差較大,則在航跡跟蹤時易導致對目標航向和航速判斷錯誤。目前,常規的點跡凝聚優化算法和航跡跟蹤優化算法可提高定位精度,但無法快速穩定跟蹤,即便能夠跟蹤,艦船目標航跡的穩定性也無法保證[1-3]。
本文結合機載預警雷達處于高速運動狀態和測距精度高的特點,利用距離信息構建了一種簡單的交叉定位模型[4-8],可顯著提升機載預警雷達的定位精度,并可應用于工程實踐中。
1 交叉定位模型原理
假定機載預警雷達的一個掃描周期為5 s左右,在兩個相鄰掃描周期內,艦船目標移動距離通常只有二三十米。由于艦船類目標的高度近似處理為零,因而只要求解出目標在預警機慣性坐標下的位置,通過坐標變換即可得到目標的經緯度,求解出目標的具體位置。目標在預警機慣性坐標系下的位置可以利用雷達在多個不同時刻探測得到的目標距離綜合處理來獲得。由于艦船移動速度較慢,可認為在一個窗口內,艦船目標是固定目標。因此,可以利用各點擬合,得到較為精確的艦船位置。上述問題的數學描述如下。
假定目標靜止,載機運動,只考慮運動平面的二維情形,示意圖如圖1所示。Y軸為正北,X軸為東,坐標原點為載機初始位置。
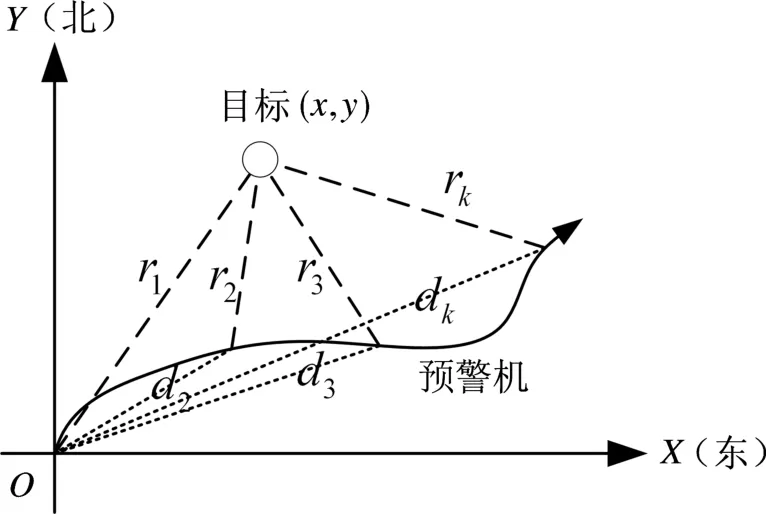
圖1 觀測示意圖
目標位置為(x,y),預警機進行等時間間隔的k次觀測,其運動狀態向量為X kw=[x k,y k,v kx,v ky]T,其中x k,y k分別為第k次觀測位置的X軸分量和Y軸分量;v kx,v ky分別為第k次觀測時速度的X軸分量和Y軸分量;r k為對應k次觀測時目標與觀測站間的距離,d k為第k次觀測時觀測站與坐標原點的距離,r為目標與坐標原點的距離。
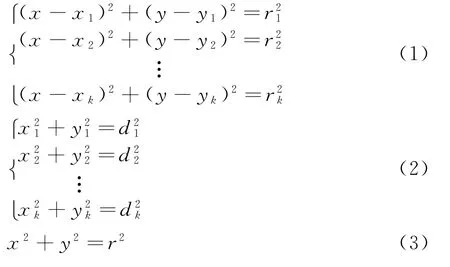
由式(1)~(3)可得


一般情況下,可假設預警機觀測時近似進行勻速直線飛行,航速V w,航向K w,此時:
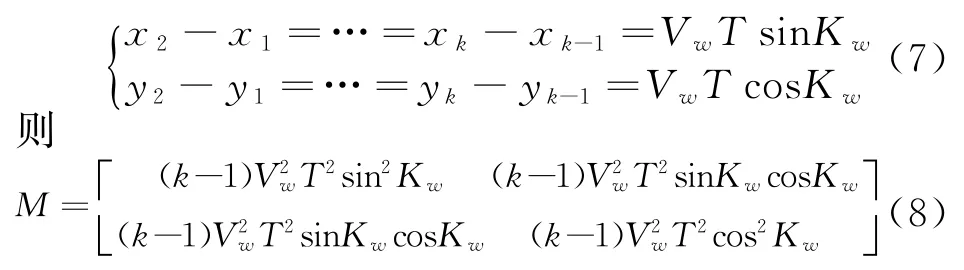
計算可得detM=0,方程組不存在唯一解。如圖2所示,S k-1和S k分別為預警機在第k-1和第k次量測時的位置,航向北偏東θ,在預警機飛行方向的左右兩側有一真一假兩個目標A和A′,可以通過回波接收陣面來判定真實的目標。對量測結果進行坐標轉換,Y′軸指向機頭方向,轉移矩陣如果左陣面收到回波,則x′<0;反之x′>0。
由于距離誤差的存在,k次量測交叉點不重疊,解算目標A和A′的位置參數,通過求取i(1<i<k)次觀測的平均值確定目標的參數,控制目標位置估計精度和收斂速度。經過多個掃描周期時可以逐步提高定位的精度。
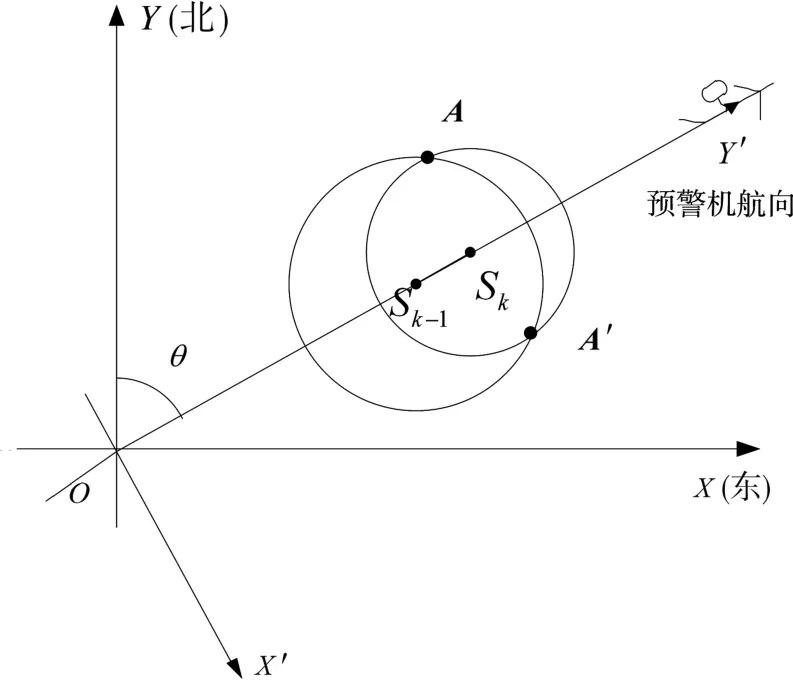
圖2 運動觀測站對靜止目標的可觀測性分析
2 交叉定位模型仿真結果
1)仿真條件
假設目標不動,其位置坐標為(180 km, 240 km),飛機作勻速直線運動,速度為220 m/s,航向為0°,雷達掃描間隔時間為5 s,進行40次量測,距離觀測誤差為60 m。
2)仿真結果分析
對上述運動過程進行仿真實驗,其結果如圖3和圖4所示。進行坐標變換,將慣性坐標系轉換的載機極坐標系,進行1 000次仿真實驗,求得方位誤差約為0.6°,與預警機的方位探測誤差相當。
從圖3、圖4可以看出,該算法收斂速度較快,約6次觀測后目標X、Y坐標的估計便可達到穩定狀態且與真實值之間的誤差較小,即需要大約30 s的時間即可收斂到較滿意的精度。圖3、圖4的仿真結果表明,本文提出的交叉定位方法不僅能夠滿足實際工程的精度需要,而且收斂速度較快。
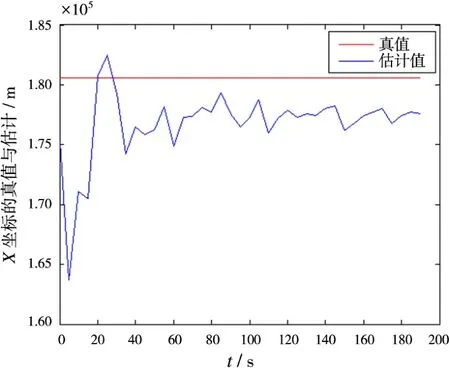
圖3 目標X坐標的估計

圖4 目標Y坐標的估計
3 交叉定位模型實際應用
將該方法應用到某場景中,機載雷達對海面艦船目標探測,結果如圖5所示。其中,X表示目標的橫坐標,Y表示目標的縱坐標。圖中虛線為目標的實際航跡,標注原點的實線為采用本文方法后的目標航跡,標注矩形的實線為常規方法得到的目標航跡。
從圖5所示的實際探測結果可以看出,與常規方法相比,本文提出的交叉定位方法對艦船等慢速目標可以更快地達到穩定跟蹤狀態。
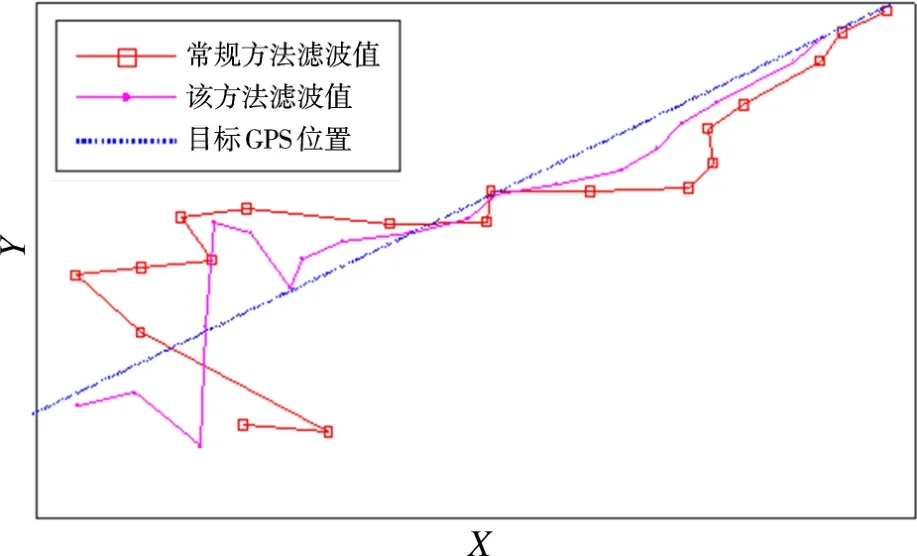
圖5 對艦船目標航跡起始情況
4 結束語
針對探測海面目標時,機載預警雷達方位測量精度較低,導致在形成目標航跡時難以快速收斂的難題,本文提出了一種結合機載預警雷達距離探測精度高和預警平臺運動速度快的特性,利用相鄰探測時間的目標回波距離來準確定位目標方位的交叉定位方法。仿真結果和實際應用情況表明,所述方法利用較高的測距精度估算方位信息,計算快速,且不需要初值,可用于機載預警雷達在航跡跟蹤起始初期快速得到較高位置精度。
[1]陸軍,酈能敬,曹晨,等.預警機系統導論[M].2版.北京:國防工業出版社,2011:100-200.
[2]劉波,沈齊,李文清.空基預警探測系統[M].北京:國防工業出版社,2012:250-300.
[3]RISTIC B,ARULAMPALAM S,MCCARTY J. Target Motion Analysis Using Range-Only Measurements:Algorithms,Performance and Application to ISAR Data[J].Signal Processing,2002,82(2):273-296.
[4]梁玥,劉忠.靜止目標純距離測量下的定位原理與方法研究[J].指揮控制與仿真,2009,31(4):26-29.
[5]王璐,劉忠,夏清濤.單站航路機動對純距離目標定位精度影響分析[J].華中科技大學學報(自然科學版), 2015,43(8):58-61.
[6]劉宏強,魏賢智,李飛,等.基于射頻隱身的雷達跟蹤狀態下單次輻射能量實時控制方法[J].電子學報, 2015,43(10):2047-2052.
[7]李川,靳俊峰,曲成華.基于區域約束的機場場面目標跟蹤[J].雷達科學與技術,2015,13(6):563-566. LI Chuan,JIN Junfeng,QU Chenghua.Surface Movement Target Tracking Based on Region Constraint[J].Radar Science and Technology,2015,13 (6):563-566.(in Chinese)
[8]許紅,謝文沖,高飛,等.機載預警雷達海面多目標航跡起始算法研究[J].雷達科學與技術,2015,13(6): 655-659. XU Hong,XIE Wenchong,GAO Fei,et al.Track Initiation of Sea Surface Multi-Targets for Airborne Radar[J].Radar Science and Technology,2015,13 (6):655-659.(in Chinese)