預警機協同探測拱形任務線陣位配置?
2016-01-15 05:09:49
雷達科學與技術 2016年6期
(空軍預警學院,湖北武漢430019)
0 引言
預警機在遂行重點目標防御和空襲作戰任務時,由于防空威脅角過大、多目標保護預警線和空襲探測責任區過長等原因,致使單預警機不能有效遂行作戰任務,因此需要多預警機協同完成作戰賦予的使命任務,其協同模式可分為兩種: Model 1——各預警機獨立遂行探測任務,目標情報不進行融合處理;Model 2——各預警機情報由指定預警機或上級情報中心進行融合處理。目前, Model 1的多預警機聯合探測問題的研究較為深入。文獻[1]提出了多預警機并立和串接組合兩種空域配置協同探測方案,并對其進行了定量分析,得出在預警機架數有限的前提下,串接航線易造成穩定覆蓋區域不穩定,易形成盲區的結論。文獻[2]提出了一種基于累積檢測概率矩陣2-范數的單機航線優化準則,并討論了多預警機飛行時間間隔和航線間隔對重點監視區域累積發現概率的影響問題。文獻[3]提出了基于作戰任務和需求,合理配置預警機巡邏空域,并據此得出預警機兵力使用策略。文獻[4]基于雷達干擾自衛距離公式,討論了有源干擾條件下的多預警機部署優化問題。上述文獻均未涉及多預警機信息融合處理。
本文詳細分析了兩種協同模式的多預警機凸形任務線協同空域配置問題,對任務線、預警機陣位線和等效圓心之間的關系進行了定量描述;運用等概率密度場的方法,對多預警機兩種協同方式的可行性進行了定量分析;構建了通用性的多預警機空域配置估算模型。文中構建的各種估算與決策模型考慮了各種主要的內、外因素,具有實用價值。通過仿真,分析了兩種模式下多預警機空域配置和資源使用問題,并得出Model 2明顯優于Model 1的重要結論。
1 任務線建模
當多架預警機采用并立航線協同遂行目標探測任務時,令各預警機航線中心點E i(i=1,2,…,n)均與陣位線重合,且Oequ和αequ分別為等效圓心和等效扇面角,預警機巡邏直飛航線與過航線中心點的中層防空預警線(責任區遠界)半徑相垂直,則實時探測區是以直飛航線四端點為圓心、以最大探測距離為半徑的交疊區域(圖1中陰影區域)[5]。
圖1 預警機空域配置態勢圖
圖1(a)、(b)為多預警機協同遂行防御作戰任務時的空域配置態勢圖,圖中Od和O j(j=1, 2,…,m)所對應威脅角αd和αj的大小與對方機場和重點目標距離,以及對方戰斗機續航能力有關[6-7]。陣位線與中層防空預警線的距離dzh_d和dzh_ft、陣位線與多目標分布線距離Dzy_d和Dzy_ft則與對方戰斗機最大平飛速度和續航能力有關。不失一般性,設對方戰斗機對于每個重點目標的攻擊能力相同,則可用一條與m個重點目標中層防空預警線相切的弧線定量表示防御方整體中層防空預警線。因此,陣位線、中層防空預警線和重點目標分布線均是以Od或Oequ點為圓心,以αd或αequ為扇面角,且按不同距離構筑的弧線,而多架預警機應以近似“橄欖”形的實時探測區對中層防空預警線進行全面覆蓋。
圖1(c)為多預警機協同遂行空襲作戰任務時的空域配置態勢圖,令任務劃定責任區成拱型,Wtc_t為責任區縱深,Dsy_gt為陣位線到責任區近界距離。責任區遠界、近界和陣位線均是以Oequ點為圓心,以αequ為扇面角,且按不同距離設置的弧線,因此,此時的“橄欖”形的實時探測區只需對責任區遠界進行全面覆蓋即可。
令圖1(b)、(c)中等效半徑|OequO1|和|OequO3|為Requ,等效扇面角為αequ,等效弦長|Q1Q2|和|Q3Q4|為lxc、等效弓高|P1P2|和|P3P4|為hgg,則

再令圓心到陣位線距離dtx=Dzy_d=Requ-dzh_ft= Requ-Wtc_t,圓心到任務線距離Rtx=dzh_d+Dzy_d= Requ,任務扇面角αtx=αd=αequ,任務線長度ltx= Rtxαtx,則3種預警機作戰任務可歸結為一類針對凸形任務線實時有效全覆蓋時的預警機空域配置問題。
2 協同模式瞬時覆蓋區估算
2.1 綜合發現概率估算
令預警機有效遂行作戰任務所需發現概率為Pd_mis,則兩種協同模式時的多預警機綜合發現概率Pdcoss的估算公式為
式中,Pdik為第i(i=1,2,…,n)架預警機在距離其k(k=1,2,…,u)點處獨立探測目標時的發現概率,令此時預警機探測距離為Rdik。
2.2 遂行不同任務時的實際Rdik估算
防空警戒和對空引導是預警機的兩項主要作戰任務[8],所需發現概率Pd_mis={0.5,0.8}、虛警概率Pfa=10-6。對于每部機載預警雷達而言,實際Rdik與所探測目標類型有關。對于防空警戒和對空引導兩項任務而言,令目標RCS為常量,機載預警雷達最大探測距離Rmaxi,且令第i架預警機在k點處的Rdik=KequikRmaxi,Kequik是發現概率為Pdik時實際探測距離的折算系數,則可根據文獻[9]提供的估算方法,構建Pdik與Rdik之間的關系曲線(如圖2所示),顯然其為單調遞減函數。
圖2Pdik與Kequi的關系
2.3 協同模式瞬時綜合覆蓋區估算
不失一般性,令任意兩架預警機協同工作,則兩種協同模式時的綜合瞬時覆蓋區可按以下流程進行估算:
Step1 獲取各預警機在發現概率為Pd_mis時特定目標類型的最大探測距離Rmaxi。
Step2 擬合圖2中各具體觀測目標類型Pdik與Rdik之間的關系曲線,獲得Rdik與Pdik關系式。
Step3Rdik解算:
1)根據式(2)約束條件和圖2結論,設定第i-1架預警機發現概率的取值范圍為Pdi-1k∈[0,Pd_mis];
2)令Pdcoss=Pd_mis,且根據式(2)兩種協同模式方程和Pdi-1k取值范圍,解算第i架預警機相應Pdik值;
3)通過Step2解算兩種協同模式Pdik和Pdi-1k對應的Rdik和Rdi-1k值。
Step4 設置兩架預警機之間瞬時間距dsi-1值,并以i-1架預警機瞬時陣位為坐標原點,以兩架預警機瞬時陣位連線為X軸,構建直角坐標系。
Step5 以各預警機瞬時陣位為圓心,以兩種協同模式相應Rdik和Rdi-1k為半徑,解算各交點坐標。
Step6各交點的連線即為Model1和Model2協同瞬時覆蓋區邊界。
令相同型號預警機協同遂行作戰任務,探測施威林Ⅰ型目標,RCS相同,Pd_mis={0.5,0.8},Pfa=10-6時Rmaxi=1,則Rdik=Kequik,當任意兩架預警機ds=1.6Rmax時,其Model1和Model2協同瞬時覆蓋區邊界如圖3所示,F1和F2是兩預警機Rdi-1k=Rdik時的交點,其對應圖2中Pd_d時Kequik的取值。
圖3 兩種協同模式瞬時覆蓋區域仿真圖
圖3中,Model 2協同瞬時覆蓋區邊界是以各預警機Pdik可降為零的前提條件下繪制的,這在實際中顯然不合理。如圖4所示,實際預警機機載雷達的脈沖重復周期Tr是一定的,且一般分為3段:tzc段與規定的機載預警雷達的Rmax之間存在對應關系;try段為設計者預留冗余時間,tzc+try稱為“工作期”;tfx段為“休止期”,常用于干擾分析和BIT。顯然,Model 1可用時間段為tzc,而Model 2可用時間段為tzc+try,因此,Model 2最遠可用探測距離Rky=(tzc+try)C/2。令分別以第i-1和第i架預警機瞬時陣位為圓心,相應Rkyi-1和Rkyi為半徑的兩圓交集面積為
圖4 實際預警機機載雷達的脈沖重復周期分配
Ss_crossi-1,相應以Rmaxi-1和Rmaxi為半徑的圓面積分別為Ssi-1和Ssi,當Pdik可降為零時Model 2瞬時覆蓋區面積為SModel2i-1,則相鄰兩架預警機不同協同方式時的瞬時覆蓋區為

3 空域配置建模
令多預警機協同遂行對空警戒任務,且針對不同重點探測目標類型時,任意一架預警機所用工作方式的Rkyi均不大于圖2中Pd_d所對應的Rdik取值。如圖5所示,第i架預警機巡邏直飛航線4個端點分別為AYi,BYi,CYi和DYi,且直飛航線長度|AYi BYi|=|CYi DYi|=LYi=2a i,轉彎直徑|AYiCYi|=|BYi DYi|=WYi=2b i。當多預警機對任務扇面角αtx遂行作戰任務時,其協同探測相交邊界均是由CYi點和DYi+1點為圓心,Rmaxi、Rkyi和Rmaxi+1、Rkyi+1為半徑的圓形構筑,兩種協同模式均以E i-1為坐標系原點,Y軸垂直于預警機巡邏直飛航線,構建XE i-1Y直角坐標系。對于Model 1而言,多預警機協同空域配置態勢如圖5(a)所示,U1是以DYi-1為圓心、以Rmaxi-1為半徑的實時探測邊界和任務線的交點,U2是分別以CYi-1、DYi為圓心,以Rmaxi-1、Rmax為半徑的實時探測邊界交點,且與任務線重合,則∠U1OU2=ωti-1,∠E i-1OE i= γti-1,顯然|OU1|=|OU2|=Rtx,|OE i-1|=|OE i|= dtx,聯立方程組:
可求得U2坐標為(x U2,y U2),則第i-1架預警機單獨覆蓋任務線對應O點角度ωti-1,以及第i-1架與第i架預警機之間空域配置角γti-1為
因此,當任務扇面角為αtx時,所需預警機同時出動架數n的約束條件為

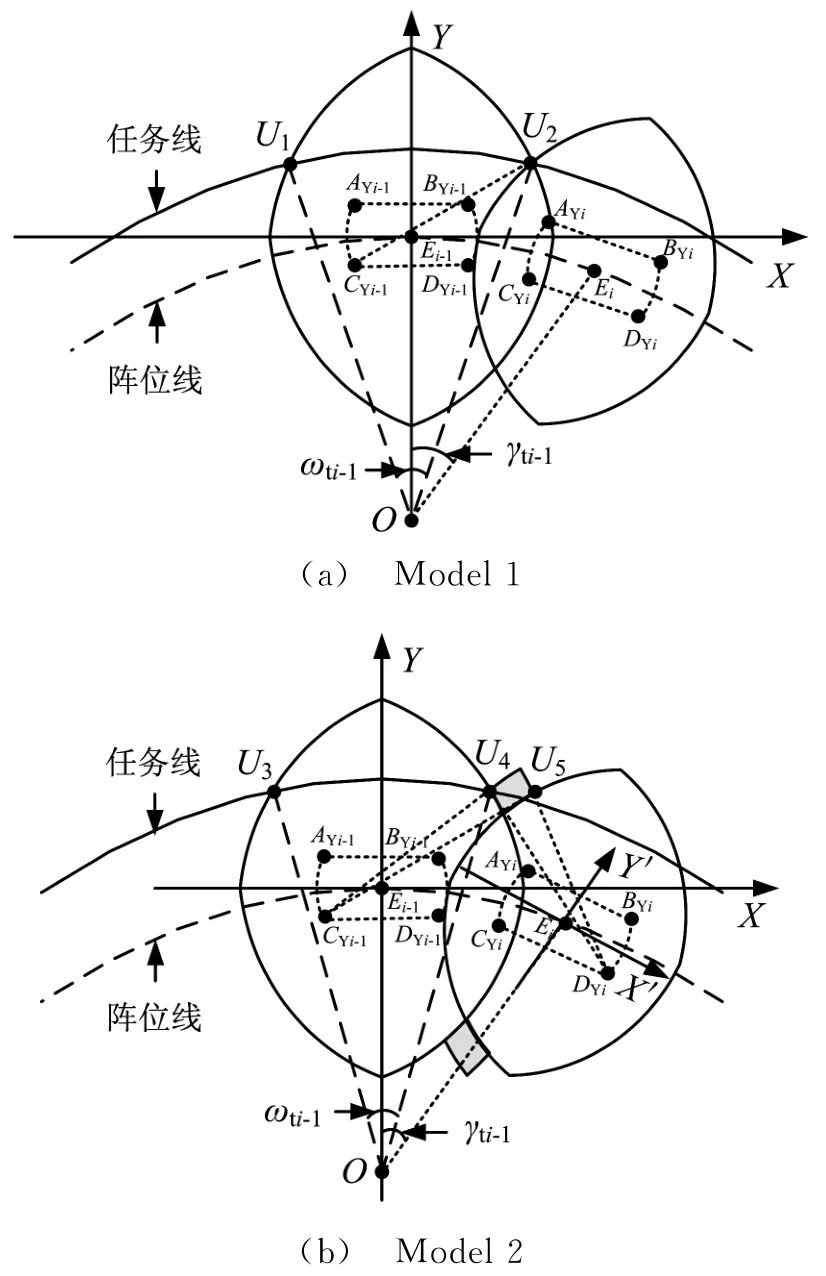
圖5 多預警機拱形任務線協同覆蓋示意圖
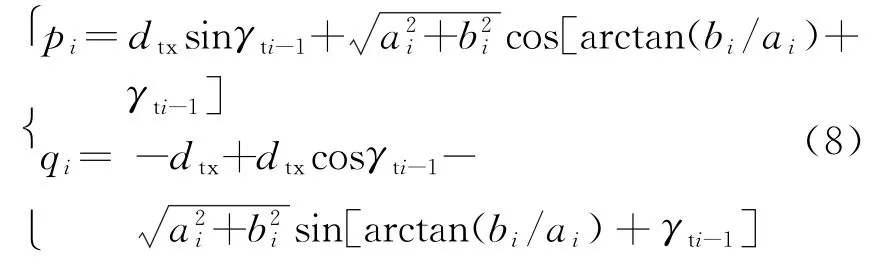
對于Model 2而言,多預警機協同空域配置態勢如圖5(b)所示,U3是以DYi-1為圓心、以Rmaxi-1為半徑的實時探測邊界和任務線的交點,U4是分別以CYi-1、DYi為圓心,以Rmaxi-1、Rkyi為半徑的實時探測邊界的交點,U5是分別以CYi-1、DYi為圓心,以Rkyi-1、Rmaxi為半徑的實時探測邊界的交點,∠U3OU4=ωti-1與Model 1中∠U1OU2相同,∠E i-1OE i=γti-1。令DYi在坐標系XE i-1Y下的坐標為(p i,q i),以E i為坐標原點,巡邏直飛航線的垂直平分線為Y′軸,構建X′E i Y′直角坐標系,將坐標系X′E i Y′下坐標(x′,y′)逆時針旋轉并平移到坐標系XE i-1Y下坐標(x,y)的轉換公式為
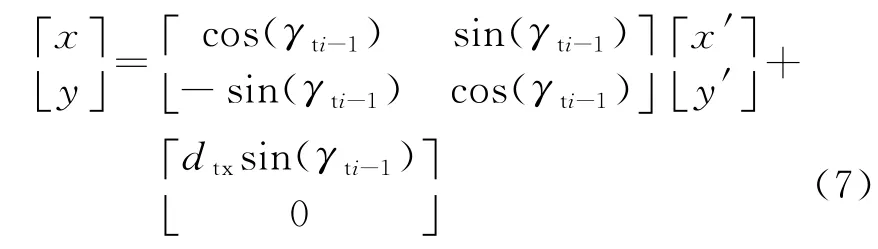
則p i、q i值為
因CYi-1在坐標系XE i-1Y下坐標為(-a i-1,-b i-1),聯立方程組:可求得U4坐標為(x U4,y U4)。
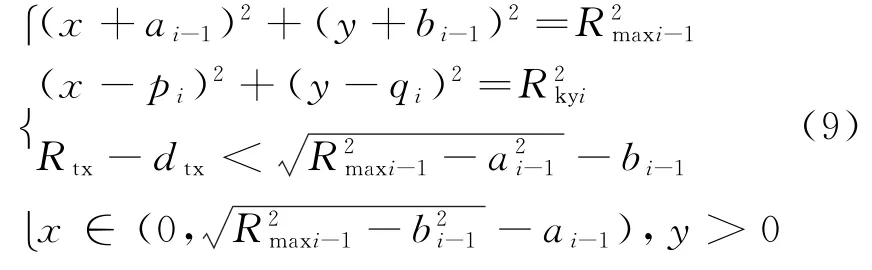
在XE i-1Y坐標系下聯立方程組:
可求得U5坐標為(x U5,y U5)。
令|OU4|和|O U5|均為Rtx,則可構建方程:

從而求得|OU4|和|OU5|分別對應的γti-1,1和γti-1,2,由于任務線需被預警機實時全覆蓋,因此第i-1架與第i架預警機之間空域配置角γti-1=min{γti-1,1,γti-1,2}。
當任務扇面角為αtx時,所需預警機同時出動架數n的約束條件為
4 仿真分析
4.1 陣位對比分析
為便于分析兩種協同模式的差別,令相同型號預警機遂行對空警戒作戰任務,且巡邏直飛航線LY為80 km,轉彎直徑WY為20 km,圓心到任務線距離Rtx=600 km,圓心到陣位線距離dtx∈[300 km,600 km]。不失一般性,當Pd=0.5、Pfa=10-6,且預警機對雷達有效截面為2 m2的施威林I型目標進行探測時,Rky/Rmax=1.16(Kequik=1.161)。則dtx與兩種協同模式下相鄰兩架預警機陣位角γt的關系曲線如圖6所示,則可得出以下結論。
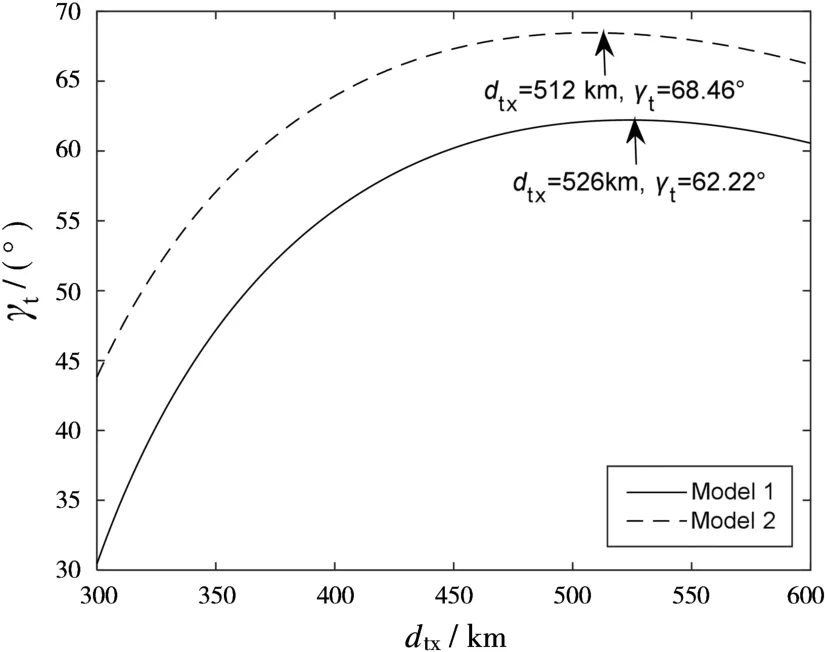
圖6 dtx與γt的關系曲線
1)在多預警機協同探測能力范圍內,不論dtx取何值,Model 2比Model 1的γt角均大,說明相同戰場環境下,使用Model 2協同方式比使用Model 1協同方式可覆蓋更長的任務線;
2)分別使用Model 1和Model 2協同方式,在dtx為526 km和512 km時γt均達到最大值,其原因是此時任務線被預警機協同實時探測區橫向最寬處所覆蓋。
令相同dtx時,Model 2與Model 1的γt角差值為γcz_t,則dtx與γcz_t的關系曲線如圖7所示,γcz_t隨dtx的增加而減小,說明預警機陣位線越靠近任務線,使用Model 2比使用Model 1協同方式的優勢越小。

圖7 dtx與γcz_t的關系曲線
4.2 αtx與n取值關系分析
令dtx=370 km,任務扇面角αtx∈[0°,360°],戰場環境和預警機固有探測能力及巡邏航線均與上面相同,則所需同時升空預警機架數n與αtx的關系如圖8所示,由此可得出以下結論:
1)單架預警機覆蓋αtx角度為51.3°,說明當αtx≤51.3°時,預警機無需任何協同方式,單架獨立作戰即可有效遂行對空警戒任務;
2)當同時升空兩架預警機時,分別使用Model 1和Model 2進行協同,其覆蓋αtx角度分別為102.6°和111.6°,說明在102.6°<αtx≤111.6°時,Model 2比Model 1即可節約一架同時升空的預警機資源;
3)隨αtx變大,Model 2比Model 1節約預警機資源效果越明顯;
4)在292.7°<αtx≤360°時,Model 2增加第6架預警機對αtx角的覆蓋范圍均大于之前每增加一架時αtx的增大范圍,其原因是此時第6架預警機與第1架預警機之間已可通過相互協同有效遂行作戰任務。
5 結束語
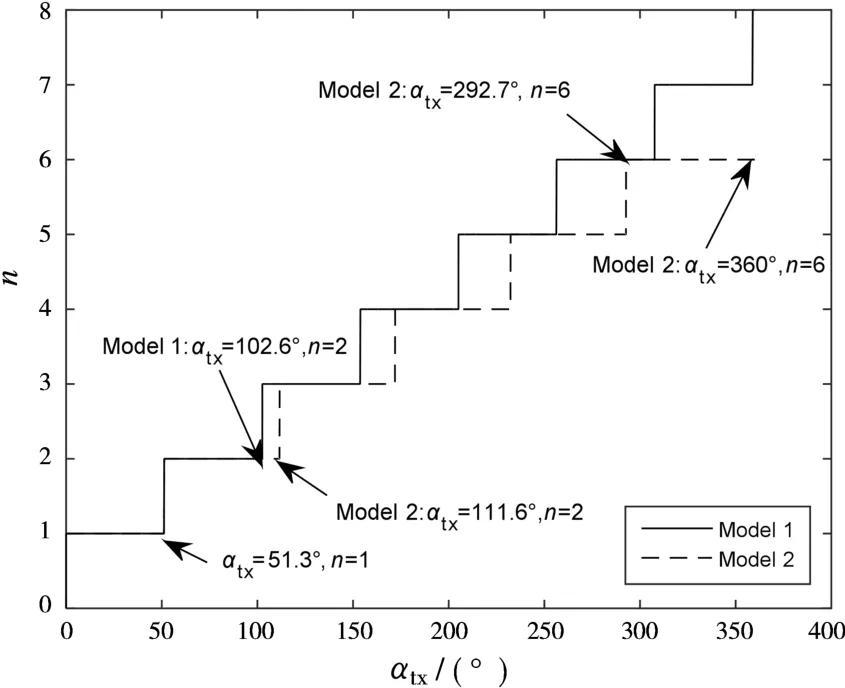
圖8 αtx與n的關系曲線
本文針對凸形任務線多預警協同空域配置問題,提出兩種協同模式,并通過構建其瞬時覆蓋區估算模型,對Model 1和Model 2的空域配置進行定量描述,所建模型考慮了各種主要的內、外因素。通過仿真,分析了兩種協同方式時相鄰兩架預警機陣位角與關鍵參數之間的關系,并得出在多預警機協同作戰資源使用方面, Model 2明顯優于Model 1的結論。文中提出的空域配置原則、定量模型,以及仿真結論可供實際預警機兵力部署決策時參考使用。由于篇幅有限,本文未涉及拱形任務線和直線形任務線時多預警機協同空域配置問題,而這些問題有待進行專題研究。
[1]劉波,陳春暉,沈齊.機載預警雷達協同探測航線模式研究[J].現代雷達,2012,34(6):1-4.
[2]付瑩,湯子躍,孫永健.機載預警雷達協同探測航線優化[J].紅外與激光工程,2014,43(12):4177-4185.
[3]陳云翔,張毅,莊駿,等.基于作戰方向的預警機需求確定方法[J].火力與指揮控制,2014,39(8):94-97.
[4]王國師,李強,錢瓊芬,等.有源干擾條件下多預警機空中部署及優化[J].紅外與激光工程,2012,41 (11):2973-2980.
[5]劉波,沈齊,李文清.空基預警探測系統[M].北京:國防工業出版社,2012:211-215.
[6]程子光,王洪林,姜禮平,等.大型海上編隊空中威脅扇面角定量研究[J].空軍雷達學院學報,2012,26 (3):195-198.
[7]馮威,王平,許小明.航母編隊可能受到的敵空襲威脅扇面大小確定方法研究[J].艦船電子工程,2010,30 (12):61-62.