基于MATLAB的汽車ABS制動過程仿真
2016-01-16 06:44:42宋龍龍,鄭培,范滿珍
現代機械 2015年4期
基于MATLAB的汽車ABS制動過程仿真
宋龍龍1,鄭培1,范滿珍2
(1.內蒙古工業大學能源與動力工程學院,內蒙古呼和浩特0100512. 山東理工大學交通與車輛工程學院,山東淄博255000)
摘要:汽車上安裝的ABS關系到汽車行駛制動過程中的穩定性和駕駛員的安全,所以對于ABS的研究至關重要。根據某車型建立了單輪系統模型和輪胎附著系數模型,第一,應用MATLAB在制動減壓、增壓和保壓過程中進行:滑移率、車輪中心速度、線速度、地面制動力和制動力矩等參數的變化過程仿真;第二,仿真出不同質心位置對防抱制動系統的影響。由仿真圖像可以清晰的看出每一個參數的變化過程,便于對今后ABS的改進有更好的理論依據,并且可知,當質心的位置由后向前變大時,可以使制動時間縮短,確保行車的安全。
關鍵詞:ABS制動MATLAB仿真
中圖分類號:U463.54文獻標識碼:A
作者簡介:宋龍龍(1986-),男,漢,碩士研究生,研究領域:轉向系統,研究方向:純電動汽車調速系統。
收稿日期:2014-12-25
Simulation of automotive ABS braking process based on MATLAB
SONG Longlong, ZHENG Pei, FAN Manzhen
Abstract:ABS is related to the stability of car braking and the safety of the driver. In this paper, a single wheel system model and a tire adhesion coefficient model are established based on a vehicle model. First, through the application of MATLAB, simulation of the changing process of such parameters as center of wheel slip, wheel speed, line speed, ground-braking force and braking torque are carried under the conditions of decompress, pressure boost and pressure maintaining of braking. Second, the effect of different location of the centre of mass on the anti-lock braking system is explored through simulation. The whole changing process of every parameter can be seen clearly through the simulation image, which facilitates the improvement of ABS theoretically. It is also found that when the position of the centre of mass changes bigger when moving from rear to forepart, braking time can be shortened, which ensures traffic safety.
Keywords:ABS; brake; MATLAB; simulation
0引言
最初,ABS應用于航空和鐵路領域,取得了一定的進展。直到二十世紀五十年代,ABS才開始在汽車上使用,隨著大規模單片機模塊在防抱制動系統上得到利用,控制模塊體積縮小,可靠性得到提高,車輛上逐步安裝了防抱制動系統。在過去,對于汽車ABS的產品開發中,主要依靠大量的實車試驗,這樣會造成開發周期和費用的大大增加[1]。
為了降低研究防抱制動系統的費用,提高研究效率,本文使用仿真軟件MATLAB對ABS進行數據仿真,減少不必要的實車試驗操作,得到了在防抱制動時具體參數的變化過程。
1基本理論知識
1.1車輪的制動力
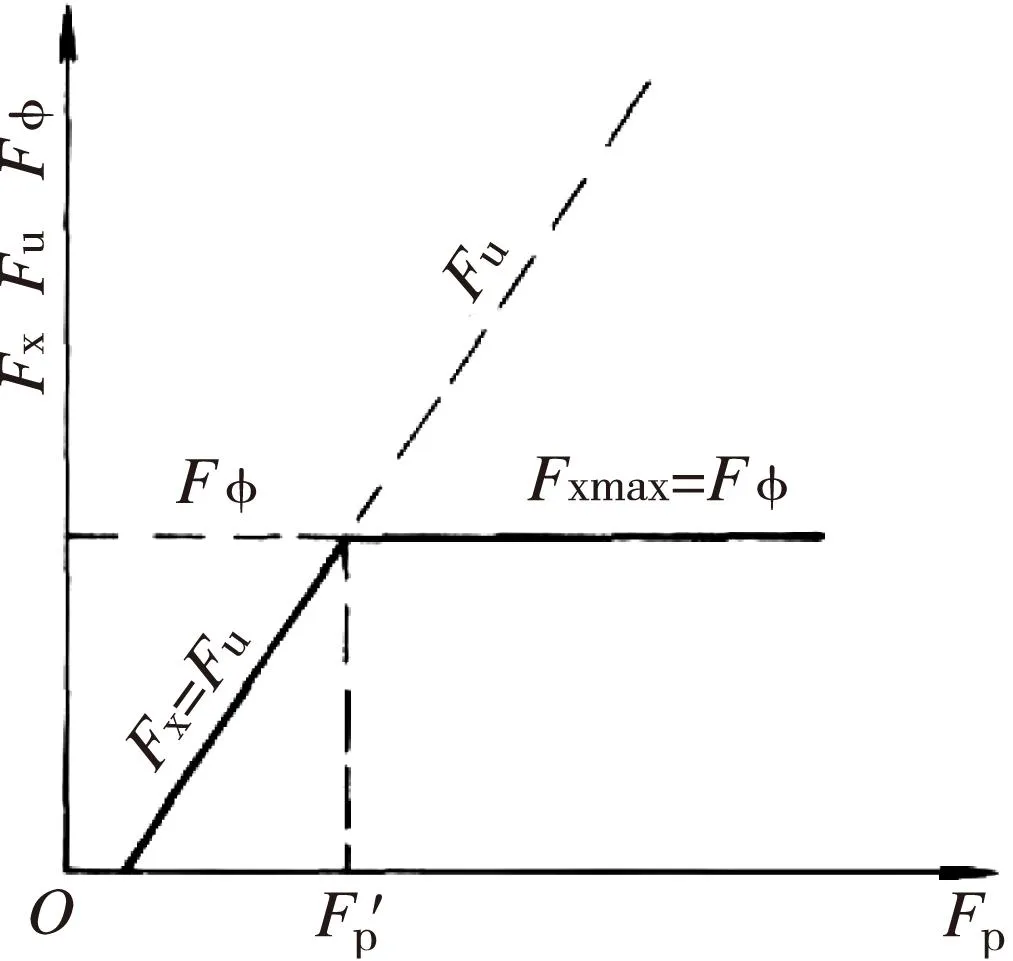
圖1 制動過程中地面制動 力、制動器制動力及附著 力的關系
汽車在制動過程中,假設輪子的行駛狀態只有抱死拖滑和滾動,由于制動踏板力Fn是逐漸增大的一個過程,所以在剛開始的時候,輪胎是處于滾動狀態的,因為地面與輪胎之間的摩擦力即地面制動力Fxb,足以克服制動器摩擦力矩而使車輪滾動。顯然,車輪滾動時的地面制動力就等于制動器制動力Fu,且隨著踏板力的增長而成比例的增長,但是地面制動力是滑動摩擦的約束反力,它的值不能超過附著力Fω,即地面附著力隨著踏板力的增長達到附著力時,就會保持不變而不再增加,此時車輪已經抱死開始滑拖[2]。隨著踩踏板的繼續增加,此時制動器制動力還會繼續上升。各力變化關系如圖1所示。
1.2ABS工作原理及作用
防抱制動裝置(Antilock Braking System,簡稱ABS)是指在制動過程中防止車輪被制動抱死,提高汽車的方向穩定性和轉向操縱能力,縮短制動距離的裝置[2]。
(1)ABS結構組成
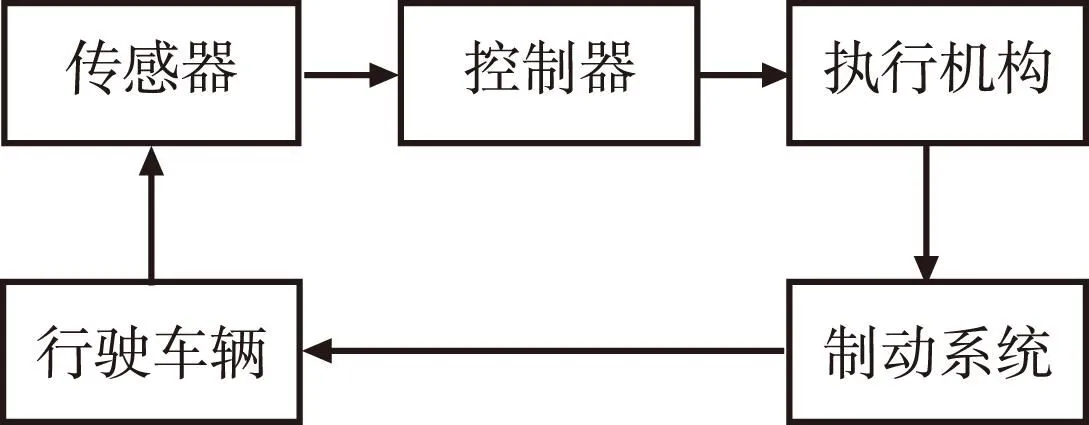
圖2 ABS系統結構框圖
總的來說,裝有ABS的汽車制動系統由兩部分組成,即基本制動系統和制動力調節系統。前者是制動主缸、制動輪缸和制動管路等組成的普通制動系統,可以完成汽車的常規制動。而后者是由輪速傳感器、ABS控制器、執行器等構成的壓力調節控制系統,在制動過程中以保證車輪由始至終不會抱死,車輪的滑移率一直在合理范圍之內[3]。系統框圖如圖2所示。
(2)滑移率s
車輛在制動過程中,依次會出現單純的滾動、邊滾邊滑和拖滑。一般我們用滑移率s來描述汽車在制動過程中滑動成分所占的比例。其定義為:
(1)
式中:uw為車輪的中心速度;r為車輪的滾動半徑;wr為車輪旋轉角速度[4]。
一般,當滑移率在15%~20%左右時,制動性能最好,汽車能夠在制動過程中穩定行駛。
(3)工作原理
在剛踩下制動踏板時,ABS是不起作用的,隨著踏板力的逐漸增加,車輪的速度、角減速度、滑移率等參數開始發生變化,ECU會對這些信息作出處理。如:滑移率s超過門限值20%時,ABS開始工作,進入制動減壓階段,然后進入保壓階段,反之,滑移率低于門限值15%時,開始制動增壓,以便維持在峰值附著系數左右,防止車輪抱死,達到最好的制動效果,反復循環直至汽車停止。
(4)防抱制動系統的作用
a)能夠防止在制動過程中前輪發生抱死,保證制動時的方向穩定性。
b)防止后軸抱死發生側滑,偏移正常行駛的車道,并可以提高制動效率。
c)制動距離能夠大大縮短。
2單輪系統動力學模型
為了研究車輪在抱死過程中各參數的變化,本文以汽車單輪模型為對象進行分析,忽略空氣阻力和車輪滾動阻力的作用,則系統的運動微分方程為:
Fxb=Fzfφ
(2)
(3)
(4)
式中:Fxb為地面制動力;m為單輪模型的質量;I為車輪的轉動慣量;Tb為車輪的制動力矩。
車輛在實際制動過程中,車輪的載荷會由于制動時的慣性而發生變化,不是一個定量。例如,拿前輪來說,在制動時,制動減速度j會隨著前輪載荷的變化而發生變化,其關系式為:
(5)
3輪胎附著系數模型
車輛在制動中,輪胎沿地面的附著力,不但受到縱向的力,而且常常還會受到側向力的作用,使車發生側滑現象。故側向力的分析也至關重要。
附著系數與滑動率的關系一般為非線性的,在仿真中將其分段現象化。
縱向附著系數φ與滑動率s為分段函數,即:
(6)

(7)
側向附著系數φc與滑動率s的關系式為:
φc=φ0(1-s)
(8)
式中:φh為峰值附著系數;φg為滑移率是100%時的附著系數;φ0為滑移率是0時的附著系數;s0為峰值附著系數所對應的滑移率;
4MATLAB模型仿真
基于仿真,選擇某車型的ABS動力學模型參數,其具體數值如表1所示。
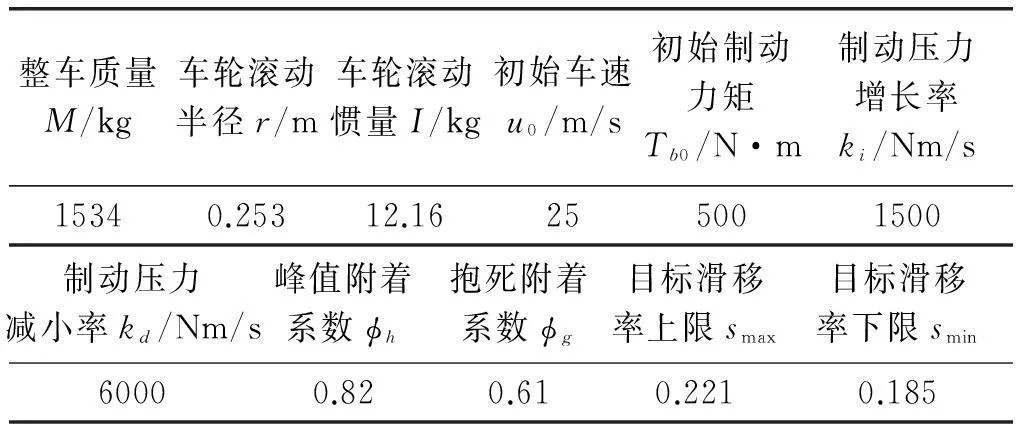
表1 ABS動力學模型參數
4.1制動過程仿真及分析
根據理論分析在MATLAB中編寫M程序,首先輸入表1中的各個具體參數,并編寫單輪系統模型和輪胎附著系數模型的公式,對滑移率作出判斷使其保證在預先設計好的目標滑移率的上限和下限之間,并由編輯的公式計算出滑移率、車輪前進速度、線速度、前輪法向載荷、地面制動力、制動力矩的具體變化過程,把編輯好的M程序儲存在文件中,并命名為:ABS-test.m。具體程序如下:
clear all
r=0.253;u0=25;w0=u0/r;
M=1534;b=1.139;hg=1.236;L=2.4;
m=M*b/L/2;I=12.16;Tb=500;
ki=1500;kd=6000;smax=0.221;smin=0.185;
s0=0.2;u=u0;w=w0;fh=0.82;fg=0.61;
tm=7;dt=0.01;j=0;i=0;
for t=0:dt:tm;
if u>0
s=abs((u-r*w)/u);
if s>smax
Tb=abs(Tb-kd*dt);
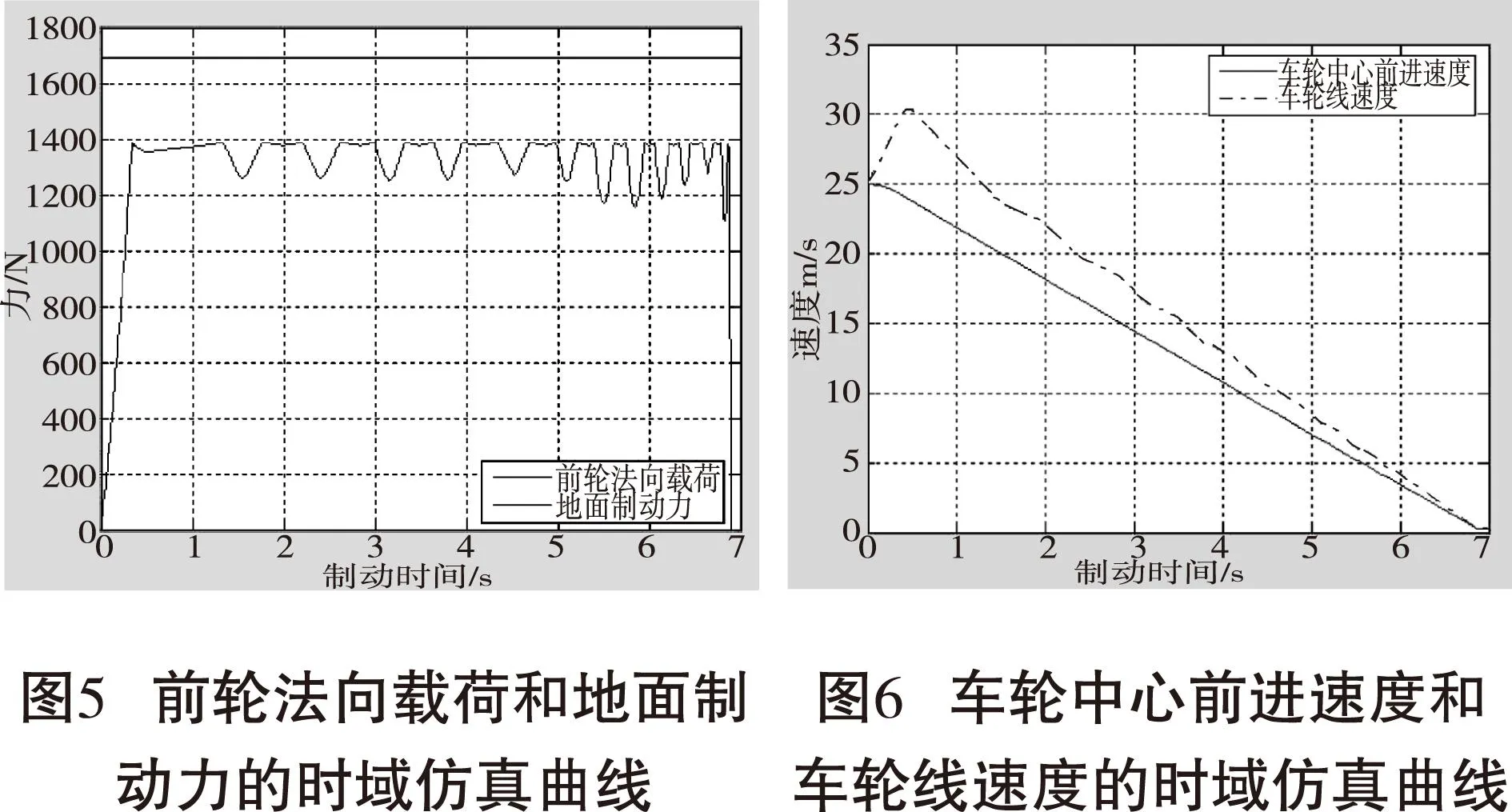
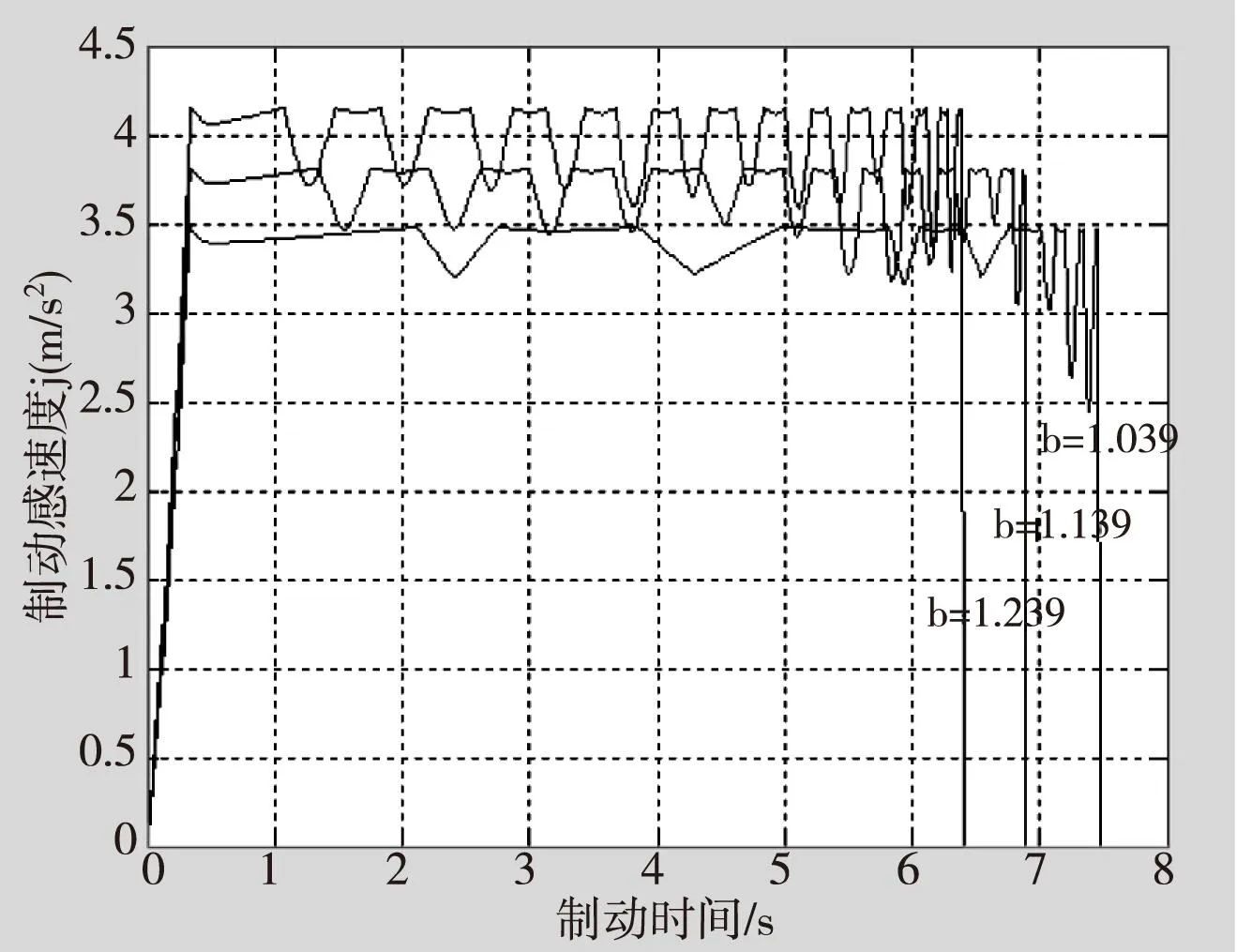
elseif s Tb=abs(Tb+ki*dt); else Tb=abs(Tb) end if s<0.2; f=fh/s0*s; elseif s>0.2&s<1 f=(fh-fg*s0)/(1-s0)-(fh-fg)/(1-s0)*s; end G1=m*9.8*b/L; Fxb=G1*f; end j=Fxb/m; if u<1/3.6; Fxb=0;j=0; end alfa=(Fxb*r-Tb)/I;u=u-j*dt; w=w-alfa*dt;uw=w*r;i=i+1; tb(:,i)=Tb;st(:,i)=s; ut(:,i)=u;uwt(:,i)=uw; G1t(:,i)=G1;Fxbt(:,i)=Fxb; jt(:,i)=j; end figure(1) t=0:dt:tm; plot(t,st); xlabel('制動時間/s');ylabel('滑移率'); Grid on figure(2) plot(t,ut,t,uwt,'-.'); xlabel('制動時間/s');ylabel('速度/m/s'); legend('車輪中心前進速度','車輪線速度'); Grid on figure(3) plot(t,G1t,t,Fxbt); xlabel('制動時間/s');ylabel('力/N'); legend('前輪法向載荷','地面制動力'); Grid on figure(4) plot(t,tb); xlabel('制動時間/s');ylabel('車輪制動力矩/N·m'); Grid on 最后在軟件MATLAB中運行程序ABS-test.m。可以得到圖3-圖6所示。 由圖3可以看出,汽車在制動過程中,滑移率經過多次振蕩,保持在預先設置好的0.18~0.22之間,使附著系數浮動在峰值附著系數左右,以保證車輪處于邊滾邊滑的狀態,達到最佳的制動效果。 由圖4可以看出,汽車在制動過程中,剛開始施加的制動力矩在550左右,隨著踏板的位置繼續增加,制動力急速達到1000左右,為了防止車輪抱死,ABS馬上開始工作,使制動力矩下降,反復工作,將制動力矩維持在110 附近,直至車停下來。 由圖5可以看出,汽車在制動過程中,地面制動力馬上達到1400 N左右,為了使車輪處于邊滾邊滑狀態,ABS開始執行,使其維持在1300 N~1400 N附近。由于假設前輪的載荷是個定值,波動的原因是由于路面的附著系數發生變化造成的,大約在接近7 s時,汽車的速度減為零。 由圖6可以看出,汽車在制動過程中,由于ABS的作用,車輪中心前進速度比較平穩的降下來,線速度隨之也逐漸變小,但是二者的下降曲線稍微有些偏差,這是由于在制動中有滑動現象發生。 4.2不同質心位置對ABS的影響 圖7 不同質心位置對制動減速度的影響 為了研究不同質心位置對ABS的影響,作者根據表1的參數,編寫M文件,首先編入各個參數,用for語句編輯后軸到質心的距離b=1.039 m、1.139 m、1.239 m,然后編入公式,最后保存并命名為:ABS-b-change.m。在MATLAB中的Command Window窗口運行便可以得到如圖7示。 由圖7可以看出,當質心的位置由后向前變大時,制動減速度隨著變大,制動時間明顯縮小,以確保汽車制動距離更小。 5總結 1)本文在MTALAB仿真中,通過某車型的具體參數,編輯具體的M文件,針對ABS的制動過程進行了各參數變化過程的仿真,得到了我們預期的結果。證明了汽車ABS仿真的可行性。 2)根據仿真結果,我們可以看出當車輛的質心位置由后向前微調時,可以縮短制動時間。我們還可以看出,曲線能夠具體反映出各參數的變化過程,今后在設計和校正ABS時,可以作為參考依據,減少不必要的實車試驗操作,提高開發效率。 參考文獻 [1]潘開廣.基于MATLAB的汽車防抱死制動系統仿真研究[J].農業裝備與車輛工程,2008(8):51-54 [2]余志生.汽車理論[M].北京:機械工業出版社.2012 [3]付爾第.汽車防抱死制動系統建模仿真及控制方法的研究[D].遼寧:遼寧工業大學,2014 [4]宋進源.汽車防抱制動系統建模與控制仿真研究[D].廣西.廣西大學,2007 [5]郭建亭,王少勇,呂魁超.基于MATLAB的汽車ABS仿真研究[J].汽車實用技術,2012(11):25-27 [6]王月明,張寶華. MATLAB基礎與應用教程[M].北京:北京大學出版社.2012 [7]安永東,劉穎,王洪珍. 基于MATLAB的汽車ABS制動動態模型的仿真研究[J].黑龍江工程學院學報,2006,20(4):47-49 [8]趙軒,曹紅,劉強. 基于MATLAB的汽車制動系統建模與仿真[J].北京汽車,2014(2):26-31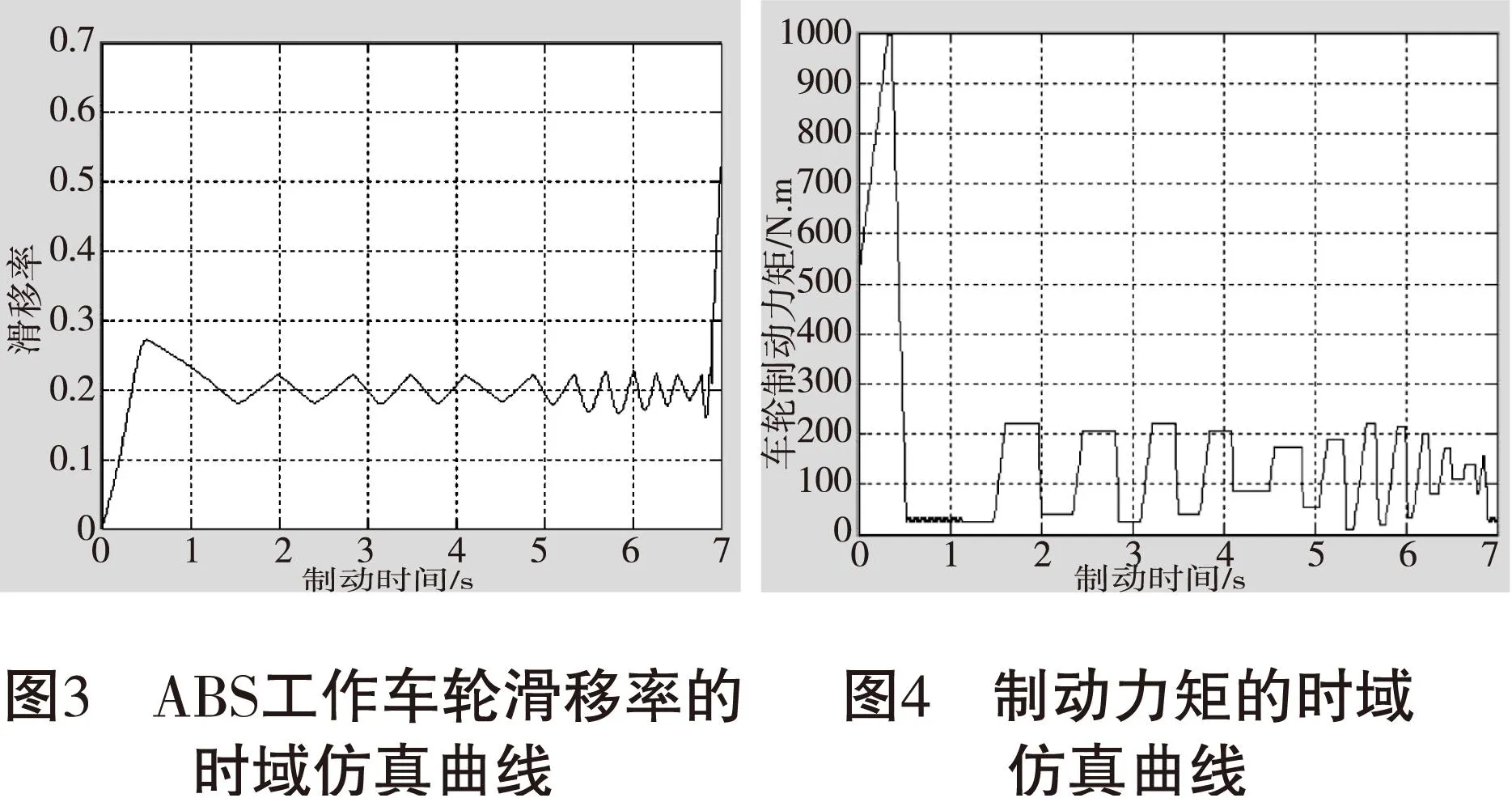

猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37