基于當前統計模型的交互融合跟蹤算法
2016-01-23 18:53:16練學輝喬大雷海軍駐南京地區雷達系統軍事代表室南京0003中國船舶重工集團公司第七二四研究所南京53
雷達與對抗 2015年2期
練學輝,閆 龍,喬大雷(.海軍駐南京地區雷達系統軍事代表室,南京0003; .中國船舶重工集團公司第七二四研究所,南京53)
?
基于當前統計模型的交互融合跟蹤算法
練學輝1,閆龍2,喬大雷2
(1.海軍駐南京地區雷達系統軍事代表室,南京210003; 2.中國船舶重工集團公司第七二四研究所,南京211153)
摘要:當前統計模型對于不同的機動類型需要采用不同的自相關時間常數,單一的當前統計模型濾波器不能夠完成對不同機動頻率目標的精確跟蹤,同時當前統計模型對非機動目標跟蹤效果并不理想。本文在交互多模型算法的基礎上融合常速模型及不同自相關時間常數的當前統計模型,實現對非機動目標及不同類型、不同程度機動目標的自適應跟蹤。
關鍵詞:當前統計模型;非機動目標;機動目標;交互多模型
0 引言
雷達目標跟蹤一直都是一個廣受關注的課題。隨著現代航空航天技術的迅速發展,各種飛行器的運動速度及機動性變得越來越高,對不同機動類型目標的可靠精確跟蹤是一個關鍵的難點。當前統計模型算法針對目標的機動特性作出先驗假設,對特定類型的機動具有較高的跟蹤精度。文獻[2]對當前統計模型算法進行了修正,對不同的機動特性建立一個當前統計模型,然后融合幾種模型的濾波結果,對不同機動類型均有較高的跟蹤精度,但對非機動目標的跟蹤誤差仍然較大。在此基礎上,本文將不同自相關時間常數的當前統計模型與常速模型融入到交互多模型算法中。仿真結果表明,本文算法不僅對不同類型機動目標達到較高的跟蹤精度,對非機動目標也能較穩定地跟蹤。
1 當前統計模型
當前統計模型算法采用瑞利分布來描述機動加速度的統計特征,假設的分布具有分布隨均值變化而變化、方差由均值決定的優點。該算法在估計目標狀態的同時還可辨識出機動加速度均值,從而實時地修正加速度分布,并通過方差反饋到下一時刻的濾波增益中,實現閉環自適應跟蹤[1]。
假設目標運動狀態方程為[2]

預測方程為

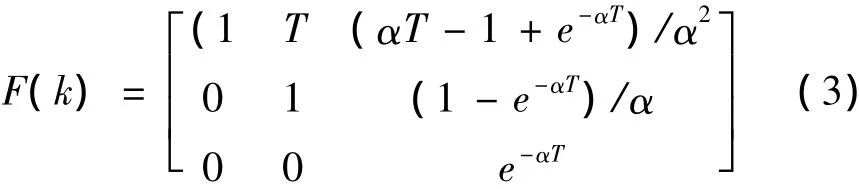
其中,F(k)為狀態轉移矩陣,即
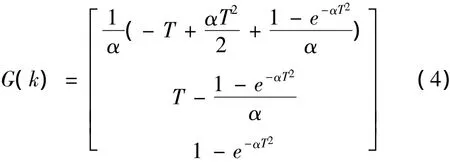
其中G(k)為輸入控制矩陣,即
其中V(k)是離散時間白噪聲序列,其協方差為
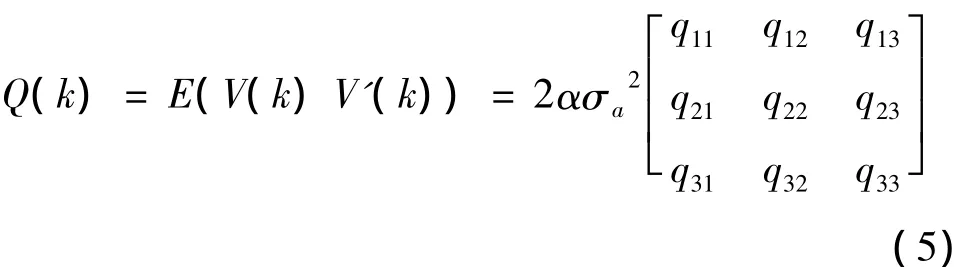
其中
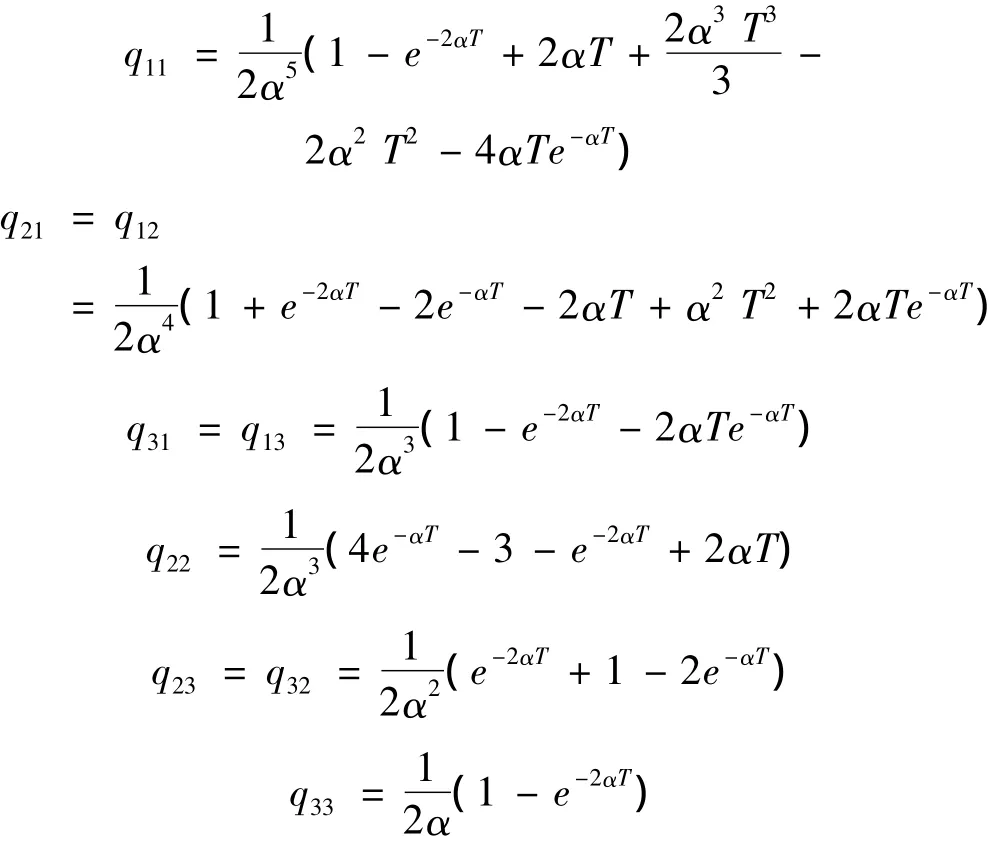
式中α為自相關時間常數,是機動時間常數的倒數,即機動頻率。通常對于慢速轉彎,1/α的取值是60 s,對于逃避機動是20 s,大氣擾動是1 s,α的值需要通過實際測量才能確定;σa2為機動加速度方差;珔a(k)為機動加速度均值,即


當前統計模型能夠很好地跟蹤機動目標。然而,不同的機動類型需要設置不同的先驗自相關時間常數與最大加速度,同時對于非機動目標的跟蹤有較大的誤差,這些都限制了當前統計模型的應用[1]。
2 當前模型的交互融合算法
2.1交互多模型
交互多模型算法在多模型算法的基礎上考慮多個模型的交互作用估計目標的狀態,是在廣義偽貝葉斯算法基礎上提出的一種具有Markov轉移概率的算法,包含了多個濾波器、1個模型概率估計器、1個交互作用器和1個估計混合器,通過交互作用跟蹤1個目標的運動軌跡。交互式作用器利用模型概率和模型轉移概率在Markov鏈下計算每一個濾波器的交互估計。每一個濾波器利用交互式估計和量測數據計算出一個新的估計和模型的可能性,結合該時刻的模型概率及模型轉移概率計算下一時刻的模型概率,總的濾波狀態通過新的狀態估計及相應的模型概率來計算[2]。
從模型i轉移到模型j的轉移概率為Ptij。
設X∧j(k-1|k-1)為k-1時刻的濾波器j的狀態估計,P∧j(k-1|k-1)為相應的狀態協方差陣,uk-1(j)為k-1時刻模型j的概率,其中,i,j =1,2…r。交互計算后r個濾波器在k時刻的輸入如下:
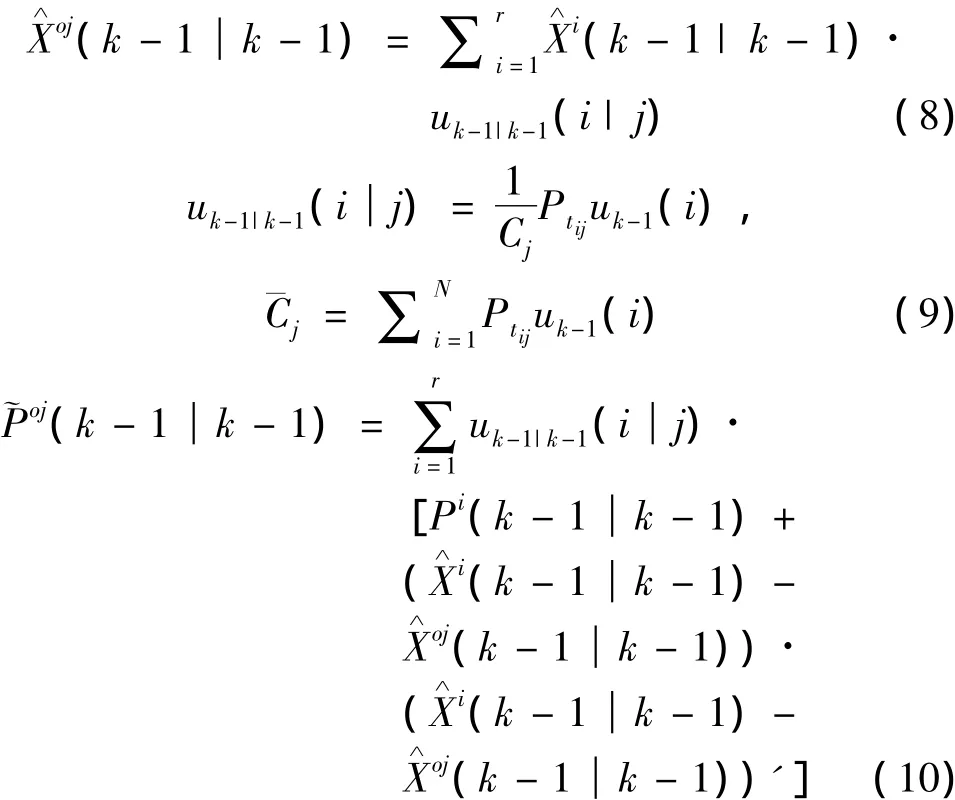
將∧Xoj(k-1│k-1)、P∧oj(k-1│k-1)作為k時刻第j個模型的輸入,得到相應的濾波輸出為X∧j(k│k)、P∧j(k│k)。根據模型j濾波殘差vjk及相應的協方差Sjk,計算模型j的可能性:

根據模型j的可能性,更新模型j的概率:

根據更新的模型概率可得到該時刻最終的濾波結果:

傳統的交互多模型算法中常用的模型有常速模型及常加速模型。傳統的交互多模型算法對于機動目標能夠自適應跟蹤,但在轉彎機動時明顯有較大的誤差。
2.2多模型交互融合算法
針對當前統計模型算法難以根據不同類型的機動自適應地選取自相關時間常數的問題,本文結合交互多模型算法,設置多個不同時間的自相關時間常數的當前統計模型,然后將這些模型作為交互多模型算法中的各個濾波器的濾波模型。同時,為了彌補當前統計模型對非機動目標跟蹤精度低的缺陷,本文將常速運動模型融合到所設計的當前統計模型交互融合算法中,從而自適應地跟蹤不同類型機動和非機動目標。
本文改進的當前統計模型交互融合算法包括常速非機動模型、轉彎機動的當前統計模型,逃辟機動的當前統計模型和大氣擾動的當前統計模型。理論上,該算法不僅對非機動目標能夠精確跟蹤,對不同類型不同程度的機動目標也能達到良好的跟蹤效果。
3 仿真分析
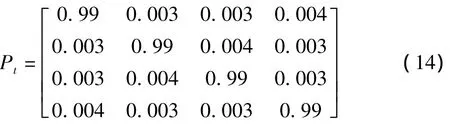
本文中采用前文提到的自相關時間常數的3種經驗取值,即α1=1/60,α2=1/20,α3=1,這樣就基本涵蓋了常見的機動方式,對3種當前模型取最大加速度amax=150 m/s2。公式(7)~(13)中r = 4。根據慣性規則,初始化轉移概率P 為
初始化濾波器時不能判斷目標的運動狀態,對各模型賦以相同的概率,則初始化模型概率為

目標運動狀態表示為

假設目標在空間極坐標內作S型躲避機動飛行,飛行速度200~300 m/s,S型機動大小為3 g,機動半徑2~3 km。仿真環境為雷達檢測周期為2 s,檢測概率為0.9,疊加距離噪聲為均方差為80 m的正態分布噪聲,疊加方位和仰角噪聲為均方差為0.3°的正態分布噪聲。分別運用當前統計模型算法、傳統交互多模型算法和本文的算法對目標進行跟蹤作100次蒙特卡洛仿真,結果如圖1~7,對各誤差取均值得到精度統計如表1。
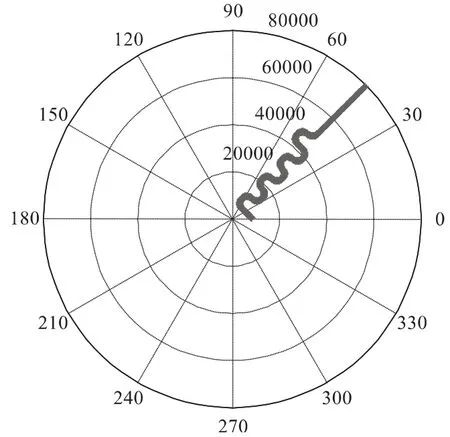
圖1 目標運動軌跡
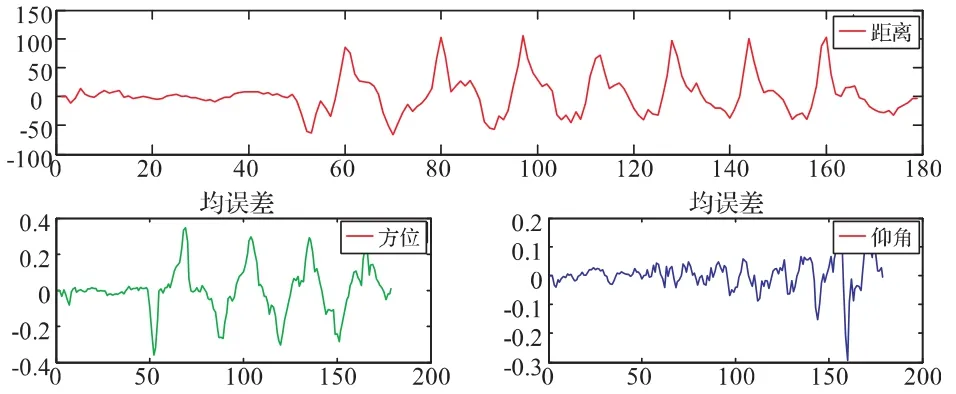
圖2 傳統交互多模型算法誤差均值

圖3 傳統交互多模型算法誤差均方值
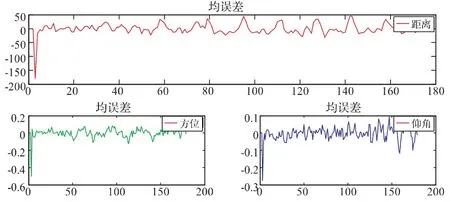
圖4 當前統計模型算法誤差均值
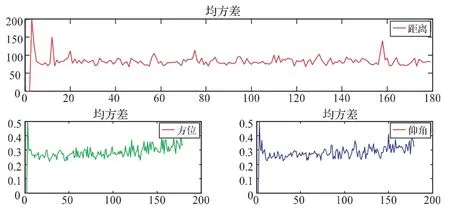
圖5 當前統計模型算法誤差均方值
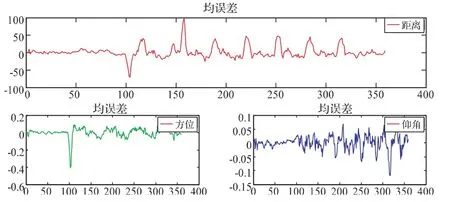
圖6 本文算法誤差均值
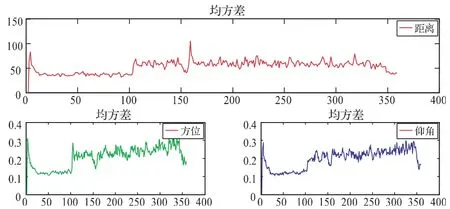
圖7 本文算法誤差均方值
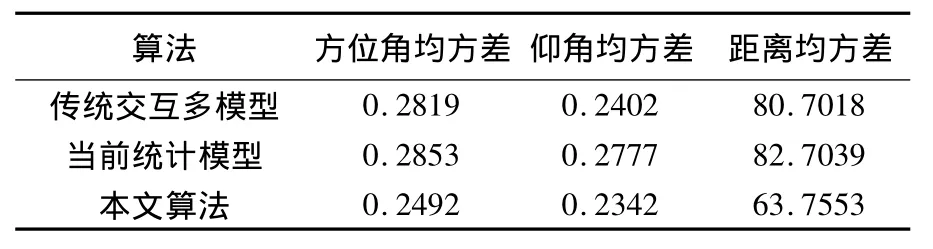
表1 各算法濾波精度統計
由仿真結果可以看出,傳統的交互多模型算法對于目標作S型躲避機動時會出現較大的誤差,這與其采用的模型有一定關系,常速模型和常加速模型對于目標轉彎躲避機動的跟蹤不能達到良好的效果。而從當前統計模型仿真結果可以看出,當前模型對于非機動的目標運動的跟蹤會產生漂移現象,這也是當前統計模型一個固有的缺陷。而本文算法對于運動目標的非機動部分及機動部分都能做到穩定的跟蹤,比原有算法的精度更高,而且具有更高的魯棒性。
4 結束語
本文改進的當前模型交互融合算法彌補了當前統計模型對非機動目標的跟蹤誤差大的固有缺陷,同時避免了對自相關時間常數的計算過程,能夠自適應地跟蹤不同類型不同程度的機動目標,具有一定的實際使用價值。然而,本文算法在跟蹤精度改進的同時也有一定的缺陷,就是算法復雜度較高,計算量較大,可能會影響到一定的實時性,這也是下一步工作要解決的重點問題。
參考文獻:
[1]陸晶瑩.高速高機動目標IMM跟蹤算法研究[D].南京:南京理工大學,2010.
[2]何友,等.雷達數據處理及應用[M].北京:電子工業出版社,2006.1.
[3]周朝暉,嵇成新.多種濾波器方案對機動目標跟蹤自適應比較[J].情報指揮控制系統與仿真技術,2003(10):24-36.
[4]陳亮.機動目標跟蹤關鍵技術研究[D].哈爾濱工程大學博士論文,2012.
A combined interactive tracking algorithm based on current statistical model
LIAN Xue-hui1,YAN Long2,QIAO Da-lei2
(1.Military Representatives Office of Radar System of the PLA Navy in Nanjing,Nanjing 210003; 2.No.724 Research Institute of CSIC,Nanjing 211153)
Abstract:The current statistical model adopts different autocorrelation time constants for different maneuvering targets,and the single filter is not capable of tracking maneuvering targets with different frequencies accurately.At the same time,the tracking effect is also not satisfactory when it comes to tracking non-maneuvering targets.Based on the interactive multi-model algorithm,the current statistical model with different autocorrelation time constants is combined with the constant speed model to realize the adaptive tracking of non-maneuvering targets and diverse maneuvering targets.Keywords: current statistical model; non-maneuvering target; maneuvering target; interactive multi-model
作者簡介:練學輝(1965-),男,高級工程師,研究方向:雷達總體技術;閆龍(1988-),男,助理工程師,碩士,研究方向:雷達數據處理;喬大雷(1980-),男,工程師,碩士,研究方向:雷達數據處理。
收稿日期:2015-03-12
文章編號:1009-0401(2015)02-0029-04
文獻標志碼:A
中圖分類號:TN959.6