雙軸驅動混合動力車輛能量管理策略
2016-01-25 07:56:19江冬冬李道飛俞小莉
浙江大學學報(工學版) 2016年12期
江冬冬, 李道飛, 俞小莉
(浙江大學 動力機械及車輛工程研究所,浙江 杭州 310027)
?
雙軸驅動混合動力車輛能量管理策略
江冬冬, 李道飛, 俞小莉
(浙江大學 動力機械及車輛工程研究所,浙江 杭州 310027)
建立雙軸驅動混合動力車輛(DDHEV)效率分析模型,并構建杭州市循環工況.根據動態規劃控制策略的仿真結果獲得新規則控制策略,評估新規則控制策略的節油效果.結果表明:相比于傳統的規則控制策略,新規則控制策略可以使車輛燃油經濟性在擁堵工況下提高35.5%,在順暢工況下提高24.9%,在高架工況下提高4.8%.為提高新規則控制策略在不同工況下的適應性,采用學習向量量化神經網絡識別實際運行工況,調整相應的控制參數,并評估節油效果.結果表明:在實際運行工況下,相比于采用單個新規則控制策略,采用工況識別來調整新規則控制策略參數可使燃油經濟性提高28.2%以上.所提出的模型滿足了雙軸驅動混合動力車輛的實際應用需求,提高了車輛的燃油經濟性.
雙軸驅動混合動力車輛(DDHEV);工況構建;能量管理;規則提取;工況識別
雙軸驅動混合動力車輛(dual drive hybridelectric vehicles,DDHEV)是四輪驅動技術與混合動力技術相結合的產物,兼具四驅車輛的動力性、通過性、操縱性和混合動力電動車輛的經濟性[1].同時,DDHEV改造較為容易,不需要完全重新設計整車結構,可為汽車公司節省大量的研發時間和成本.目前,國內外汽車公司紛紛推出了各自的DDHEV.
我國城市間的道路狀況差異較大,因此城市間的車輛循環工況特征也有較大區別[2].循環工況對能量管理策略的制定有很大影響,大量文獻對國內不同城市循環工況的構建進行了研究[3-6],但是對于杭州市循環工況構建的研究很少.目前,針對DDHEV的研究主要包括換擋策略、模式切換平順性[7-8]和能量管理控制策略研究[9-11]等.其中,DDHEV能量管理策略主要包括動態規劃控制策略(dynamic programming, DP)、等效燃油消耗最小控制策略(equivalent consumption minimization strategy, ECMS)和基于規則的控制策略(rule-based, RB)等.混合動力車輛在實際應用中的控制策略目前只有規則控制策略,當前文獻針對DDHEV采用規則控制策略時并沒有對其進行優化,也沒有考慮運行工況的影響.
本文針對雙軸驅動混合動力車輛的能量管理策略進行研究.通過構建杭州市循環工況,并采用動態規劃控制策略對其進行仿真計算;根據其計算結果提取出新規則控制策略,進而采用學習向量量化神經網絡(learning vector quantization neural network,LVQNN)識別車輛當前的運行工況;根據識別結果實時調整新規則控制策略的參數,以獲得更好的燃油經濟性.
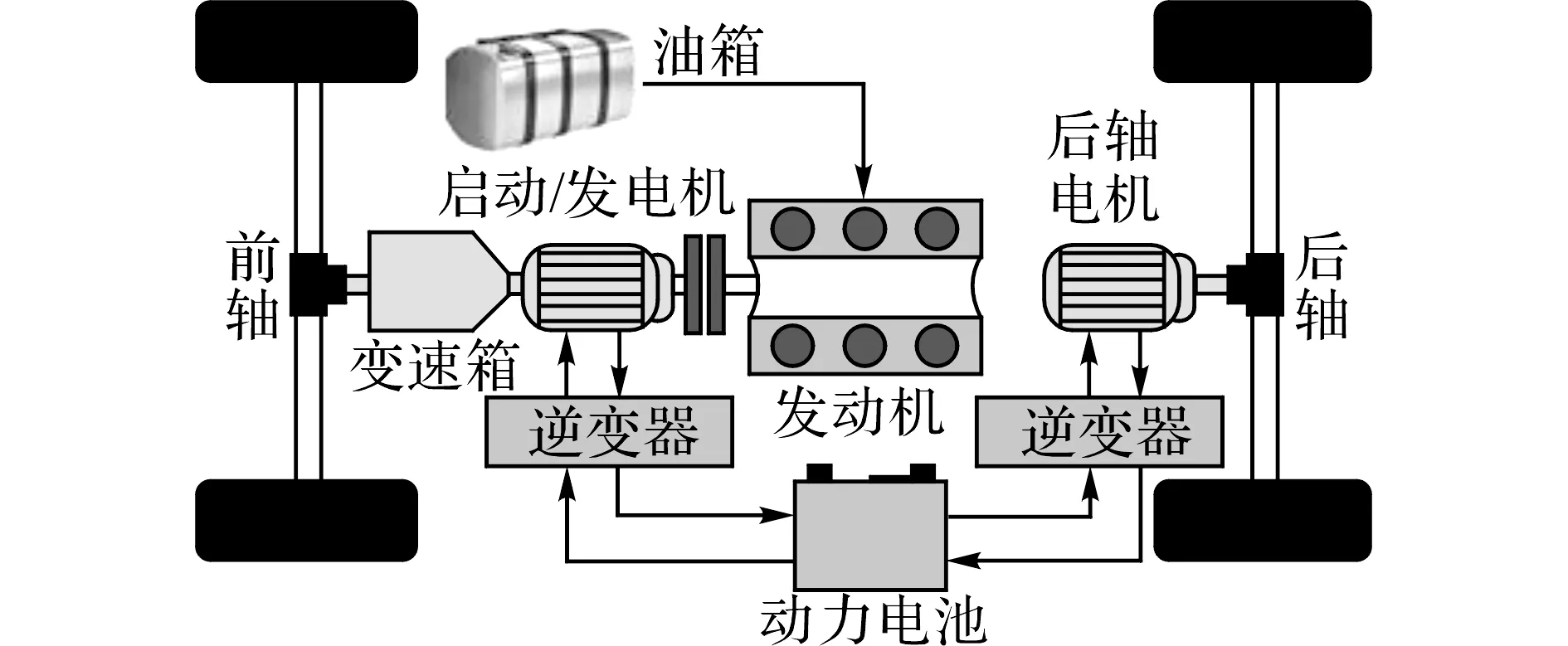
圖1 雙軸驅動混合動力車輛結構示意圖Fig.1 Structure diagram of dual drive hybrid electric vehicles (DDHEV)
1 模型構建
DDHEV的結構如圖1所示,以內燃機車輛(internal combustion engine vehicles, ICEV)為基礎,只需要在發動機和變速箱之間增加啟動/發電機(integrated starter/generator, ISG),在后軸處增加驅動電機(rear-axle motor, RAM)以及動力電池等相關部件即可.DDHEV的主要參數如表1所示,由于其部件比ICEV更多,假設DDHEV比ICEV重300 kg,其余相同部件的參數不變.
表1 雙軸驅動混合動力車輛主要參數
Tab.1 Main parameters of dual drive hybrid electric vehicles (DDHEV)
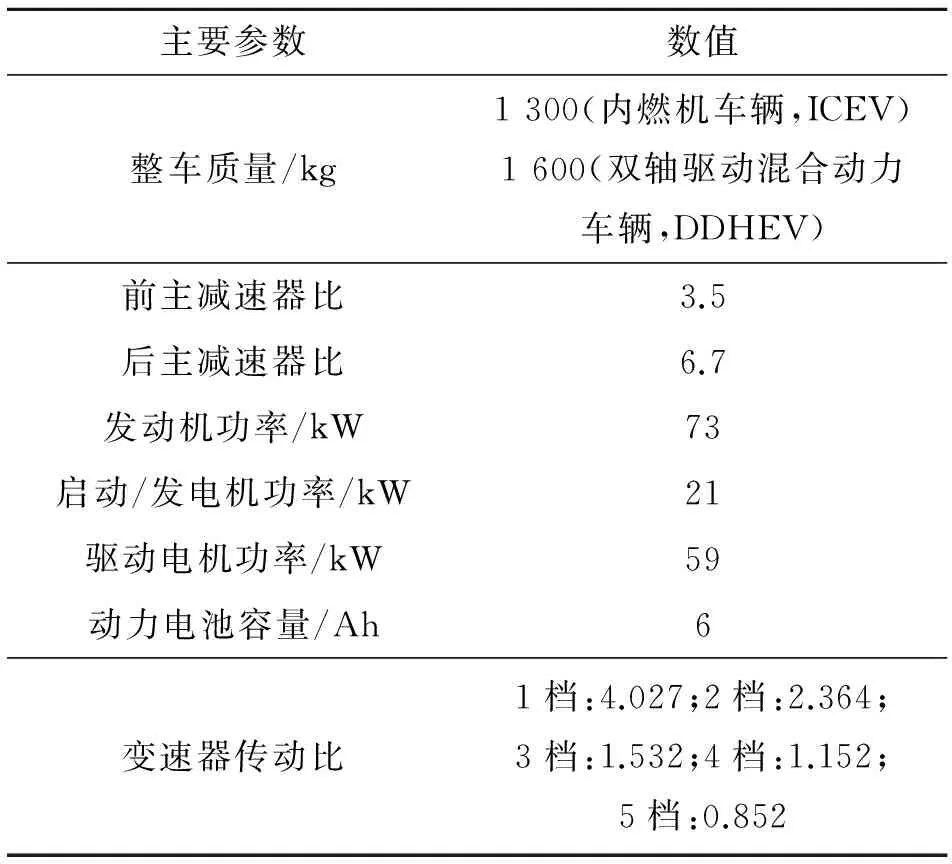
主要參數數值整車質量/kg1300(內燃機車輛,ICEV)1600(雙軸驅動混合動力車輛,DDHEV)前主減速器比3.5后主減速器比6.7發動機功率/kW73啟動/發電機功率/kW21驅動電機功率/kW59動力電池容量/Ah6變速器傳動比1檔:4.027;2檔:2.364;3檔:1.532;4檔:1.152;5檔:0.852
DDHEV模型基于Advisor軟件中的Parallel SA模型修改得到,如圖2所示.在原模型的基礎上添加后輪模塊、后主減速器模塊和后軸驅動電機模塊,如圖中虛線框①所示.此外,由于原模型為前軸驅動,需要對其牽引力控制模塊及前、后軸之間的轉矩分配模塊進行修改,如圖中虛線框②所示,具體修改過程見文獻[12].
2 杭州市循環工況構建
車輛循環工況的基本開發流程如下:試驗規劃、數據采集、數據分析與處理和工況構建.本文試驗采用自主行駛法,即對象車輛駕駛員自由駕駛車輛.該方法在時間和道路方面沒有規定,隨意性強.為了反映車輛在不同時間段的運行特征,通過車輛的控制器局域網絡(controller area network, CAN)記錄一個月內的運行數據.對于數據分析與處理及工況構建的具體過程詳見文獻[3-6].
由上述工況構建流程可得到如圖4所示的3類杭州市循環工況:擁堵工況、順暢工況、高架工況.圖中,t為時間,v為車輛運行速度,可以看出不同工況下的運行速度曲線存在明顯區別.如圖3(a)所示的擁堵工況,最高車速小于40 km/h,停車等待時間較長;如圖3(b)所示的順暢工況,車速大部分在30~60 km/h范圍內,停車等待時間很短;如圖3(c)所示的高架工況,車速大部分在60~90 km/h范圍內,停車等待時間很短.
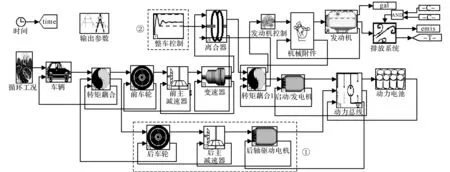
圖2 雙軸驅動混合動力車輛模型示意圖Fig.2 Schematic diagram of DDHEV model
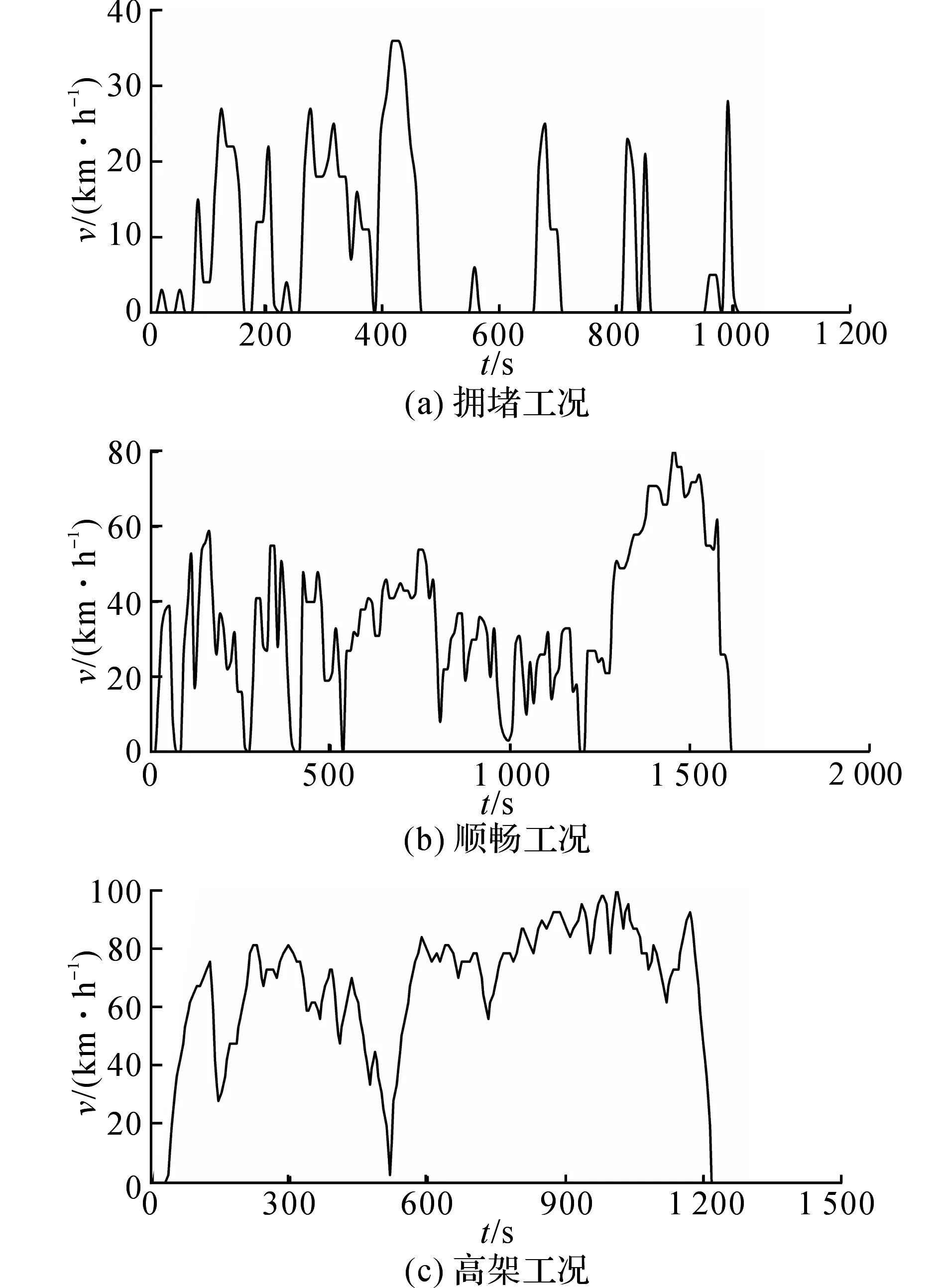
圖3 杭州市(擁堵、順暢、高架)循環工況圖Fig.3 Hangzhou driving cycle diagrams of congestion, smooth and elevated highway
3 控制策略開發
3.1 傳統的規則控制策略
傳統的規則控制策略(traditional rule-based, TRB)設定了一系列的門限值,在維持動力電池荷電狀態(state of charge, SOC)處于允許范圍內的前提下,通過車輛需求功率、車速等因素根據設定的規則對車輛的運行模式進行切換,并對各部件進行動力分配[13-14].
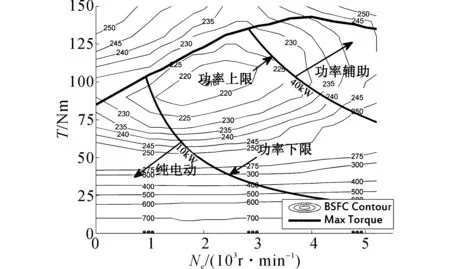
圖4 傳統的規則控制策略下發動機運行區域示意圖Fig.4 Schematic diagram of engine operation area with traditional rule-based (TRB) control strategy
根據發動機的有效燃油消耗率圖,通過2條等功率線(功率上限Pup,功率下限Pdn)將發動機運行區域限制在其內部,劃分結果如圖4所示.其中,Ne為發動機轉速,T為發動機轉矩.
為DDHEV設定的規則如下.
1) 純電動驅動:Pd
2) 發動機單獨驅動:
Pdn
Peng=Pd.
3) 聯合驅動:
Pd>Pup,S>Sl,
Peng=Pup,Peng+PRAM+PISG=Pd.
4) 行車充電:
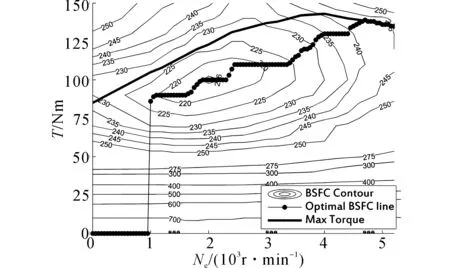
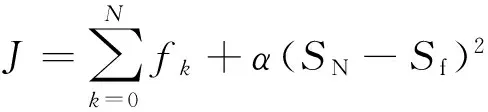
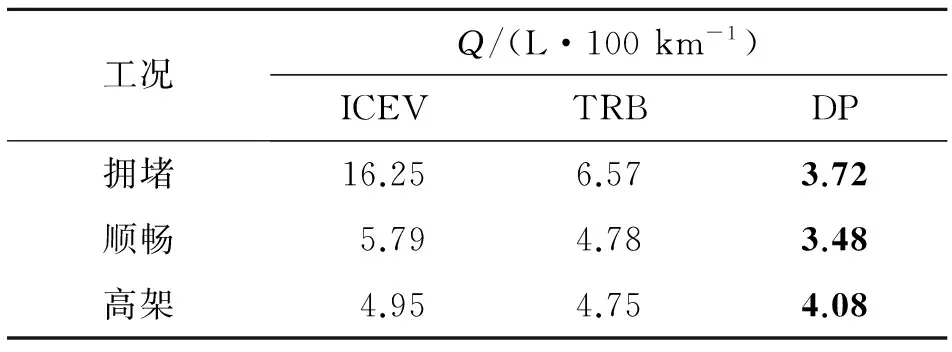
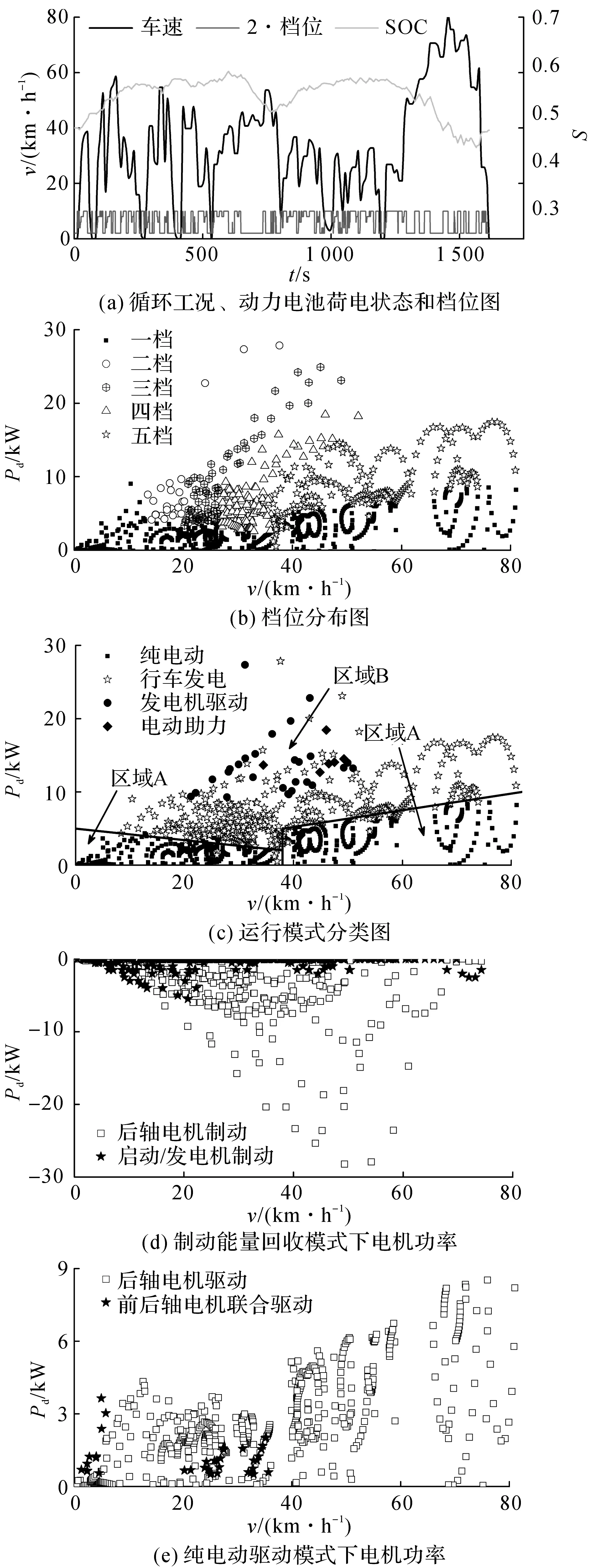
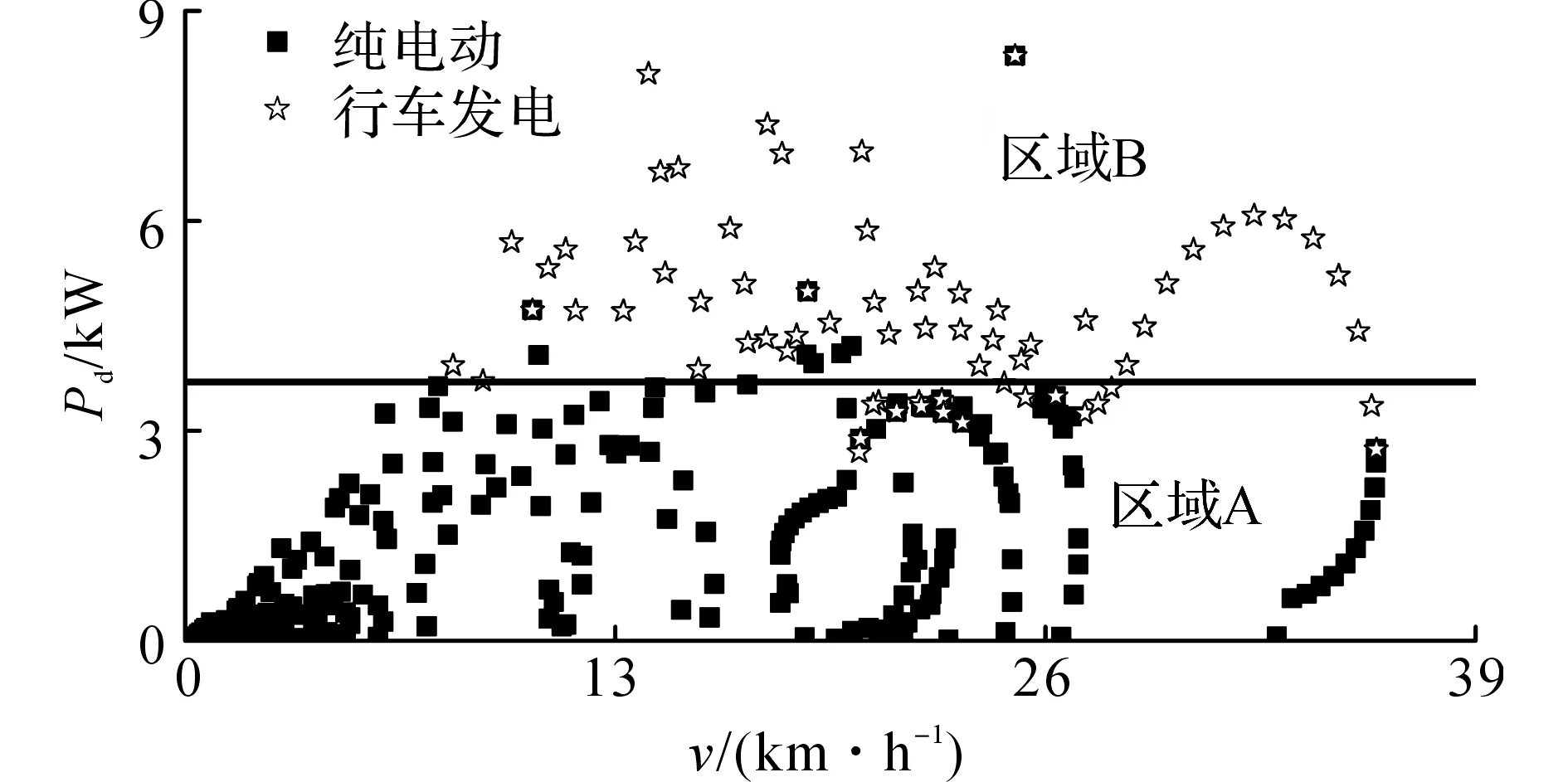
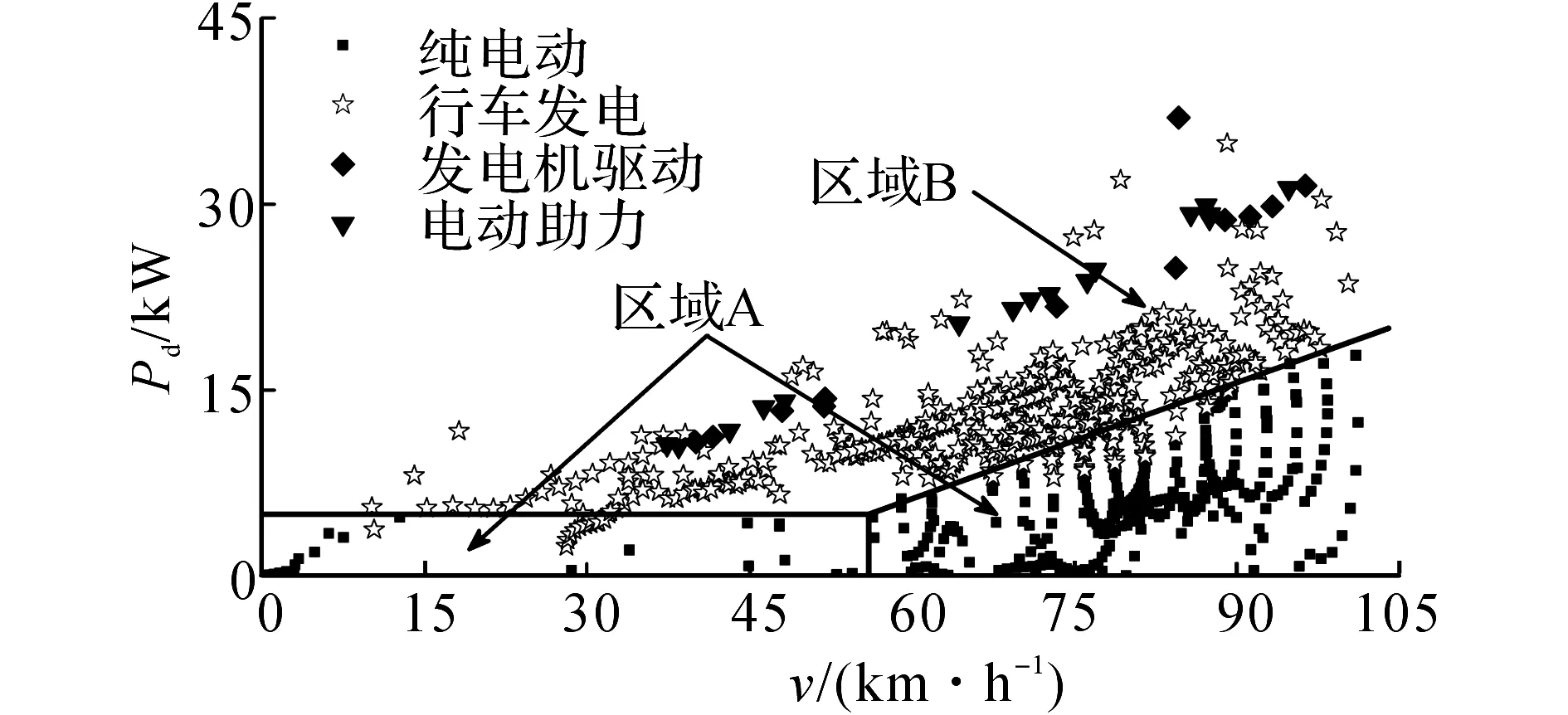
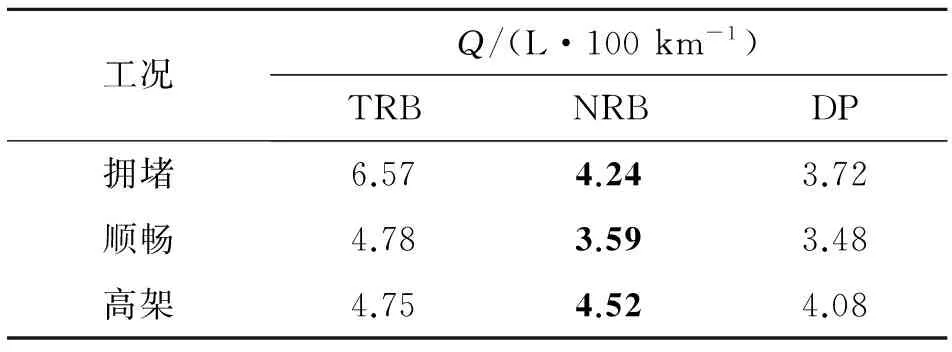
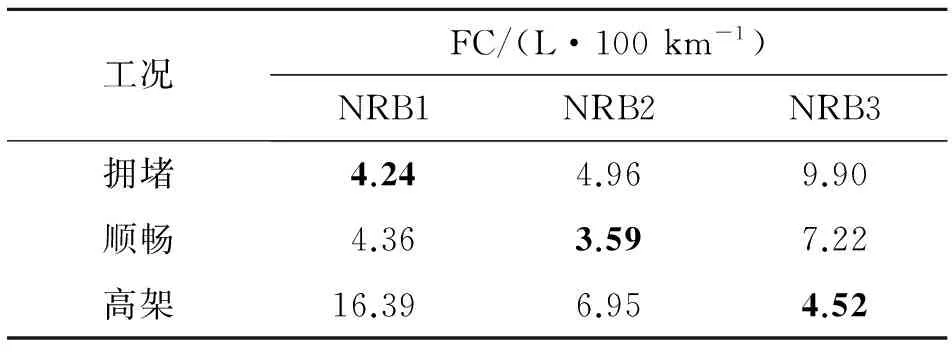
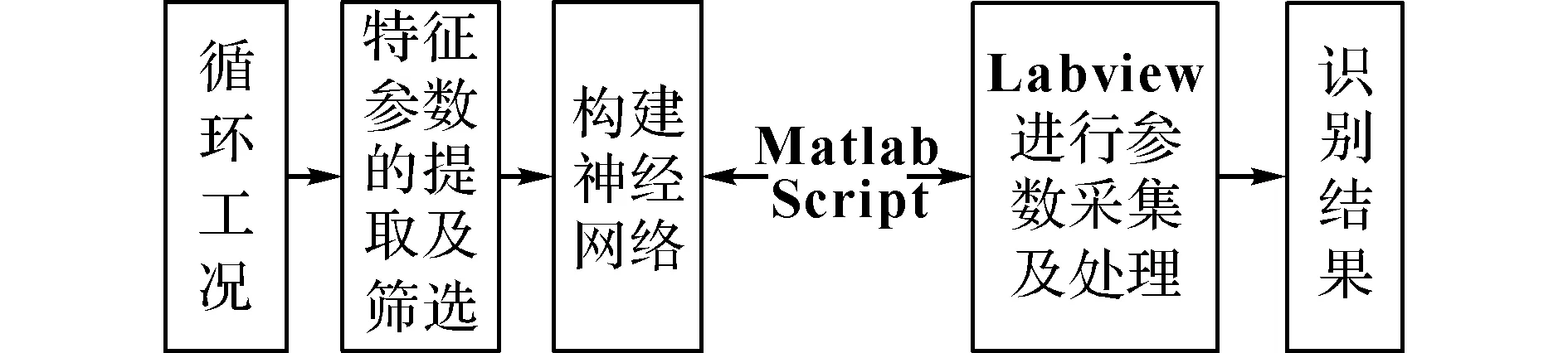
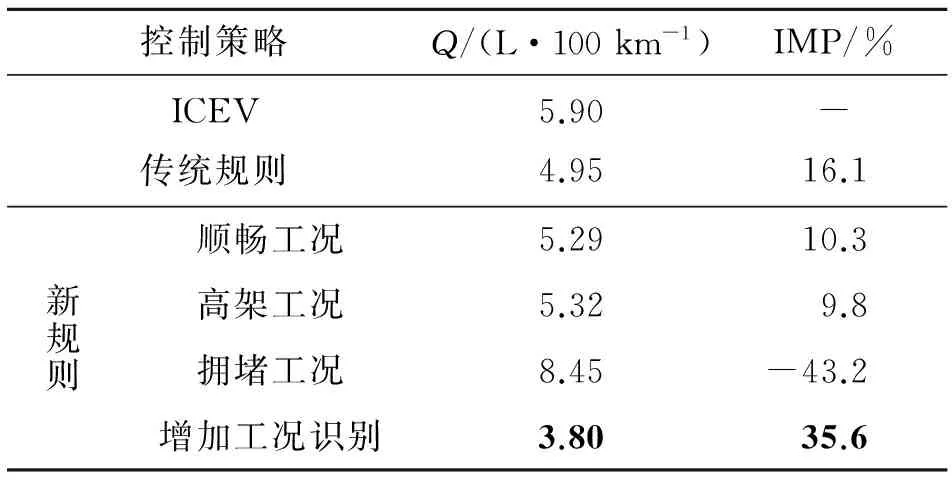
S<(Sl+Sh)/2,Pd Peng=Pup,PISG=Peng-Pd. 5) 制動控制:Pd<0,則 PRAM=max (-max (PRAM),Pd), PISG=max (-max (PISG),Pd-PRAM), PMB=Pd-PRAM-PISG.式中:Pd和PMB分別為需求功率和制動功率,Peng、PRAM和PISG分別為發動機、后軸電機和啟動/發電機的輸出功率,S為動力電池荷電狀態,Sh、Sl分別為動力電池荷電狀態允許的上下限,-max (PRAM)、-max (PISG)分別為RAM和ISG的最大制動功率. 3.2 動態規劃控制策略 動態規劃控制策略的中心思想是將多階段決策問題轉化為一系列的單階段決策問題.在每個階段都做出決策,根據現階段所作的決策可獲得現階段的效益,也可獲得下一個階段的初始狀態.在每個階段的決策選定之后,就可得到一個決策序列,最后通過正向尋優的方法找到最優的決策序列,從而獲得最優的效益總和. DDHEV和豐田普銳斯(Prius)車輛,由于結構不同,在采用動態規劃進行仿真時存在一定的區別. 1) 在進行動態規劃計算時,Prius和DDHEV的決策變量和狀態變量如表2所示.共同之處是都有3個動力部件,需要將其中2個動力部件的輸出轉矩作為控制變量,從而確定另一個部件的輸出轉矩,并以動力電池荷電狀態作為狀態變量.不同之處如下:DDHEV不存在行星齒輪結構,不能實現電無極變速功能,其動力部件的轉速、轉矩與變速器檔位相關,在控制變量中需要添加變速器檔位作為控制參數;其發動機轉速與車速直接相關,不需要將發動機轉速作為狀態變量,只需要將動力電池荷電狀態作為狀態變量.動態規劃的計算量隨決策變量和狀態變量的增加呈指數增長,為了減少計算量,同時簡化規則提取,規定發動機沿著比油耗最小的曲線運行,如圖5所示.發動機轉矩可由發動機轉速和比油耗最小曲線獲得,最終決策變量可簡化為后軸電機轉矩和變速器檔位,如表2所示. 表2 普銳斯和DDHEV采用動態規劃控制策略時的決策變量和狀態變量對比 Tab.2 Decision and state variables comparison of dynamic programming control strategy based on Prius and DDHEV 對象車輛決策變量狀態變量普銳斯發動機轉矩電動機轉矩發動機轉速、動力電池荷電狀態DDHEV發動機轉矩后軸電機轉矩變速器檔位動力電池荷電狀態DDHEV(參數簡化)后軸電機轉矩變速器檔位動力電池荷電狀態 圖5 DDHEV發動機比油耗最小曲線圖Fig.5 Optimal brake specific fuel consumption line of DDHEV engine 2) 由于DDHEV的后軸電機轉速范圍不能夠滿足車輛高速運行,在低速運行時是3個動力部件之間進行動力分配,而高速時只有前軸2個動力部件進行動力分配. 3) Prius的2個電機都可根據運行工況的需求進行發電或者驅動.DDHEV的后軸電機和前軸并不直接相連,通過前軸驅動帶動后軸電機進行發電,整體效率較低.因此在驅動時,設定只有啟動/發電機可以發電,后軸電機不可發電,只有在制動能量回收模式下時后軸電機才進行發電. DDHEV采用動態規劃求解的步驟[15-17]如下. 1) 階段的劃分:在研究車輛的燃油經濟性時,高于1 Hz的車輛瞬態特性可以忽略不計,以步長Δt=1 s將整個循環工況時間段分割為N個階段. 2) 狀態變量及決策變量:狀態變量要求能夠反映出整個循環過程中車輛的變化特性,并且具有無后效性.如表2所示,DDHEV的狀態變量為動力電池荷電狀態,簡化后的決策變量為后軸電機轉矩和變速器檔位. 3) 狀態轉移方程為 (1) 式中:x為狀態變量,k為仿真的階段,Δt為仿真步長,PRAM、PISG分別為后軸電機和啟動/發電機的輸出功率,Wb為動力電池的總能量. 4) 目標函數:優化目標為在給定的循環工況下,以總油耗最小為前提,并對動力電池荷電狀態進行約束,求解最優的決策變量u(k),因此動態規劃的目標函數中包含了2個子函數,可表示為 (2) 式中:等號右側第一項為燃油消耗目標子函數,第二項為動力電池荷電狀態的偏差懲罰函數,Sf為循環工況結束時的動力電池荷電狀態值,SN為目標動力電池荷電狀態值,α為加權因子. 在求解極小值時,對動力電池荷電狀態,發動機、啟動/發電機、后軸電機的轉矩和轉速以及變速器檔位進行約束,以保證所有運行參數的變化處于允許范圍內. 動態規劃求解過程是基于Bellman優化原理[15],主要分為以下4步: 1) 在給定循環工況下,計算每個時間階段整車的功率; 2) 在滿足整車需求功率的前提下,計算采用不同的功率分配方式時的油耗; 3) 從工況終端時間點開始,逆向推導,完成整個循環工況下整車油耗最小值的計算,并標記每個時間階段下獲得最小值的控制量; 4) 從工況始端時間點開始,正向求解,獲得整個循環工況下的最優控制策略. 3.3 仿真結果分析 針對杭州市3個循環工況,分別采用傳統的規則控制策略和動態規劃控制策略對DDHEV進行仿真計算,并以ICEV作為對比,結果如表3所示.其中Q指車輛百公里油耗,ICEV指仿真對像是傳統內燃機車輛,TRB指對DAHEV采用傳統的規則控制策略,DP指對DAHEV采用動態規劃控制策略.為修正傳統的規則控制策略在仿真始末因動力電池荷電狀態不同而引起的整車燃油消耗量差異,方便對比各個控制策略的油耗,采用線性矯正法對燃油消耗量結果進行修正. 由表3可知,雖然ICEV重量較輕,但在擁堵工況下發動機長時間運行于怠速及低速區域,油耗偏高,而在順暢工況及高架工況下效率有所提升,油耗 表3 擁堵、順暢和高架工況采用傳統規則控制和動態規劃控制策略的百公里油耗 Tab.3 Fuel consumption per hundred kilometers of using TRB and dynamic programming control strategy under congestion, smooth and elevated highway driving cycles 工況Q/(L·100km-1)ICEVTRBDP擁堵16.256.573.72順暢5.794.783.48高架4.954.754.08 下降明顯.相對于ICEV,盡管DDHEV的重量增加了300 kg,采用傳統的規則控制策略可使車輛燃油經濟性在擁堵工況、順暢工況以及高架工況下分別提高59.6%、17.4%和4.0%.采用動態規劃控制策略時的燃油經濟性比采用傳統的規則控制策略在擁堵工況、順暢工況和高架工況下分別提高43.4%、27.2%和14.1%. 3.4 新規則控制策略的提取 由上述分析可知,相比于傳統的規則控制策略,采用動態規劃控制策略進一步提高了燃油經濟性,但其計算量大,不適用于車輛實際運行工況.因此,基于動態規劃控制策略的仿真結果,提取新的規則控制策略(new rule-based, NRB). 以順暢工況為例,采用動態規劃控制策略獲得如圖6(a)中的仿真結果.將仿真結果由時間-車速對應轉化為車速-需求功率,得到如圖6(b)、6(c)、6(d)和6(e)所示的檔位分布圖、運行模式分類圖、制動模式下電機功率圖和純電動模式下電機功率圖. 如圖6(b)所示,隨著車速、需求功率的變化,各個檔位分布在有著明顯界限的不同區域內,由此獲得順暢工況下的換擋策略.如圖6(c)所示,順暢工況下主要有4種運行模式,純電動、行車發電、發動機驅動和電動輔助,主要的運行模式為電動模式和行車發電模式,發動機單獨驅動模式和電動助力模式出現的較少,因此根據各個模式的疏密程度將其分割成A、B 兩個區域.其中A區為純電動模式,車輛需求功率較小,發動機運行效率較低,而此時電機的效率較高,因此應由電機單獨驅動車輛,提高燃油經濟性;B區包括了除純電動模式之外的發動機單獨驅動、行車發電和輔助驅動3種模式,此時發動機啟動,沿著比油耗最小曲線運行,啟動/發電機則補充不足的功率或者吸收多余的功率. 圖6 順暢工況下動態規劃仿真結果(檔位分布、運行模式分類、純電動和制動能量回收模式下2個電機的功率分配)Fig.6 Dynamic programming simulation results of smooth driving cycle (gear distribution, working pattern classification, power allocationbetween two motors under electric mode and brake energy regeneration mode) 如圖6(d)所示,處于制動能量回收模式時主要由后軸電機回收制動能量,因此將此模式下的規則設置為后軸電機優先回收制動能量,啟動/發電機回收剩余的制動能量.如圖6(d)所示,當處于純電動模式時,動力絕大部分由后軸電機提供,因此將此模式下的規則設置為由后軸電機優先提供驅動力,啟動/發電機補充不足部分.對于DDHEV來說,后軸電機主要用于在純電動模式下提供驅動力及在制動能量回收模式下回收制動能量;而ISG電機主要用于在制動能量回收模式下輔助進行制動能量回收及在純電動模式下輔助驅動,并在輔助驅動和行車發電模式下調整發動機運行狀態,使其沿著于比油耗最小曲線運行. 如圖7、6(c)和8所示分別為擁堵工況、順暢工況及高架工況下的模式劃分圖,雖然在不同工況下劃分的區域不同,但都可以表示成以下規則控制. 1) 若(Pd,V)∈區域A,PRAM=Pd; 2) 若(Pd,V)∈區域B,Peng=Popt,PISG=Pd-Peng; 3) 若Pd<0,PRAM+PISG=Pd.其中,Pd為需求功率,Peng、PRAM和PISG分別為發動機、后軸電機和啟動/發電機的輸出功率,Popt為發動機轉速根據發動機比油耗最小曲線對應的輸出功率. 上述3個工況下提取得到的新規則控制策略分別為擁堵工況的新規則控制策略、順暢工況的新規則控制策略以及高架工況的新規則控制策略.對這3個循環工況分別采用傳統規則控制策略、新規則控制策略及動態規劃控制策略進行仿真計算,結果如表4所示.相比于動態規劃控制策略,采用工況對應的新規則控制策略時油耗略有增加,但相比于傳統的規則控制策略,其燃油經濟性在擁堵工況、順暢工況和高架工況下分別提高了35.5%、24.9%和4.8%,說明了新規則控制策略的有效性. 圖7 基于動態規劃的擁堵工況運行模式分類圖Fig.7 Work pattern classification diagram of congestion driving cycle based on dynamic programming 圖8 基于動態規劃的高架工況運行模式劃分圖Fig.8 Work pattern classification diagram of elevated road driving cycle based on dynamic programming 表4 擁堵、順暢和高架工況采用傳統規則、新規則和動態規劃控制策略的百公里油耗值 Tab.4 Fuel consumptions per hundred kilometers of using TRB, new rule-based and dynamic programming control strategy under congestion, smooth and elevated highway driving cycles 工況Q/(L·100km-1)TRBNRBDP擁堵6.574.243.72順暢4.783.593.48高架4.754.524.08 由于3個新規則控制策略的區域劃分及換檔策略不同,在相同需求功率下分配到各驅動系統的功率并不相同,導致車輛燃油經濟性不同.對擁堵工況、順暢工況和高架工況分別采用3個新規則控制策略進行仿真,結果如表5所示.其中NRB1為擁堵工況的新規則控制策略,NRB2為順暢工況的新規則控制策略,NRB3為高架工況的新規則控制策略.單個新規則控制策略只能在對應的循環工況下獲得最好的燃油經濟性,不能在所有工況下都獲得最佳的燃油經濟性.為了使車輛能在實際工況中獲得較好的燃油經濟性,需要對實際工況進行識別,并根據識別結果對不同工況調整控制參數. 表5 擁堵、順暢和高架工況采用新規則控制策略的百公里油耗 Tab.5 Fuel consumptions per hundred kilometers of using new rule-based (NRB) control strategy under congestion, smooth and elevated highway driving cycles 工況FC/(L·100km-1)NRB1NRB2NRB3擁堵4.244.969.90順暢4.363.597.22高架16.396.954.52 學習向量量化神經網絡屬于前向有監督神經網絡類型,在模式識別和優化領域有著廣泛的應用[18-20].本文采用基于學習向量量化神經網絡的工況識別方法對工況進行識別,主要流程如圖9所示,根據3個循環工況的數據,將行駛工況以每180 s分為多個小片段,每個片段之間可以疊加,然后對每個片段進行特征參數計算.各個特征參數對識別的影響程度各不相同,部分參數之間功能重疊,經過篩選得到的循環工況特征參數為平均車速、車速標準差、平均減速度、加速度標準差、每100 s內速度變化大于2 km/h的平均次數、每100 s內速度變化大于10 km/h的平均次數、減速度大于-0.96 m/s2且小于-0.6 m/s2的時間占減速時間的百分比和加速度大于1.03 m/s2的時間占加速度時間的百分比.在Matlab軟件中構建學習向量量化神經網絡的命令是net=newlvq(P,K,C,R,F).其中P為不同工況下的特征參數構成的N×8維矩陣,其中N為3個工況的總時間長度;K為隱含層神經元的數目,設置為40;C為第二層的權值中所列屬類別的百分比,其中擁堵工況、順暢工況和高架工況所占比例分別為28.93%、30.53%和40.55%;R為學習速率,設定為默認值0.01;F為學習函數,設定為默認值learnlv1.為了驗證所獲得的神經網絡模型的準確性,根據循環工況片段數據提取出特征參數,將不同工況下的特征參數導入神經網絡模型中進行識別,可得各個工況的識別正確率均為100%,精度滿足使用要求. 圖9 循環工況采用學習向量量化神經網絡實時識別的流程圖Fig.9 Flow chart of driving condition real-time recognition based on the learning vector quantization neural network 循環工況的在線識別可通過Labview軟件和Matlab軟件的聯合仿真來實現.在Matlab軟件中建立LVQNN模型,在Labview軟件中進行數據采集、數據處理及顯示等.兩者之間通過Labview軟件中的Matlab Script連接起來,LVQNN模型在Matlab軟件中生成,將Labview軟件采集得到的數據導入模型中,即可得到當前運行工況的識別結果. 由于Labview軟件調用的神經網絡模型是在Simulink環境中生成的,實時識別和離線識別的結果相同.經測試,識別實時性滿足實際使用要求. 本文以綜合工況中實際采集到的一段數據為識別對象,根據上述識別方法對綜合工況進行識別,識別結果如圖10所示.對綜合工況采用不同的控制策略進行仿真計算,結果如表6所示.其中IMP為采用不同控制策略時,其百公里油耗值相對于內燃機車輛減少的幅度.由于上述綜合工況中有接近2/3的工況為順暢工況和高架工況,內燃機車輛有較好的燃油經濟性,油耗為5.9 L/100 km.當采用傳統的規則控制策略時車輛的燃油經濟性相對于內燃機車輛提升了16.1%;當采用擁堵工況的新規則控制策略時,燃油經濟性比內燃機車輛還要差,因為設定的控制策略中只在需求功率較小時使用純電動模式,絕大部分時間發動機都處于啟動狀態.當采用順暢工況的新規則控制策略和高架工況的新規則控制策略時,燃油經濟性和內燃機車輛相比分別提高了10.3%和9.8%,但是仍然比傳統規則控制策略的燃油經濟性差;而增加工況識別后車輛燃油經濟性是最優的,比內燃機車輛提高了35.6%,比傳統的規則控制策略提高了23.2%.以上分析說明單個的新規則控制策略并不能使得所有工況都獲得較好的燃油經濟性,但是通過增加工況識別可以彌補這個缺陷,從而獲得更好的燃油經濟性. 表6 綜合工況下采用不同控制策略的百公里油耗 Tab.6 Fuel consumption per hundred kilometers of different strategies under comprehensive driving condition 控制策略Q/(L·100km-1)IMP/%ICEV傳統規則5.904.95-16.1新規則順暢工況5.2910.3高架工況5.329.8擁堵工況8.45-43.2增加工況識別3.8035.6 圖10 采用學習向量量化神經網絡對綜合工況的識別結果Fig.10 Recognition results of comprehensive driving condition by learning vector quantization neural network (1)與內燃機車輛相比,雙軸驅動混合動力車輛在采用傳統的規則控制策略時可以使得車輛在擁堵工況下的燃油經濟性提高59.6%,但是在快速路和高架工況下提高較少.采用動態規劃算法可以得到車輛在各個循環工況下理論最大的燃油經濟性. (2)對動態規劃算法中的決策變量進行簡化可以減少計算量,并簡化提取規則.通過對動態規劃的仿真結果進行分析,可以提取出新規則控制策略.與傳統的規則控制策略的仿真結果相比,新規則控制策略可以使得車輛在對應的循環工況下獲得更好的燃油經濟性,與動態規劃控制結果的差距在10.0%左右. (3)在綜合工況下,采用單一的新規則控制策略并不能獲得理想的燃油經濟性效果;而采用工況識別后,其燃油經濟性可比內燃機車輛提高35.6%,比采用傳統的規則控制策略提高23.2%. (4)本文的研究結果為杭州市內雙軸驅動混合動力車輛在循環工況條件下的能量管理策略的制定提供了理論依據. [1] ZHANG X,MI C.車輛能量管理:建模、控制與優化[M].張希,米春亭,譯.北京:機械工業出版社,2013: 12-17. [2] 劉希玲,丁焰.我國城市汽車行駛工況調查研究[J].環境科學研究,2000,13(1):23-27. LIU Xi-ling, DING Yan. Chinese research academy of environmental sciences [J]. Research of Environmental Sciences, 2000, 13(1): 23-27. [3] 王楠楠.城市道路行駛工況構建及油耗研究[D].合肥:合肥工業大學,2012: 26-46. WANG Nan-nan. Construction of the urban road driving cycle and research of the fuel consumption [D]. Hefei: Hefei University of Technology, 2012: 26-46. [4] 董恩源,顏文勝,申江衛,等.聚類分析法在城市公交行駛工況開發中的應用[J].昆明理工大學學報:自然科學版,2013,38(5): 41-45. DONG En-yuan, YAN Wen-sheng, SHEN Jiang-wei, et al. Application of cluster to development of city bus driving cycle [J]. Journal of Kunming University of Science and Technology: Natural Science Edition, 2013,38(5): 41-45. [5] KARANDE S, OLSON M, SAHA B. Development of representative vehicle drive cycles for hybrid applications [C] ∥ SAE 2014 World Congress and Exhibition. Michigan: SAE, 2014: 1900-1907. [6] 姜平,石琴,陳無畏,等.基于小波分析的城市道路行駛工況構建的研究[J].汽車工程,2011,33(1): 70-73. JIANG Ping, SHI Qin, CHEN Wu-wei, et al. A research on the construction of city road driving [J]. Automotive Engineering, 2011, 33(1): 70-73. [7] PHILLIPS A M, MCGEE R A, LOCKWOOD J T, et al. Control system development for the dual drive hybrid electric truck [J]. SAE International Journal of Engines, 2009, 2(1): 114-122. [8] SANGJOON K, JOONYOUNG P, JEONGHO H, et al. Transient control strategy of hybrid electric vehicle during mode change [C] ∥ SAE 2009 World Congress and Exhibition. Michigan: SAE, 2009: 67-73. [9] 杜愛民,馮旭云.雙軸驅動混合動力汽車能量管理策略仿真[J].同濟大學學報,2006,34(6): 800-804. DU Ai-min, Feng Xu-yun. Simulation on energy management strategy for 4 wheel-drive hybrid electric vehicle [J]. Journal of Tongji University, 2006,34(6): 800-804. [10] 馬東兵.四輪驅動混合動力汽車控制策略仿真與測試[D].上海:上海交通大學,2013: 29-39. MA Dong-bing. Simulation and test on the control strategy for four-wheel drive hybrid electric vehicle [D]. Shanghai: Shanghai Jiao Tong University, 2013: 29-39. [11] 李曉甫.橋間分配四驅混合動力電動汽車能耗優化控制策略研究[D].廣州:華南理工大學,2012: 61-104. LI Xiao-fu. Study of energy consumption optimal control strategy for axle-split 4WD hybrid electric vehicle [D]. Guangzhou: South China University of Technology, 2012: 61-104. [12] 曾小華,王慶年,王偉華,等.基于ADVISOR軟件的雙軸驅動混合動力汽車性能仿真模塊開發[J].汽車工程,2003,25(5): 424-427. ZENG Xiao-hua, WANG Qing-nian, WANG Wei-hua, et al. The development of a simulation module for the performance of two-axle drive HEV based on ADVISOR software [J]. Automotive Engineering, 2003,25(5): 424-427. [13] BANVAIT H, ANWAR S A. Rule-based energy management strategy for plug-in hybrid electric vehicle (PHEV) [C] ∥ 2009 American Control Conference. Missouri: AACC, 2009: 3938-3944. [14] FIORENZA S, LANZAFAME R, MESSINA M.Analysis of rules-based control strategies for integrated starter alternator vehicles [C] ∥ 2008 World Congress of SAE. Michigan: SAE, 2008:1314-1325. [15] BETSEKAS D P. Dynamic programming and optimal control [M]. 3th ed. Massachusetts: Massachusetts Institute of Technology, 2005. [16] LIN C C, PENG H. Power management strategy for a parallel hybrid electric truck [J]. IEEE Transactions Control Systems Technology, 2003, 11(6): 1-10. [17] KULIKOV I A, BAULINA E E, FILONOV A I. Optimal control of a hybrid vehicle’s powertrain minimizing pollutant emissions and fuel consumption [C] ∥ SAE 2014 Commercial Vehicle Engineering Congress.Illinois: SAE,2014: 2372-2376. [18] MURPHEY Y L, CHEN Z H, KILIARIS L, et al. Neural learning of driving environment prediction for vehicle power management [C]∥ 2008 International Joint Conference on Neural Networks. Hong Kong: IEEE, 2008: 3755-3760. [19] TIAN Y, ZHANG X, ZHANG L, et al. Intelligent energy management based on driving cycle identification using fuzzy neural network [C]∥ 2009 Second International Symposium on Computational Intelligence and Design. Hunan: IEEE, 2009: 501-504. [20] 田毅.電動汽車運行狀態識別及HEV控制策略研究[D].北京:北京交通大學,2010: 25-80. TIAN Yi. The research of electric vehicle driving situation identification and HEV control strategy [D]. Beijing: Beijing Jiao Tong University, 2010: 25-80. Energy management strategy of dual drive hybrid electric vehicle JIANG Dong-dong, LI Dao-fei, YU Xiao-li (InstituteofPowerMachineryandVehicularEngineering,ZhejiangUniversity,Hangzhou310027,China) The dual drive hybrid electric vehicle (DDHEV) was modeled and the Hangzhou driving cycles were constructed. The new rule based control strategy was extracted from the simulation results of the dynamic programming control strategy; the fuel-saving effect of the new rule based control strategy was evaluated. Results show that the fuel economy increases by 35.5% under the congestion driving cycle, by 24.9% under the smooth driving cycle and by 4.8% under the elevated highway driving cycle, respectively, compared with the traditional rule-based control strategy. To improve the adaptability of the new rule-based control strategy under different driving cycles, the learning vector quantization neural network was used to identify the comprehensive driving cycles; the control strategy parameters were adjusted according to the recognition results. Results indicate that, compared with a single new rule-based energy management strategy, the fuel economy increases by at least 28.2% under the comprehensive driving cycle with the new rule-based energy management strategy parameters adjusted by driving cycle’s recognition. The proposed approach can meet the practical application demand of the dual drive hybrid vehicles; the vehicle fuel economy is also improved. dual drive hybrid electric vehicle (DDHEV); driving cycle construction; energy management; rule extraction; driving mode recognition 2015-12-07. 國家自然科學基金資助項目(51205345);中央高校基本科研業務費專項資金資助項目;能源清潔利用國家重點實驗室自主課題(ZJUCEU2016005);浙江省重點科技創新團隊計劃資助項目(2011R50008);浙江省教育廳科研資助項目(Y201121739). 江冬冬(1991—),男,博士生,從事車輛能量管理、智能駕駛研究.ORCID:0000-0001-9471-1775. E-mail:jiangdongdong@zju.edu.cn 通信聯系人:李道飛,男,副教授.ORCID:0000-0002-6909-0169.E-mail:dfli@zju.edu.cn 10.3785/j.issn.1008-973X.2016.12.001 U 469. 72 A 1008-973X(2016)12-2245-09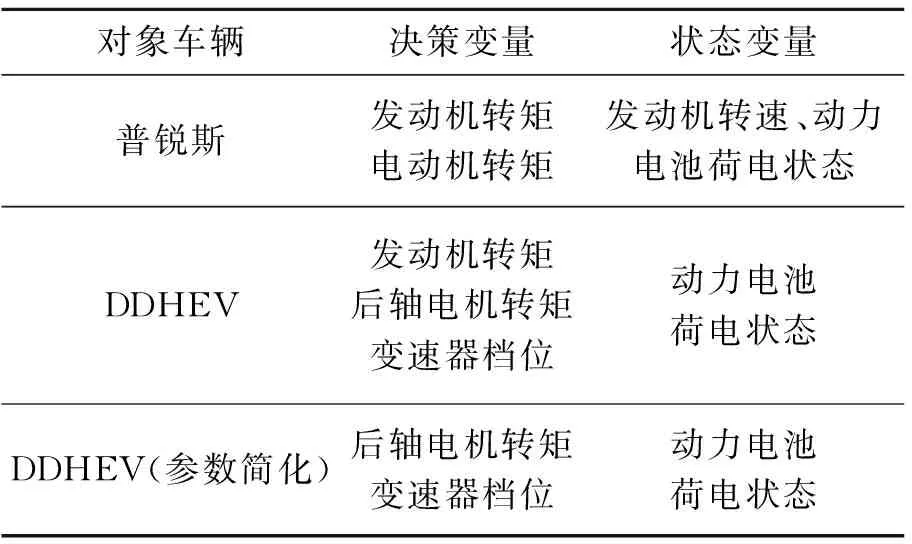

4 工況識別

5 結 論
猜你喜歡
房地產導刊(2022年4期)2022-04-19 09:04:10
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
汽車工程師(2021年12期)2022-01-17 02:29:58
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
通信電源技術(2016年1期)2016-04-16 04:57:26
