機載SAR運動補償殘余誤差建模及影響分析
2016-01-26 01:45:20毛永飛高文軍韓運忠
測繪通報 2015年1期
毛永飛,高文軍,韓運忠
(北京空間飛行器總體設計部,北京 100094)
Analysis of Residual Errors in SAR Motion Compensation
MAO Yongfei,GAO Wenjun,HAN Yunzhong
?
機載SAR運動補償殘余誤差建模及影響分析
毛永飛,高文軍,韓運忠
(北京空間飛行器總體設計部,北京 100094)
Analysis of Residual Errors in SAR Motion Compensation
MAO Yongfei,GAO Wenjun,HAN Yunzhong
摘要:在基于運動傳感器測量數據的機載SAR運動補償方法中,IMU/GPS測量誤差和地物定位誤差等非理想因素的存在會導致相位補償量的不準確,進而引入殘余運動誤差,影響SAR圖像質量。本文針對IMU的各項測量誤差、系統延時誤差、多普勒中心頻率誤差、參考DEM誤差等影響軌跡測量和地物定位精度的具體因素展開研究,建立了上述因素與殘余運動誤差之間的函數關系。該函數關系顯示,殘余運動誤差主要來源于航跡測量誤差和地物定位誤差,航跡測量誤差主要根源于IMU/GPS測量單元中加速度計的常值漂移和IMU關于姿態角的測量誤差,地物定位誤差主要根源于參考DEM誤差等因素。本文通過建模分析,完成了對機載SAR運動補償精度退化機理的研究。
關鍵詞:合成孔徑雷達;運動補償;殘余誤差;IMU
一、引言
合成孔徑雷達(synthetic aperture radar,SAR)能夠借助平臺的運動實現對觀測場景的二維成像,它不受天氣和日照條件的限制,能夠全天時全天候地對地觀測。SAR原理要求天線相位中心(antenna phase center,APC)做勻速直線運動,但實際中由于受大氣湍流和人為控制的影響,APC總是偏離理想運動狀態而產生運動誤差[1-2]。運動誤差會對SAR成像及后續的干涉、定位處理造成嚴重影響[1-4]。因此,為了保證SAR成像、干涉、定位的質量與精度,必須對SAR的運動誤差進行補償。在工程化處理中,通常選用基于傳感器測量數據的SAR運動補償方法[5-10]。
基于運動傳感器測量數據的運動補償方法利用IMU(inertial measurement unit)和GPS等儀器測量平臺的運動狀態[2-3],并由此對SAR回波數據進行相關處理,使之等效為勻速直線運動。但軌跡測量誤差和地物定位誤差會導致運動補償中不準確的相位補償量,從而引入殘余運動誤差。影響航跡測量誤差的因素是IMU測量誤差;影響地物定位誤差因素主要有系統延時誤差、多普勒中心頻率誤差、參考DEM誤差。定量地分析殘余運動誤差的具體來源、產生機理和影響范圍,對于SAR系統有著重要意義,具體表現在:建立運動誤差的物理模型,摸清各類運動方式的作用機理和影響程度;為SAR平臺飛行控制方案的設計提供參考,以盡可能地抑制影響程度較大的運動方式(如高階運動、橫滾運動);為運動測量傳感器系統的設計提供參考,盡量使測量資源的分配與運動誤差的影響程度相匹配,即優先保證對影響程度較大的運動方式的測量精度;為設計殘余運動誤差的補償方法提供科學依據。
運動補償的質量與IMU/GPS的測量精度有著密切關系。因此,有必要定量分析IMU/GPS測量誤差與殘余運動誤差之間的關系,這對于探究SAR產品質量退化機理和確定雷達系統中IMU的選型有重要意義。關于IMU自身測量精度的研究文獻較多,而關于IMU/GPS測量誤差對運動補償的影響,現有文獻缺乏深入而完備的論述[2,11]。
系統延時誤差、多普勒中心頻率誤差、參考DEM誤差等因素同樣會影響運動補償的質量。此類因素會導致地物目標定位誤差,進而造成運動補償中不準確的相位補償量,從而引入殘余運動誤差。關于此類誤差因素對運動補償的影響,現有文獻多集中于分析參考DEM誤差的影響[5,12-15],而缺乏對多種誤差因素的綜合分析。
在內容安排上,本文首先分析了基于IMU/GPS測量數據的SAR運動補償方法中殘余誤差的產生機理,建立了殘余運動誤差的數學模型;其次分別對航跡測量誤差和地物定位誤差等非理想因素的影響進行了分析。
二、殘余運動誤差分析
在基于運動傳感器測量數據的運動補償方法中,IMU/GPS測量誤差和地物定位誤差會導致運動補償中不準確的相位補償量,從而引入殘余運動誤差[17]。本節致力于分析該殘余運動誤差的具體來源和產生機理,重點針對IMU/GPS的各項測量誤差、系統延時誤差、多普勒中心頻率誤差、參考DEM誤差等影響軌跡測量和地物定位精度的具體因素展開研究,推導上述因素與殘余運動誤差之間的函數關系。
基于IMU/GPS測量數據的SAR運動補償幾何關系如圖1所示。圖中x軸指向理想航跡方向,y軸指向理想航跡的右視方向,z軸指向正下方向,點A、B、C分別表示理想航跡、真實航跡和測量航跡上的APC位置,點Treal、Tref分別表示地物目標的真實位置和參考位置,Rnreal表示APC理想位置與地物真實位置之間的斜距,Rr表示APC真實位置與地物真實位置之間的斜距,Rnref表示APC理想位置與地物參考位置之間的斜距,Rm表示APC測量位置與地物參考位置之間的斜距,所謂地物參考位置是指運動補償處理中所用到的地物位置坐標。運動補償時,首先從測量航跡中擬合出線性理想航跡,然后在窄波束近似的前提下,式(1)所示的相位誤差將被補償掉[16-19]。
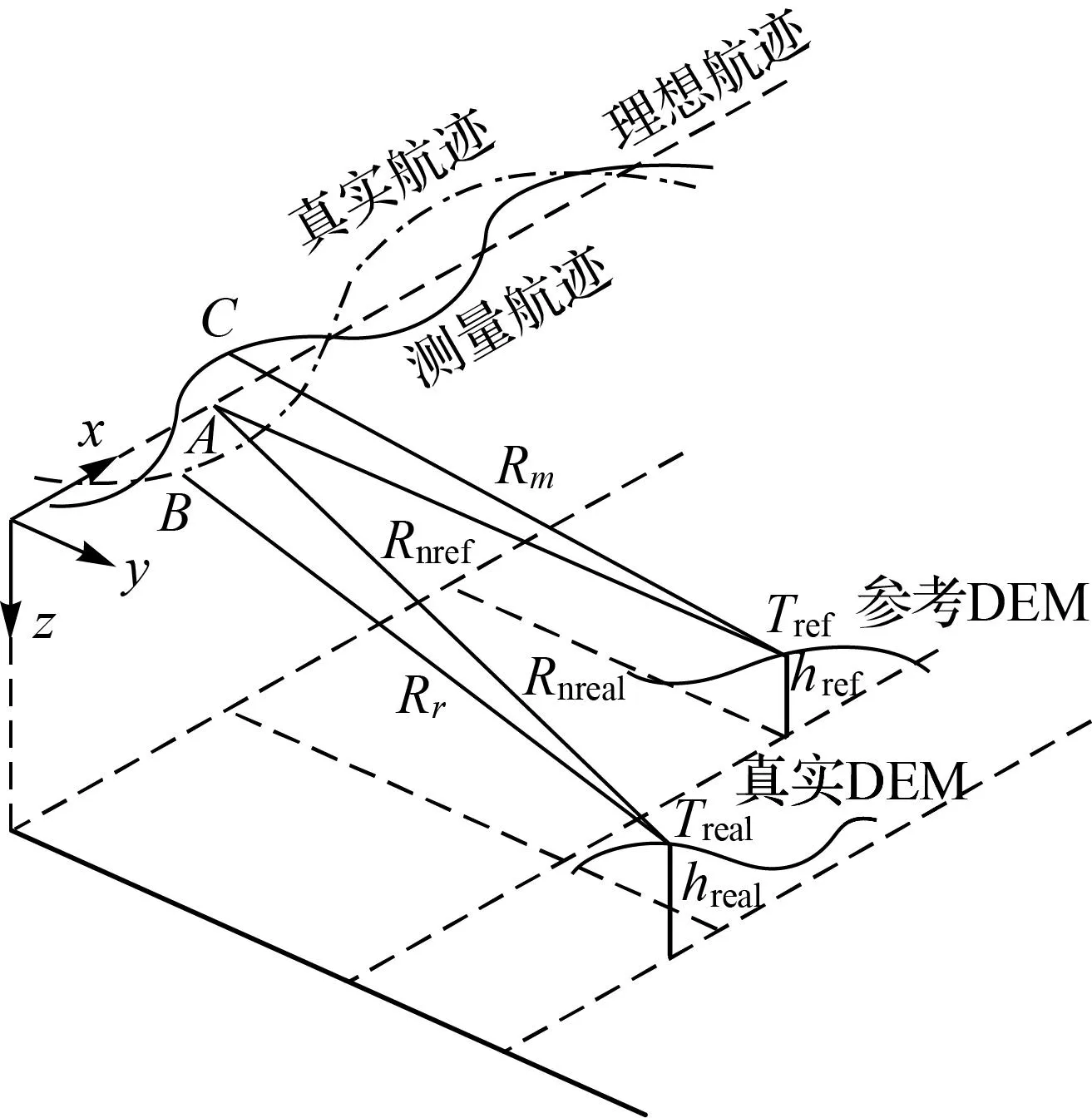
圖1 SAR運動補償幾何關系(包含軌跡測量誤差和地物定位誤差)
(1)
式中,λ為雷達波長;η為方位向時間。而實際中應該被補償掉的相位誤差為
(2)
對比式(1)和式(2)可知,運動補償后雷達信號中殘余的相位誤差可表示為
e(η)=e1(η)-e2(η)=
(3)
(4)
(5)
(6)

(7)
(8)
式(3)所表示的相位誤差位于完成距離向壓縮和距離徙動校正后的二維時域,則此域中包含殘余運動誤差的信號可表示為[16,18]
(9)
(10)
式中,FFTη表示方位向傅里葉變換。
如果不存在殘余運動誤差,則在距離多普勒域內完成方位向壓縮的信號可表示為[16,18]
(11)
式中,A2為復常數;Wa為距離多普勒域內的方位向天線包絡。
對比式(10)和式(11)可知,距離多普勒域內的殘余運動誤差可表示為[16,18]
(12)
由式(3)—式(12)可知,運動補償殘余相位誤差φerr主要依賴于參數誤差Δx、Δy、Δz、ΔR0、Δfdc和Δh。其中參數誤差Δx、Δy和Δz主要來源于IMU/GPS的測量誤差,參數誤差ΔR0、Δfdc和Δh主要造成地物目標的定位誤差。換言之,SAR系統的殘余運動誤差主要來源于IMU/GPS測量誤差和地物定位誤差。鑒于GPS為通用技術,IMU/GPS測量誤差主要取決于IMU的性能;地物定位誤差主要取決于系統延時誤差、多普勒中心頻率誤差、參考DEM誤差等因素。
總之,運動補償殘余相位誤差的二次及以上項會影響SAR圖像的質量。SAR系統的殘余運動誤差主要來源于IMU的各項測量誤差,以及系統延時誤差、多普勒中心頻率誤差、參考DEM誤差等影響地物定位精度的因素。本文后續兩節將分別對由IMU測量誤差和地物定位誤差所造成的殘余運動誤差進行具體分析。
三、軌跡測量誤差導致的殘余運動誤差
在不考慮地物定位誤差的條件下,基于運動傳感器測量數據的SAR運動補償的幾何關系如圖2所示,其中x軸指向理想航跡方向,y軸指向理想航跡的右視方向,z軸指向正下方向,點A、B、C分別表示理想航跡、真實航跡和測量航跡上的APC位置,點T表示地物目標的位置,Rr、Rn和Rm分別表示地物目標與真實航跡、理想航跡和測量航跡之間的距離。由式(3)的推導過程可知,雷達回波中的運動補償殘余相位誤差可表示為
(13)
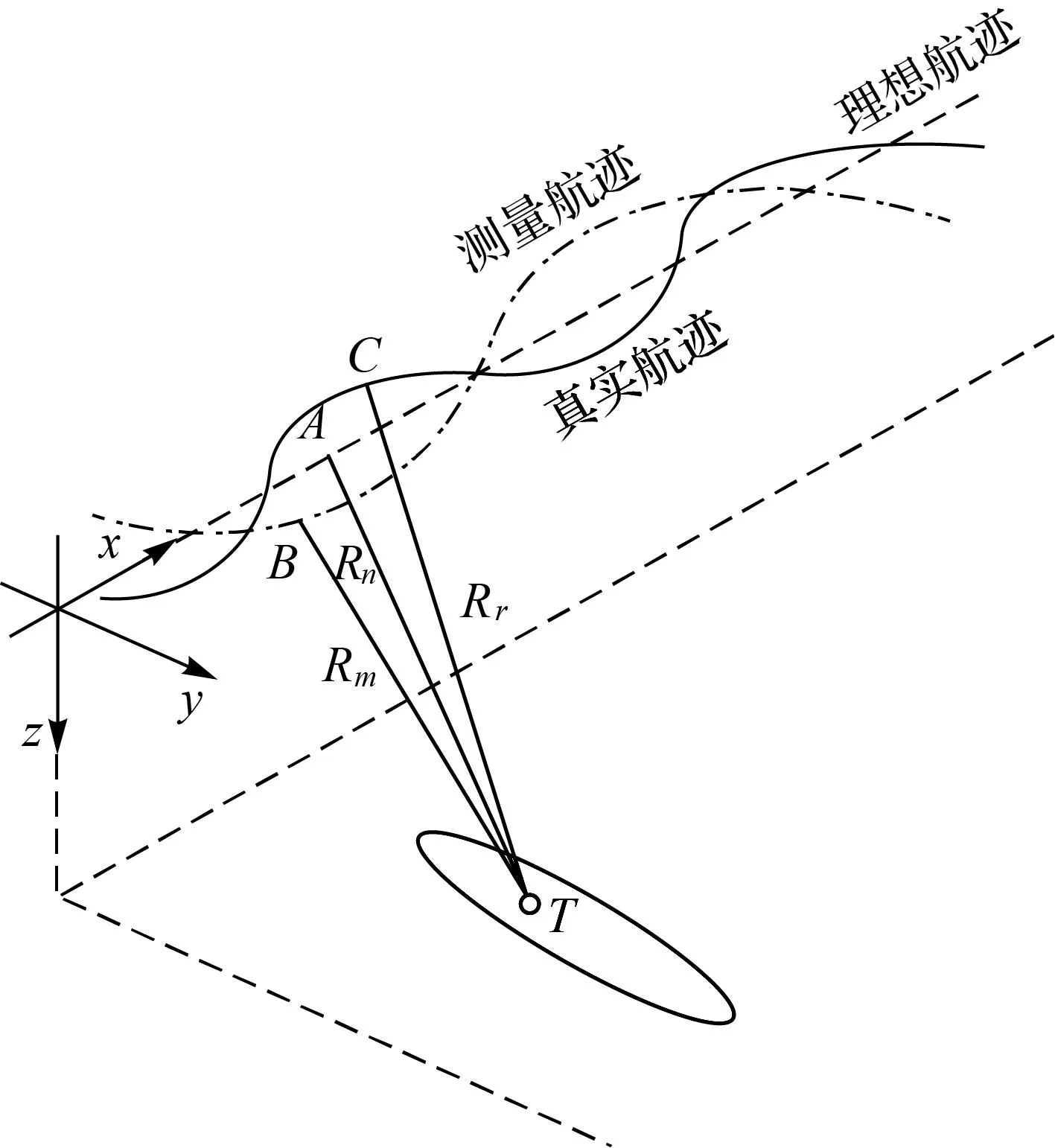
圖2 SAR運動補償幾何關系(僅包含軌跡測量誤差)
為了分析軌跡測量誤差對SAR成像的影響,需要計算IMU/GPS測量誤差所導致的各次相位誤差。鑒于GPS為通用技術,IMU/GPS的測量精度主要依賴于IMU的性能。IMU的系統組成包括3個正交的加速度計和3個正交的陀螺儀。加速度計可以直接測量平臺運動的加速度參數,并可通過積分得出平臺的速度和位移參數。陀螺儀用來測量平臺轉動的角速率,并可通過積分得出平臺轉動的角度。如圖3所示,其中A1代表APC,I代表IMU,T代表地物目標,θr、θp、θy分別表示橫滾角、俯仰角、偏航角,x軸指向理想航跡方向,y軸指向理想航跡的右視方
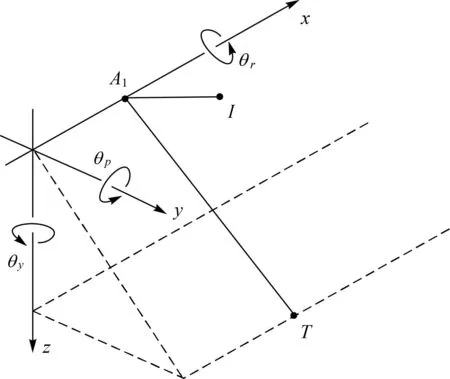
圖3 SAR天線與IMU的幾何關系
向,z軸指向正下方向,在IMU與APC之間存在一個杠桿臂, IMU直接測量的是I點的運動參數, 而
APC處的運動參數需要將IMU的測量值通過杠桿臂換算得到。總之,IMU的測量誤差會在杠桿臂的作用下造成對APC的測量誤差(IMU的姿態測量誤差會在杠桿臂的作用下造成APC的速度與位置誤差),APC處的軌跡測量誤差會導致SAR運動補償算法中存在殘余誤差,進而影響SAR圖像的質量。
通過對IMU/GPS測量誤差所導致的SAR回波的相位誤差進行分析計算,可知IMU的測量誤差主要會導致APC位置處的三次及以下誤差,其中只有沿雷達視線(line of sight,LOS)方向的二次、三次誤差才會影響SAR圖像的質量。由IMU測量誤差所導致的沿LOS方向的SAR二次、三次相位誤差可表示為[17]
(14)
(15)

(16)
(17)
由式(16)可知,二次相位誤差主要由加速度計的常值漂移和IMU關于橫滾角、俯仰角的測量誤差所導致。由式(17)可知,三次相位誤差主要由陀螺儀測量角速率時的常值漂移所導致。另外,由式(16)和式(17)可知,IMU的測量誤差所導致的二次和三次相位誤差會隨著雷達視角和載頻的增大而增大。
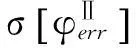
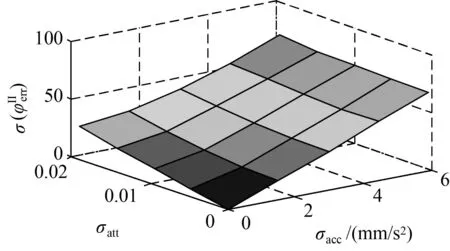
圖4 二次相位誤差隨相關參數的變化曲線(g=9.8 m/s2,θ=50°,λ=3.12 cm,t=1 s)
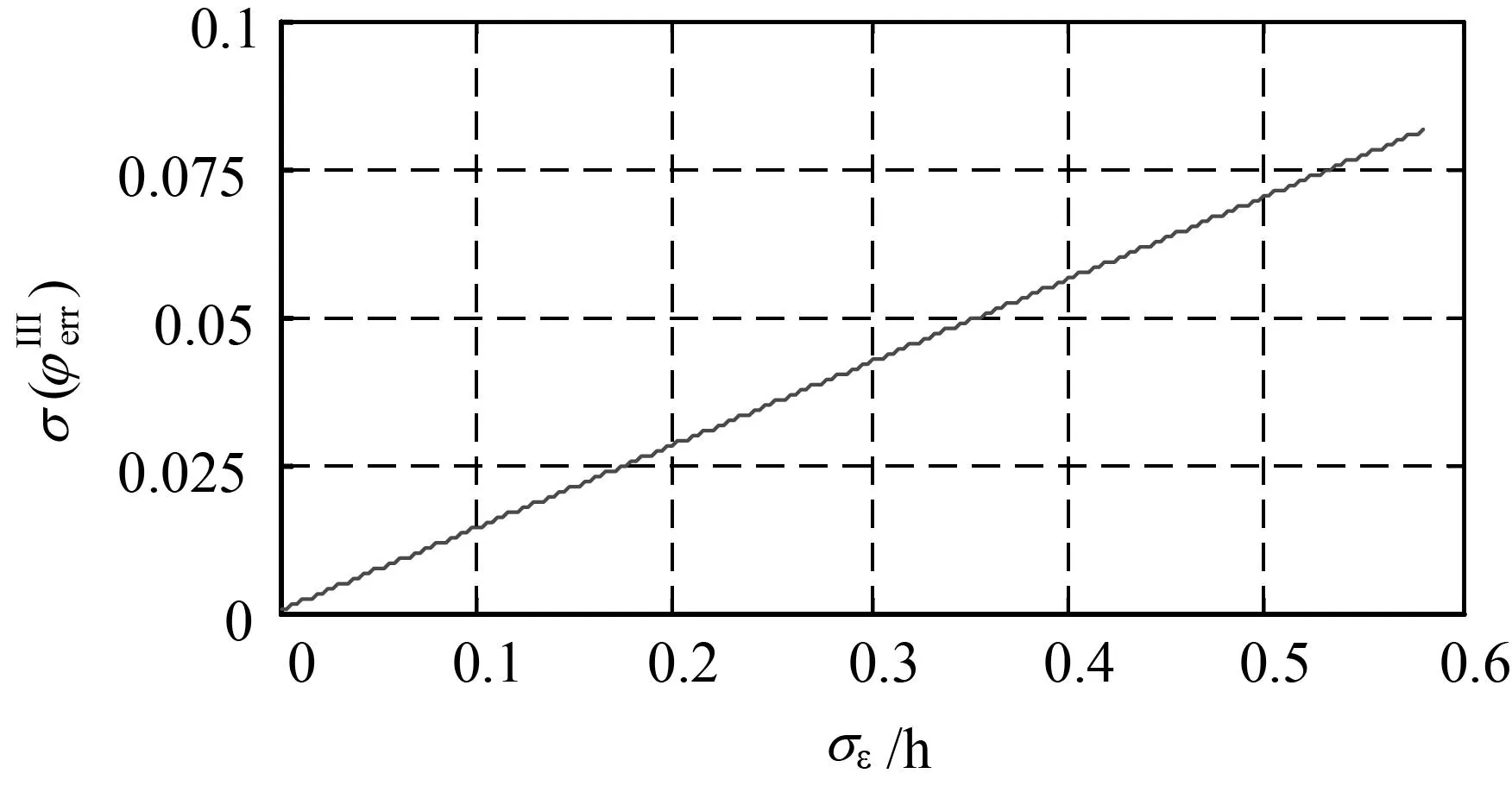
圖5 三次相位誤差隨參數σε的變化曲線(θ=50°,g=9.8 m/s2,λ=3.12 cm,t=1 s)
以POSAV510型號的IMU為例,應用本文模型對其測量誤差所導致的SAR回波相位誤差進行了分析計算。POSAV510的測量精度指標為σa=0.3mg,σroll=0.008°,在與數據頻率為20Hz的GPS配合測量時,IMU/GPS的航跡測量誤差會導致SAR回波中出現0.000 5π(X波段)、0.001 8π(Ka波段)的二次相位誤差,該相位誤差滿足SAR高聚焦成像的要求(IRW展寬不超過2%),這一計算結果能很好地與工程實踐結果相符合,這說明了本文模型的正確性。
綜上所述,IMU測量誤差會在運動補償階段引入殘余相位誤差。具體來說,主要會引入三次及以下次的相位誤差。三次相位誤差主要來源于陀螺儀關于角速率測量的常值漂移,但其數值通常較小,可以忽略不計。二次相位誤差主要來源于加速度計的常值漂移和IMU關于姿態角的測量誤差,其數值不可忽略,因而會影響SAR圖像的質量。IMU測量誤差造成的二次相位誤差可由式(14)精確計算,其取值主要依賴于加速度計的常值漂移、IMU關于姿態角的測量誤差、雷達載頻和雷達視角。
四、地物定位誤差導致的殘余運動誤差
運動補償時的地物定位誤差是指:為了計算準確的相位補償量,需要計算真實航跡、理想航跡(勻速直線運動)與地物目標的斜距差,這要求獲知地物目標的三維坐標。而在SAR測量前地物目標的位置通常是未知的,工程化處理時通常采用平地假設來給定地物目標的高程坐標(即運動補償中的參考DEM),再結合斜距延時、多普勒中心等約束條件來近似獲取地物目標的三維坐標。這種近似獲取的地物坐標會導致相位補償量的不準確,進而在運動補償處理中引入誤差。
本節主要分析系統延時誤差、多普勒中心頻率誤差、參考DEM誤差等影響地物定位精度的因素所引入的殘余運動誤差[5,18]。地物目標的定位主要由3個約束條件決定:①地物目標的斜距,由雷達采樣延時給出;②地物目標處的多普勒頻率,可由雷達回波數據估計出來;③地物目標的高程,由運動補償時的參考DEM給出。由上述3個約束條件,即可計算出地物目標在距離向、方位向、高度向的坐標。式(7)和式(8)分別給出了在理想和包含誤差的條件下由上述3個約束條件求解地物目標位置的數學表達式。
參數誤差ΔR0、Δfdc、Δh所造成的殘余運動誤差可由式(12)計算,本節結合雷達實測數據對參數誤差ΔR0、Δfdc、Δh所導致的殘余運動誤差進行了試驗分析。所選雷達數據為機載X波段SAR數據,該雷達數據對應的航跡三維坐標如圖6所示。本節僅討論地物定位誤差對運動補償的影響,故認為雷達航跡是準確的,并將其作為已知條件使用。
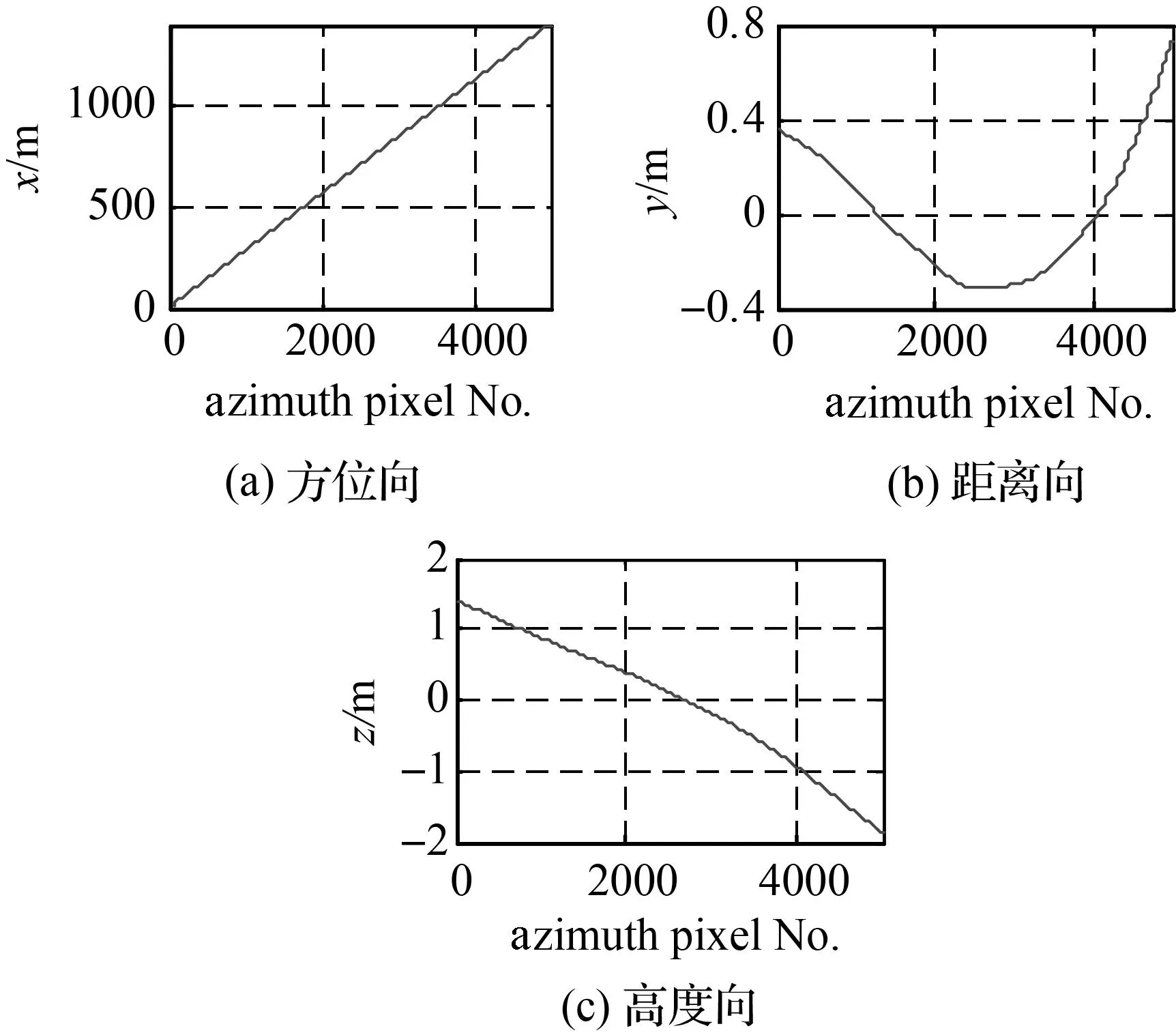
圖6 雷達航跡的三維坐標
影響地物定位精度的各參數誤差如圖7所示。圖7(a)所示的斜距誤差ΔR0(即系統延時誤差)通常比較穩定,試驗時將回波延時的測量值與估計值之差作為ΔR0的取值;圖7(b)所示的多普勒中心頻率誤差是指由SAR回波數據估計出的多普勒中心頻率與其真實值之間的誤差,試驗時將由載機運動和姿態數據計算得出的多普勒中心頻率視作真實值;圖7(c)所示的參考DEM誤差是指運動補償所用的參考DEM與真實DEM之間的高程差,實際處理中常用平地假設作為參考DEM,試驗時將干涉處理后得到的DEM視為真實高程。
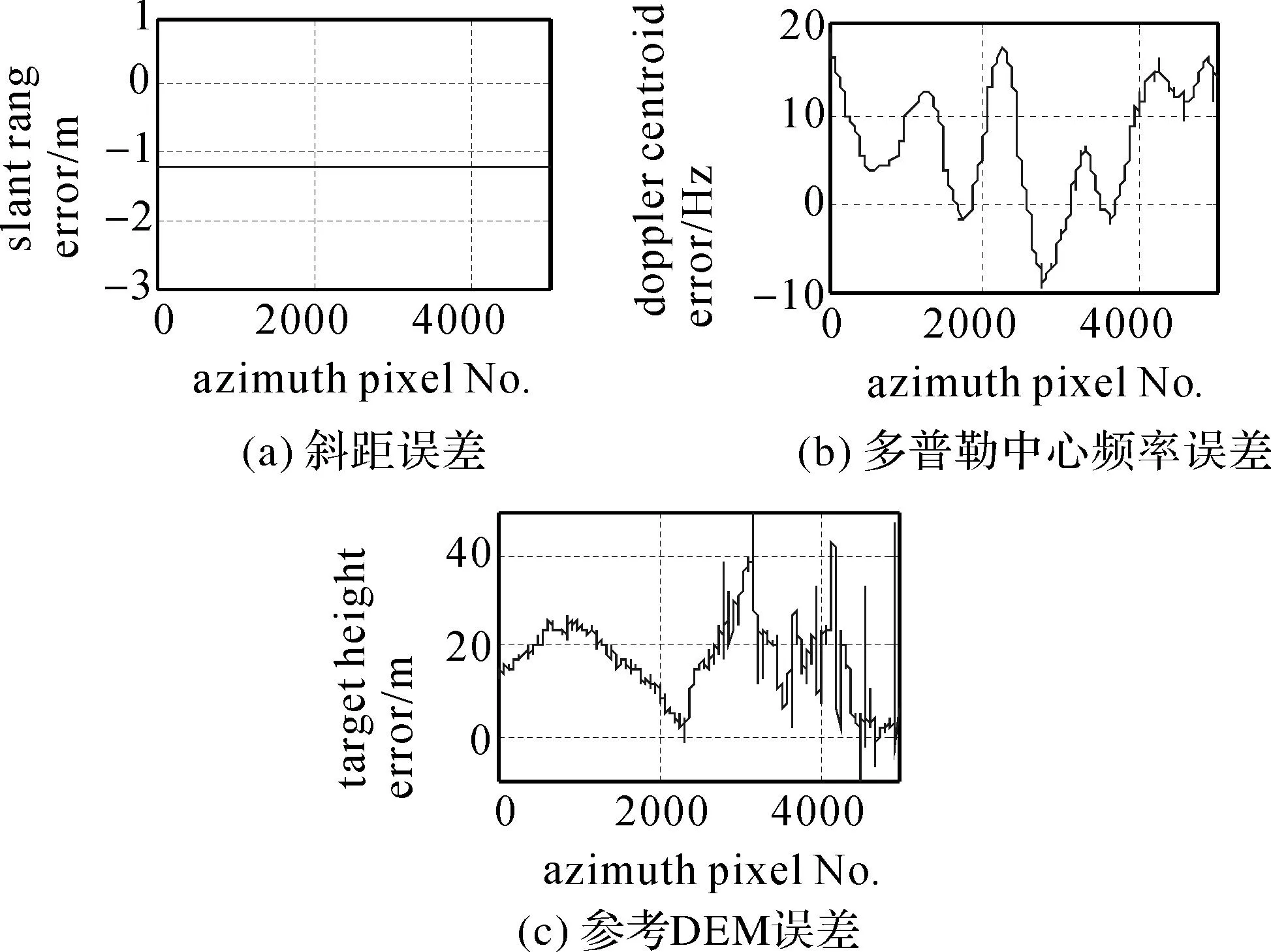
圖7 影響地物定位精度的參數誤差
導致地物定位誤差的各因素所引入的運動補償殘余相位誤差如圖8所示。圖8(a)為雷達回波域的殘余運動誤差,是在圖6所示的航跡條件和圖7所示的參數誤差條件下,由式(3)計算得出的;圖8(b)為完成二維聚焦和距離徙動校正后距離多普勒域內的運動補償殘余相位誤差(方位向兩端不完全孔徑內的數據已去除),此相位誤差的各次分量直接反映了SAR圖像的質量;圖8(c)為圖8(b)中的相位誤差去除常數項和一次項后的結果,由圖8(c)可知,運動補償殘余相位誤差中二次及以上量的數值不超過0.41πrad,這說明SAR圖像的主瓣展寬不超過5%[17]。這一結果與實際處理中所得SAR圖像的質量效果基本相符。
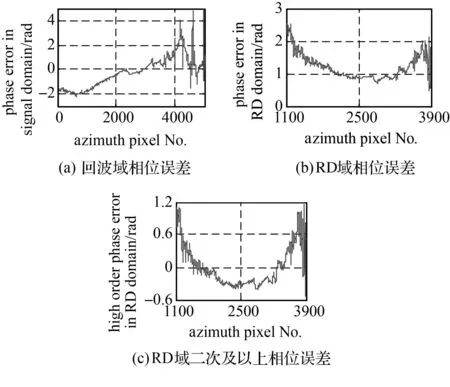
圖8 地物目標的定位誤差所引入的運動補償殘余相位誤差
五、結束語
本文圍繞SAR系統的殘余運動誤差展開研究,分析了基于IMU/GPS測量數據的運動補償方法的殘余誤差來源,建立了殘余運動誤差的數學模型,并基于該模型分析計算了航跡測量誤差與地物地位誤差對SAR成像的具體影響。本文分析結果認為殘余運動誤差主要來源于航跡測量誤差和地物定位誤差,航跡測量誤差主要根源于IMU/GPS測量單元中加速度計的常值漂移和IMU關于姿態角的測量誤差,地物定位誤差主要根源于系統延時誤差、多普勒中心頻率計算誤差、參考DEM誤差。在本文工作的基礎上,進一步的研究工作分為兩個方面:一是分析各種來源的殘余運動誤差對下游處理(干涉、定位)的影響;二是針對殘余運動誤差的影響機理,設計相應的誤差補償算法。
參考文獻:
[1]FORNAROG.TrajectoryDeviationsinAirborneSAR:AnalysisandCompensation[J].IEEETransactionsonAerospaceandElectronicSystems, 1999, 35(3): 997-1009.
[2]FORNAROG,FRANCESCHETTIG,PERNAS.MotionCompensationErrors:EffectsontheAccuracyofAirborneSARImages[J].IEEETransactionsonAerospaceandElectronicSystems, 2005, 41(4): 1338-1352.
[3]BUCKREUSSS.MotionErrorsinAnAirborneSyntheticApertureRadarSystem[J].EuropeanTransactionsonTelecommunications, 1991, 2(6): 655-664.
[4]MALLORQUíJJ,ROSADOI,BARAM.InterferometricCalibrationforDEMEnhancingandSystemCharacterizationinSinglePassSARInterferometry[C]∥ProceedingsofIEEE2001InternationalGeoscienceandRemoteSensingSymposium.[S.l.]:IEEE, 2001: 404-406.
[5]唐曉青. 機載干涉SAR運動誤差建模與補償方法研究[D]. 北京: 中國科學院電子學研究所, 2009.
[6]WOODJW.TheRemovalofAzimuthDistortioninSyntheticApertureRadarImages[J].InternationalJournalofRemoteSensing, 1988, 9(6): 1097-1107.
[7]WERNESSSAS,CARRARAWG,JOYCELS,etal.MovingTargetImagingAlgorithmforSARData[J].IEEETransactionsonAerospaceandElectronicSystems, 1990, 26(1): 57-67.
[8]WAHLDE,EICHELPH,GHIGLIADC,etal.PhaseGradientAutofocus—ARobustTollforHighResolutionSARPhaseCorrection[J].IEEETransactionsonAerospaceandElectronicSystems, 1994, 30(3): 827-835.
[9]MOREIRAJR.ANewMethodofAircraftMotionErrorExtractionfromRadarRawDataforRealTimeMotionCompensation[J].IEEETransactionsonGeoscienceandRemoteSensing, 1990, 28(4): 620-626.
[10]ISERNIAT,PASCAZIOV,PIERRIR,etal.SyntheticApertureRadarImagingfromPhase-corruptedData[J].IEEEProceedings—Radar,Sonar,Navigation, 1996, 143(4): 268-274.
[11]DIFILIPPODJ,HASLAMGE,WIDNALLWS.EvaluationofAKalmanFilterforSARMotionCompensation[C]∥IEEEPositionLocationandNavigationSymposium.Orlando,FL:IEEE, 1988: 259-268.
[12]PRATSP,REIGBERA,MALLORQUIJJ.Topography-dependentMotionCompensationforRepeat-passInterferometricSARSystems[J].GeoscienceandRemoteSensingLetters,IEEE, 2005, 2(2): 206-210.
[13]FORNARO G, FRANCESCHETTI G, PERNA S. On Center-beam Approximation in SAR Motion Compensation[J]. IEEE Geoscience and Remote Sensing Letters, 2006, 3(2): 276-280.
[14]ZHENG X, YU W D, LI Z. A Novel Algorithm for Wide Beam SAR Motion Compensation Based on Frequency Division[C]∥IEEE International Conference on Geoscience and Remote Sensing Symposium. Denver,USA: IEEE, 2006: 3160-3163.
[15]PRATS P, DE MACEDO K A C, REIGBER A, et al. Comparison of Topography and Aperture-dependent Motion Compensation Algorithms for Airborne SAR[J]. IEEE Geoscience and Remote Sensing Letters, 2007, 4(3): 349-353.
[16]MOREIRA A, HUANG Y H. Airborne SAR Processing of Highly Squinted Data Using a Chirp Scaling Approach with Integrated Motion Compensation[J]. IEEE Transactions on Geoscience and Remote Sensing, 1994, 32(5): 1029-1040.
[17]MAO Y F, XIANG M S, WEI L D, et al. The Effect of IMU Inaccuracies on Airborne SAR Imaging[J]. Journal of Electrics (China), 2011, 28(4-6): 409-418.
[18]MAO Y F, XIANG M S, WEI L D, et al. Error Analysis of SAR Motion Compensation[C]∥IEEE International Conference on Imaging Systems and Techniques. Manchester: IEEE, 2012: 377-380.
[19]李芳芳, 仇曉蘭, 孟大地, 等. 機載雙天線InSAR運動補償誤差的影響分析[J]. 電子與信息學報, 2013, 35(3): 559-567.
引文格式: 毛永飛,高文軍,韓運忠. 機載SAR運動補償殘余誤差建模及影響分析[J].測繪通報,2015(1):44-49.DOI:10.13474/j.cnki.11-2246.2015.0008
作者簡介:毛永飛(1983—),男,博士,工程師,主要從事合成孔徑雷達、雷達系統設計、相控陣天線方面的研究。E-mail: myfchn@163.com
基金項目:國家自然科學基金(61302165)
收稿日期:2014-07-30
中圖分類號:P237
文獻標識碼:B
文章編號:0494-0911(2015)01-0044-06
