十八旋翼無人機牽放大直徑迪尼瑪引繩技術
2016-02-05 11:37:16朱傳寶秦向軍王延濤朱建輝曹傳文
山東電力技術 2016年12期
關鍵詞:施工
朱傳寶,秦向軍,王延濤,朱建輝,曹傳文
(山東送變電工程公司,濟南250022)
十八旋翼無人機牽放大直徑迪尼瑪引繩技術
朱傳寶,秦向軍,王延濤,朱建輝,曹傳文
(山東送變電工程公司,濟南250022)
隨著張力放線技術不斷成熟,多旋翼無人機牽放初級引繩施工工藝應用越來越廣泛,但目前施工技術只能展放安全系數較低的韓國絲。以增強無人機牽引力、續航能力和抗不良氣象能力為切入點,研制十八旋翼無人機,成功實現牽放Φ6 mm迪尼瑪繩,達到提高初級引繩牽放效率和安全性的目標。工程實際應用證明,本技術對提高機械化施工應用率具有一定的參考價值。
十八旋翼;無人機;牽放;迪尼瑪繩
0 引言
自20世紀80年代開始,為減少放線施工造成的農作物損壞,送變電行業開始嘗試張力展放初級引繩方法,如利用槍榴彈、射鯨槍、迫擊炮、氣象火箭等攜帶引繩飛越障礙物,但均收效甚微。在實踐經驗積累的基礎上,2000年起,氫氣球、動力傘、飛艇等飛行器開始逐漸推廣應用于地形復雜、氣候多變、高海拔地區[1]。2012年,隨著多旋翼無人機的技術日臻成熟[2],四旋翼、六旋翼無人機開始嘗試牽放韓國絲,但是韓國絲存在強度低、易斷的缺點,一直是引繩牽放工作的巨大安全隱患[3]。為尋求更加安全高效的施工方法,改進十八旋翼無人機,實現飛行器直接展放大直徑迪尼瑪繩目標。經過多次試驗和改進,在500 kV海陽核電—大澤輸電線路工程跨海段張力放線施工中,成功牽放Φ6 mm迪尼瑪引繩,完成無人機牽放大直徑引繩。

圖1 十八旋翼無人機
1 十八旋翼無人機
通過延長臂展、平衡增加旋翼、采用高容量電源、設計接力遙控等措施,將六旋翼無人機改造為十八旋翼無人機,如圖1所示。十八旋翼無人機具有更好的提升能力、更大的巡航里程和更高的飛行精度,并且增加GPS模塊,具備編程飛行和一鍵返航能力,能夠更好地實現無人機牽放大直徑迪尼瑪引繩的目標[4-5]。其性能參數如表1所示。
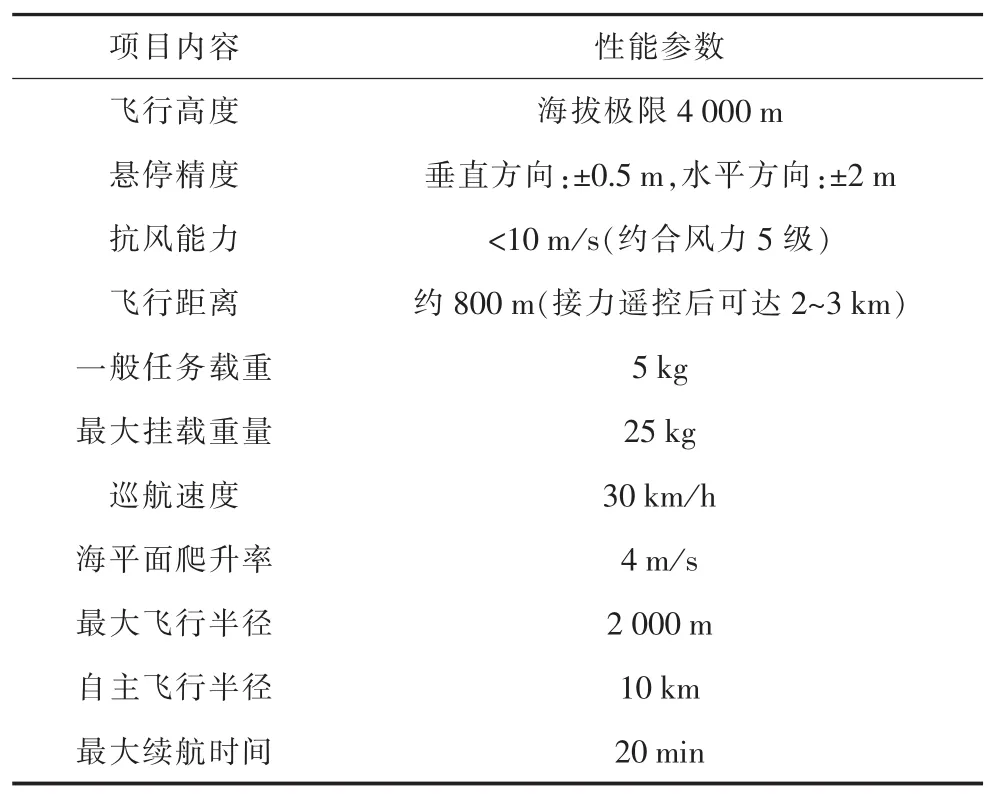
表1 十八旋翼無人機技術指標
2 放線流程
以500 kV海陽核電—大澤輸電線路工程C1~ C5放線區段為例,詳細介紹十八旋翼無人機放線施工流程。500 kV海陽核電—大澤輸電線路工程C1~ C5放線區段桿塔參數如表2所示。C1~C5區段跨越碼頭2處、海參池1處、自然海域1處,地形復雜,跨越帶電電力線,海上風高浪急,無法人工牽放初級引繩,采用動力傘牽放危險性高。
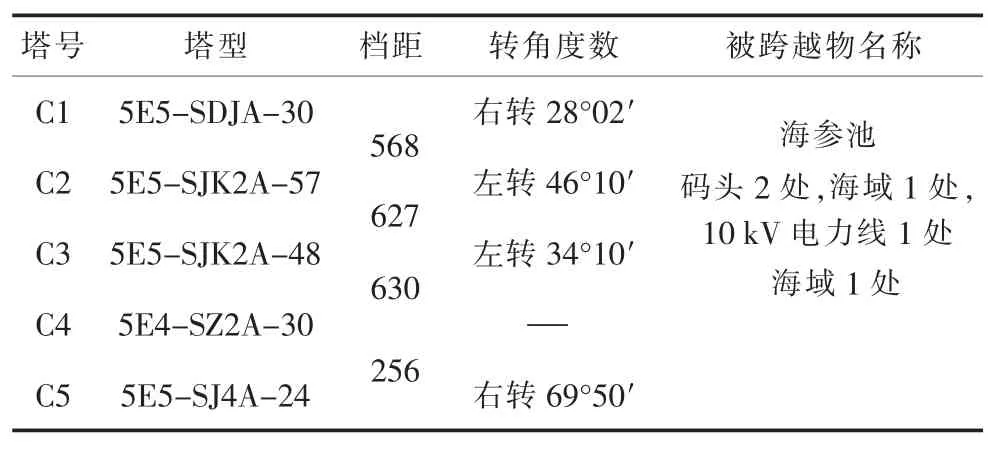
表2 桿塔參數
2.1 施工準備
Φ6 mm迪尼瑪繩定長1 000 m,根據檔距和跨越海域等實際情況,確定C2和C4為起降場地。計劃在C1~C5區段牽放2根引繩,如圖2所示,具體步驟為:C2大號側第1次起飛,牽放C1~C2第1根引繩;C2大號側第2次起飛,牽放C1~C2第2根引繩;C2小號側第3次起飛,牽放C2~C3第1根引繩;C2小號側第4次起飛,牽放C2~C3第2根引繩;C4大號側第1次起飛,牽放C4~C3第1根引繩;C4大號側第2次起飛,牽放C4~C3第2根引繩;C4小號側第3次起飛,牽放C4~C5第1根引繩;C4小號側第4次起飛,牽放C4~C5第2根引繩。需要配備的相應材料如表3所示。
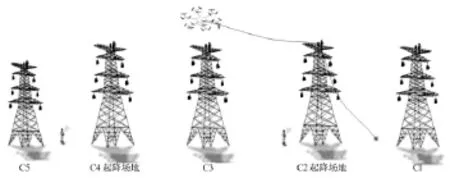
圖2 引繩展放示意
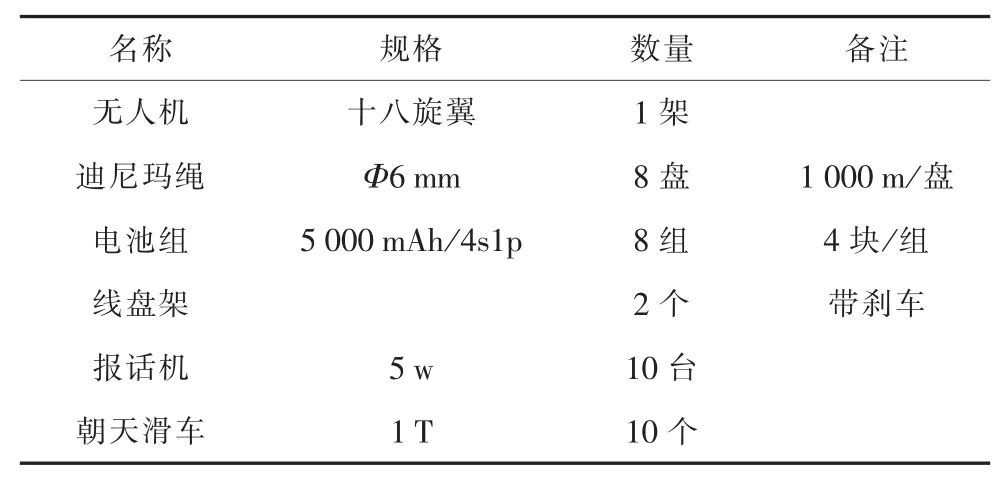
表3 配備材料
根據區段鐵塔數量和跨越情況,安排現場指揮1名,安全員1名,無人機操作人員2名,線盤控制人員2名,高空技工5名,地面普工2名,跨越碼頭處看護人員2名。
2.2 施工流程
放線施工流程如圖3所示。無人機組裝,安裝電池組,測試拋繩機構靈敏度,掛迪尼瑪繩,綁扎沙袋,接收GPS信號。迪尼瑪繩線盤上架,調整線盤架平整度,測試線盤剎車。與此同時,高空技工登塔,安裝朝天滑車,重要跨越處看護人員到位,現場指揮報話機聯絡,保證通信暢通。
無人機由C2大號側垂直起飛,越過C2鐵塔后,飛向C1鐵塔。C2高空技工將迪尼瑪繩放入朝天滑車中。C1塔位高空技工傳報無人機對塔的距離和高度,無人機操作人員根據傳報信息調整無人機飛行狀態,無人機越過C1鐵塔時高度不小于5 m。在無人機越過C1鐵塔15 m左右時,通知操作人員拋繩,沙袋落在C1小號側,高空技工將迪尼瑪繩放入朝天滑車中。無人機返航,完成牽放工作。
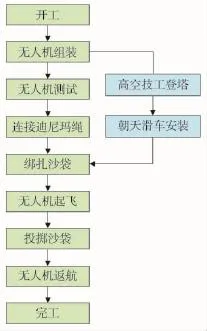
圖3 放線施工流程
其余區段采取相同方法牽放,引繩在C2和C4連接、導通,完成整個區段引繩牽放工作。
3 實用效果
四旋翼及六旋翼無人機由于載重輕、牽引力小、抗風能力弱,只能牽放直徑小、重量輕的韓國絲,無法牽放Φ6 mm迪尼瑪繩。十八旋翼無人機通過增加旋翼數量、增加電池組數量、減小機身重量等方法,彌補了多旋翼無人機動力不足的缺點,成功牽放Φ6 mm迪尼瑪繩,優點為:減少韓國絲循環迪尼瑪繩工序;避免了韓國絲易斷缺點,提高施工安全性;無人機抗風能力提高,可適應多種氣象工況;牽放速度提高,牽放一檔迪尼瑪繩(約500 m)僅需3 min左右。
4 結語
十八旋翼無人機牽放Φ6 mm迪尼瑪繩,解決了韓國絲易斷的問題,保證了施工安全;減少了一道引繩替代循環工序,提高了施工效率;十八旋翼無人機自身穩定性好、抗風能力強,擴大了初級引繩牽放的可適應工況,拓展了施工廣度。十八旋翼無人機牽放Φ6 mm迪尼瑪繩施工工藝能夠適應山區、平原、林地等多種地區,可廣泛推廣應用。
[1]SDJJS 2—1987超高壓架空輸電線路張力架線施工工藝導則[S].
[2]DL 5009.2—2013電力建設安全工作規程(架空送電線路部分)[S].
[3]中國民用航空局.民用無人駕駛航空器系統駕駛員管理暫行規定[R].2013.
[4]齊書浩.微型四旋翼飛行器總體設計及其運動控制[D].上海:上海交通大學,2013.
[5]葉竟成.飛行器遠程遙控監測系統設計[D].西安:西安電子科技大學,2012.
The Technology for Laying Large Diameter Dyneema Pulling Rope Using 18-Rotor UAV
ZHU Chuanbao,QIN Xiangjun,WANG Yantao,ZHU Jianhui,CAO Chuanwen
(Shandong Electric Power T&T Engineering Company,Jinan 250022,China)
With the development of the tension stringing,the technology for laying primary pulling rope using multi-rotor UAV has been applied more and more widely.However,the existing technology just can be used to lay the South Korea rope with low safety factors.With the purpose of finding the way to strengthen the tractive effort,cruising ability,and bad weather resistance ability of UAV,the 18-rotor UAV is presented to lay Φ6 mm Dyneema pulling rope successfully.The method can promote the efficiency and safety during the process of laying primary pulling ropes.Engineering applications prove that the method can take references for improving the utility ratio of mechanization construction.
18-rotor;UAV;laying;Dyneema rope
TM752
B
1007-9904(2016)12-0036-03
2016-06-05
朱傳寶(1978),男,從事輸電線路施工管理工作;
秦向軍(1986),男,從事輸電線路施工工作;
王延濤(1981),男,從事輸電線路施工工作;
朱建輝(1964),男,從事輸電線路施工工作;
曹傳文(1985),男,從事輸電線路施工工作。
猜你喜歡
建材發展導向(2022年18期)2022-09-22 07:13:20
建材發展導向(2022年12期)2022-08-19 02:33:10
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年22期)2022-01-18 06:12:46
建材發展導向(2021年19期)2021-12-06 03:20:50
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年12期)2021-07-22 08:06:58
建材發展導向(2021年9期)2021-07-16 07:11:36
上海建材(2017年4期)2017-10-16 01:33:34
中國房地產業(2016年2期)2016-03-01 01:25:48
