揚(yáng)聲器作為慣性作動(dòng)器的結(jié)構(gòu)振動(dòng)主動(dòng)控制研究*
2016-02-07 05:18:28毛崎波
組合機(jī)床與自動(dòng)化加工技術(shù) 2016年12期
劉 健,毛崎波
(南昌航空大學(xué) 飛行器工程學(xué)院,南昌 330063)
揚(yáng)聲器作為慣性作動(dòng)器的結(jié)構(gòu)振動(dòng)主動(dòng)控制研究*
劉 健,毛崎波
(南昌航空大學(xué) 飛行器工程學(xué)院,南昌 330063)
目前揚(yáng)聲器主要用于聲場激勵(lì),文章將揚(yáng)聲器作為慣性作動(dòng)器應(yīng)用于結(jié)構(gòu)振動(dòng)主動(dòng)控制中,實(shí)現(xiàn)結(jié)構(gòu)振動(dòng)控制,并將其應(yīng)用到實(shí)際工程應(yīng)用中。建立并研究基于揚(yáng)聲器的慣性作動(dòng)器模型,設(shè)計(jì)振動(dòng)主動(dòng)控制實(shí)驗(yàn)系統(tǒng),采用直接速度反饋控制策略進(jìn)行實(shí)驗(yàn),理論計(jì)算和實(shí)驗(yàn)結(jié)果表明:揚(yáng)聲器作為慣性作動(dòng)器實(shí)現(xiàn)結(jié)構(gòu)振動(dòng)控制是可行的。
揚(yáng)聲器;慣性作動(dòng)器;直接速度反饋;結(jié)構(gòu)振動(dòng);振動(dòng)主動(dòng)控制
0 引言
振動(dòng)主動(dòng)控制在航空航天、土木建筑、車輛工程及機(jī)械工程等領(lǐng)域得到了廣泛應(yīng)用,有眾多學(xué)者對(duì)振動(dòng)主動(dòng)控制進(jìn)行了大量研究[1-4]。振動(dòng)主動(dòng)控制具有控制效果較好、適應(yīng)性較強(qiáng)、控制精度高、控制頻域?qū)挕⒃诓捎梅答伩刂茣r(shí)能適應(yīng)隨機(jī)的外界干擾和系統(tǒng)參數(shù)的不確定性、以及對(duì)被控對(duì)象的結(jié)構(gòu)改動(dòng)不大等優(yōu)點(diǎn),是一種很有前途的振動(dòng)控制方法。因此,對(duì)該技術(shù)進(jìn)行深入研究有著重要的理論和實(shí)際意義[5-6]。
作動(dòng)器是實(shí)施振動(dòng)主動(dòng)控制的關(guān)鍵部件,其作用是按照確定的控制規(guī)律對(duì)控制對(duì)象施加控制力。本文針對(duì)目前常用的壓電薄膜作動(dòng)器、壓電陶瓷作動(dòng)器、磁致伸縮作動(dòng)器、慣性作動(dòng)器等[7-9]價(jià)格相對(duì)昂貴、型號(hào)較少等缺點(diǎn),采用揚(yáng)聲器代替慣性作動(dòng)器作為控制系統(tǒng)中的控制器。揚(yáng)聲器具有結(jié)構(gòu)簡單牢固、成本低、耐用性強(qiáng)等特點(diǎn)。
建立基于揚(yáng)聲器的慣性作動(dòng)器模型,對(duì)揚(yáng)聲器模型在結(jié)構(gòu)振動(dòng)主動(dòng)控制中進(jìn)行可行性分析,應(yīng)用揚(yáng)聲器、功率放大器、加速度傳感器、積分電路、信號(hào)發(fā)生器等建立振動(dòng)主動(dòng)控制實(shí)驗(yàn)系統(tǒng),采用單頻率信號(hào)激勵(lì)懸臂梁振動(dòng)進(jìn)行實(shí)驗(yàn),通過實(shí)驗(yàn)驗(yàn)證揚(yáng)聲器作為慣性作動(dòng)器在結(jié)構(gòu)振動(dòng)主動(dòng)控制中的可行性。
1 基于揚(yáng)聲器的慣性作動(dòng)器模型
采用的揚(yáng)聲器為動(dòng)圈式揚(yáng)聲器,又稱電動(dòng)式揚(yáng)聲器,本文所用的揚(yáng)聲器物理參數(shù)如表1所示,結(jié)構(gòu)簡圖如圖1所示,在紙盆表面連接一個(gè)連桿,把紙盆的振動(dòng)通過連桿以力的形式傳遞到振動(dòng)結(jié)構(gòu)表面,用于振動(dòng)主動(dòng)控制。
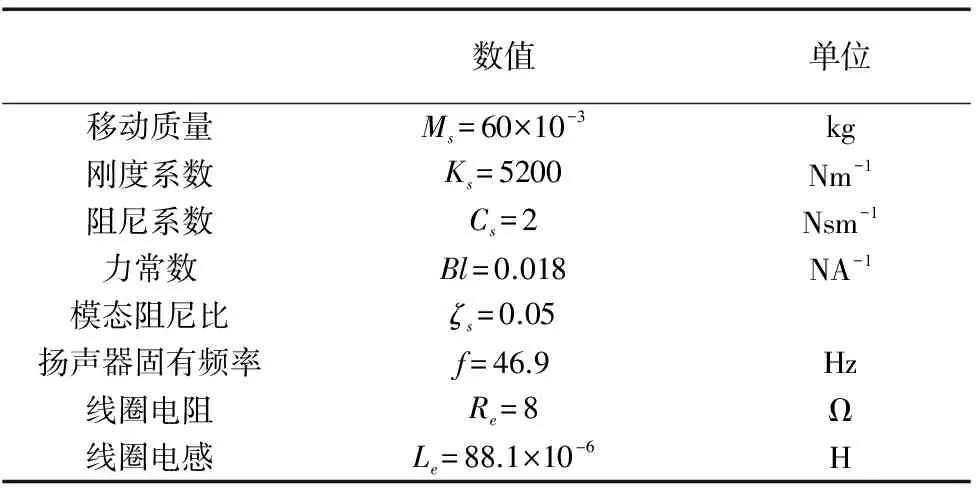
表1 揚(yáng)聲器物理參數(shù)

圖1 揚(yáng)聲器結(jié)構(gòu)簡圖
把基于揚(yáng)聲器的慣性作動(dòng)器看作一個(gè)質(zhì)量彈簧阻尼系統(tǒng)[10],如圖2所示,其動(dòng)力學(xué)方程為:
MsX··+CsX·+KsX=Bl·I
(1)
其中Ms、Rs、Ks分別是揚(yáng)聲器的移動(dòng)質(zhì)量、阻尼、剛度,Bl為力常數(shù),I為輸入電流。
從圖2可以發(fā)現(xiàn),揚(yáng)聲器傳遞給結(jié)構(gòu)的力Fc:
Fc=-CsX·-KsX+Bl·I
(2)
揚(yáng)聲器的電磁感應(yīng)表達(dá)式為:
LeI ·+ReI=Vin-Bl·X·
(3)
其中,L 為電感,R為電阻,Vin為輸入到音圈的電壓。
聯(lián)立方程(1)(2)(3)式,使用阻抗形式表示可得輸入電壓Vin和輸出力Fc之間的傳遞函數(shù):
FcVin=BlZeZmZm+Zs+(Bl)2Ze
(4)
其中:Ze=Re+jωLe;Zm=jωMs;Zs=Cs+Ksjω。
由式(4)可以得出揚(yáng)聲器系統(tǒng)的頻率響應(yīng)函數(shù)曲線如圖3所示。

圖2 揚(yáng)聲器力學(xué)模型
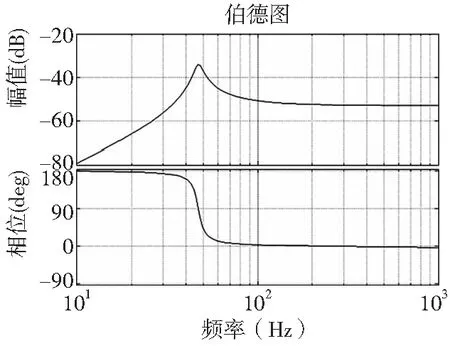
圖3 慣性作動(dòng)器系統(tǒng)頻率響應(yīng)函數(shù)
根據(jù)揚(yáng)聲器系統(tǒng)的頻率響應(yīng)曲線可知,被控物體的振動(dòng)頻率應(yīng)當(dāng)高于揚(yáng)聲器的固有頻率,否則在控制中可能會(huì)出現(xiàn)失穩(wěn)。將揚(yáng)聲器安裝在一個(gè)單自由度振動(dòng)結(jié)構(gòu)中,固有頻率為ωa大于揚(yáng)聲器的固有頻率ωs,整個(gè)系統(tǒng)可以看作是一個(gè)二自由度振動(dòng)系統(tǒng),其力學(xué)模型如圖4所示,結(jié)合圖2揚(yáng)聲器力學(xué)模型,在外加干擾力Fd的作用下,系統(tǒng)動(dòng)力學(xué)方程為:
MsX··+Cs(X·-X·a)+Ks(X-Xa)=-Fc
(5)
MaX··a+CaX·a+KaXa-Cs(X·-X·a)-Ks(X-Xa)=Fd+Fc
(6)
采用直接速度反饋控制[11]:
Vin=-GainX·
(7)
式中Gain表示增益。
把式(4)和式(7)代入式(5)、(6),整理后可得:
Ma0
0MsX··a
X··+Ca+Cs+α-Cs
-Cs-αCsX·a
X·+
Ka+Ks-Ks
-KsKsXa
X=1
0 Fd
(8)
其中α為反饋系數(shù):
α=-Gain·BlZeZmZm+Zs+(Bl)2Ze
(9)
由上式可以看出控制效果主要由反饋系數(shù)決定,圖5給出了不同反饋系數(shù)下的控制效果,由圖可以看出反饋系數(shù)越大控制效果越好,但是在揚(yáng)聲器固有頻率處會(huì)出現(xiàn)共振,共振峰值隨反饋系數(shù)的增大而增大。所以,控制的時(shí)候要選取適當(dāng)?shù)脑鲆鎭磉_(dá)到最好的控制效果。
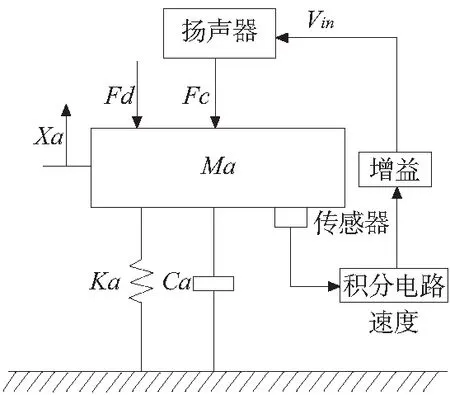
圖4 揚(yáng)聲器安裝在單自由度振動(dòng)結(jié)構(gòu)上的力學(xué)模型
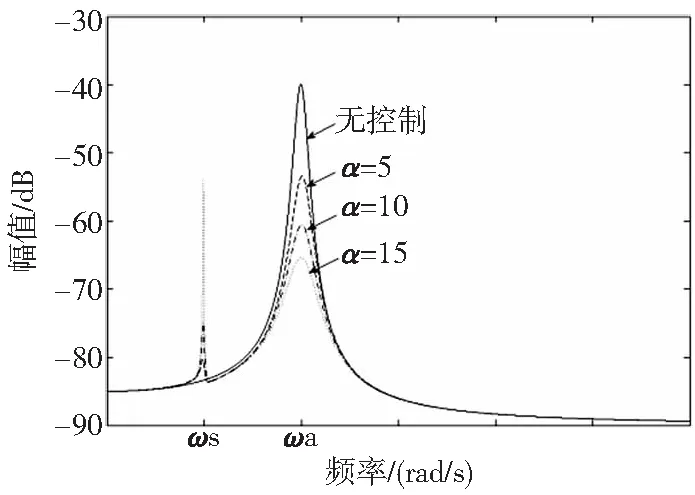
實(shí)線—控制前;虛線—不同反饋系數(shù)下控制圖5 系統(tǒng)頻率響應(yīng)
2 基于揚(yáng)聲器的振動(dòng)主動(dòng)控制系統(tǒng)
為了進(jìn)一步驗(yàn)證本文方法,我們進(jìn)行了實(shí)驗(yàn)驗(yàn)證。主動(dòng)控制系統(tǒng)實(shí)驗(yàn)示意圖如圖6所示,我們通過揚(yáng)聲器(物理參數(shù)如表1所示)設(shè)計(jì)了兩個(gè)慣性作動(dòng)器,其中一個(gè)作為激勵(lì)源,另一個(gè)作為控制源。首先通過阻抗頭測量了揚(yáng)聲器輸入電壓與輸出力之間的頻率響應(yīng)函數(shù),如圖7所示。可以發(fā)現(xiàn)揚(yáng)聲器的固有頻率在46.9Hz,這與理論分析結(jié)果(見圖3)相符合,注意到揚(yáng)聲器的幅值大于90Hz時(shí)基本保存不變,并且相位保持在0°左右,所以該揚(yáng)聲器的有效控制頻率范圍為90~500Hz。實(shí)驗(yàn)測得控制系統(tǒng)的Nyquist圖如圖8所示,由圖可以看出整個(gè)圖形位于點(diǎn)(-1,0)的右側(cè),當(dāng)增益不斷增大時(shí),系統(tǒng)將會(huì)出現(xiàn)失穩(wěn)。
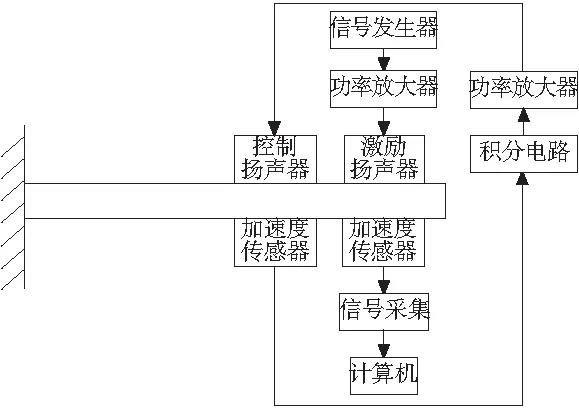
(a)實(shí)驗(yàn)框圖
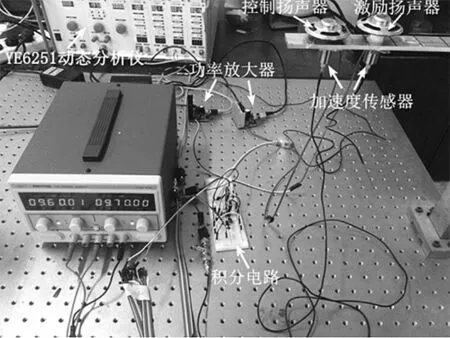
(b)實(shí)驗(yàn)實(shí)物圖圖6 主動(dòng)控制系統(tǒng)實(shí)驗(yàn)示意圖
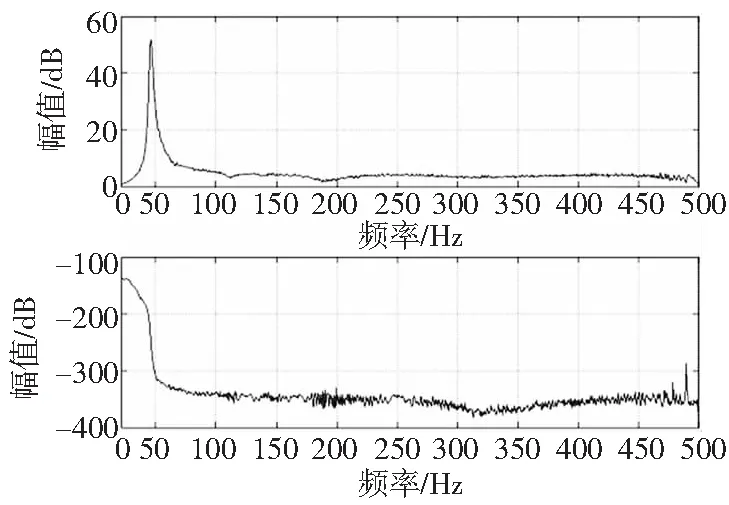
圖7 揚(yáng)聲器的幅相特性曲線
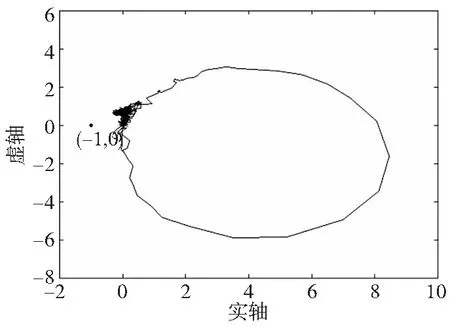
圖8 控制系統(tǒng)Nyquist圖
實(shí)驗(yàn)選用第二階固有頻率為203Hz的懸臂梁作為控制對(duì)象,通過信號(hào)發(fā)生器產(chǎn)生擾動(dòng)信號(hào),擾動(dòng)信號(hào)采用單頻激勵(lì),該信號(hào)經(jīng)過功率放大器放大后輸入到激振揚(yáng)聲器中,激振揚(yáng)聲器運(yùn)動(dòng)激勵(lì)懸臂梁振動(dòng),采用CA-YD-186壓電式加速度傳感器采集懸臂梁的振動(dòng)信號(hào),運(yùn)用直接速度反饋控制策略,將采集到的加速度振動(dòng)信號(hào)通過積分電路,對(duì)加速度信號(hào)進(jìn)行處理后通過功率放大器反饋到控制揚(yáng)聲器中,控制揚(yáng)聲器對(duì)懸臂梁振動(dòng)進(jìn)行控制,通過YE6251動(dòng)態(tài)分析儀采集信號(hào)至計(jì)算機(jī)。
圖9給出了控制點(diǎn)的加速度時(shí)域響應(yīng)曲線,可以看出,當(dāng)控制開始后振動(dòng)很快衰減,控制達(dá)到穩(wěn)定后振動(dòng)水平降低了70%。圖10給出了系統(tǒng)頻率響應(yīng)曲線,實(shí)線表示控制前的頻率響應(yīng),虛線表示控制后的頻率響應(yīng),由圖可以看出,峰值明顯下降,但是在低頻時(shí)出現(xiàn)了擾動(dòng),這與理論分析結(jié)果(見圖5)相符合。

圖9 單頻激勵(lì)控制點(diǎn)的加速度響應(yīng)
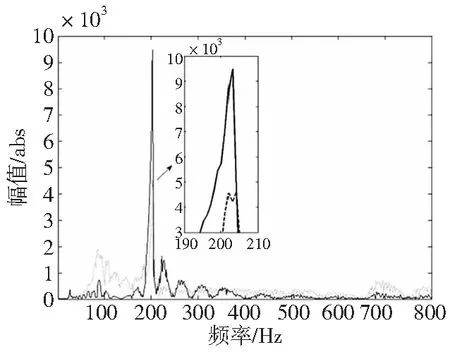
實(shí)線—控制前;虛線—控制后圖10 系統(tǒng)頻率響應(yīng)
3 結(jié)論
對(duì)懸臂梁單自由度結(jié)構(gòu),以測量點(diǎn)的加速度響應(yīng)為控制目標(biāo),運(yùn)用直接速度反饋控制,采用揚(yáng)聲器作為慣性作動(dòng)器對(duì)結(jié)構(gòu)振動(dòng)主動(dòng)控制進(jìn)行了實(shí)驗(yàn)研究。實(shí)驗(yàn)結(jié)果表明,單頻激勵(lì)的振動(dòng)控制效果達(dá)70%,且控制響應(yīng)時(shí)間快,控制效果明顯,這說明以揚(yáng)聲器作為慣性作動(dòng)器應(yīng)用于結(jié)構(gòu)主動(dòng)控制中是可行的,揚(yáng)聲器可代替現(xiàn)在常用的作動(dòng)器應(yīng)用于結(jié)構(gòu)振動(dòng)主動(dòng)控制中,實(shí)現(xiàn)振動(dòng)主動(dòng)控制。
[1] N Fallah, M Ebrahimnejad. Active control of building structures using piezoelectric actuators[J]. Applied Soft Computing Journal,2013,13(1):326-339.
[2] 趙衛(wèi)強(qiáng),劉永賢,魯墨武.某航空發(fā)動(dòng)機(jī)壓氣機(jī)輪盤振動(dòng)特性研究[J]. 組合機(jī)床與自動(dòng)化加工技術(shù),2009(2):24-26.
[3] Shin Changjoo,Hong Chinsuk,Jeong Weui Bong. Active vibration control of beams using filtered-velocity feedback controllers with moment pair actuators [J]. Journal of Sound and Vibration,2013,332(12):2910-2922.
[4] S Kapuria,M Yaqoob Yasin.Active vi-bration control of smart plates using direction-al actuation and sensing capability of piezoele-ctric composites[J]. Acta Mechanica,2013,224(6):1185-1199.
[5] 陳榮梅.基于電磁作動(dòng)器的懸臂梁振動(dòng)主動(dòng)控制系統(tǒng)模型確認(rèn)研究[D].南京:南京航空航天大學(xué), 2014.
[6] 張定. 基于電磁作動(dòng)器的柔性體振動(dòng)主動(dòng)控制仿真及試驗(yàn)研究[D].南京:南京航空航天大學(xué),2013.
[7] 王震. 基于慣性作動(dòng)器的管路系統(tǒng)振動(dòng)主動(dòng)控制研究[D].北京:中國艦船研究院,2014.
[8] Stanislaw Pietrzko, Qibo Mao. Noise reduction in a duct using passive/semi-active shunt loudspeakers[C]. 16th International Congress on Sound and Vibration 2009 (ICSV16),2009.
[9] G Zhaoa,N Alujevic′a,B Depraetereb,et al.Experimental study on active structural acoustic control of rotating machinery using rotating piezo-based inertial actuators[J]. Journal of Sound and Vibration,2015,15-30.
[10] Mao Q, Pietrzko S. Control of Noise and Structural Vibration [M]. Springer, 2013.
[11] J Rohlfinga, P Gardoniob, D J Thompsona.Comparison of decentralized velocity feedback control for thin homogeneous and stiff sandwich panels using electrodynamic proof-mass actuators [J]. Journal of Sound and Vibration, 2011,330(5):843-867.
(編輯 李秀敏)
Research on Active Vibration Control by Using Loudspeakers as Inertial Actuators
LIU Jian,MAO Qi-bo
(School of Aircraft Engineering, Nanchang Hangkong University, Nanchang 330063, China)
The loudspeaker is normally used for sound field excitation. In this paper, the loudspeaker is used as inertial actuator for active vibration control approach. And this method can be applied to engineering applications. First, the model of the inertial actuators based on the loudspeaker is established. Then the control performance of the proposed inertial actuator is presented. To further investigate the proposed method, design of active vibration control experiment system, and use direct velocity feedback control strategy for the experiment. The theoretical calculation and experimental results show that the loudspeakers can be used as inertial actuators for active vibration control approach.
loudspeaker; inertial actuators; direct velocity feedback; structural vibration; active vibration control
1001-2265(2016)12-0085-03
10.13462/j.cnki.mmtamt.2016.12.023
2016-03-01;
2016-04-09
國家自然基金項(xiàng)目(51265037,11464031);航空科學(xué)基金項(xiàng)目(2015ZA56002);江西省高等學(xué)校科技落地計(jì)劃資助項(xiàng)目(KJLD12075);江西省研究生創(chuàng)新基金項(xiàng)目(YC2015S326)
劉健(1992—),男,江西贛州人,南昌航空大學(xué)碩士研究生,研究方向?yàn)檎駝?dòng)主動(dòng)控制,(E-mail)841458386@qq.com。
TH166;TG659
A
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年11期)2018-08-04 03:25:42
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25