一種新型橋梁檢測車舉升機(jī)構(gòu)的設(shè)計及優(yōu)化
2016-02-11 08:48:13高一佳
專用汽車 2016年12期
高一佳
陜西保利特種車制造有限公司 陜西西安 710200
一種新型橋梁檢測車舉升機(jī)構(gòu)的設(shè)計及優(yōu)化
高一佳
陜西保利特種車制造有限公司 陜西西安 710200
橋梁檢測車的舉升油缸通常沿長對角線方向安裝,在使用過程中存在初始階段油壓過高和臂架顫抖的問題。為解決這些問題,使用ADAMS軟件中的DOE和Optimization工具對該機(jī)構(gòu)進(jìn)行了分析和研究,尋找該舉升機(jī)構(gòu)的最佳布置形式。研究結(jié)果表明,驅(qū)動油缸沿短對角線方向安裝時,所需驅(qū)動力比原結(jié)構(gòu)顯著降低。因此,提出了一種新的沿短對角線方向安裝的舉升機(jī)構(gòu)布置方案,為橋梁檢測車的設(shè)計提供了新思路。
ADAMS 橋梁檢測車 舉升機(jī)構(gòu) 設(shè)計研究 結(jié)構(gòu)優(yōu)化
1 前言
橋梁檢測車是一種用于快速檢測和維修橋梁跨下部結(jié)構(gòu)的專用車輛。其主要工作裝置——臂架舉升機(jī)構(gòu),是一種變異四連桿機(jī)構(gòu),由車架平臺、左連桿、右連桿、臂架和驅(qū)動油缸五個部件組成,布置形式如圖1所示。該機(jī)構(gòu)在實際使用過程中存在初始階段油壓過高和臂架顫抖的問題,因此本文試圖通過使用動力學(xué)分析軟件ADAMS中的設(shè)計研究(DOE)和優(yōu)化(Optimization)工具[1],尋找該舉升機(jī)構(gòu)的最佳結(jié)構(gòu)形式。
2 油缸布置點設(shè)計研究
通過對臂架舉升機(jī)構(gòu)的初步分析,假定∠α為左連桿與地面的夾角,假定∠β為油缸與地面的夾角,如圖1所示。按照兩夾角的相對關(guān)系可將該機(jī)構(gòu)分為3種類型:
a. ∠α >∠β時,連桿夾角大于油缸夾角,如圖2所示。油缸收縮驅(qū)動連桿旋轉(zhuǎn),臂架上升,隨著臂架上升油缸驅(qū)動力逐漸減小。
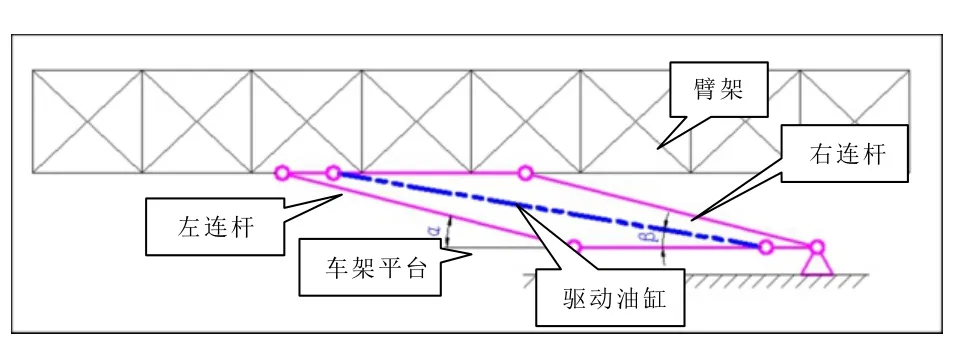
圖1 橋檢車臂架舉升機(jī)構(gòu)簡圖
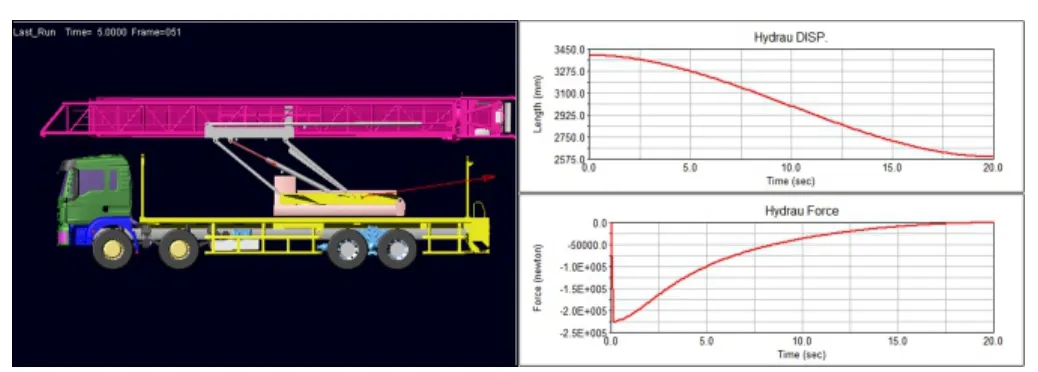
圖2 ∠α>∠β 時油缸驅(qū)動力曲線圖
b. ∠α =∠β 時,連桿夾角等于油缸夾角,如圖3所示。此時整個機(jī)構(gòu)約束不足,油缸無法驅(qū)動連桿和臂架運動。
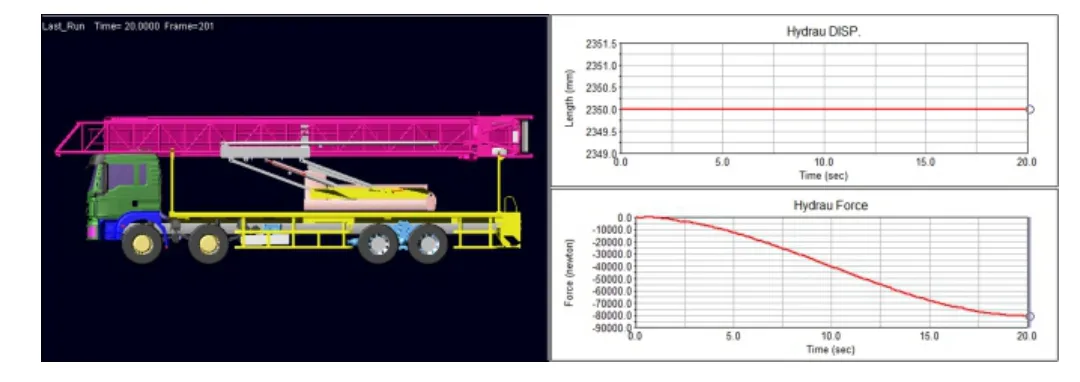
圖3 ∠α =∠β 時油缸驅(qū)動力曲線圖
c. ∠α <∠β 時,連桿夾角小于油缸夾角,如圖4所示。油缸伸長驅(qū)動連桿旋轉(zhuǎn),臂架上升,隨著臂架上升油缸驅(qū)動力逐漸減小。
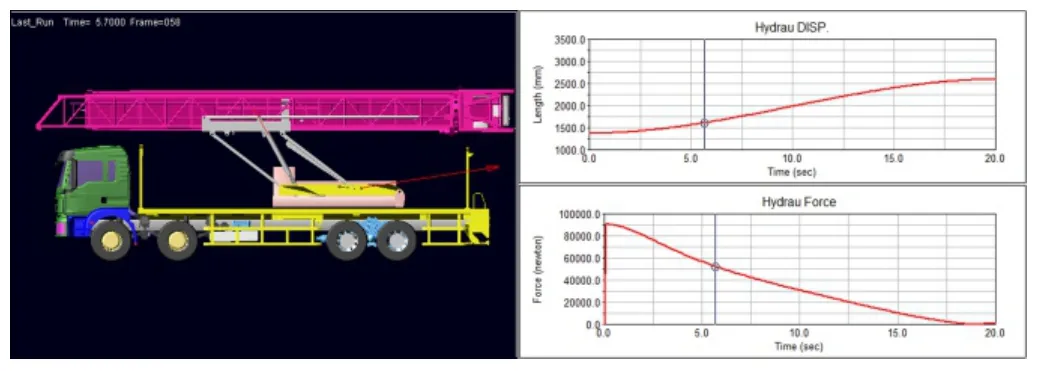
圖4 ∠α <∠β 時油缸驅(qū)動力曲線圖
由上述分析可知,油缸安裝位置改變會影響油缸驅(qū)動力的大小。本文的優(yōu)化目標(biāo)是尋求最合理的油缸安裝位置,使得該機(jī)構(gòu)在整個運動過程中受力最小。
因此,取油缸的上下支點為設(shè)計變量,分別定義為DV_X和DV_Y。上支點變量DV_X初始值為0,變化范圍為0~1 100 mm,下支點變量DV_Y初始值為0,變化范圍同樣為0~1 100 mm,如圖5所示。圖中紅色區(qū)域為油缸位置的設(shè)計空間。
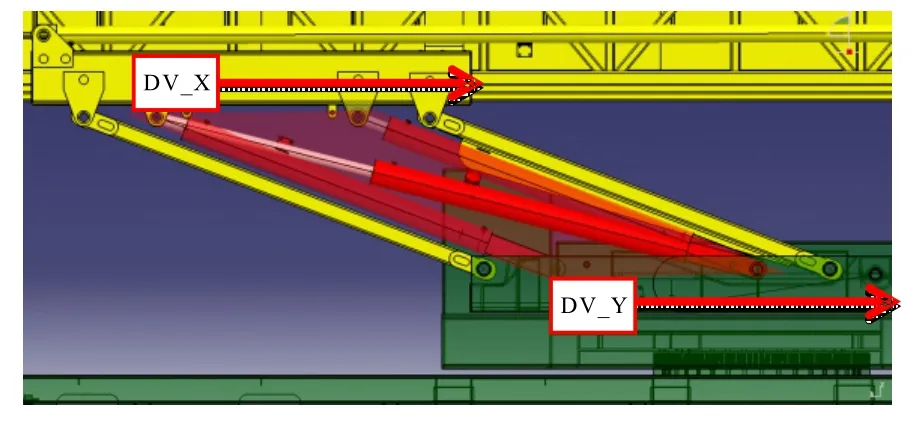
圖5 上下支點變量設(shè)計空間示意圖
運用正交試驗方法,以DV_X和DV_Y為正交變量,對油缸驅(qū)動力進(jìn)行設(shè)計研究(DOE),尋找使驅(qū)動力最小化的DV_X和DV_Y值。該優(yōu)化問題可表述如表1。

表1 分析需用的材料參數(shù)表
該優(yōu)化問題的優(yōu)化目標(biāo)是使驅(qū)動油缸的驅(qū)動力最小,同時還要滿足油缸的上支點(DV_X)和下支點(DV_Y)不超過左右連桿的范圍(0,1 100)的約束條件,并且油缸不能和左右連桿平行(DV_X≠DV_Y),如圖5所示。通過對400余組不同油缸安裝位置的模型進(jìn)行仿真,得到如表2所示的油缸驅(qū)動力數(shù)據(jù)表,正值表示油缸輸出推力,負(fù)值表示油缸輸出拉力。
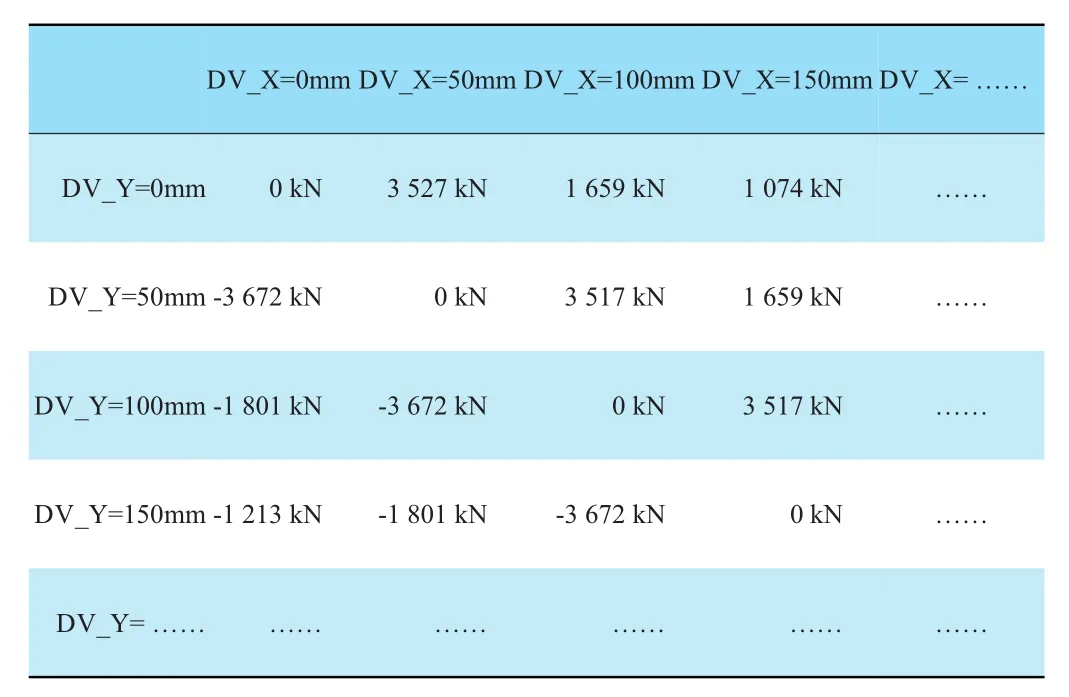
表2 舉升油缸驅(qū)動力DOE結(jié)果統(tǒng)計表(部分)
使用MATLAB軟件將表2中數(shù)據(jù)可視化,得到如圖6所示的油缸驅(qū)動力在全設(shè)計空間內(nèi)的三維分布圖。從圖6中可看出:
a. 在∠α >∠β的區(qū)域內(nèi),上支點移動量小于下支點,模型處于圖2所示狀態(tài)。此時油缸輸出拉力,且驅(qū)動力隨著下支點DV_Y的變大而單調(diào)減小,如圖7(a)所示。
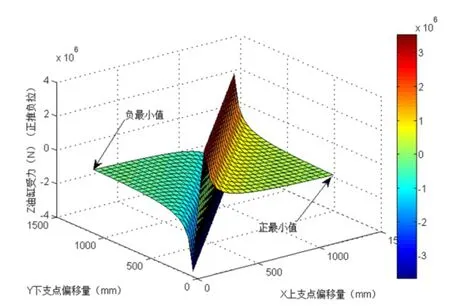
圖6 油缸驅(qū)動力在全設(shè)計空間內(nèi)的三維分布圖
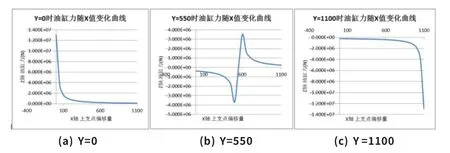
圖7 油缸驅(qū)動力變化曲線
由圖可知,當(dāng)DV_X =0, DV_Y =1 100 mm時,油缸拉力達(dá)到極小值-213 kN。此時獲得了第一個最優(yōu)方案,系統(tǒng)機(jī)構(gòu)簡圖如圖8 (a)所示。油缸位于平行四邊形的長對角線位置,因此稱該方案為長對角線方案。
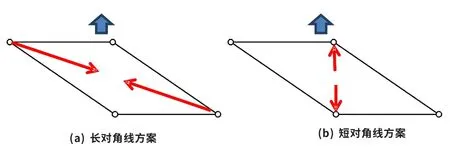
圖8 長對角線方案和短對角線方案機(jī)構(gòu)示意圖
b. 在∠α =∠β區(qū)域內(nèi),上支點移動量等于下支點,模型處于圖3所示狀態(tài)。此時的油缸拉力和推力都趨于無窮大,運動方案在此區(qū)域附近無解。
c. 在∠α <∠β區(qū)域內(nèi),上支點移動量大于下支點,模型處于圖4所示狀態(tài)。此時油缸輸出推力,且驅(qū)動力隨著下支點DV_Y的變大而單調(diào)增大,如圖7(c)所示。
當(dāng)DV_X =1 100 mm,DV_Y =0時,油缸推力達(dá)到極小值90.55 kN。此時獲得了第二個最佳方案,系統(tǒng)機(jī)構(gòu)簡圖如圖8(b)所示。油缸位于平行四邊形的短對角線位置,因此稱該方案為短對角線方案。
兩個對角線方案如圖8所示,為了比較這兩個方案的優(yōu)劣,需要對橋梁檢測車的完整作業(yè)過程進(jìn)行仿真分析。
3 方案比選及機(jī)構(gòu)優(yōu)化
首先,對長對角線方案進(jìn)行全工況動力學(xué)仿真分析,包括臂架舉升、一回轉(zhuǎn)平臺旋轉(zhuǎn)、臂架翻轉(zhuǎn)、臂架伸縮和臂架二次下降等工況,分析結(jié)果如圖9所示。該結(jié)果表明在臂架舉升階段驅(qū)動油缸受力最大,圖中紅色曲線表示舉升油缸力,藍(lán)色曲線表示翻轉(zhuǎn)油缸力。可以看出,在第30 s(即臂架開始翻轉(zhuǎn))時,舉升油缸力由拉力變向為推力,并隨著翻轉(zhuǎn)角度增大逐漸變大,在翻轉(zhuǎn)完成時,達(dá)到推力極大值64.6 kN。
然后,對短對角線方案進(jìn)行同樣工況的動力學(xué)分析,分析結(jié)果如圖10所示。圖中紅色曲線表示舉升油缸受力,藍(lán)色曲線表示翻轉(zhuǎn)油缸受力。從圖中可看出,在第30 s(即臂架開始翻轉(zhuǎn))時,舉升油缸力由推力變向為拉力,并隨著翻轉(zhuǎn)角度增大逐漸變大,在翻轉(zhuǎn)完成時,達(dá)到推力極大值-90.55 kN。
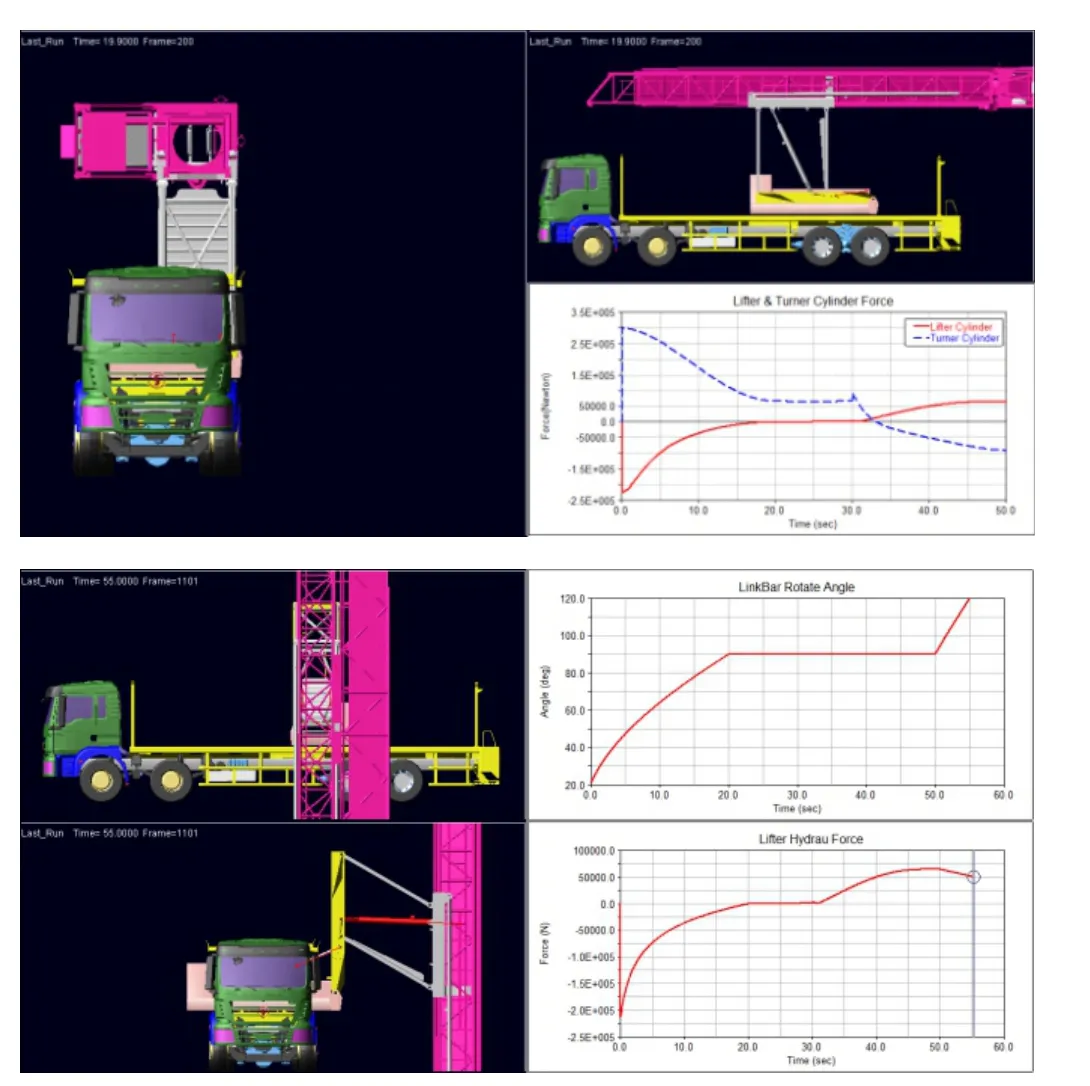
圖9 長對角線方案全工況動力學(xué)仿真動畫
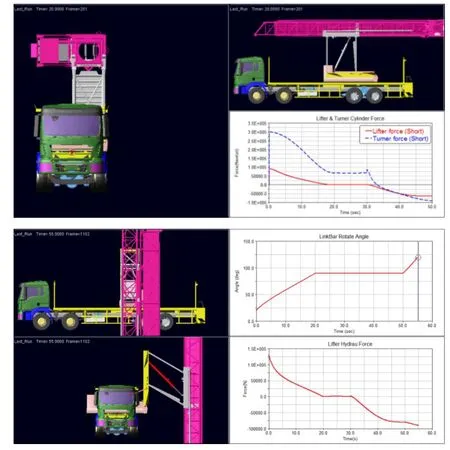
圖10 短對角線方案全工況動力學(xué)仿真動畫
最后,對上述兩個方案的分析結(jié)果進(jìn)行比較,發(fā)現(xiàn)兩方案中翻轉(zhuǎn)油缸驅(qū)動力基本沒有變化,但兩方案的舉升油缸驅(qū)動力截然不同,如圖11所示。紅色曲線表示長對角線方案,藍(lán)色曲線表示短對角線方案。
由圖11可知,長對角線方案中,舉升過程油缸力由最大拉力-213 kN漸變?yōu)? N,翻轉(zhuǎn)過程油缸力由0 N漸變?yōu)樽畲笸屏?4.6 kN。
短對角線方案中,舉升過程油缸力由最大推力90.5 kN漸變?yōu)? N,翻轉(zhuǎn)過程油缸力由0 N漸變?yōu)樽畲罄?64.6 kN。
選取兩個方案的第0 s和第50 s的驅(qū)動力數(shù)據(jù),進(jìn)行比較,對比結(jié)果如表3所示。
Design and Optimization of A New Lifting Mechanism of Bridge Detecting Vehicle
GAO Yi-jia
Hydraulic cylinder of bridge detecting vehicle's trapezoidal lifting mechanism is usually installed along long axle direction. DOE and Optimization tools of ADAMS software is applied to analysis this mechanism. The result indicates that cylinder force of short diagonal installation scheme is much less than long diagonal installation scheme. So a new type of trapezoidal lifting mechanism is proposed initiatively.
ADAMS; bridge detecting vehicle; new lifting mechanism;DOE;Optimization
U469.6.03
A
1004-0226(2016)12-0104-04
高一佳,男,1982年生,工程師,現(xiàn)從事軍用重型卡車和裝甲車輛結(jié)構(gòu)強(qiáng)度分析、結(jié)構(gòu)優(yōu)化及動力學(xué)分析等工作。