基于偽譜同倫算法的編隊(duì)飛行任務(wù)設(shè)計(jì)研究
2016-02-15 08:53:36岳曉奎
上海航天 2016年6期
關(guān)鍵詞:優(yōu)化
岳曉奎,段 遜
(1.西北工業(yè)大學(xué) 航天學(xué)院,陜西 西安 710072; 2.西北工業(yè)大學(xué) 國(guó)家飛行動(dòng)力學(xué)重點(diǎn)實(shí)驗(yàn)室,陜西 西安 710072)
基于偽譜同倫算法的編隊(duì)飛行任務(wù)設(shè)計(jì)研究
岳曉奎1、2,段 遜1、2
(1.西北工業(yè)大學(xué) 航天學(xué)院,陜西 西安 710072; 2.西北工業(yè)大學(xué) 國(guó)家飛行動(dòng)力學(xué)重點(diǎn)實(shí)驗(yàn)室,陜西 西安 710072)
針對(duì)編隊(duì)飛行中多個(gè)從星飛行任務(wù)設(shè)計(jì)問題,研究了用偽譜同倫算法對(duì)其進(jìn)行優(yōu)化的方法,以獲得小推力時(shí)的最省燃料轉(zhuǎn)移軌道。將無(wú)推力的轉(zhuǎn)移軌道作為初始軌道,用偽譜法對(duì)其進(jìn)行優(yōu)化,使其轉(zhuǎn)移軌道能量最優(yōu),所得軌道可作為初值,解決了同倫算法對(duì)初值敏感的問題。再用同倫算法進(jìn)行優(yōu)化,降低了間接法求解最優(yōu)控制問題的難度,得到最省燃料軌道,解決了求解Bang-Bang控制產(chǎn)生的不光滑性。對(duì)運(yùn)行于高度400 km近地圓軌道上3顆完全相同的從星算例進(jìn)行了求解,構(gòu)建軌道跟飛/領(lǐng)飛構(gòu)型的最省燃料軌道。結(jié)果表明:偽譜同倫算法能較大幅度節(jié)省燃料,對(duì)求解編隊(duì)飛行從星轉(zhuǎn)移軌道設(shè)計(jì)可行且有效。
編隊(duì)飛行; 軌道轉(zhuǎn)移; 偽譜同倫算法; Bang-Bang控制; 偽譜法; 同倫法; 最省燃料; 小推力
0 引言
衛(wèi)星編隊(duì)是指由物理上分離但彼此相互合作從而共同實(shí)現(xiàn)同一空間任務(wù)的一系列衛(wèi)星(特別是小衛(wèi)星)所組成的空間系統(tǒng)[1]。編隊(duì)飛行中的每顆衛(wèi)星在共同保持一個(gè)特定的隊(duì)形時(shí),還受到引力場(chǎng)(如太陽(yáng)、各大行星、月球等)的影響。在編隊(duì)飛行過程中,每顆衛(wèi)星相互聯(lián)系、協(xié)同工作,共同完成任務(wù)。與單顆衛(wèi)星相比,多顆衛(wèi)星組成的編隊(duì)具可提高系統(tǒng)性能和降低成本等優(yōu)勢(shì)。衛(wèi)星編隊(duì)飛行是現(xiàn)代小衛(wèi)星一種新的應(yīng)用模式,小衛(wèi)星的重大缺陷是能攜帶的燃料較少,因此規(guī)劃燃料最優(yōu)軌道成為編隊(duì)飛行中亟待解決的問題。當(dāng)空間任務(wù)發(fā)生變更,衛(wèi)星編隊(duì)構(gòu)型需相應(yīng)變化,在原構(gòu)型的基礎(chǔ)上建立新的相對(duì)運(yùn)動(dòng)形式是衛(wèi)星編隊(duì)飛行的重大問題。軌跡優(yōu)化在空間飛行探索中不斷發(fā)展,其理論是求解編隊(duì)飛行構(gòu)型重構(gòu)的基礎(chǔ)。當(dāng)前,推進(jìn)方式主要有大小推力兩種形式。小衛(wèi)星因攜帶燃料的較少,采取小推力方式居多,因此研究者在不斷研究小推力的優(yōu)化方法。在已報(bào)道的研究中,求解優(yōu)化軌跡的數(shù)值方法主要有間接法、直接法和混合法三類[2-3]。直接法的要點(diǎn)是將控制變量或狀態(tài)變量離散化,將原問題轉(zhuǎn)換成一個(gè)非線性規(guī)劃問題,其典型算法有偽譜法,其不足主要是未引入一階最優(yōu)必要性條件,不能保證得到的解是最優(yōu)解。間接法是基于變分法或龐特里亞金極大值原理等最優(yōu)控制理論,將小推力軌跡優(yōu)化問題轉(zhuǎn)化為最優(yōu)控制問題的方法,如同倫算法,其最大缺點(diǎn)是初值很難猜測(cè),且對(duì)初值及其敏感。因同倫法與偽譜法有很強(qiáng)的互補(bǔ)特性,組合應(yīng)用既可解決初值敏感問題又能化解燃料最優(yōu)問題中Bang-Bang控制引起的不光滑性困難,從而獲得編隊(duì)飛行中從星的燃料最優(yōu)軌跡。為此,本文對(duì)一種基于偽譜同倫算法的編隊(duì)飛行構(gòu)型重構(gòu)任務(wù)設(shè)計(jì)方法進(jìn)行了研究。先基于大推力下的C-W方程,以獲得一條大推力轉(zhuǎn)移初始軌道,再用偽譜法,以性能最優(yōu)為優(yōu)化指標(biāo)進(jìn)行優(yōu)化(因其無(wú)法解決Bang-Bang控制的不光滑性,故無(wú)法得到最省燃料軌道),以獲得一條平滑的控制曲線和小推力轉(zhuǎn)移軌道。最后,以基于偽譜法得到的小推力轉(zhuǎn)移軌道為初值再進(jìn)行同倫算法優(yōu)化,以獲得最省燃料的小推力軌道和控制曲線。
1 問題描述
本文假設(shè)一顆主星攜帶3顆完全相同的從星運(yùn)行于高度400 km的近地圓軌道,用這3顆從星構(gòu)建同軌道跟飛/領(lǐng)飛構(gòu)型,從而使燃料最省[4]。
為描述從星與主星(主星運(yùn)行于圓軌道)間的相對(duì)運(yùn)動(dòng),引入HCW坐標(biāo)系,此命名僅針對(duì)后文中的Hill-Clohessy-Wiltshire(HCW)方程:原點(diǎn)O位于主星;Ox軸由地心指向主星;Oy軸在主星軌道面內(nèi)與Ox軸垂直,沿運(yùn)動(dòng)方向?yàn)檎籓z軸垂直于軌道平面,與Ox、Oy軸構(gòu)成右手坐標(biāo)系,如圖1所示。本文的運(yùn)動(dòng)狀態(tài)變量均在HCW坐標(biāo)系中表示。
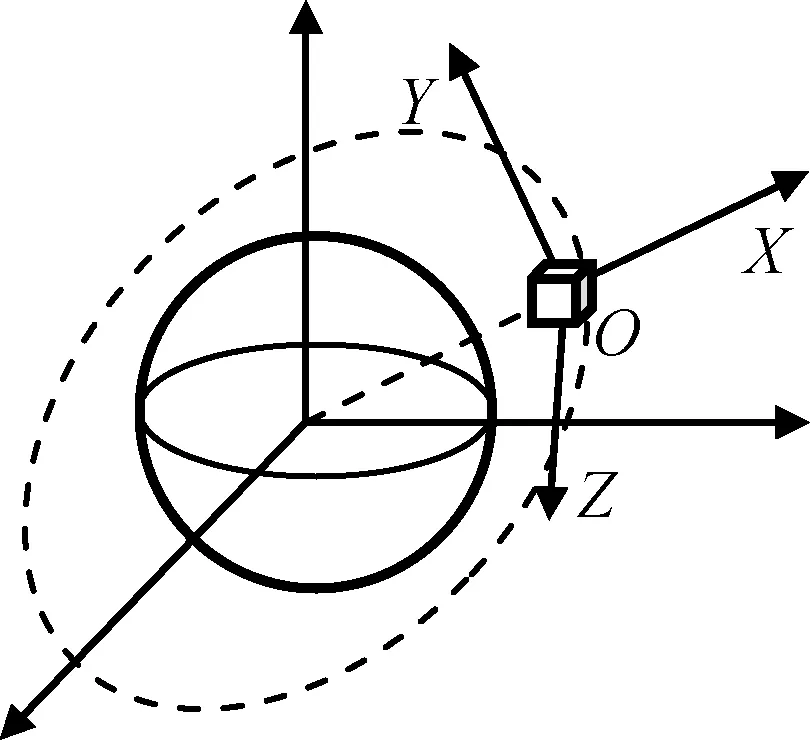
圖1 HCW坐標(biāo)系Fig.1 HCW coordinate system
從星相對(duì)主星的線性化相對(duì)運(yùn)動(dòng)方程(HCW方程)可表示為
(1)
式中:x,y,z為從星相對(duì)主星的位置;n為主星的圓軌道角速度;Fx,F(xiàn)y,F(xiàn)z分別為施加于從星上的推力的坐標(biāo)分量;m為從星的質(zhì)量。考慮從星在軌道機(jī)動(dòng)過程消耗的燃料質(zhì)量相對(duì)其本身的質(zhì)量來(lái)說(shuō)相對(duì)較小,故認(rèn)為從星的質(zhì)量始終保持不變,式(1)中的m恒取為從星的初始質(zhì)量50 kg。

(2)
式中:ge為地球海平面的重力加速度;F為推力幅值,且F=[(Fx)2+(Fy)2+(FZ)2]0.5;Isp為推進(jìn)比沖,且Isp=1 000 s;Δt為連續(xù)推力的持續(xù)時(shí)間。
當(dāng)Fx=Fy=Fz=0(即不施加任何推力)時(shí),給定從星(相對(duì)主星)在初始時(shí)刻(t=0)的位置和速度為

HCW方程的解為
(3)
式中:n為主星的圓軌道角速度。將式(3)化為常值項(xiàng)、長(zhǎng)期項(xiàng)與周期項(xiàng)之和的形式
(4)
式中:nt+φ為從星的相位差;

由式(4)可知:有界運(yùn)動(dòng)(無(wú)長(zhǎng)期漂移項(xiàng))的存在條件為xc=0,即
(5)
當(dāng)b=0,c=0時(shí),不存在周期項(xiàng)運(yùn)動(dòng),此時(shí)的構(gòu)型最簡(jiǎn)單,為同軌道領(lǐng)飛/跟飛相對(duì)軌跡,有
(6)
當(dāng)yc>0時(shí),稱為領(lǐng)飛;當(dāng)yc<0時(shí),稱為跟飛。3顆從星同軌道領(lǐng)飛/跟飛的目標(biāo)構(gòu)型如圖2所示。圖中:yc=-4,4,8 km。
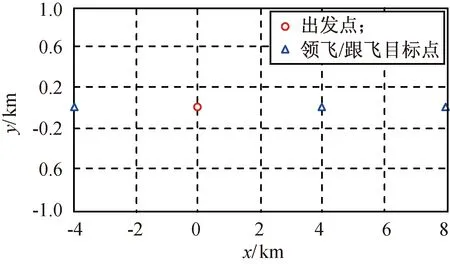
圖2 領(lǐng)飛/跟飛構(gòu)型Fig.2 Fly/flight configuration
2 優(yōu)化流程
2.1 偽譜法
偽譜法屬于直接法中的配點(diǎn)法。直接法是將一個(gè)連續(xù)系統(tǒng)求解最優(yōu)控制問題中的控制變量或狀態(tài)變量離散化,從而進(jìn)行求解非線性規(guī)劃問題,最終獲得原最優(yōu)問題的較精確解。直接法可分為配點(diǎn)法和直接打靶法。直接打靶法一般是將控制變量進(jìn)行離散化,而配點(diǎn)法一般將控制變量和狀態(tài)變量均離散化,包括求積型配點(diǎn)法和偽譜法。直接法的優(yōu)勢(shì)是:不用推導(dǎo)最優(yōu)性一階必要條件,易建立最優(yōu)軌道的非線性優(yōu)化模型;對(duì)初值軌跡精度要求不高,無(wú)需猜測(cè)協(xié)態(tài)變量的初值,對(duì)優(yōu)化參數(shù)的收斂域?qū)挘椎玫绞諗拷狻F淙秉c(diǎn)是:不提供協(xié)態(tài)變量信息,不能保證獲得的非線性規(guī)劃的最優(yōu)解是原最優(yōu)控制問題的解;易收斂至某一個(gè)局部解,而非全局最優(yōu)解[5-6]。
與其它配點(diǎn)法相比,偽譜法的最大差別是用數(shù)值微分方法近似其中的導(dǎo)數(shù)項(xiàng)(使用Lagrange插值全局近似,不基于有限差分的局部近似),從而得到節(jié)點(diǎn)上的離散動(dòng)力學(xué)方程(即殘值表達(dá)式)[7-8]。
在一般的最優(yōu)控制問題中,令狀態(tài)變量x(t)∈Rn,控制變量u(t)∈Rn,初始時(shí)間t0,終止時(shí)間tf,t∈[t0,tf]。確定最優(yōu)控制使性能指標(biāo)能最優(yōu),即

(7)
滿足以下條件:
a)狀態(tài)約束
(8)
b)路徑約束
C(x(t),u(t),t0,tf)≤0∈RC;
(9)
c)終端約束
φ(x(-1),t0,x(1),tf)=0∈Rq.
(10)
求解的步驟是采用龐特里亞金極小值原理求解其中的約束問題。直接法將連續(xù)最優(yōu)控制問題離散并轉(zhuǎn)為非線性規(guī)劃問題進(jìn)行求解。將歸一化時(shí)間區(qū)間τ∈[-1,1]用全局多項(xiàng)式插值逼近最優(yōu)控制問題的各變量,常用的全局多項(xiàng)式以拉格朗日多項(xiàng)式作為基函數(shù),在τ∈[-1,1]選取插值點(diǎn)定義插值多項(xiàng)式M個(gè),最優(yōu)控制問題中的狀態(tài)變量、控制變量可近似化為如下形式。
a)狀態(tài)變量

(11)
式中:x(τ)為M-1階多項(xiàng)式值;Li(τ)為拉格朗日多項(xiàng)式,且

(12)
b)控制變量

(13)
式中:U(τ)為離散點(diǎn)的控制量;
(14)
首先選取合適的多項(xiàng)式插值點(diǎn),進(jìn)而將最優(yōu)控制系統(tǒng)中的協(xié)態(tài)變量、控制變量和狀態(tài)變量等進(jìn)行多項(xiàng)式逼近。同時(shí),偽譜法選取合適的插值節(jié)點(diǎn)以對(duì)最優(yōu)能量指標(biāo)、約束條件、動(dòng)力學(xué)等進(jìn)行非線性約束。積分逼近的一般形式為
(15)
式中:τi為時(shí)間區(qū)間τ∈[-1,1]中M個(gè)離散的積分插值點(diǎn);ωi為積分權(quán)重(k=1,…,M)。合理的積分離散點(diǎn)分布,對(duì)積分逼近精度的影響至關(guān)重要。
常用的偽譜法有Legendre偽譜法、Gauss偽譜法、Radau偽譜法和Chebyshev偽譜法,見表1。總體來(lái)說(shuō),選取的配點(diǎn)方法不同會(huì)導(dǎo)致出現(xiàn)差異。本文使用Radau偽譜法,選擇的配點(diǎn)為L(zhǎng)egendre Gauss-Radau(LGR)[9]。
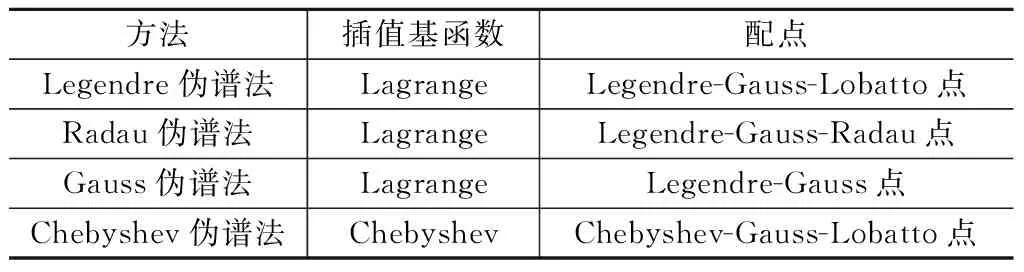
表1 偽譜法插值基函數(shù)及配點(diǎn)類型
LGR點(diǎn)是通過求取多項(xiàng)式
PM(τ)+PM-1(τ)
(16)
的零點(diǎn)獲得。此處:PM(τ),PM-1(τ)為對(duì)應(yīng)點(diǎn)上的值。積分權(quán)重為
(17)
本文采用小推力軌跡優(yōu)化模型為
(18)
(19)
狀態(tài)變量x=[rvm]T,系統(tǒng)模型可寫成緊湊形式

則小推力優(yōu)化問題以轉(zhuǎn)換成求解最優(yōu)軌跡x(t)和最優(yōu)控制u(t),滿足初、末狀態(tài)約束條件
(20)
和控制受限約束
‖u‖≤Tmax,
(21)
并使能量最優(yōu)指標(biāo)J取最小值,即
(22)
引入歸一化時(shí)間τ∈[-1,1],
(23)
則軌跡優(yōu)化方程可表示為
(24)
引入狀態(tài)變量的Lagrange插值多項(xiàng)式
(25)
式中:li(τ)為L(zhǎng)agrange插值函數(shù),包含LGR積分點(diǎn)和邊界節(jié)點(diǎn),且
(26)
狀態(tài)變量x(τ)的導(dǎo)數(shù)可通過微分矩陣近似得到,即
(27)
同樣,對(duì)控制變量引入Lagrange插值多項(xiàng)式
(28)
根據(jù)能量最優(yōu)性能指標(biāo),經(jīng)偽譜離散得

(29)
式中:N為選取點(diǎn)的個(gè)數(shù);ωk為L(zhǎng)GR積分點(diǎn)對(duì)應(yīng)的權(quán)函數(shù),且
(30)
2.2 同倫法
同倫法是間接法的一種。間接法是根據(jù)性能指標(biāo)從而推導(dǎo)得到滿足指標(biāo)的協(xié)態(tài)變量方程、控制量、橫截條件等,構(gòu)成系統(tǒng)微分方程建立兩點(diǎn)邊值問題,然后選用合適的迭代算法求解出滿足邊界條件約束、開關(guān)控制約束和橫截條件約束的最優(yōu)軌道。間接法的優(yōu)勢(shì)是:無(wú)需直接對(duì)性能指標(biāo)尋優(yōu),滿足最優(yōu)控制理論一階必要條件的收斂解即被認(rèn)為是最優(yōu)軌跡;優(yōu)化參數(shù)少,如協(xié)態(tài)變量初值較精準(zhǔn),就能快速得到收斂解。該法的缺點(diǎn)是:對(duì)協(xié)態(tài)變量初值非常敏感,其收斂域非常狹窄,一般很難直接得到收斂解,尤其對(duì)轉(zhuǎn)移軌道飛行時(shí)間長(zhǎng)、發(fā)動(dòng)機(jī)要多次開關(guān)切換的情況。
對(duì)間接法初值敏感問題,偽譜方法與同倫法有強(qiáng)互補(bǔ)特性。首先,偽譜法可有效求解能量最優(yōu)時(shí)的軌跡和估計(jì)協(xié)態(tài),其次同倫法可有效求解燃料最優(yōu)問題(由Bang-Bang控制不光滑性引起)[10-11]。
構(gòu)建同倫的方式通過對(duì)指標(biāo)添加一個(gè)二次攝動(dòng)項(xiàng)

(31)
此處,增加了一個(gè)正乘子λ0以便后續(xù)進(jìn)行歸一化。參數(shù)ε將燃料最優(yōu)準(zhǔn)則與能量最優(yōu)準(zhǔn)則關(guān)聯(lián),系數(shù)Fmax/(Ispg0)是為當(dāng)時(shí)與實(shí)際燃料消耗一致。
根據(jù)新的指標(biāo),哈密爾頓函數(shù)為

(32)
控制力大小為
(33)
式中:ε為同倫算法的參數(shù);ρ為選定的參數(shù),其開關(guān)函數(shù)形式為
(34)
3 仿真
3.1 從原點(diǎn)至(0,4,0) km點(diǎn)
a)初始軌道選取
假設(shè)從星從原點(diǎn)出發(fā)到達(dá)(0,4,0) km點(diǎn)處,在偽譜同倫法優(yōu)化前,需選取初始軌道。本文選取的初始軌道是在無(wú)任何推力時(shí),從星將根據(jù)HCW方程離開原點(diǎn)。如圖3所示。
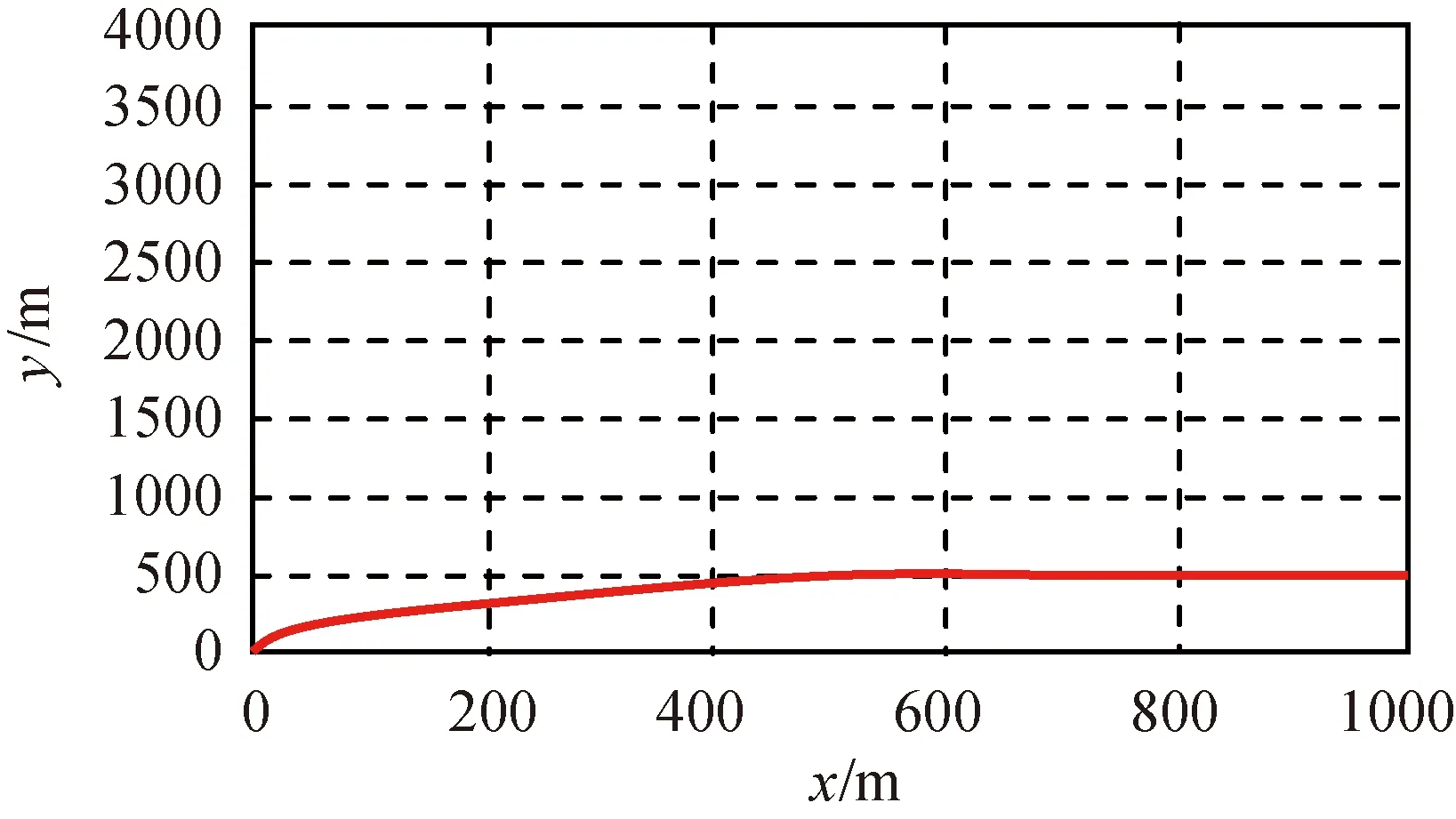
圖3 無(wú)推力時(shí)軌道轉(zhuǎn)移Fig.3 Orbit transfer without thrust
b)偽譜法優(yōu)化
因z平面內(nèi)無(wú)轉(zhuǎn)移,故只需研究x-y平面內(nèi)狀況。由圖3可知:軌道離目標(biāo)點(diǎn)(0,4) km點(diǎn)越來(lái)越遠(yuǎn)。故將這條初始軌道進(jìn)行偽譜法修正,從而得到轉(zhuǎn)移軌道和控制曲線分別如圖4、5所示)。
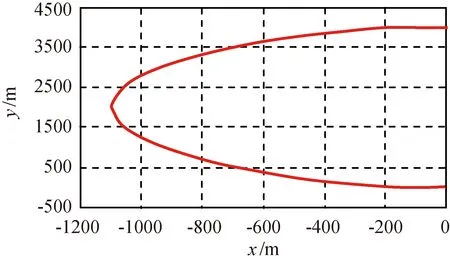
圖4 偽譜法優(yōu)化的軌道轉(zhuǎn)移Fig.4 Transfer orbit under optimization ofpseudo spectral method
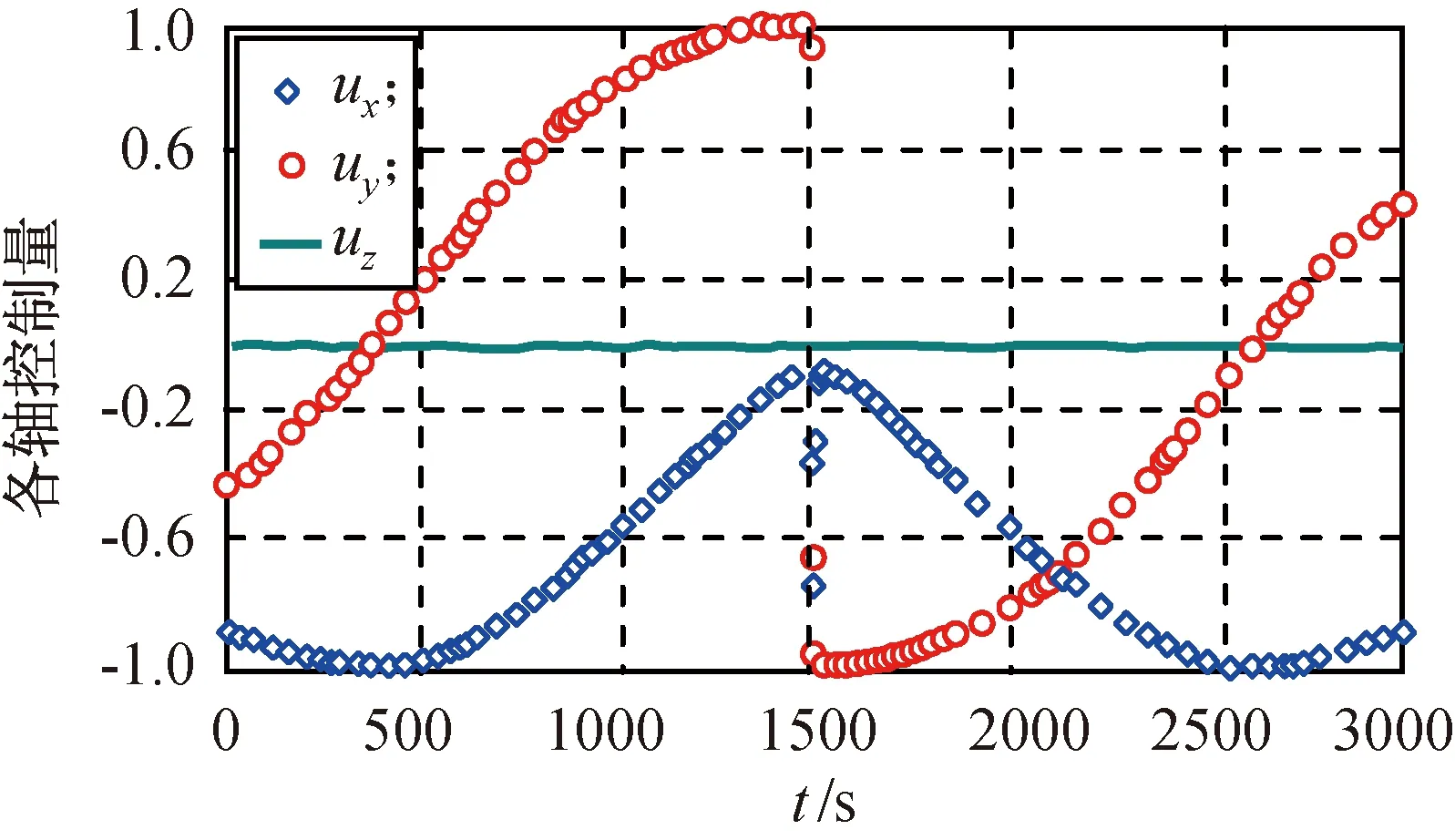
圖5 偽譜法優(yōu)化的各軸控制量Fig.5 Control of each axis under pseudo spectral method
由圖4可知:從星從原點(diǎn)飛到目標(biāo)點(diǎn)(0,4) km,完成了任務(wù)。圖5對(duì)應(yīng)的是x、y、z三軸上的控制量,可發(fā)現(xiàn)因z平面無(wú)轉(zhuǎn)移,故一直都是0,而x、y軸也隨之變化。
c)同倫法優(yōu)化
將偽譜法優(yōu)化得到的軌道再次作為初始軌道進(jìn)行同倫優(yōu)化,所得轉(zhuǎn)移軌道、各軸力大小及總力分別如圖6~8所示。
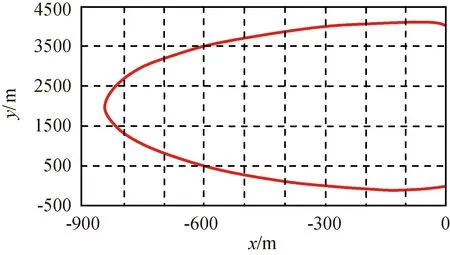
圖6 同倫法優(yōu)化的轉(zhuǎn)移軌道Fig.6 Transfer orbit under optimization ofhomotopy method
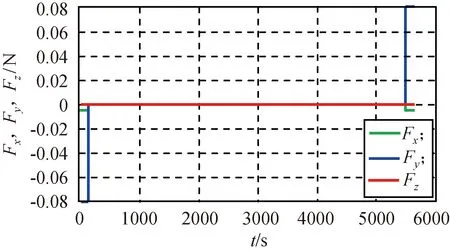
圖7 同倫法優(yōu)化各軸力大小Fig.7 Size of axial force under optimization ofhomotopy method
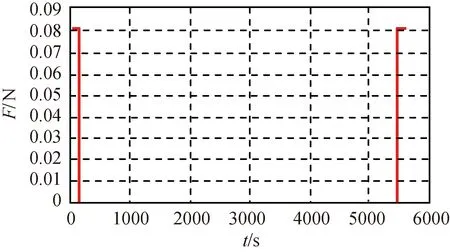
圖8 同倫法優(yōu)化的總力
圖6是由同倫算法得到的軌道。雖然與偽譜法的軌道相近,但仍有較大區(qū)別,如圖9所示。
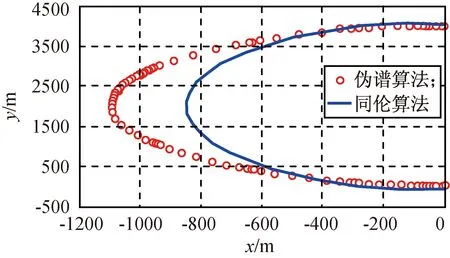
圖9 偽譜和同倫優(yōu)化的軌道Fig.9 Result by pseudo spectrum and homotopy optimization
由偽譜法和同倫法算得的軌道轉(zhuǎn)移時(shí)間與燃料消耗見表2。
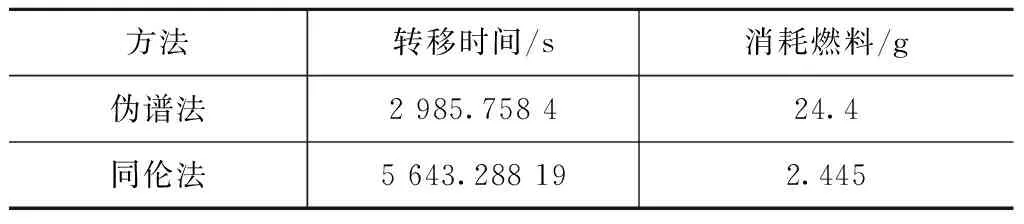
表2 偽譜軌道和同倫軌道比較(0,4) km
由表2可知:雖然轉(zhuǎn)移時(shí)間由較大增加,但燃料消耗減小了十分之一。分析原因有兩點(diǎn):首先偽譜法得到的是最優(yōu)能量的軌道并不是最省燃料的軌道(因其無(wú)法求解出最省燃料軌道);其次同倫法可解決由Bang-Bang控制產(chǎn)生的不光滑性,從而求得最省燃料軌道。本文方法較好地解決了解編隊(duì)飛行軌道轉(zhuǎn)移的燃料消耗及轉(zhuǎn)移問題。
3.2 從原點(diǎn)至(0,8,0) km點(diǎn)
偽譜法軌道及控制結(jié)果如圖10、11所示。經(jīng)同倫優(yōu)化得到的軌道轉(zhuǎn)移結(jié)果如圖12所示。偽譜法與同侖優(yōu)化法所得軌道比較如圖13所示。同侖優(yōu)化法的各軸力大小和總力分別如圖14、15所示。
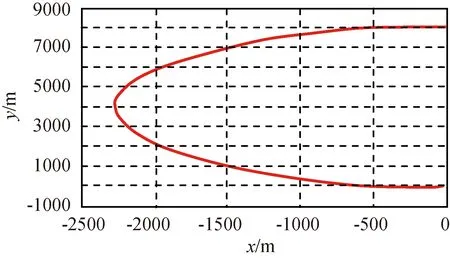
圖10 偽譜法優(yōu)化的軌道轉(zhuǎn)移Fig.10 Transfer orbit under optimization ofpseudo spectral method
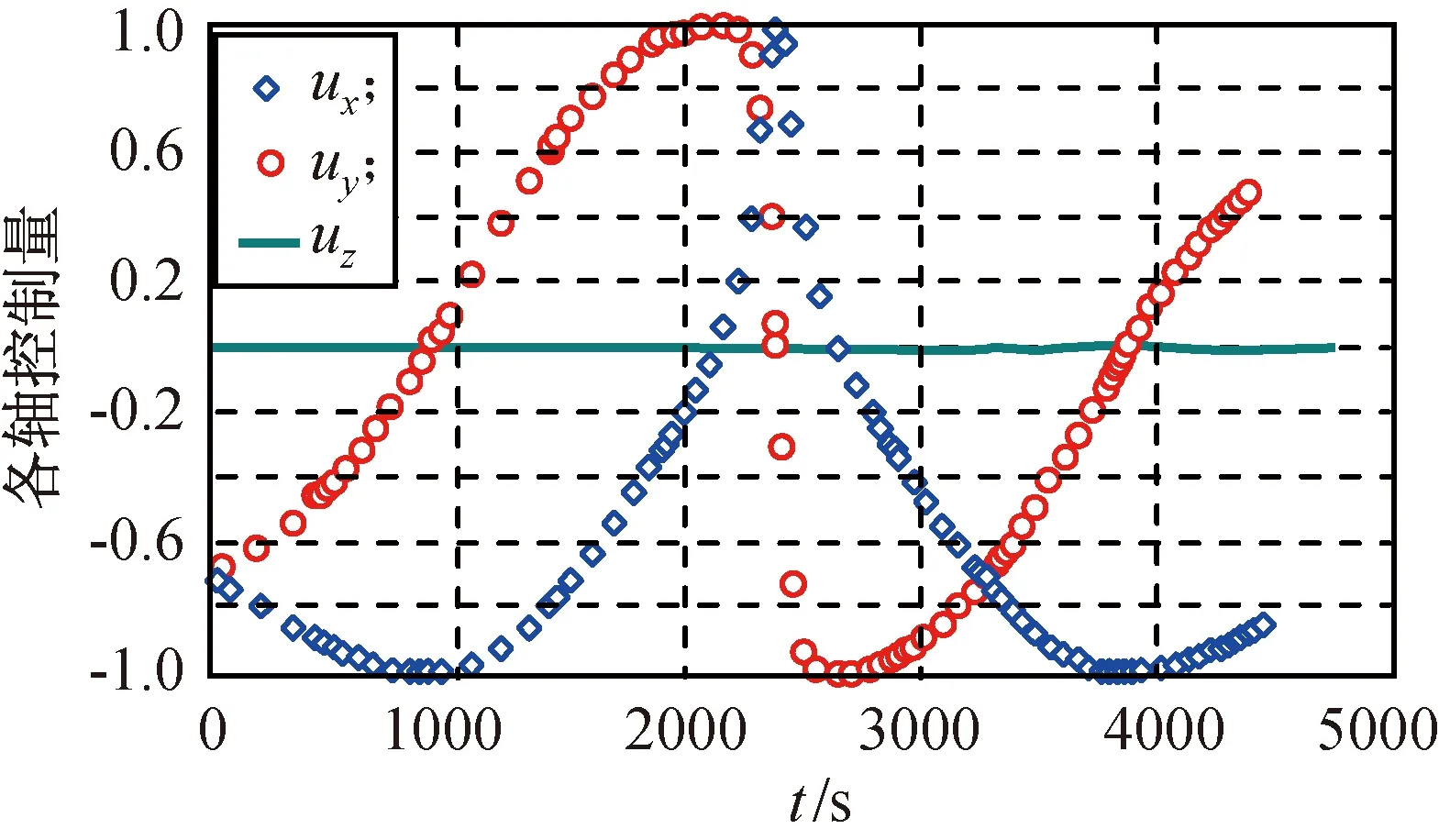
圖11 偽譜法優(yōu)化下的各軸控制量Fig.11 Control of each axis under pseudo spectral method
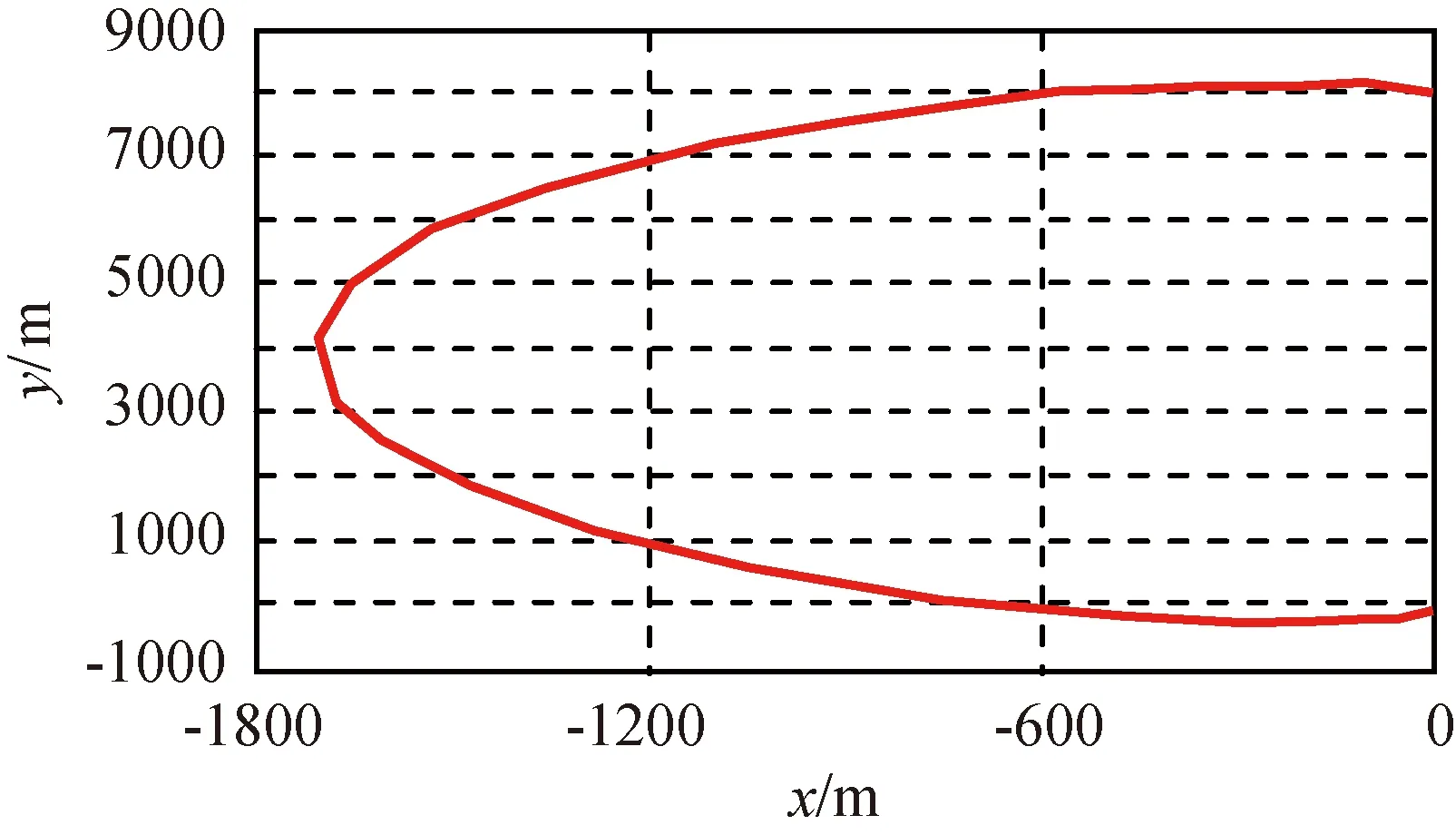
圖12 同倫法優(yōu)化的轉(zhuǎn)移軌道Fig.12 Transfer orbit under optimization ofhomotopy method
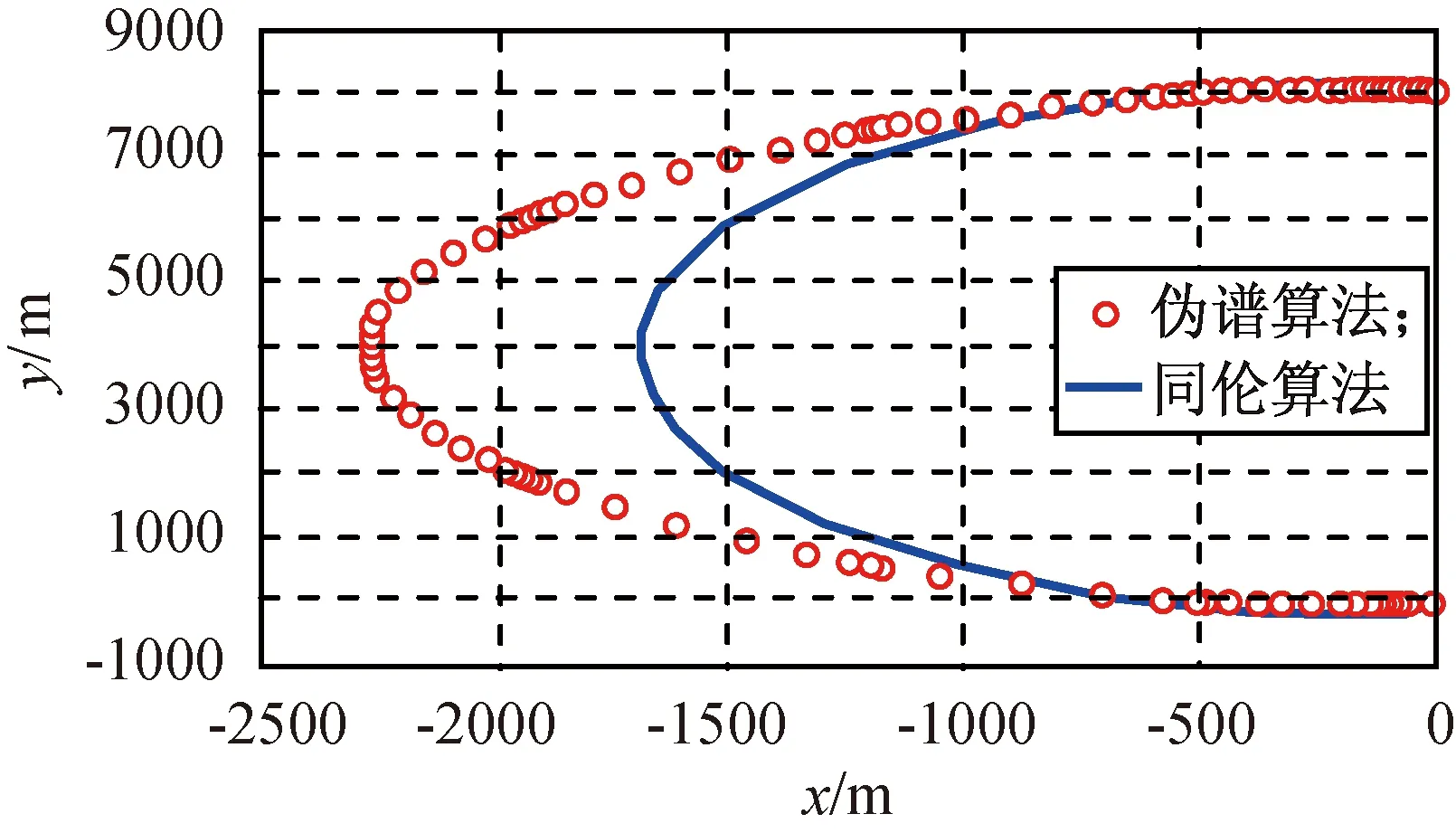
圖13 偽譜和同倫優(yōu)化軌道比較Fig.13 Comparison between pseudo spectrum andhomotopy optimization
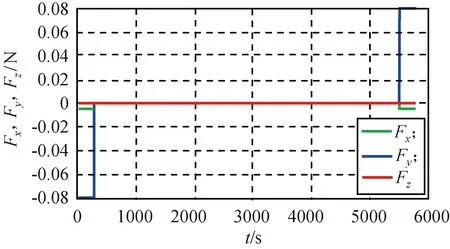
圖14 同倫法優(yōu)化的各軸力大小Fig.14 Size of axial force under optimization ofhomotopy method
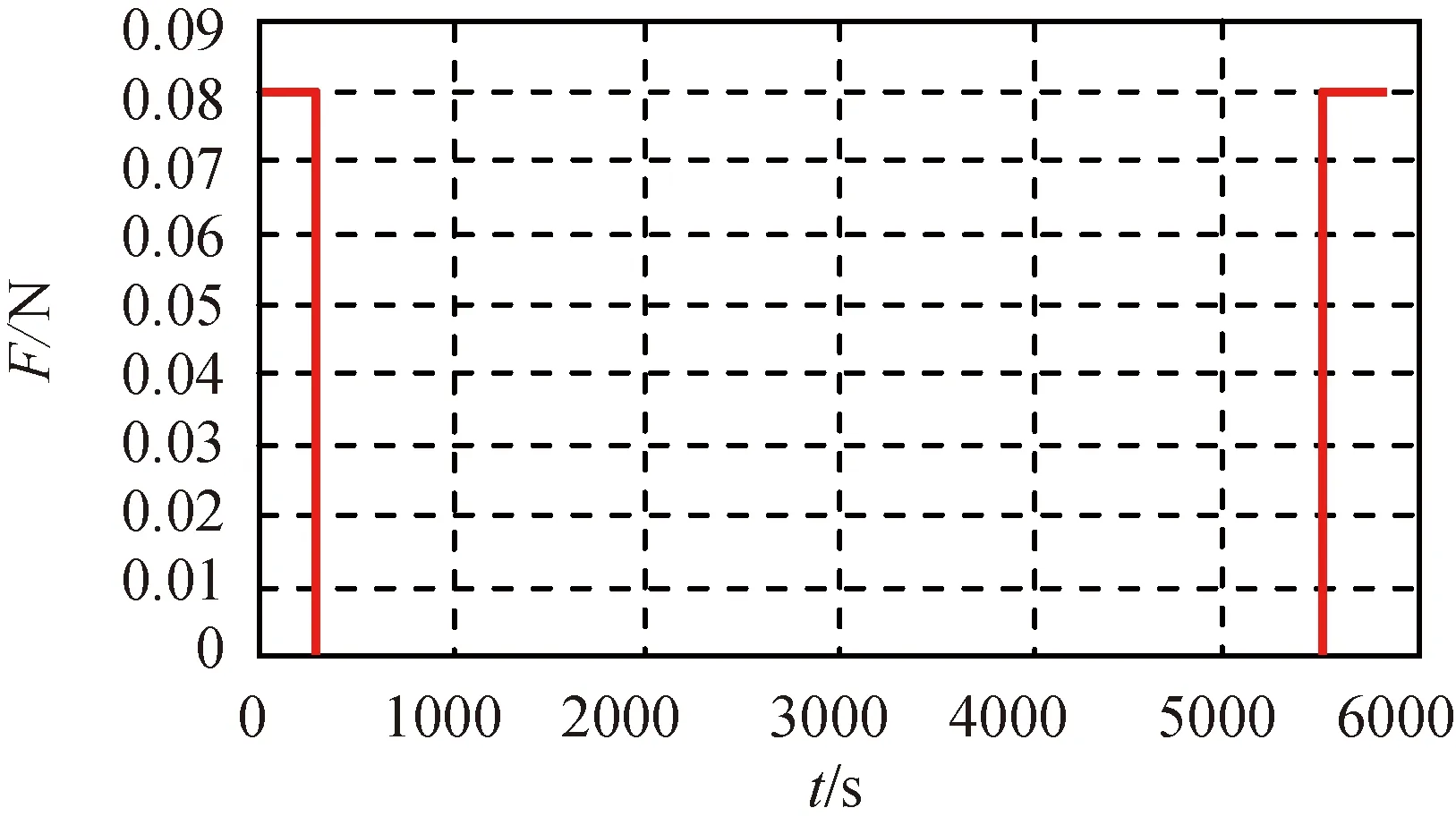
圖15 同倫法優(yōu)化的總力Fig.15 Total force under optimization of homotopy method
偽譜法和同倫法算得的軌道轉(zhuǎn)移時(shí)間和燃料消耗見表3。
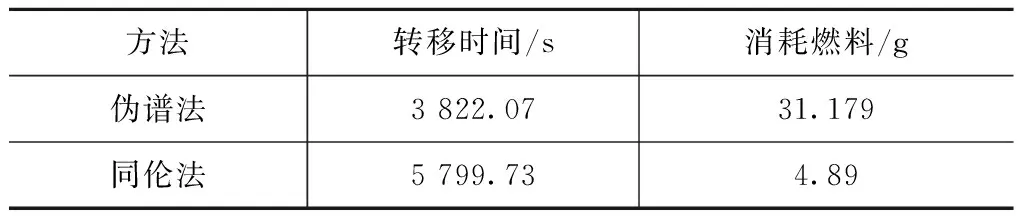
表3 偽譜軌道和同倫軌道對(duì)比(0,8) km
由表3可知:使用同倫法后,消耗的燃料同樣明顯減少,轉(zhuǎn)移時(shí)間也加長(zhǎng)。比較表2、3可知:轉(zhuǎn)移距離越長(zhǎng),用偽譜同倫法可節(jié)省的燃料越多,且較單獨(dú)使用偽譜法可節(jié)省大量燃料;采用偽譜同倫法到達(dá)(0,8) km點(diǎn)消耗的燃料正好是(0,4) km點(diǎn)的2倍。
3.3 從原點(diǎn)至(0,-4,0) km點(diǎn)
求解原點(diǎn)至(0,-4,0) km點(diǎn)的偽譜法軌道及控制結(jié)果如圖16、17所示。經(jīng)同倫優(yōu)化得到的軌道轉(zhuǎn)移結(jié)果如圖18所示。同侖優(yōu)化法的各軸力大小和總力分別如圖19、20所示。
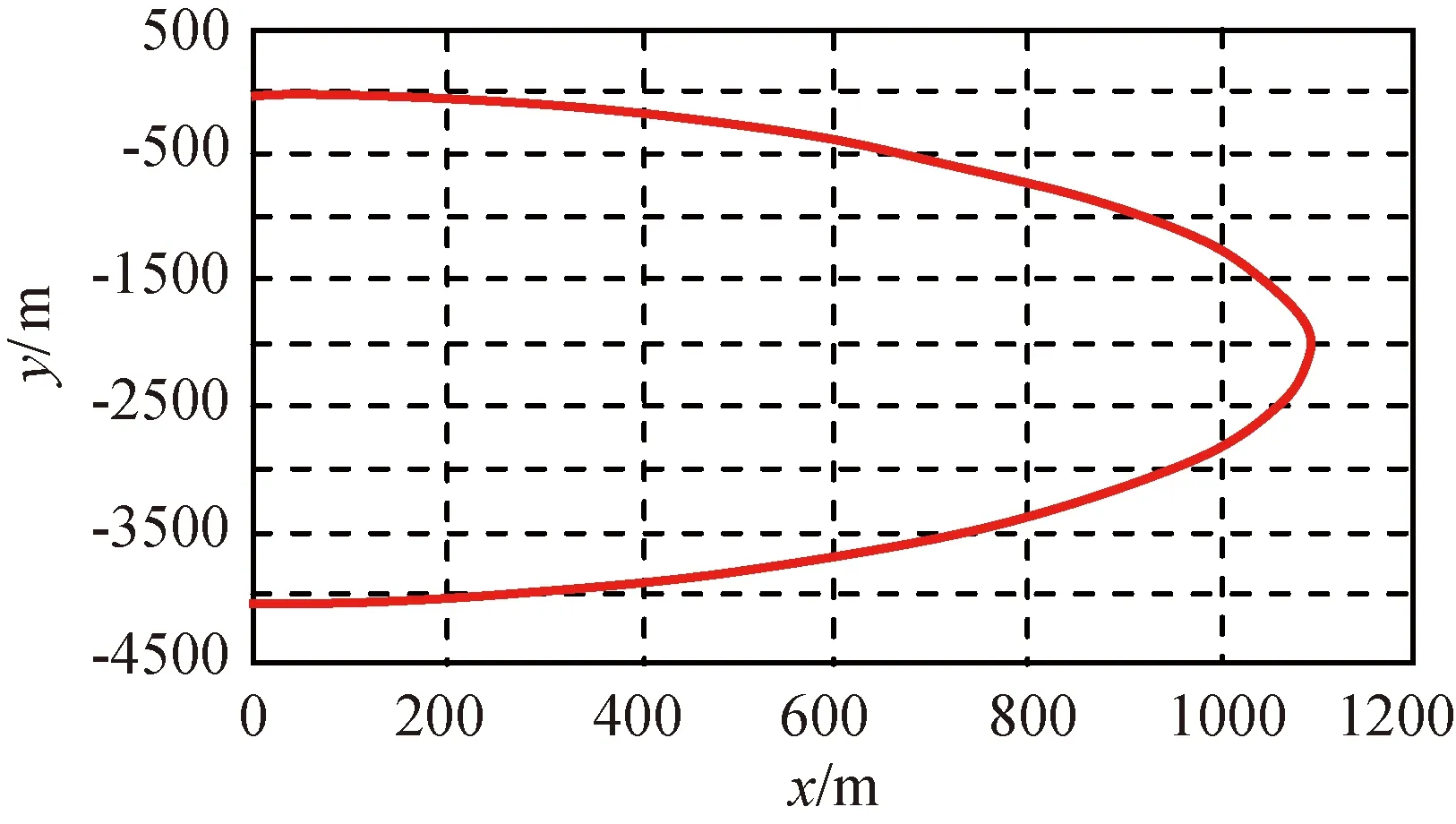
圖16 偽譜法優(yōu)化的軌道轉(zhuǎn)移Fig.16 Transfer orbit under optimization ofpseudo spectral method
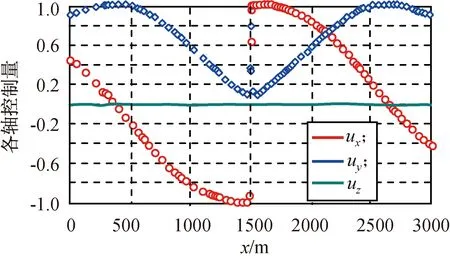
圖17 偽譜法優(yōu)化的各軸控制量Fig.17 Control of each axis under pseudo spectral method
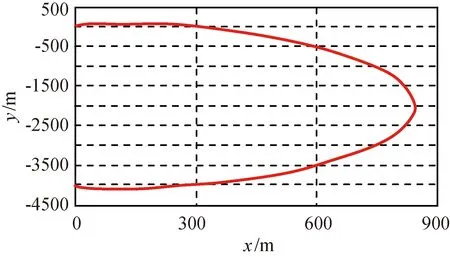
圖18 同倫法優(yōu)化的轉(zhuǎn)移軌道Fig.18 Transfer orbit under optimization ofhomotopy method
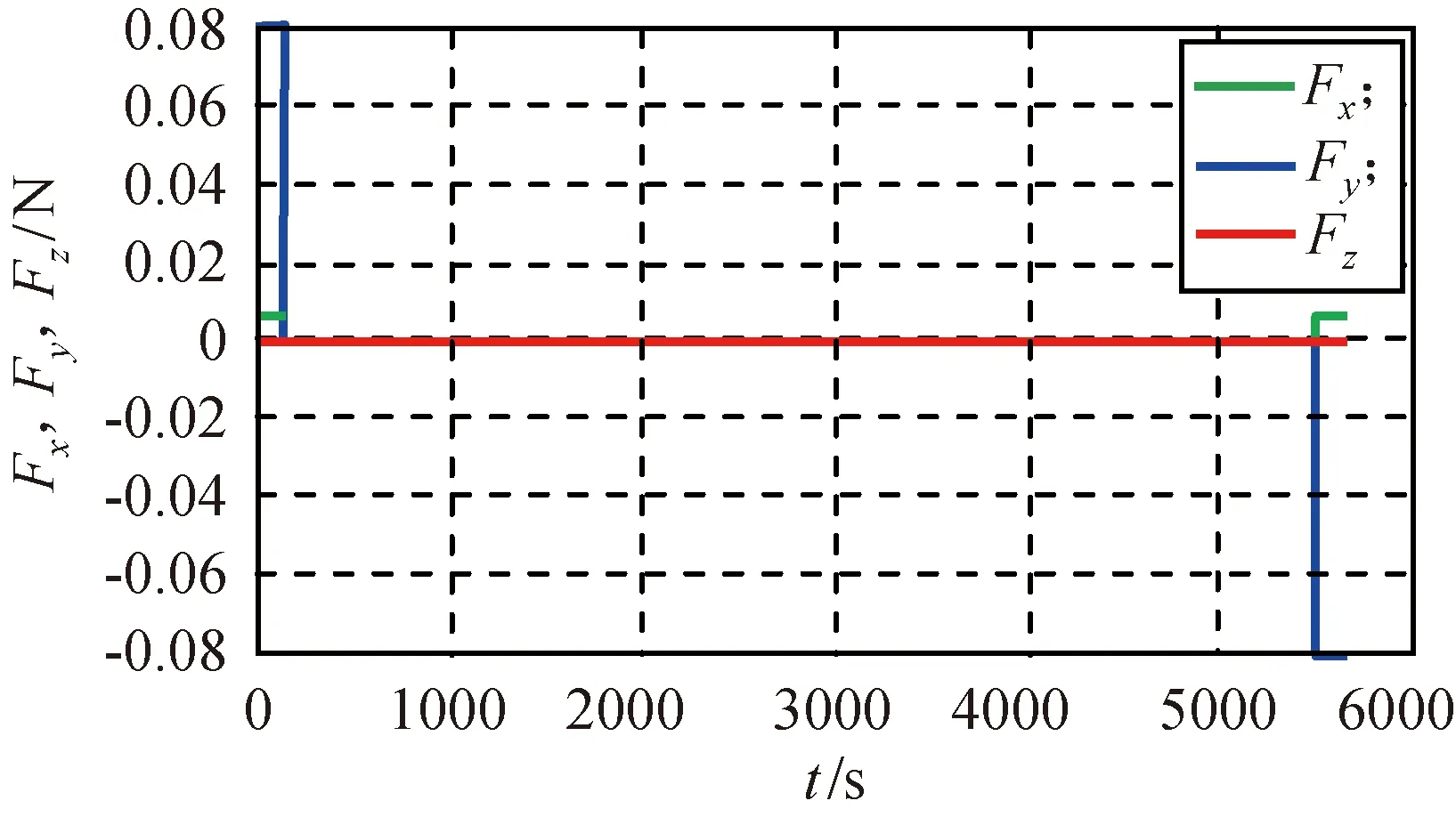
圖19 同倫法優(yōu)化的各軸力大小Fig.19 Size of axial force under optimization ofhomotopy method

圖20 同倫法優(yōu)化的總力Fig.20 Total force under optimization ofhomotopy method
偽譜法和同倫法算得的軌道轉(zhuǎn)移時(shí)間和燃料消耗見表4。
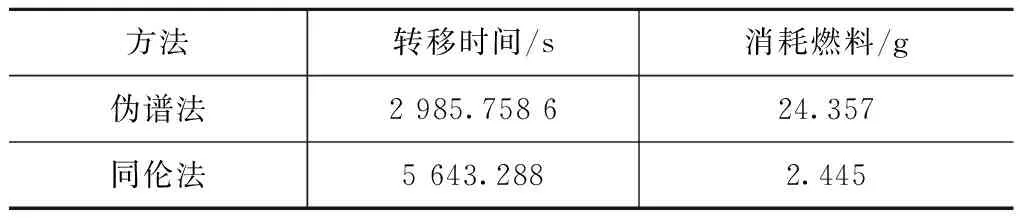
表4 偽譜軌道和同倫軌道對(duì)比(0,-4) km
由表4可知:使用同倫法后所消耗的燃料也同樣大幅減少,轉(zhuǎn)移時(shí)間也加長(zhǎng)。比較表2、4可知:兩者基本無(wú)差別,即原點(diǎn)至(0,-4)km是原點(diǎn)至(0,4)km的逆過程。
3顆從星離開原點(diǎn),構(gòu)建同軌道跟飛/領(lǐng)飛構(gòu)型最省燃料的軌道轉(zhuǎn)移如圖21所示。全程最耗燃料的僅4.89 g,遠(yuǎn)小于單獨(dú)偽譜法的燃料消耗。
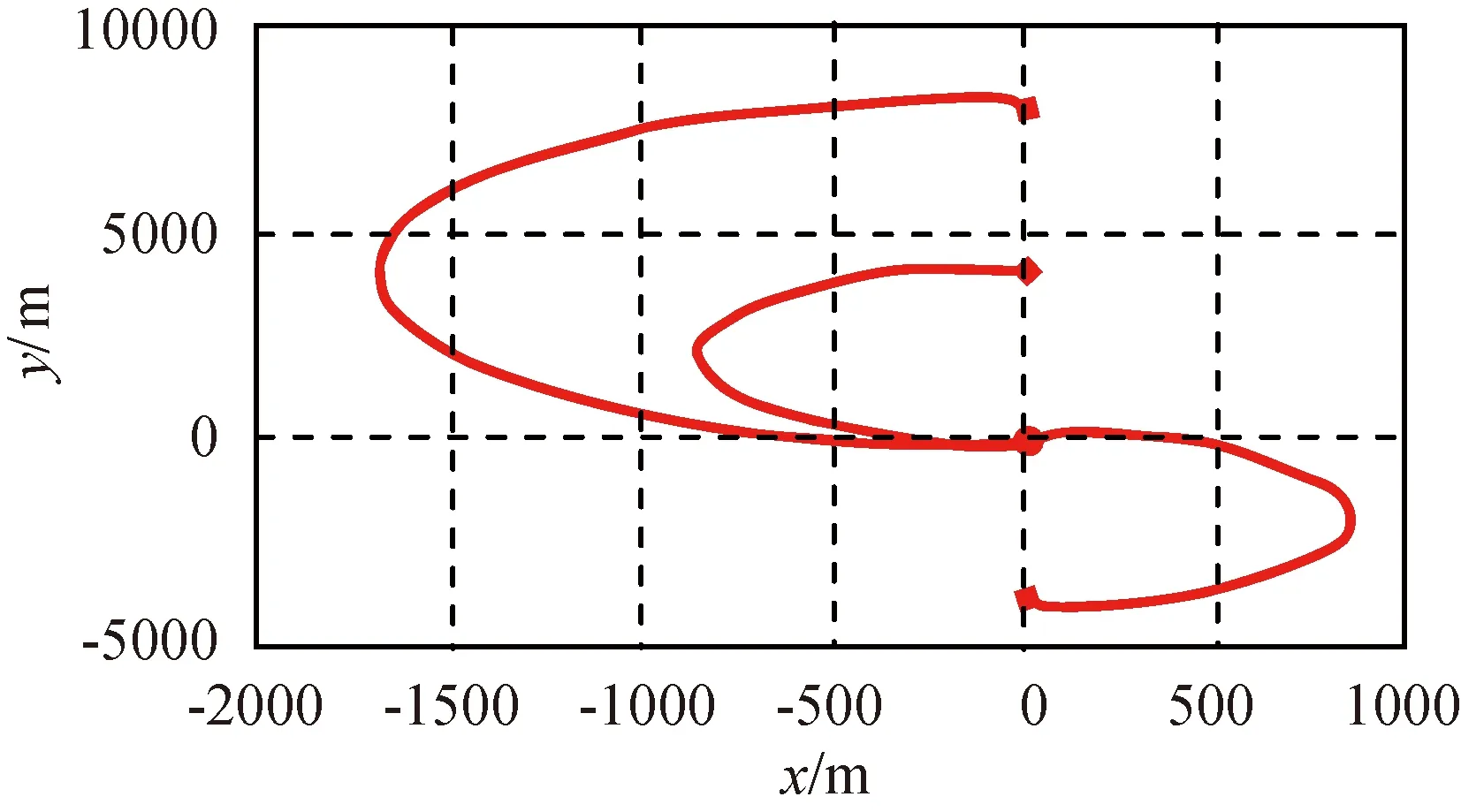
圖21 3顆從星軌道轉(zhuǎn)移圖Fig.21 Transfer orbits of three following-satellites
4 結(jié)束語(yǔ)
本文在前人的基礎(chǔ)上,將偽譜同倫算法用于求解編隊(duì)飛行問題中的多個(gè)從星飛行任務(wù)設(shè)計(jì)。偽譜同倫算法計(jì)算流程為:首先基于大推力的C-W方程,得到了一條大推力轉(zhuǎn)移初始軌道;其次用偽譜法,以性能最優(yōu)為優(yōu)化指標(biāo)進(jìn)行優(yōu)化(因其無(wú)法解決Bang-Bang控制的不光滑性,故無(wú)法得到最省燃料軌道),得到了一條平滑的控制曲線和小推力轉(zhuǎn)移軌道;再次基于偽譜法得到的小推力轉(zhuǎn)移軌道為初值再進(jìn)行同倫算法優(yōu)化,得到了最省燃料的小推力軌道和控制曲線。用本文方法對(duì)求解空間軌道的效果較好,證明了該方法最優(yōu)解的可行性。本文方法解決了偽譜法無(wú)法求得Bang-Bang控制引起的不平滑,從而無(wú)法得到最省燃料軌道以及同倫算法對(duì)初值敏感的問題。但此法尚有其缺點(diǎn),兩種算法結(jié)合后計(jì)算的難度變大,時(shí)間變長(zhǎng)。小推力用于深空探測(cè)的較多,未來(lái)研究將基于限制性三體問題中平動(dòng)點(diǎn)的編隊(duì)飛行設(shè)計(jì)。
[1] 徐劼. 小衛(wèi)星編隊(duì)飛行關(guān)鍵技術(shù)及發(fā)展趨勢(shì)分析[J]. 航天電子對(duì)抗, 2007, 23(6): 24-29.
[2] 高揚(yáng). 電火箭星際航行:技術(shù)進(jìn)展、軌道設(shè)計(jì)與綜合優(yōu)化[J]. 力學(xué)學(xué)報(bào), 2011, 43(6): 991-1019.
[3] 張友安, 王麗英, 張剛, 等. 軌跡優(yōu)化的直接數(shù)值解法綜述[J]. 海軍航空工程學(xué)院學(xué)報(bào), 2012, 27(5): 481-486+498.
[4] 孫杰, 張東青, 張紅英, 等. 庫(kù)侖力衛(wèi)星編隊(duì)動(dòng)力學(xué)建模及基本穩(wěn)定條件分析[J]. 上海航天, 2015, 32(5): 15-19.
[5] GAO Y, LI W. Systematic direct approach for optimizing continuous-thrust earth-orbit transfers[J]. Chinese Journal of Aeronautics, 2009, 22(1): 56-69.
[6] ROSS I M, GONG Q, SEKHAVAT P. Low-thrust, high-accuracy trajectory optimization[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(4): 921-933.
[7] TREFETHEN L N. Spectral methods in MATLAB[M]. Philadelphia: Society for Industrial and Applied Mathematics, 2000.
[8] JAN S H, SIGAL G, DAVID G. Spectral methods for time-dependent problems[M]. New York: Cambridge University Press, 2007.
[9] 王玉浩. 衛(wèi)星姿態(tài)快速機(jī)動(dòng)穩(wěn)定控制技術(shù)研究[D]. 哈爾濱: 哈爾濱工業(yè)大學(xué), 2015.
[10] 郭鐵丁. 深空探測(cè)小推力軌跡優(yōu)化的間接法與偽譜法研究[D]. 北京: 清華大學(xué), 2012.
[11] 李俊峰, 寶音賀西, 蔣方華. 深空探測(cè)動(dòng)力學(xué)與控制[M]. 北京: 清華大學(xué)出版社, 2014.
Design of Formation Flying Mission Based on Pseudo Spectral Homotopy Algorithm
YUE Xiao-kui1, 2, DUAN Xun1, 2
(1. School of Astronautics, Northwestern Polytechnical University, Xi’an 710072, Shaanxi, China; 2. National Key Laboratory of Space Flight Dynamics, Northwestern Polytechnical University,Xi’an 710072, Shaanxi, China)
In order to optimize the design of following-satellites flight mission, the pseudo spectrum homotopy algorithm was used to get the most provincial fuel transfer orbit with the low-thrust in this paper. The pseudo spectral method was used to optimize the transfer orbit, which was based on the non-thrust case. The transfer orbit would be used as initial value, which solved the problem of the homotopy algorithm for initial value sensitivity. Then the homotopy algorithm was used to solve the problem of the non-smoothness of the Bang-Bang control, which obtained the minimum-fuel trajectory, and the problem of indirect method for solving the optimal control problem was reduced. The numerical example of exactly the same following 3 satellites was designed, which were working on the near earth circular orbit with a height of 400 km, to construct of orbit and fly/flight configuration of the most provincial fuel trajectory. The results show that the pseudo spectrum homotopy algorithm can greatly save fuel and it is feasible and effective for the design of formation flying for the following satellites.
Formation flying; Orbital transfer; Pseudo spectrum homotopy algorithm; Bang-Bang control; Pseudo spectral method; Homotopy algorithm; Minimum-fuel trajectory; Low-thrust
1006-1630(2016)06-0044-09
2016-07-14;
2016-10-18
國(guó)家自然科學(xué)基金資助(11172235)
岳曉奎(1970—),男,教授,博士生導(dǎo)師,主要研究方向?yàn)楹教靹?dòng)力學(xué)與控制。
V412.4
A
10.19328/j.cnki.1006-1630.2016.06.006
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
