露天礦卡車雷達防追尾自動剎車系統(tǒng)的研究與應用
2016-02-16 02:35:16王有倉
工程建設(shè)與設(shè)計 2016年8期
關(guān)鍵詞:系統(tǒng)
王有倉
(中國神華準能集團,內(nèi)蒙古 薛家灣 010300)
露天礦卡車雷達防追尾自動剎車系統(tǒng)的研究與應用
王有倉
(中國神華準能集團,內(nèi)蒙古 薛家灣 010300)
論文闡述了毫米波雷達技術(shù)的信號收發(fā)原理,介紹了最新研制的露天礦卡車雷達防追尾系統(tǒng)的組成與自動剎車功能。通過礦山現(xiàn)場的工業(yè)實驗和分析,為卡車提供了在不同道路條件下的安全距離確定準則,其中包括卡車與障礙物、卡車與卡車之間的安全距離準則。在國內(nèi)露天礦首次成功地將毫米波雷達技術(shù)應用到礦山生產(chǎn)實踐,為安全生產(chǎn)提供了先進的技術(shù)手段和方法。
雷達傳感器;安全距離;自動剎車;防追尾
【DOI】10.13616/j.cnki.gcjsysj.2016.07.089
1 問題的提出
大噸位重型卡車運輸?shù)V巖,是大型露天礦山運輸?shù)闹饕问街弧_\輸?shù)闹黧w設(shè)備為重型卡車,由于其車體龐大,如圖1所示,司機視線存在盲區(qū)。在盲區(qū)范圍內(nèi)司機看不到卡車周圍的人或物體。而運輸?shù)牡缆贩植紡碗s,彎道和斜坡道起伏多樣。采場內(nèi)移動的輔助設(shè)備種類繁多,如指揮車、火藥車、推土機、修路機、灑水車等。同時,駕駛員工作強度大,連續(xù)開車幾小時,特別是夜間行車,有時存在疲勞駕駛等問題。以上這些種種,給運輸作業(yè)的安全生產(chǎn)帶來了巨大的隱患。

圖1 重型卡車與小車的比較
2 雷達防追尾系統(tǒng)的研制
2.1 雷達傳感器

表1 各種技術(shù)的對比優(yōu)劣表
以24G多普勒效應為技術(shù)的雷達傳感器,工作時發(fā)射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發(fā)射點的距離、距離變化率(徑向速度)、方位、高度等信息,這樣即可測量前方障礙物距離和速度。
2.2 系統(tǒng)組成及原理
雷達系統(tǒng)的組成如圖3所示。
雷達傳感器:安裝在卡車前端的雷達傳感器,發(fā)射和接收電磁波信號,通過信號解析算法,探測本車與前方車輛或設(shè)備之間的距離與速度。
雷達控制器:雷達控制器用來接收來自雷達傳感器的數(shù)據(jù),根據(jù)解算的距離和速度,按著雷達防追尾剎車準則,給出是否剎車的命令;并通過剎車制動檢測裝置,得知剎車踏板的剎車進程;利用系統(tǒng)狀態(tài)顯示器,可以實時得知雷達系統(tǒng)的工作狀態(tài);必要時通過剎車制動解除按鍵,使剎車踏板恢復到剎車前的位置。
剎車機械裝置:由其內(nèi)部的步進電機驅(qū)動執(zhí)行機構(gòu)轉(zhuǎn)動以便產(chǎn)生制動,可實現(xiàn)卡車的電制動(減速)或工作制動(剎車);剎車后只能由卡車司機按動剎車制動解除按鍵,才能使剎車踏板恢復到原來位置;在特殊情況下(大雨、泥濘、路滑、雷達設(shè)備故障等),要取消雷達系統(tǒng)功能,要按下應急解除開關(guān),使剎車機械裝置中的電動離合器斷開,雷達剎車系統(tǒng)失效,不再參與剎車控制。
系統(tǒng)狀態(tài)顯示器:顯示雷達系統(tǒng)的工作狀態(tài),交接班時,通過系統(tǒng)狀態(tài)顯示器可以查看設(shè)備的完好狀況;平時出現(xiàn)故障時,顯示器給出具體故障內(nèi)容,便于系統(tǒng)檢查和維護。
應急解除開關(guān):在特殊情況下,為解除雷達剎車系統(tǒng)使其不再參與剎車控制,按下應急解除開關(guān),使剎車機械裝置中的電動離合器斷開,雷達剎車系統(tǒng)失效。
剎車制動解除按鍵:當剎車機械裝置中的步進電機旋轉(zhuǎn)剎車執(zhí)行機構(gòu),使剎車踏板動作,達到電制動(減速)或機械制動(剎車)時,為解除剎車狀態(tài),必需由司機手動按下剎車制動解除按鍵,使剎車踏板恢復到剎車前的位置,剎車狀態(tài)解除,雷達剎車系統(tǒng)回到初始狀態(tài)。
剎車制動檢測裝置:采用紅外測距技術(shù),檢測剎車踏板的移動距離,從而確定剎車機械裝置中的步進電機驅(qū)動是否到位,剎車位移進展程度;也用來檢測司機是否踩下剎車踏板,為雷達系統(tǒng)提供剎車踏板實時狀態(tài)信息。
剎車執(zhí)行機構(gòu):連接剎車機械裝置中步進電機轉(zhuǎn)盤與剎車踏板之間的聯(lián)動機構(gòu)。動作時起到移動剎車踏板,模擬司機剎車的踩踏動作,實現(xiàn)剎車踏板位移,達到剎車或減速的目的。
剎車踏板:卡車司機室內(nèi)自有的剎車踏板,也是雷達系統(tǒng)連接的終端部件。

圖3 礦用卡車雷達防追尾系統(tǒng)組成
3 雷達發(fā)射接收原理
3.1 設(shè)置調(diào)制信號
探測靜止物體的距離,即靜態(tài)物體到傳感器之間的距離,調(diào)制信號采用鋸齒波即可。這是因為,此時的干擾大多為多普勒信號,而在抗干擾性能方面,鋸齒波調(diào)制要優(yōu)于三角波調(diào)制。選用線性升坡曲線或者降坡曲線作為發(fā)射頻率的時間相關(guān)函數(shù),并定期重復這些波,以期得到可能的平均值。
3.2 雷達算法分析
差頻信號中的距離信息,是通過由時間延遲引起的差頻信號來反映的。圖4是帶有鋸齒形調(diào)制方案的FMCW雷達發(fā)射和接收信號的時間相關(guān)曲線。發(fā)射頻率曲線(實線)與接收頻率曲線(虛線)的唯一區(qū)別是時間延遲。

圖4 雷達發(fā)射和接收信號的時間相關(guān)曲線
如圖4所示,在某一時刻t0時的瞬時接收信號,其頻率低于瞬時發(fā)射頻率(對于升坡曲線而言),原因是傳感器在同一時刻發(fā)射頻率已經(jīng)升高。如果在混頻器中混合發(fā)射信號和接收信號,就會生成一個恒定的差頻信號,其中包含所需的距離信息。而且,此頻率越高,目標的距離越遠。公式(1)說明了靜止目標距離R與差頻fD的關(guān)系:

式中,co為光速;R為目標的距離;T為鋸齒波重復周期;fD為差頻;Δf為振蕩器發(fā)射頻率的變化范圍,即調(diào)頻寬度。
由公式(1)可以看出,固定其余參數(shù)時,調(diào)頻寬度Δf越大,探測距離可能越小。要使得差頻處理有意義,就要使調(diào)頻速度f等于差頻fD,也就是說,掃描要生成一整個差頻周期,此時可定義最小可測距離Rmin。公式如下:

4 現(xiàn)場安全距離實驗
4.1 障礙物安全距離確定
安全距離是指車輛在不同的速度下行駛,啟動剎車后車輛從該速度降到停車所行駛的距離。安全距離是自動剎車的重要指標,根據(jù)露天礦的實際測定,它是由不同速度條件下獲得的數(shù)據(jù),經(jīng)過分析和整理,建立了如圖5所示的M2障礙物剎車距離曲線,為自動剎車提供了安全距離判斷準則。
障礙物安全距離公式:

式中,K為安全距離,m;M0為預留距離,剎車后車輛停下后與障礙物的距離,取5m;M2為剎車距離,雷達防撞系統(tǒng)剎車開始到停止所走過的距離。
由于采用了動態(tài)傾角傳感器,對行車過程中的上坡、下坡和平路的狀況進行實時測定,從而可以確定卡車運行在何種路況下,便于前方障礙物的安全距離:
障礙物平路安全距離Kzp的表達式為:

障礙物下坡安全距離Kzx的表達式為:

障礙物上坡安全距離Kzs的表達式為:

式中,V代表卡車啟動剎車時的速度,km/h。
4.2 同向行駛安全距離確定
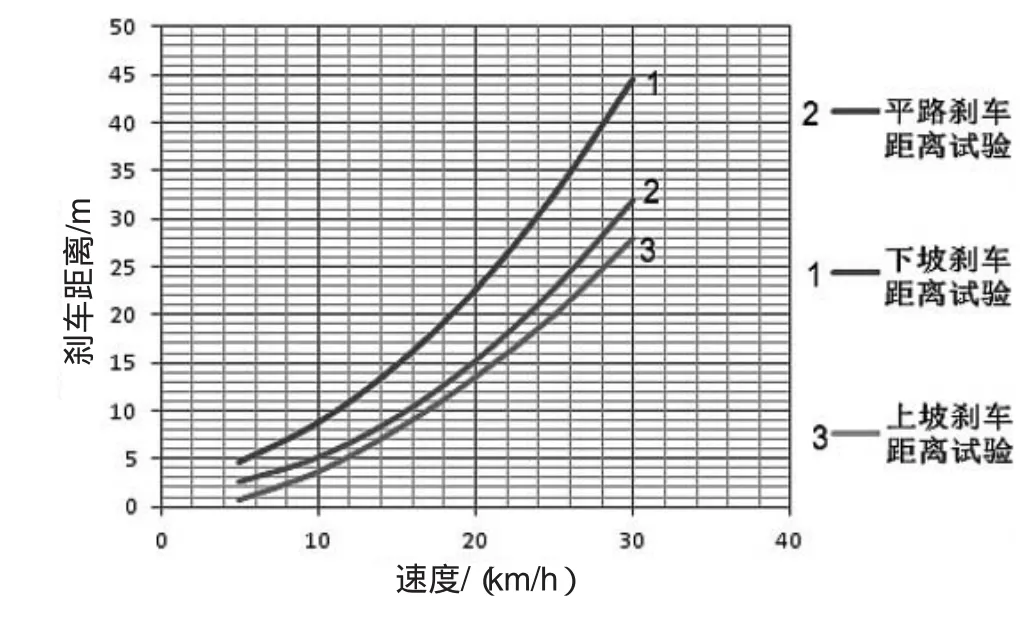
圖5 雷達剎車距離M2與車速V在不同坡度條件下的曲線圖
如果卡車前面有車,同向行駛,考慮到不同于障礙物,確定安全距離就要考慮前車的剎車距離。因為如果前面車輛啟動剎車,剎車后車輛從最初速度降到速度為零也需要行駛一段距離。與障礙物比較而言,障礙物不能動,而前車是運動的。即使同時剎車,也都有向前行駛一段距離的情況。為了減少不必要的預留距離,只要保證前后兩車剎車后能夠達到設(shè)定的間隙即可,也就是與式(4)中的M0值即可。由此得出下面同向行駛車輛的安全距離計算公式:

其中,M1為前車人為剎車距離,開始剎車到停止剎車所走過的距離,m;其他符號意義同前。
前車的剎車距離為何以人為剎車產(chǎn)生的距離來計算,那是因為人為剎車所產(chǎn)生的距離與雷達自動剎車系統(tǒng)產(chǎn)生的剎車距離是不同的,考慮到這種實際情況,只能按照各自的剎車距離來計算。同樣,也要采用動態(tài)傾角傳感器,對行車過程中的上坡、下坡和平路的情況進行實時測定,從而得出同向行駛在不同路況條件下的人為剎車距離公式:
同向平路人為剎車距離M1tp的表達式為:

同向下坡人為剎車距離M1tx的表達式為:

同向上坡人為剎車距離M1ts的表達式為:

式中,V為卡車啟動剎車時的速度,km/h。
卡車雷達自動剎車系統(tǒng)最大的剎車距離是在下坡時產(chǎn)生的,而人為剎車距離最小在上坡時產(chǎn)生的(如圖6所示),為得到最大的安全距離,將雷達最大剎車距離和卡車人為最小剎車距離帶入式(8)得到同向行駛時最大安全距離公式(取M0=5m):
Kt=6.688+V2(0.227+0.039V2)-V1(0.0352+0.0266V1).12)式中,Kt為卡車同向行駛時最大安全距離的表達式,m; V2為采用雷達防撞剎車系統(tǒng)的卡車車速,km/h;V1為采用人為剎車的卡車車速,km/h。
當然最大的安全距離可作為檢驗同向行駛車輛之間的最安全指標,在實際安全距離的確定上,采用的是不同坡度下的具體公式,由道路條件來進一步確定。
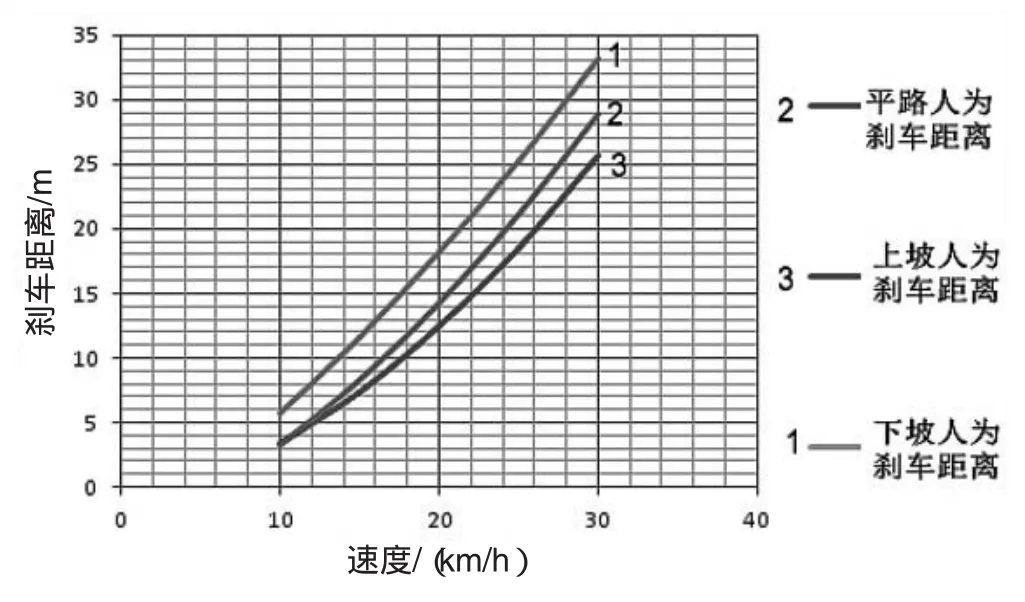
圖6 人為剎車距離M1與車速V在不同坡度條件下的曲線圖
5 結(jié)論
經(jīng)過兩年的試驗,證明大功率超聲波、紅外線、機器視覺、激光雷達在露天礦重型卡車防追尾應用中,均因各傳感器的特性不適應露天礦復雜的作業(yè)條件而沒有成功。
采用毫米波雷達技術(shù)開發(fā)的露天礦車雷達防追尾系統(tǒng),經(jīng)過多次的不斷改進、完善、優(yōu)化和試驗,證明在露天礦重型卡車防追尾應用中,能夠滿足礦山生產(chǎn)的復雜作業(yè)環(huán)境,并得出以下結(jié)論:
1)毫米波雷達防追尾自動剎車系統(tǒng)經(jīng)過一年的生產(chǎn)試驗和運行,證明系統(tǒng)設(shè)計技術(shù)先進,結(jié)構(gòu)合理,能夠滿足礦山生產(chǎn)現(xiàn)場的卡車防追尾需求;
2)通過試驗建立的不同條件下安全距離計算準則,能夠指導相應車輛在采場運行過程中的防追尾自動剎車的實現(xiàn),為運輸作業(yè)的安全生產(chǎn)提供了技術(shù)保障;
3)通過在不同的運輸作業(yè)環(huán)節(jié)(鏟位、裝卸、同向行駛、相向行駛、彎道會車等)、不同道路條件(上坡、下坡、端幫等)、不同天氣(粉塵、大霧、夜晚、雨天)的大量試驗,本系統(tǒng)都能正常運行,滿足了生產(chǎn)的需求。
綜上所述,我們研發(fā)的露天礦車輛雷達防追尾自動剎車系統(tǒng),經(jīng)過了多次的不斷改進、完善、優(yōu)化和試驗,證明在露天礦重型卡車防追尾應用中,能夠滿足礦山生產(chǎn)的復雜環(huán)境,達到了預期效果,完全可以在露天礦生產(chǎn)中推廣應用。
【1】王治國,李熹,郭德淳,費元春.超寬帶汽車防撞雷達的設(shè)計[J].現(xiàn)代雷達,2007(4):29.
【2】ZhengXinglin,LiuYang,ZengYingsheng.SignalProceedingofAutomobile MillimeterWaveRadarBaseonBPNeuralNetwork,InProceedingofICGST InternationalConferenceandMachineLearning(AIML06),June2006.
【3】梁品,陳照章,于敬泉.基于DSP的汽車防撞雷達及其信號處理[J].微電子學,2007(5):37.
Research and Application of Anti-Collision and Auto-braking System Based on Radar for Trucks with Open-pit Coal Mine
WANGYou-cang
(ShenhuaZhungeerGroupCo.Ltd.,Xuejiawan010300,China)
This paper expounds the principle of signal receiving and transmitting based on tech1nology of millimeter wave radar, and introduces the constitution of anti-collision system and automatic braking function of latest developmental open-pit-coal mine truck based on rodar. Through the industrial experiment and analysis in themine site, the safety distance determination criterions for trucks in different road conditions are provided,which includes the safe distance criterion between trucks and obstacles, trucks and trucks. For the first time in China, the application of millimeter wave radar technology has been successfullyappliedinthemineproductionpractice,whichprovidesadvancedtechnologyandmethodforthesafeproduction.
radarsensor;safetydistance;automaticbrake;anti-collision
TD65
A
1007-9467(2016)07-0139-03
2016-5-10
王有倉(1963~)男,內(nèi)蒙古鄂爾多斯人,教授級高級工程師,從事安全監(jiān)督系統(tǒng)研究,(電子信箱)238741003@qq.com。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32