某汽車鼓式制動器虛擬樣機的建模與仿真分析
2016-02-21 05:18:22章菊徐偉杰李鵬喻晨輝
汽車零部件 2016年12期
關(guān)鍵詞:模型
章菊,徐偉杰,李鵬,喻晨輝
(湖北汽車工業(yè)學(xué)院汽車動力傳動與電子控制湖北省重點實驗室,湖北十堰 442002)
某汽車鼓式制動器虛擬樣機的建模與仿真分析
章菊,徐偉杰,李鵬,喻晨輝
(湖北汽車工業(yè)學(xué)院汽車動力傳動與電子控制湖北省重點實驗室,湖北十堰 442002)
為研究鼓式制動器的模擬仿真情況,將摩擦片分別視為剛性體和柔性體。基于多體動力學(xué)分析軟件ADAMS和有限元軟件ANSYS,提出鼓式制動器多剛體模型和剛?cè)狁詈夏P偷慕⒎椒ǎ玫街苿有阅芊抡娼Y(jié)果,然后分別與理論制動力矩相對比。結(jié)果驗證了模型的正確性,且剛?cè)狁詈辖7绞礁雍侠怼?/p>
鼓式制動器;虛擬樣機;剛?cè)狁詈希恢苿有阅?/p>
0 引言
汽車制動性是汽車重要性能之一,攸關(guān)駕駛員與行人的生命安全。車用制動器主要包括鼓式制動器和盤式制動器兩大類,其中領(lǐng)從蹄式鼓式制動器結(jié)構(gòu)簡單、制動效能好、制作成本低,被廣泛應(yīng)用于轎車、貨車等汽車上。目前在鼓式制動器制動性能的研究中,數(shù)值仿真法由于其便利性、成本低和周期短的特點受到了更多的關(guān)注。鼓式制動器仿真建模方法主要有多剛體模型、多柔體模型和剛?cè)狁詈夏P汀?0世紀(jì)90年代初,美國A A SHABANA[1]建立了一種非線性多體系統(tǒng)模型,對汽車的制動系統(tǒng)進行了較準(zhǔn)確的分析;2000年后,阿文美馳公司的S SHAN等[2-3]經(jīng)研究后認(rèn)為在仿真建模時,將制動鼓和制動蹄考慮為柔體時,計算結(jié)果更加符合實際情況;之后,國內(nèi)外的研究者建立了多種制動鼓動力學(xué)預(yù)測模型[4-6],并證明了采用有限元計算更加準(zhǔn)確。然而,上述建模仿真均針對某一具體建模方法進行研究和分析,而未對同一車型的不同建模方法進行詳細(xì)的對比研究。因此,作者以某車型上的鼓式制動器為研究對象,基于虛擬樣機軟件ADAMS和有限元軟件ANSYS分別建立其多剛體模型和剛?cè)狁詈夏P停瑢υ摴氖街苿悠髦苿有苓M行仿真計算,并結(jié)合理論制動力矩計算對不同建模方法所得結(jié)果進行了對比分析。
1 鼓式制動器模型介紹
1.1 主要參數(shù)
此鼓式制動器主要由制動底板、制動輪缸、制動蹄、摩擦片、制動鼓等組成。其制動過程為:制動輪缸里的液壓油推動輪缸內(nèi)的活塞移動,活塞移動的同時帶動制動蹄向兩邊張開,制動蹄上的摩擦片與制動鼓內(nèi)表面接觸發(fā)生摩擦,產(chǎn)生制動力矩而使車輪減速和停止運動。其整車和制動器的主要參數(shù)如表1和表2所示。
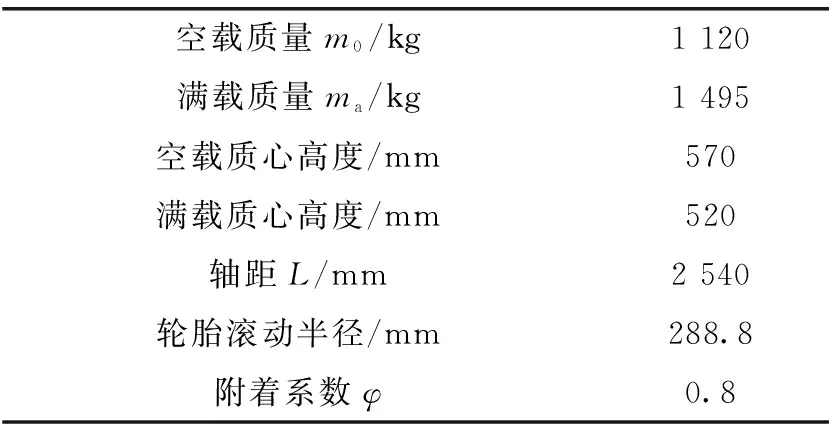
表1 整車主要參數(shù)
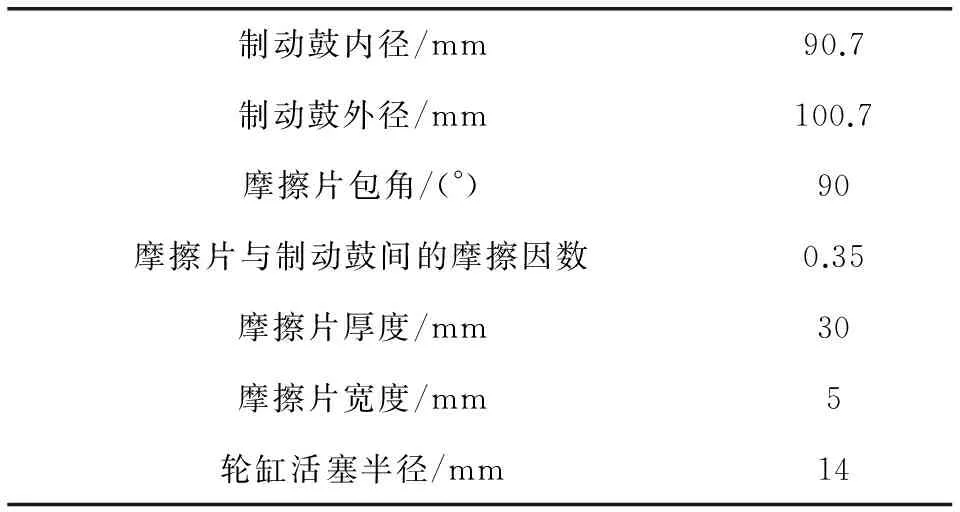
表2 鼓式制動器主要參數(shù)
1.2 整車等效轉(zhuǎn)動慣量計算
在仿真過程中將相應(yīng)的等效慣量(包含整車轉(zhuǎn)動部件的轉(zhuǎn)動慣量)施加到制動鼓上,根據(jù)等效慣量換算前后汽車動能相等[7-8],有:
(1)
式中:ma為汽車滿載質(zhì)量(kg);δ為汽車轉(zhuǎn)動部件質(zhì)量換算系數(shù),取0.07;m0為汽車整備質(zhì)量(kg);v1為汽車制動初速度;v2為汽車制動末速度,通常取v2=0;s為滑動率,取0.2;I為整車轉(zhuǎn)動部件的等效轉(zhuǎn)動慣量;rr為輪胎滾動半徑。
前、后制動器制動力分配比I為:
(2)
其中:Ff為前軸制動力;Fr為后軸制動力。
由上述公式可推導(dǎo)出單個制動器的等效轉(zhuǎn)動慣量:
(3)
1.3 理論制動力矩計算
(1)輪缸推力
Fpu=p×A
(4)
其中:p是輪缸壓強,單位為MPa;A是輪缸活塞面積,單位為mm2。而A采用下式計算:
A=π×r2
(5)
其中:r為輪缸活塞半徑,取r=14 mm;輪缸壓強p分別取5、10、15、20以及25 MPa代入公式計算,得到相應(yīng)的輪缸推力如表3所示。
(2)理論制動力矩
領(lǐng)蹄的制動因數(shù)采用下式進行計算:
(6)
從蹄的制動因數(shù)采用下式計算:
(7)
則單個車輪的制動因數(shù)可以表示為:
Kef=Kef1+Kef2
(8)
而單個車輪的制動力矩可表示為:
Tμ=Kef·Fpu·R
(9)
式中:R是制動鼓內(nèi)半徑;Fpu是輪缸推力,其實際取值見表3。
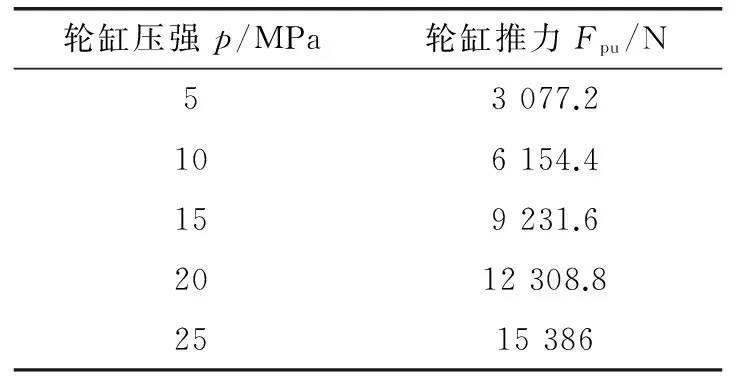
表3 輪缸推力
在式(9)中代入數(shù)據(jù)計算得到相應(yīng)的理論制動力矩,如表4所示。
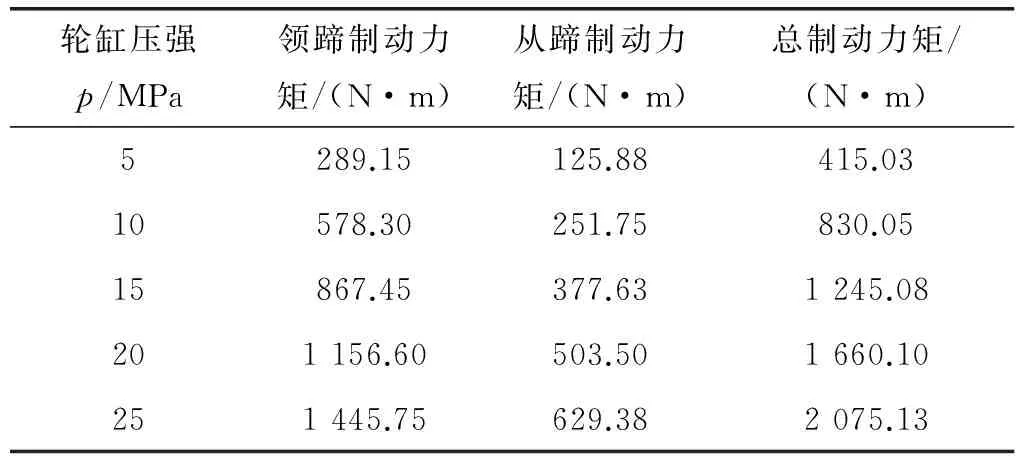
表4 理論制動力矩
2 鼓式制動器三維模型的建立
目前針對汽車零部件總成,越來越多的研究開始重視應(yīng)用多剛體動力學(xué)分析和有限元方法建立剛?cè)狁詈咸摂M樣機。剛?cè)狁詈夏P褪嵌鄠€剛性體和柔性體按照一定的方式相互作用的復(fù)雜系統(tǒng)。與多剛體系統(tǒng)相比較,剛?cè)狁詈夏P湍芨钊肟紤]模型中柔性體的變形和大范圍運動的耦合性。此鼓式制動器制動過程中,摩擦片的變形對制動具有較大的影響,有必要將摩擦片看作柔性體,文中建立以摩擦片為柔性體的剛?cè)狁詈咸摂M樣機。
基于ADAMS/View模塊建立此鼓式制動器的三維模型,其剛?cè)狁詈咸摂M樣機建立及分析過程如圖1所示。
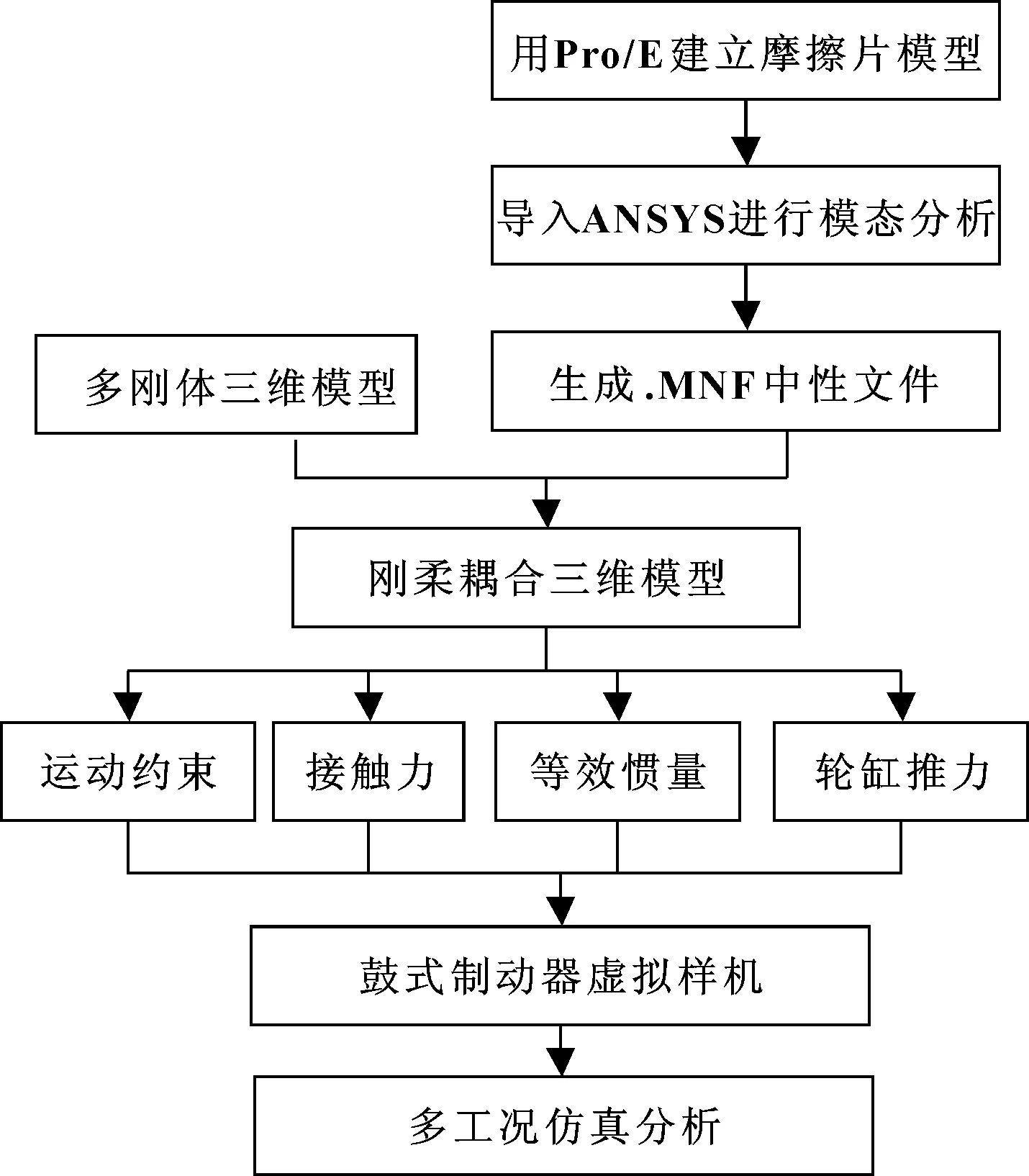
圖1 剛?cè)狁詈咸摂M樣機建模過程
2.1 多剛體模型
鼓式制動器的零部件根據(jù)實際尺寸創(chuàng)建,摩擦片也在ADAMS/View中直接創(chuàng)建,材料設(shè)置為剛體,生成的多剛體三維模型如圖2所示。
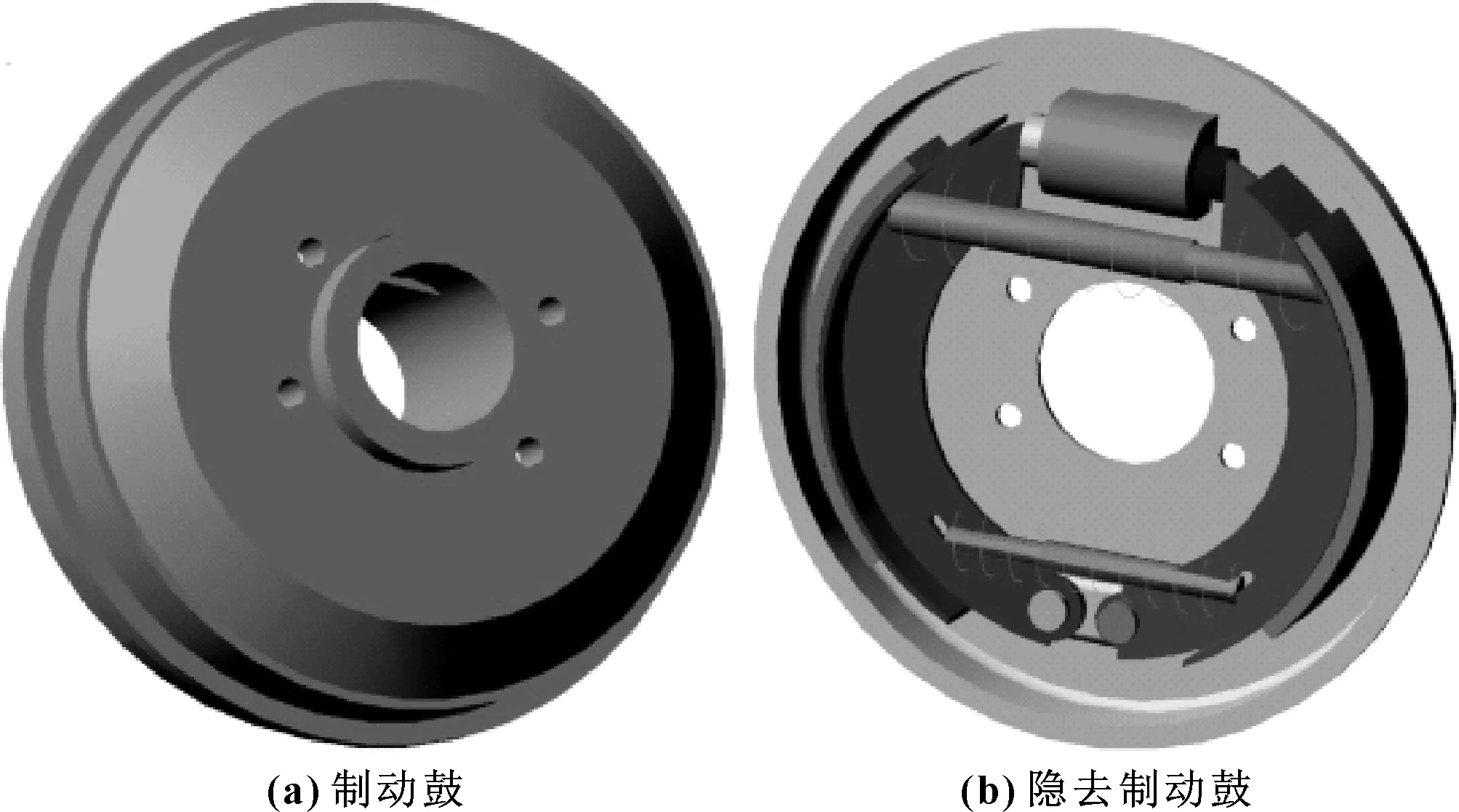
圖2 制動器總成
2.2 剛?cè)狁詈夏P?/p>
在有限元軟件ANSYS中對摩擦片定義材料屬性和網(wǎng)格劃分[9-10],如圖3所示,進行模態(tài)分析并得到其模態(tài)中性文件(*.MNF文件),將其導(dǎo)入ADAMS/View的剛性體中。需要注意的是摩擦片與制動蹄的連接,在ANSYS中建立剛性區(qū)域(剛性區(qū)域是與外界連接的不變形區(qū)域),連接點的數(shù)目必須大于或等于兩個結(jié)點,文中創(chuàng)建的3個連接點如圖4所示。
在ADAMS/View多剛性模型中剛性摩擦片被此柔性體摩擦片替換,上述方法生成的柔性體可通過固定副直接將摩擦片與制動蹄相連接。
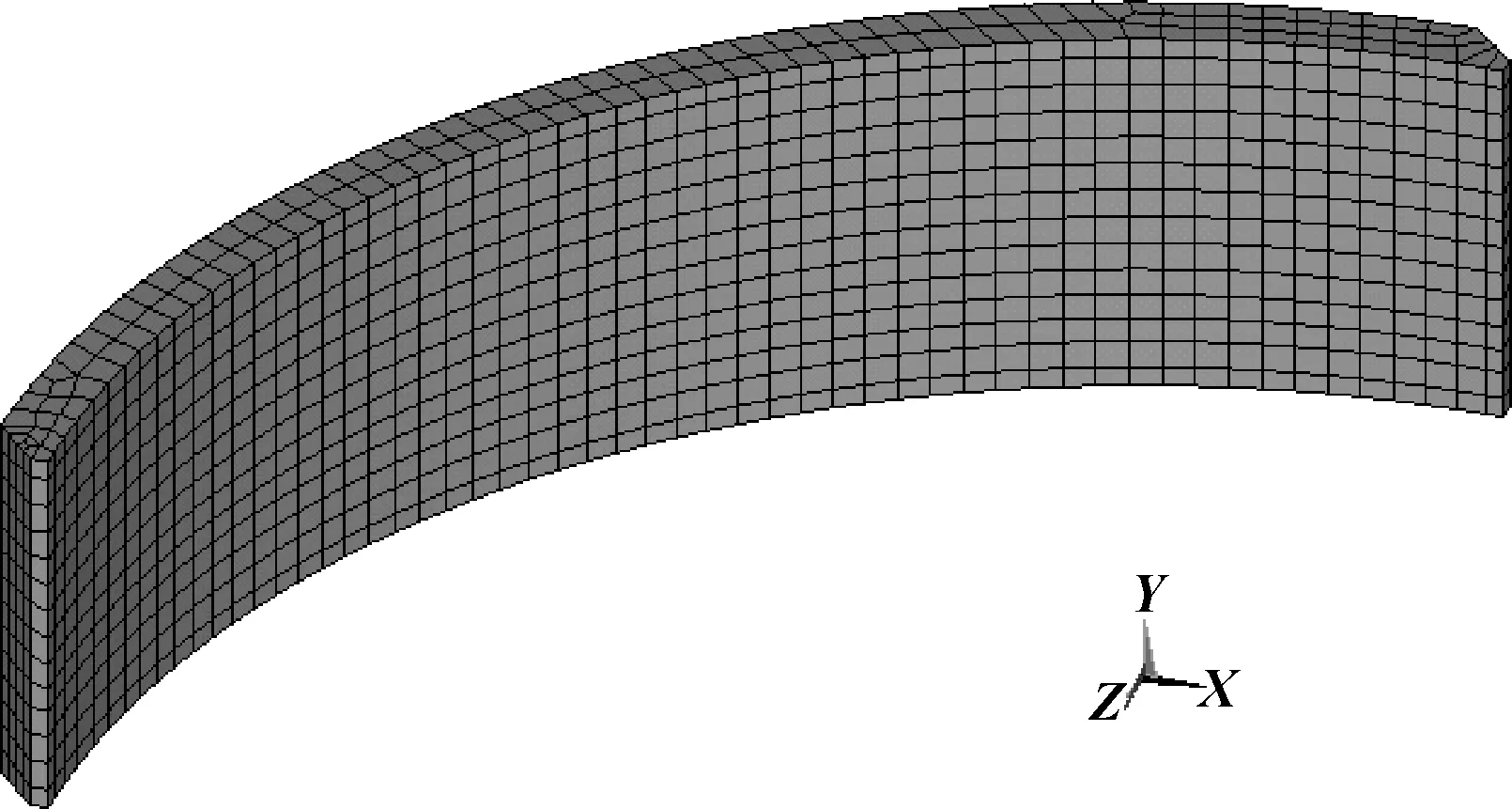
圖3 摩擦片網(wǎng)格劃分
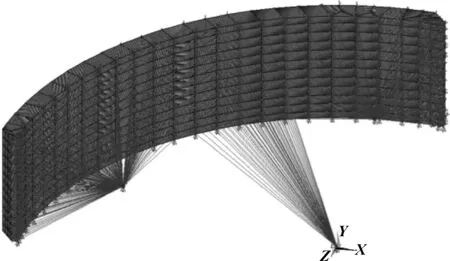
圖4 摩擦片柔性體
3 邊界條件
3.1 添加約束
鼓式制動器三維模型中,用固定約束連接制動底板和大地,即底板和大地之間無相對運動,制動輪缸與底板固定約束,兩枚支撐銷與底板固定約束,左右摩擦片分別與制動蹄固定連接,制動鼓可相對底板旋轉(zhuǎn),故二者間添加旋轉(zhuǎn)副,左右制動蹄與支撐銷之間添加旋轉(zhuǎn)副,輪缸活塞可相對輪缸作平移運動,二者之間添加移動副,輪缸活塞要推動制動蹄張開,二者間添加接觸(Solid to Solid類型)。摩擦片與制動鼓之間添加接觸(Flex Body to Solid類型),在兩個制動蹄之間添加回位彈簧,以實現(xiàn)制動蹄自動回位。各部件連接圖如圖5所示,其中F表示固定副,T表示移動副,R表示旋轉(zhuǎn)副,C表示接觸力。

圖5 制動器各部件連接圖
3.2 接觸力和制動鼓轉(zhuǎn)速
(1)制動蹄與制動活塞、摩擦片與制動鼓之間添加接觸力約束,其中制動蹄與制動活塞之間接觸類型選擇Solid to Solid,摩擦片與制動鼓之間的接觸類型選擇Flex Body to Solid。
(2)制動鼓轉(zhuǎn)速計算
當(dāng)車速為40 km/h時,相當(dāng)于11.11 m/s,由公式v=2π·rr·n,得:
(10)
其中:n為制動鼓轉(zhuǎn)速,r/s;rr為輪胎滾動半徑。
則制動鼓轉(zhuǎn)速為:ω=360°×n=2 205.5 (°)/s。
在虛擬樣機仿真中,制動鼓初始轉(zhuǎn)速設(shè)置為2 205.5 (°)/s,即相當(dāng)于40 km/h的車速。
3.3 驅(qū)動力
此鼓式制動器模型的驅(qū)動力為輪缸推力,輪缸推力大小見表3。將驅(qū)動力添加在活塞的移動副上。
4 鼓式制動器仿真結(jié)果分析
車輛在初速度為40 km/h的制動工況,制動鼓繞軸線初始轉(zhuǎn)速為2 205.5 (°)/s。
4.1 多剛體模型仿真
先以制動壓強為20 MPa即輪缸推力為12 308.8 N為例,對多剛體虛擬樣機進行動力學(xué)仿真,得到相應(yīng)仿真曲線如圖6—9所示。
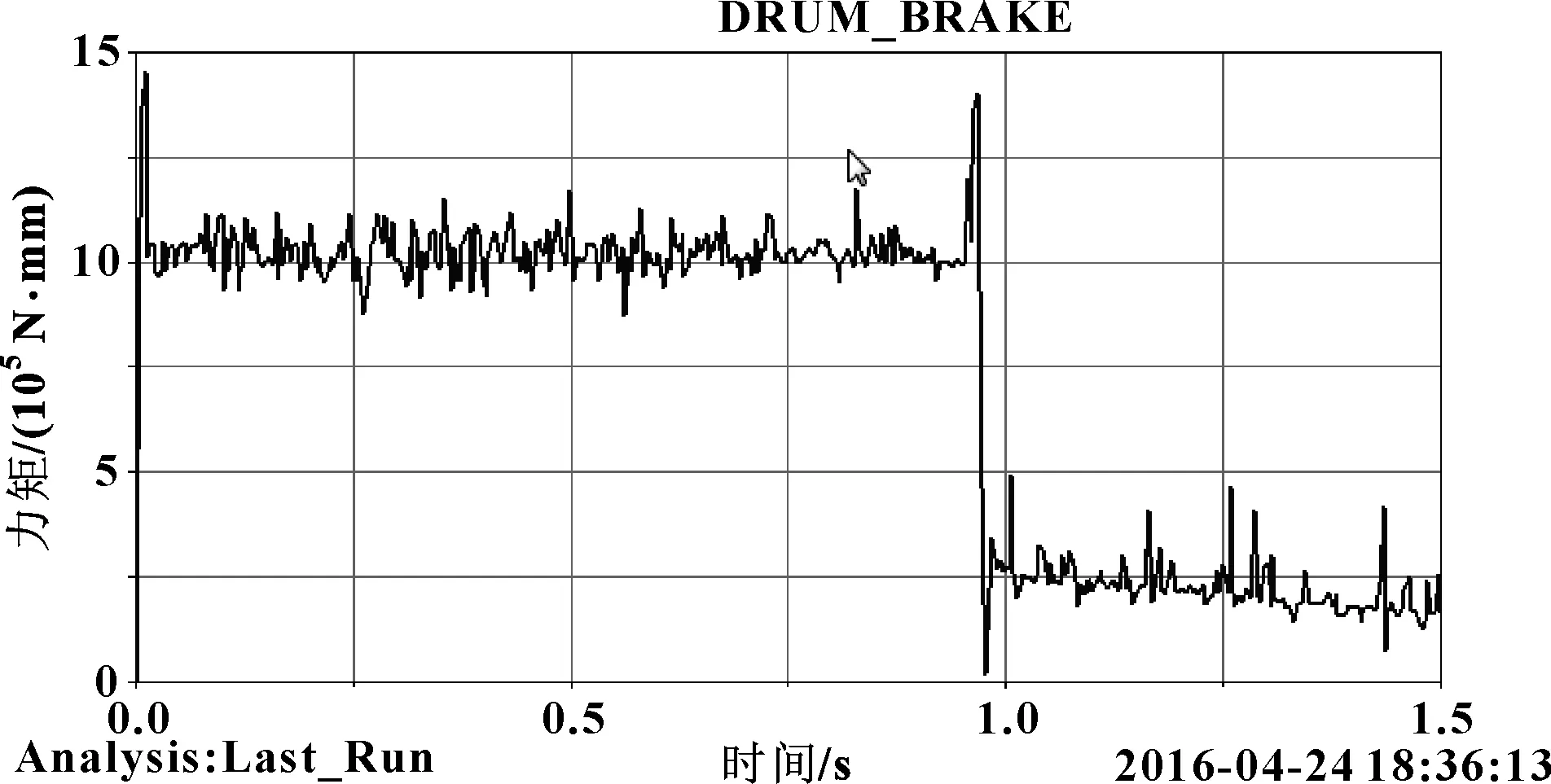
圖6 領(lǐng)蹄制動力矩(多剛體模型仿真)
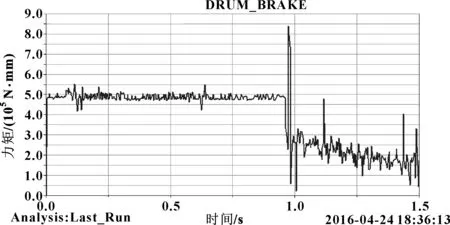
圖7 從蹄制動力矩(多剛體模型仿真)
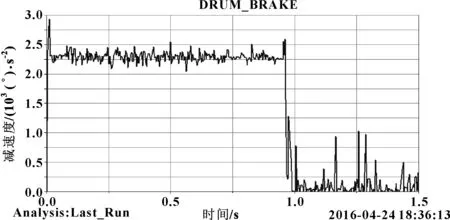
圖8 制動鼓減速度(多剛體模型仿真)
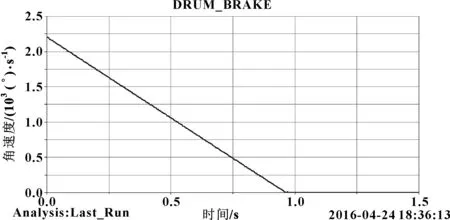
圖9 制動停車時間(多剛體模型仿真)
由仿真曲線可知:在輪缸20 MPa工況下多剛體鼓式制動器模型制動時間約為0.97 s,領(lǐng)蹄制動力矩約為1 024 N·m,從蹄制動力矩約為485 N·m,與理論制動力矩相比較,領(lǐng)蹄誤差值為11.4%,從蹄誤差值為3.8%。
不同制動壓強相對應(yīng)的制動效能結(jié)果如表5所示。
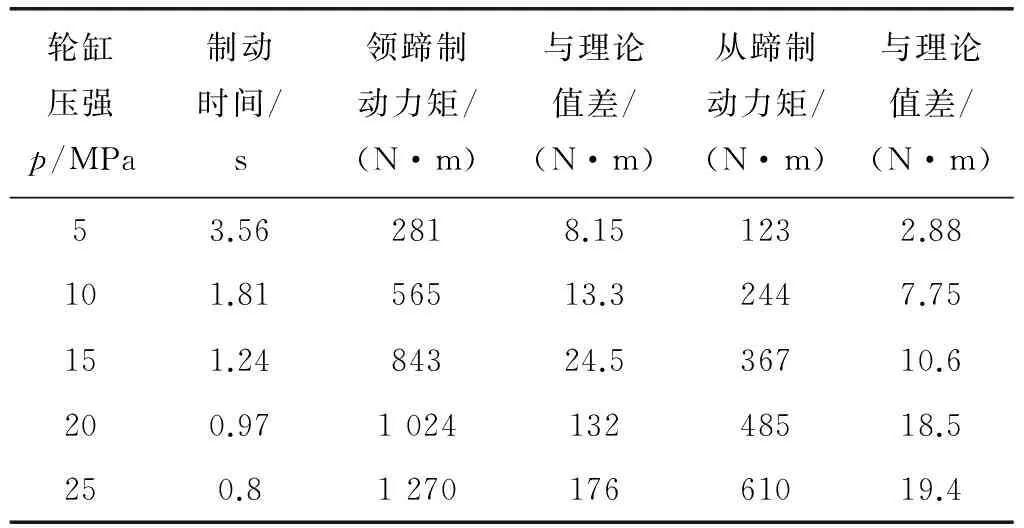
表5 多剛體模型制動效能
4.2 剛?cè)狁詈夏P头抡?/p>
以制動壓強為20 MPa為例,對剛?cè)狁詈咸摂M樣機進行動力學(xué)仿真,得到相應(yīng)仿真曲線如圖10—13所示。
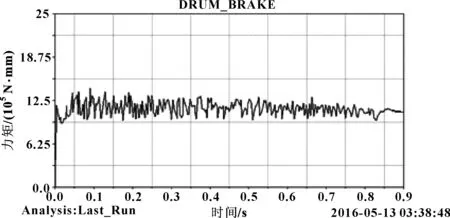
圖10 領(lǐng)蹄制動力矩(剛?cè)狁詈夏P头抡?
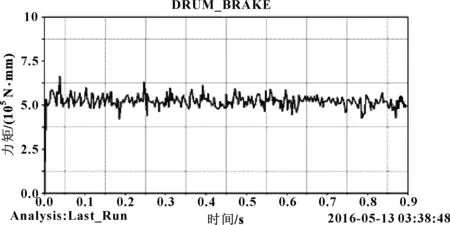
圖11 從蹄制動力矩(剛?cè)狁詈夏P头抡?
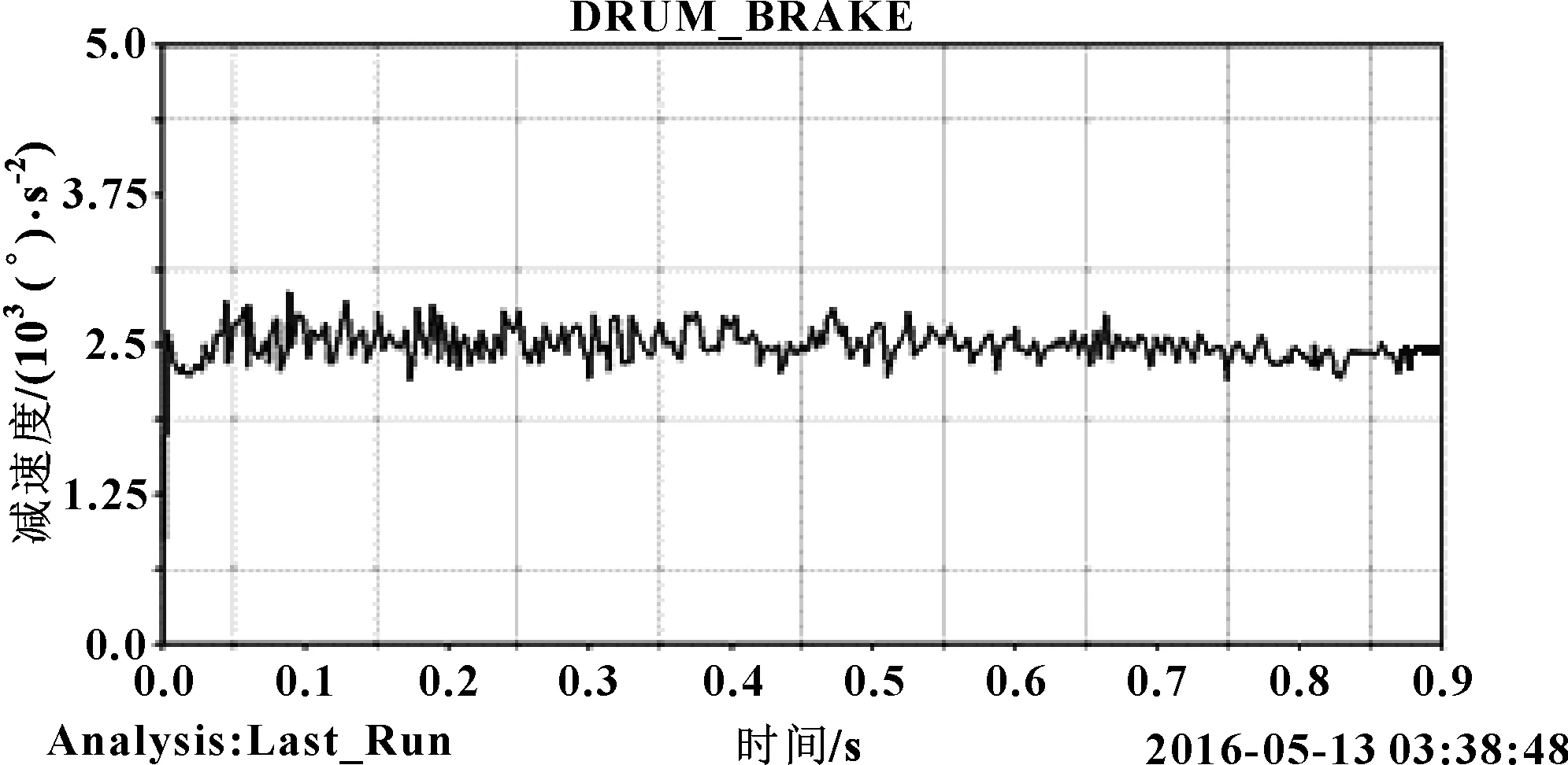
圖12 制動鼓減速度(剛?cè)狁詈夏P头抡?
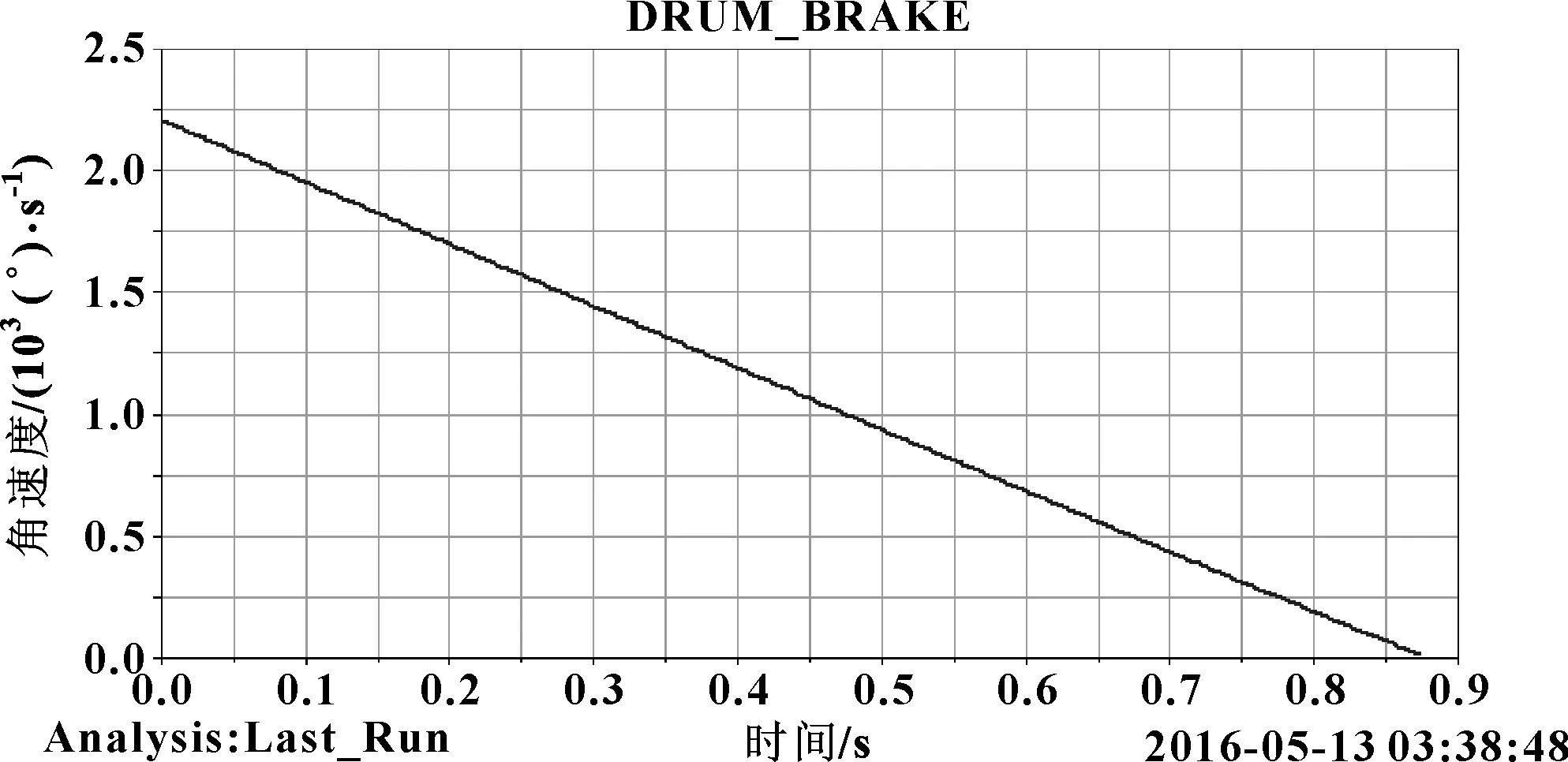
圖13 制動停車時間(剛?cè)狁詈夏P头抡?
由仿真曲線可知:在輪缸20 MPa工況下剛?cè)狁詈瞎氖街苿悠髂P椭苿訒r間約為0.87 s,領(lǐng)蹄制動力矩約為1 132 N·m,從蹄制動力矩約為521 N·m,與理論制動力矩相比較,領(lǐng)蹄誤差值為2.1%,從蹄誤差值為3.7%。
不同制動壓強相對應(yīng)的制動效能結(jié)果如表6所示。
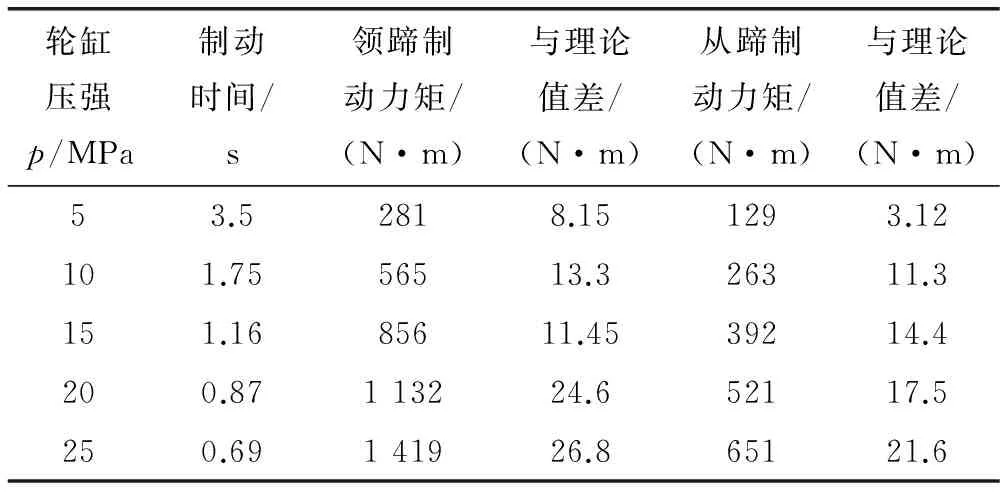
表6 剛?cè)狁詈夏P椭苿有?/p>
4.3 多剛體模型與剛?cè)狁詈夏P蛯Ρ确治?/p>
根據(jù)仿真結(jié)果得到各輪缸壓強下領(lǐng)蹄和從蹄的制動力矩對比如圖14、15所示。
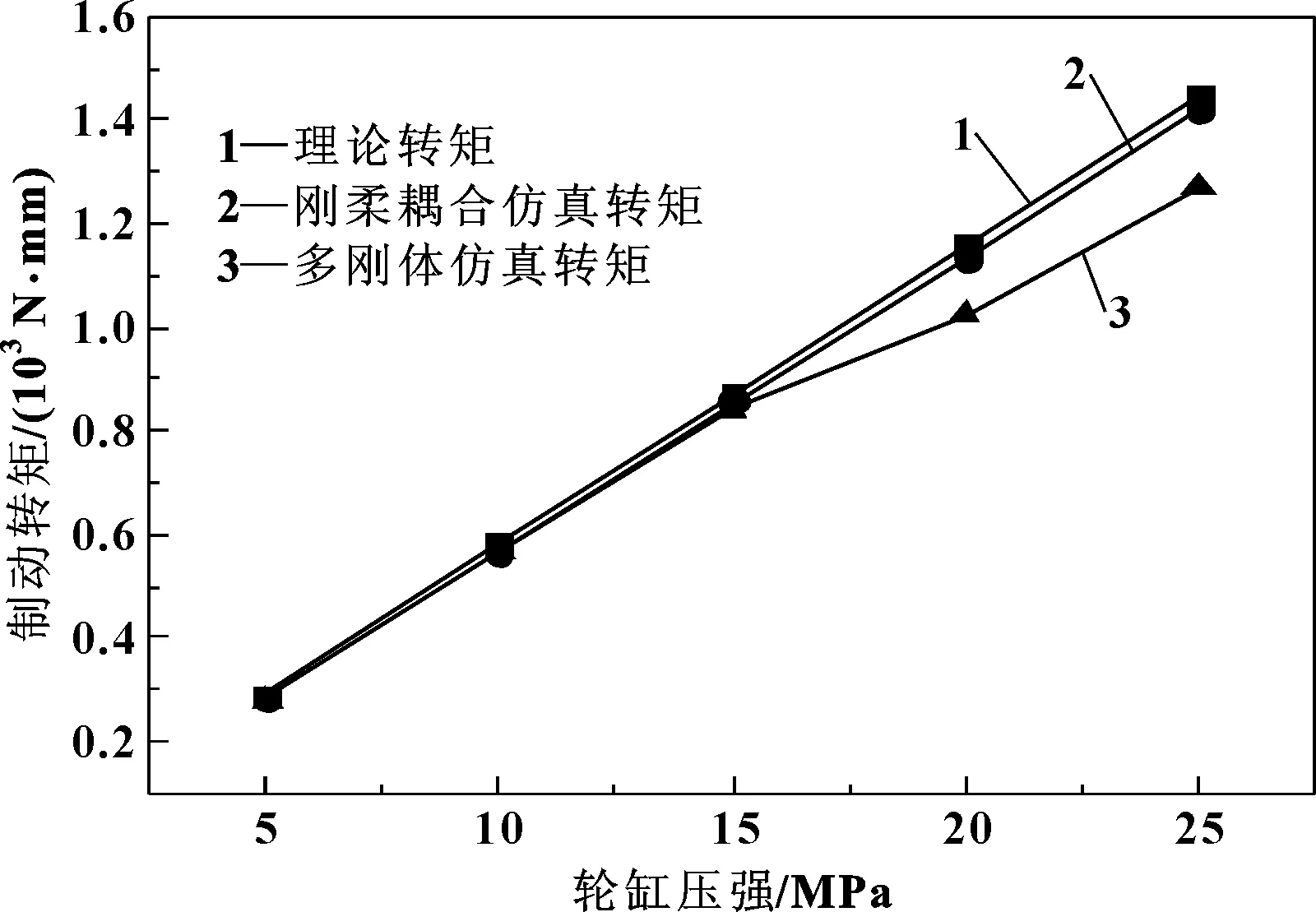
圖14 各輪缸壓強下領(lǐng)蹄制動力矩對比圖
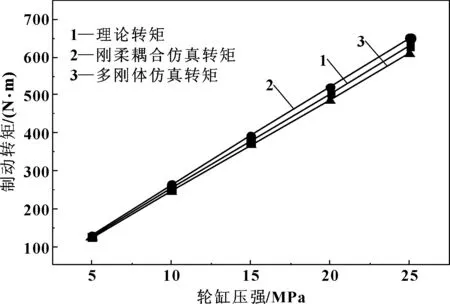
圖15 各輪缸壓強下從蹄制動力矩對比圖
從仿真結(jié)果可知:剛?cè)狁詈夏P头抡娴玫降牧嘏c理論力矩相差不大,誤差全部在5%以內(nèi);多剛體模型的領(lǐng)蹄制動力矩與理論的領(lǐng)蹄制動力矩之間的誤差隨著輪缸壓強的增大而增大,當(dāng)輪缸壓強達(dá)到20 MPa領(lǐng)蹄制動力矩誤差超過了10%。由此說明所建虛擬樣機模型是正確的,在一定程度上能如實反映該鼓式制動器的實際制動情況,同時證明了用剛?cè)狁詈戏绞浇⒌奶摂M樣機模型更加接近理論計算情況,采用剛?cè)狁詈戏绞浇8侠怼?/p>
5 結(jié)論
(1)對某型號汽車的整車等效轉(zhuǎn)動慣量和理論制動力矩進行了推導(dǎo)和計算,分別得出了輪缸壓強在5~25 MPa內(nèi)變化時該車型的理論制動力矩值,并將之作為主要參考量與多剛體模型及剛?cè)狁詈夏P陀嬎憬Y(jié)果進行對比分析,驗證了兩個模型的準(zhǔn)確性。
(2)在典型輪缸工況下,應(yīng)用所建立的多剛體鼓式制動器模型能較準(zhǔn)確地計算出鼓式制動器的制動時間、制動力矩。與理論制動力矩相比較,該模型領(lǐng)蹄計算誤差值為11.4%,從蹄計算誤差值為3.8%。
(3)在典型輪缸工況下,應(yīng)用所建立的剛?cè)狁詈瞎氖街苿悠髂P鸵嗫删_計算出鼓式制動器的制動時間、制動力矩。與理論制動力矩相比較,該模型領(lǐng)蹄計算誤差值為2.1%,從蹄誤差值為3.7%。
(4)文中所建立的兩種虛擬樣機模型均能較真實地反映鼓式制動器的實際制動情況,而采用剛?cè)狁詈戏绞浇⒌奶摂M樣機模型計算結(jié)果更加接近理論計算情況,采用剛?cè)狁詈戏绞浇8侠怼?/p>
【1】SHABANA A A.Computer Aided Analysis of Flexible Multibody Vehicle Systems[C]//SAE International-41st Annual Earthmoving Industry Conference,1990:122-127.
【2】SHAN S,SOMNAY R,HANNONR,et al.Improved Drum Brake Shoe Factor Prediction with the Consideration of System Compliance[C]//International Truck & Bus Meeting & Exposition,2000:1-10.
【3】SOMNAY R,SHAN S,JOHNSTONP.Improved Drum Brake Performance Prediction Considering Coupled Thermal and Mechanical Effects[C]//International Truck & Bus Meeting & Exhibition,2001:1-8.
【4】CHERN Y,BASCHR H.A Drum Brake Squeal Analysis in the Time Domain[R].SAE Technical Paper Serials,2005:16-19.
【5】寧曉斌,張文明.礦用汽車鼓式制動器制動效能因數(shù)的仿真分析[J].有色金屬工程,2005,57(2):120-121. NING X B,ZHANG W M. Simulating Analysis on Braking Efficiency Factor of Mining Truck Drum Brake[J].Nonferrous Metals,2005,57(2):120-121.
【6】周吉祥,袁強,鄭南豆.基于剛?cè)狁詈夏P凸氖街苿悠鲃恿Ψ抡婕盁岱治鯷J].機械傳動,2013(11):122-125.
【7】萬達(dá).基于ADAMS的鼓式制動器結(jié)構(gòu)優(yōu)化設(shè)計[D].天津:河北工業(yè)大學(xué),2010:5-35.
【8】孫麗.鼓式制動器設(shè)計與效能分析[J].現(xiàn)代制造工程,2010(8):25-27. SUN L.Design and Performance Analysis of Drum Brake[J].Modern Manufacturing Engineering,2010(8):25-27.
【9】范久臣,楊兆軍,劉長亮.鼓式制動器剛?cè)狁詈咸摂M樣機[J].吉林大學(xué)學(xué)報(工學(xué)版),2009,39(S1):183-187. FAN J C,YANG Z J,LIU C L.Virtual Prototype of Drum Brake Based on Rigid Flexible Coupling Method[J].Journal of Jilin University(Engineering and Technology Edition),2009,39(S1):183-187.
【10】張永德,汪洋濤,王沫楠,等.基于ANSYS與ADAMS的柔性體聯(lián)合仿真[J].系統(tǒng)仿真學(xué)報,2008,20(17):4501-4504. ZHANG Y D,WANG Y T,WANG M N,et al.Co-simulation of Flexible Body Based on ANSYS and ADAMS[J].Journal of System Simulation,2008,20(17):4501-4504.
Modeling and Simulation Analysis of Vehicle Drum Brake Virtual Prototype
ZHANG Ju,XU Weijie,LI Peng,YU Chenhui
(Key Laboratory of Automotive Power Train and Electronics,Hubei University of Automotive Technology, Shiyan Hubei 442002, China)
To study the simulation of drum brake, the brake friction plate was treated as rigid body or flexible body. By multi-body dynamics analysis software ADAMS and finite element analysis software ANSYS, methods to build the multi-rigid-body model and rigid-flexible coupling model of drum brake were proposed, and braking performance simulation results were obtained and compared with the theory results of brake torque. The results verify the model and show that the rigid-flexible coupling model is more reasonable.
Drum brake; Virtual prototype; Rigid-flexible coupling; Braking efficiency
2016-09-14
汽車動力傳動與電子控制湖北省重點實驗室開放基金資助項目(ZDK1201502)
章菊(1988—),女,碩士,助教,主要研究方向為汽車動力學(xué)仿真與控制。E-mail:fionanzhang@163.com。
10.19466/j.cnki.1674-1986.2016.12.003
U463;TH16
A
1674-1986(2016)12-012-06
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
