中風康復訓練裝置的設計
2016-03-10 00:16:47海南醫學院信息技術部
電子世界 2016年24期
關鍵詞:設計
海南醫學院信息技術部 楊 芳
中風康復訓練裝置的設計
海南醫學院信息技術部 楊 芳
本訓練裝置實現用機械臂帶動患肢運動,幫助病人神經康復。機械臂采用氣動人工肌肉作為驅動器,給出了訓練裝置的運動軌跡規劃,并采用ARM處理器實現訓練裝置的運算量大和實時性要求。本訓練裝置具有便攜性可以滿足家庭訓練。
訓練裝置;氣動人工肌肉;關節模型;ARM
0 引言
隨著老齡人口的增加,年齡增長引起的疾病也逐漸增加,其中最常見、危害最大的就是中風。隨著醫療水平的提高,其死亡率已有所下降,但致殘率居高不下。大約1/3的腦卒中存活者會遺留嚴重的殘疾,最常見的結果是上肢運動與協調的功能障礙,大約85%的腦卒中患者一開始顯示出上肢功能障礙而只有50%的患者能夠恢復患側的上肢功能[1][2]。對其偏癱部位進行康復訓練是十分重要和關鍵的醫療手段,及早進行康復訓練可以大大減少殘疾的可能性。
1 訓練裝置
本訓練裝置是用機械臂帶動患肢按預先設定的軌跡做被動和主動運動。本訓練裝置由控制器、壓力比例閥、氣動人工肌肉、角度傳感器、壓力傳感器組成。氣動人工肌肉工作所需要氣壓由外部氣源提供,當氣體從外部氣源向氣動人工肌肉流動時經過壓力比例閥,壓力比例閥的作用是控制流入氣動人工肌肉的氣體壓強。隨后氣流進入氣動人工肌肉,使得氣動人工肌肉收縮或伸張,兩個氣動人工肌肉通過鏈輪連接,不同的氣壓使得其對外有力的輸出從而使得關節轉動[3][4]。將測得角度傳感器和壓力傳感器的數據反饋到ARM控制系統,由控制系統將測得值與設定值相比較,并控制壓力比例閥流入氣動人工肌肉的氣壓來消除兩者之間的誤差,從而保證設定值與實際值一致。
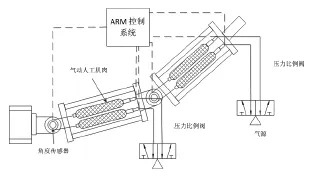
圖1 系統框圖
2 氣動人工肌肉
氣動人工肌肉是患肢運動的驅動器。氣動人工肌肉是由一段外部包裹的纖維網的橡膠筒和兩端的接頭連接組成,如同生物肌肉那樣能產生很強的收縮力[5][6][7]。當氣動人工肌肉充氣后,橡膠筒開始變形膨脹。由于纖維編織網的剛度很大,其對橡膠筒的約束使得氣動人工肌肉徑向膨脹和軸向收縮。

上式為氣動人工肌肉的輸出力F與壓強P之間的關系式,從式中可以看出氣動人工肌肉的輸出力與壓強成正比。式中α0為編織角,r為半徑,k為校正值,L0為初始長度。
3 運動軌跡規劃
訓練裝置對于運動路徑有嚴格要求,必須在直角坐標空間中進行規劃,然后將規劃得到的直角坐標空間中的軌跡序列運用訓練裝備運動學反解算法變換到關節坐標空間中,再進行關節運動軸的控制。圖2所示就是訓練裝置在直角坐標空間中進行路徑規劃控制的框圖。

圖2 路徑規劃控制的框圖
如圖3所示,由余弦定理有:
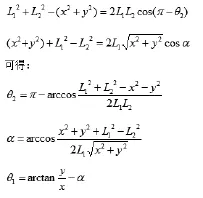
從圖3可以看出,實際運行中,要到達同一個位置可能有兩種路徑,如何從運動學的多組反解中選擇一組合適的解是一個值得研究的問題。一般地,具有多組反解的運動學問題可以采用優化算法來解決,定義一個優化準則,選擇滿足優化準則的最優解作為運動學的確定反解。當不存在障礙物時,可以使用“最短行程”準則,因為訓練裝置的運動是連續的,結合前一次訓練裝置運動學反解得到的關節坐標位置,選取使訓練裝置關節運動量最小的一組解作為反解,這種選取方法可以使得訓練裝置的運動保持連續。
4 控制系統
為滿足控制系統的運算量大、實時性要求,本設計的控制系統采用 PHLIPS的LPC2210作為處理器,該處理器是基于一個支持實時仿真和跟蹤的16/32位144腳ARM7TDMI-S CPU 的微控制器[8]。一個嵌入式處理器自己是不能獨立工作的,因此一個ARM嵌入式最小系統包括:電源電路、系統時鐘電路、復位電路、系統存儲器電路和調試接口,如圖4所示。
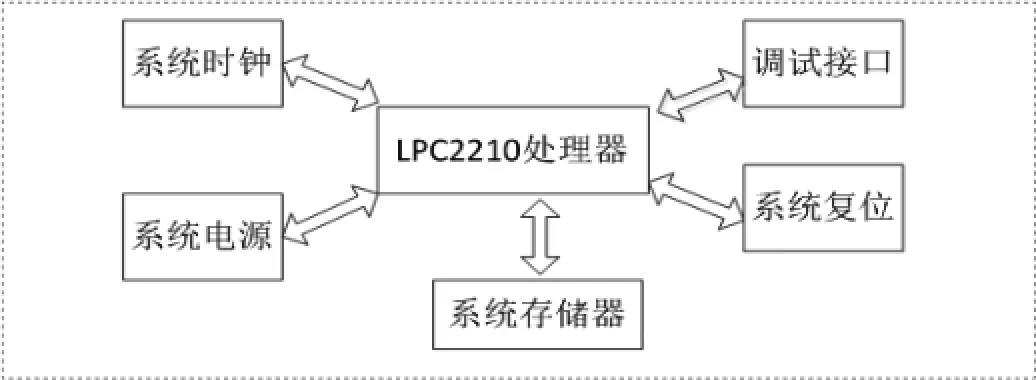
圖4 ARM控制系統框圖
控制系統的作用是:①根據預定位置(x,y)計算出角度的大小θ1、θ2;②通過θ1、θ2的大小計算氣動人工肌肉1、2、3、4應該的伸縮量ε;③根據伸縮量ε計算流入氣動人工肌肉的氣壓并控制壓力比例閥流入氣動人工肌肉的氣壓;④比較各壓力傳感器的實際測量值與計算值是否一致,若不一致控制改變壓力比例閥流入氣動人工肌肉的氣壓;⑤角度傳感器的反饋數據進入控制系統,由控制系統比較實際值和測量值,若不一致控制并調整數值。
5 結語
本訓練裝置采用的氣動人工肌肉作為驅動器,氣動人工肌肉組成的關節模型具有自緩沖、自穩定的特點,從而使得訓練裝置更加安全。控制系統采用ARM處理器,能夠滿足本訓練裝置運算量大、實時性的要求,設計的訓練裝置是以任務為導向的運動訓練從而使患肢達到神經康復的目的。
[1]Parker,VM,Wade DT,Langton-Hewer R,et al.Loss of Arm Function after Stroke:Measurement,Frequency,and Recovery.Int Rehabil Med,1986,8:69-73.
[2]Broeks JG,Lankhorst GJ, et al.The Long-term Outcome of Arm Function after Stroke:Results of a Follow up Study.Disabil&Rehab il,1999,21(8):357-364.
[3]TU Diep Cong Thanh, Kyoung Kwan Ahn.Nonlinear PID control to improve the control performance of2 axes pneumatic artificial muscle manipulator using neural network. Mechatronics16,2006,:577–587.
[4]Kyoung Kwan Ahn *, Huynh Thai Chau Nguyen.Intelligent switching control of a pneumatic muscle robot arm using learning vector quantization neural network. Mechatronics 17,2007:255–262.
[5]Chou, C.-P., and B. Hannaford. Measurement and modeling of McKibben pneumatic artificial muscles. IEEE Transactions on Robotics and Automation 12,1996:90–102.
[6]Chou C P,Hannaford B.Measurement and modeling of mckibben pneumatic artificial muscles.IEEE Trans Rob Autom,1996,12(1):90-102.
[7]Wang,SF,Sato,K.High-precision motion control of a stage with pneumatic artificial muscle.PRECISION ENGINEERING-JOURNAL OF THE INTERNATIONAL SOCIETIES FOR PRECISION ENGINEERING AND NANOTECHNOLOGY,2016,1(43):448-461.
[8]http://www.alldatasheet.com.

短路電流周期分量起始有效值:
本設計是基于單一景點深度開發的專門性的游客服務的手機APP。本設計專注于單一景點開發,因此景點的信息覆蓋全面,沒有冗雜信息干擾,目的性明確,垂直服務于景點旅游的游客。本設計的意義在于旅游景區為游客提供更好的服務,為用戶提供更好的指引。同時游客能夠通過APP隨時隨地了解某一景區的最新動態,有利于自己選擇合適的時間出游,并且能夠快速地滿足酒店、旅游社以及旅客三方面的需求[3]。

當10kV母線并列運行時,10kV側短路:

短路電流周期分量起始有效值:
計算結果顯示,當10kV母線并列運行時,10kV側發生短路,短路全電流最大有效值達36.35kA,考慮10kV設備開斷電流不宜選擇過大,故主變壓器低壓側10kV母線不考慮并列運行方式。
通過上述的短路電流計算可進行短路的動穩定校驗,動穩定條件為:
式中:ich—短路電流沖擊值(kA);Ich—短路全電流最大有效值(kA);idf—電器允許的極限通過電流峰值(kA);Idf—電器允許的額定短路開斷電流(kA);
短路電流計算結果和設備技術數據的比較詳見下表:
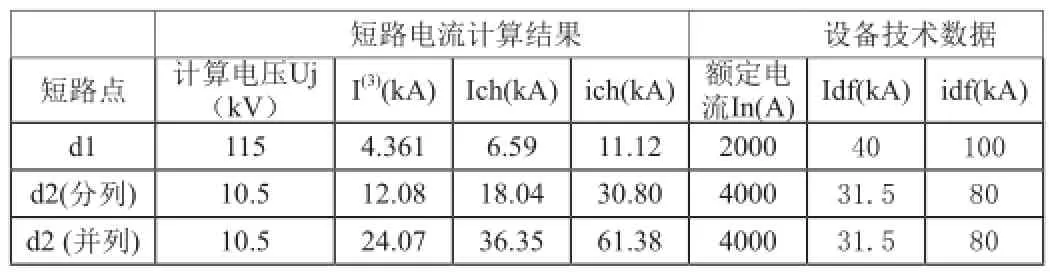
由上表可見,各電壓等級的最大短路電流均在所選斷路器的開斷能力之內,所選擇的110kV SF6斷路器、10kV真空斷路器完全滿足動穩定的要求。
4 結論
本文通過110kV谷陽變電站的設計實例對短路電流計算作了重要闡述,為該變電站的進一步設計打下了良好的基礎。
參考文獻
[1]焦留成.供配電設計手冊[M].中國計劃出版社,1999.
[2]王錫凡.電力工程基礎[M].西安交通大學出版社,1998.
[3]張煒.電力系統分析[M].中國水利水電出版社,1999.
[4] 水利電力部西北電力設計院.電力工程電氣設計手冊(電氣一次部分)[M].中國電力出版社,1996.
作者簡介:
楊曉艷,女,安徽蚌埠人,工程師,現供職于國網安徽省電力公司蚌埠供電公司經研所。
楊芳(1983- ),女,講師,主要從事醫學物理教學,研究方向為醫療儀器。
海南醫學院教育科研課題《醫學信息管理專業模擬電路與數字電路課程改革與實踐》(編號:HYP201514)。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04