SIMULINK在反應堆溫度控制系統仿真中的應用研究
2016-03-13 12:05:24但成利熊少勇白緒濤
電力安全技術 2016年12期
關鍵詞:系統
但成利,熊少勇,白緒濤
(1.福建寧德核電有限公司,福建 寧德 325609;2.蘇州熱工研究院有限公司,江蘇 蘇州 215004)
SIMULINK在反應堆溫度控制系統仿真中的應用研究
但成利1,熊少勇1,白緒濤2
(1.福建寧德核電有限公司,福建 寧德 325609;2.蘇州熱工研究院有限公司,江蘇 蘇州 215004)
采用SIMULINK軟件對核電站反應堆溫度控制系統進行建模和仿真,著重介紹了建模方法以及技巧,并將仿真結果與實際數據進行了比較,驗證了模型的正確性,此種仿真方法可在其他動態控制領域進行類似的應用。
反應堆;溫度控制系統;仿真;SIMULINK
0 引言
核電站在調試和運行階段需要進行系統參數優化,控制系統驗證以及操作員培訓等工作,但由于動態系統的復雜性,該工作過程往往枯燥且效率低下。鑒于此,利用MATLAB/SIMULINK軟件,以核電站反應堆溫度控制系統為例進行建模,對其瞬態工況進行了動態仿真。這樣不僅讓讀者了解核電站溫度控制系統的調節過程,更重要的是熟悉動態系統的建模仿真方法,并可將這種方法在其他類似動態系統中推廣和應用。
1 反應堆溫度控制系統簡介
反應堆溫度控制系統的主要作用是調節一回路平均溫度,使其盡量接近由二回路負荷決定的溫度參考值,其控制原理如圖1所示。
反應堆溫度控制系統的主要工作原理是通過綜合溫差e的極性和大小來控制溫度控制棒移動的方向和速度。綜合溫差e由式(1)決定:

式中:Tref為參考平均溫度;Tavg為3個環路平均溫度最大值;k1為負荷系數;k2為功率失配系數;P1為反應堆功率;P2為二回路功率;t為時間;e為綜合溫差;e1為一、二回路溫差;e2為功率偏差通道輸出。
當綜合偏差e為正時,說明一回路溫度有偏冷的趨勢,溫度控制棒上提;反之,溫度控制棒下插。由于溫度控制棒功能的需要,其對一回路溫度控制采取的是“前饋+反饋”的調節系統。
首先,溫度控制棒需要對一回路溫度進行精確調節,而反饋調節(閉環調節)可以基于一、二回路溫度偏差進行調節,從而使一回路溫度盡量接近參考溫度,實現一、二回路功率的匹配,這種調節在功率穩定期間處于主導地位。在此調節過程中,由于一、二回路功率基本保持不變,e2輸出接近為0,所以綜合溫差e與e1基本保持一致。此反饋調節的大致過程為:當一回路平均溫度Tavg小于參考平均溫度Tref為時,e1為正,產生正的綜合溫差,溫度控制棒上提。由于控制棒提出堆芯,反應性開始增加,但是由于二回路負荷并未增加,二回路從一回路帶走的熱量也未變化,一回路平均溫度Tavg增加并逐漸接近參考平均溫度Tref,造成綜合溫差e減小,最終使e進入死區,溫度控制棒停止動作。這一系列過程,構成了溫度控制棒的閉環調節回路,即反饋調節。
在機組試驗期間或意外大瞬態階段,如果出現跳機、跳堆或甩負荷,堆芯功率或二回路負荷會產生劇烈波動。當功率突然變化時,會造成一、二回路功率的短時失配。由于溫度測量和傳遞的滯后,平均溫度測量值來不及反映實際平均溫度,這會造成閉環通道溫度調節滯后,可能導致一回路超溫等后果。為了提高調節速度,反應堆溫度控制系統設置了前饋環節。前饋環節提取一、二回路功率失配變化率信號,并考慮功率失配大小和瞬態前二回路功率大小,對反應堆溫度進行超前調節,以滿足迅速調節的需要。
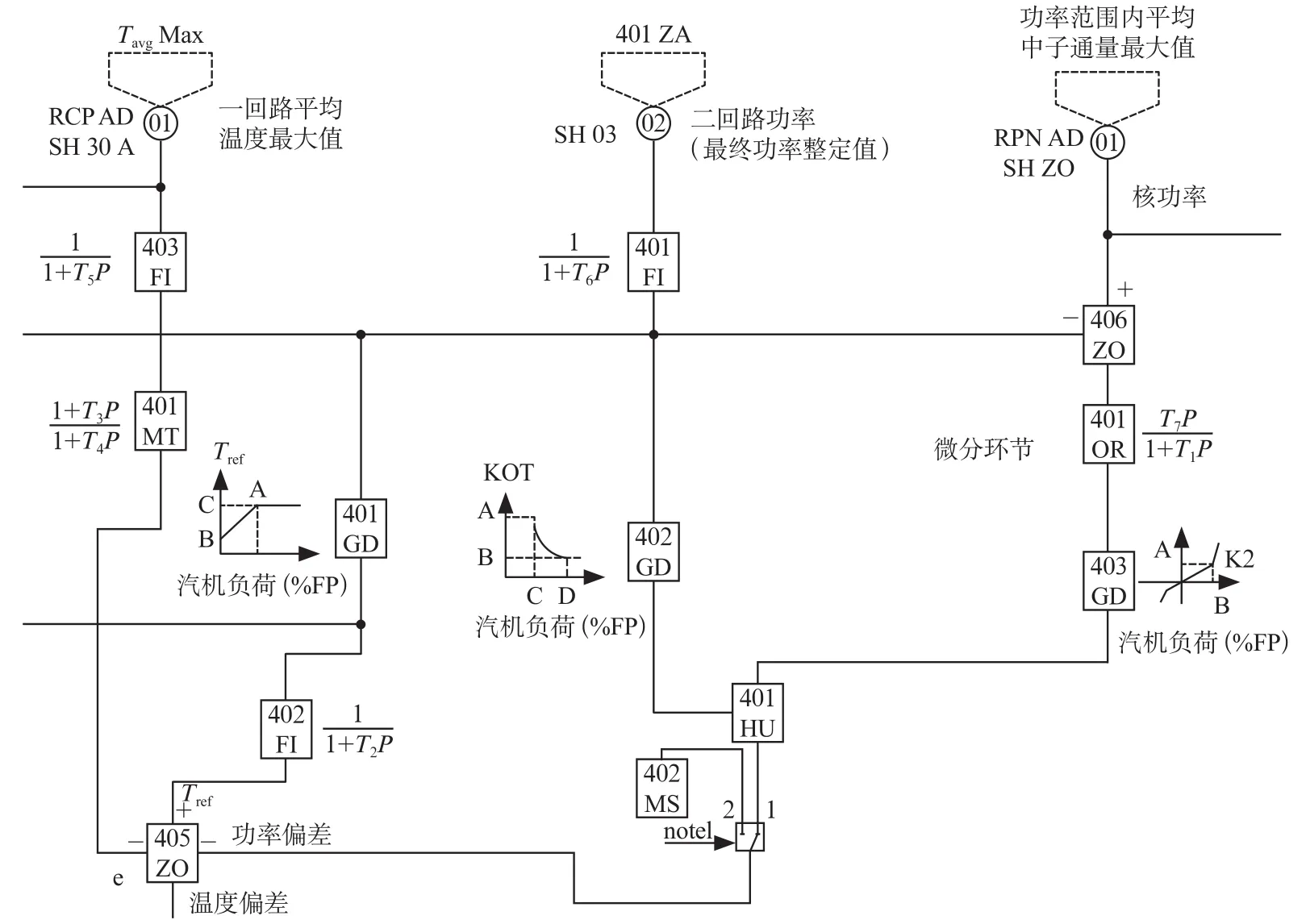
圖1 反應堆溫度控制系統原理
2 反應堆溫度控制系統的SIMULINK建模
MATLAB軟件是最常用的數學工具之一,SIMULINK是MATLAB語言環境下的一種面向對象的動態系統仿真平臺。使用SIMULINK可以非常方便地搭建仿真平臺,對動態系統進行建模、仿真以及分析。
一個典型的SIMULINK仿真系統如圖2所示。

圖2 典型的SIMULINK仿真系統
源模塊提供動態系統的輸入信號,可以是常數、函數發生器或用戶自定義的信號。系統模塊由動態系統的傳遞函數轉化而來,是仿真系統的數據處理部分。系統的輸出通過顯示模塊來接收,輸出顯示形式包括示波器、圖形或MATLAB工作空間。
反應堆溫度控制系統是一個典型的動態系統,在進行仿真之前,需要建立源模塊、系統模塊和顯示模塊。下面以此系統的設計手冊為基礎介紹使用SIMULINK仿真的過程。
2.1 源模塊的搭建
通過研究反應堆溫度控制系統的模擬圖可知,系統的輸入信號有3個,分別為:一回路平均溫度最大值、二回路功率及核功率。這些數據可以通過核電站的控制系統(DCS)數據庫來采集,獲得每個輸入量與時間的對應關系。
現以滿功率平臺甩負荷至廠用電實驗為例進行仿真。首先通過DCS數據庫獲取實驗前后的動態參數,在MATLAB工作空間(Workplace)新建動態數據表,并將數據復制到動態數據表中(第1列為時間,其他列為數據);然后在仿真模型編輯窗口新建來自工作空間(From Workplace)模塊,將模塊配置中數據來源修改為對應動態數據表的名稱;最后在仿真時此類數據就能夠正確加載到動態系統中。
2.2 系統模塊的搭建
SIMULINK中有豐富的數學模塊,在使用時需選擇合適的模塊。對于反應堆溫度控制系統來說,搭建仿真模型的主要工作是將慣性環節、超前滯后環節及函數發生器使用SIMULINK內部模塊來實現,配置參數,最后繪制模塊之間的信號線。

慣性環節的傳遞函數為:超前滯后環節的傳遞函數為:

式中:K為比例系數,τ為時間常數,s為復變量因子。對于慣性環節和超前滯后環節,使用線性傳遞函數模型(Transfer Fcn)來實現,并按照要求的格式輸入設計手冊中所確定的參數。對于函數發生器,可使用用戶自定義函數模塊(MATLAB Function)來實現。首先根據設計手冊中的函數發生器參數,確定函數方程,并按照規定格式輸入到自定義函數模塊中;然后將控制系統模擬圖中的各模塊配置完成后;最后根據系統設計手冊,使用信號線將各個模塊正確連接,即構成系統模塊。
2.3 顯示模塊的搭建
SIMULINK可提供豐富的輸出形式,在使用時需選擇合適的模塊。如需直觀看到數據的變化趨勢,可以選擇示波器模塊(Scope),以圖形方式顯示數據變化趨勢;如果需要直接獲取數據,方便后續處理,可以選擇輸出到工作空間模塊(To Workplace)。
為保證輸出結果的靈活性,在對反應堆溫度系統仿真中使用了輸出到工作空間模塊,將輸出結果以數組形式保存,并拷貝至Excel中,通過Excel繪圖功能將數據結果以圖形方式顯示。
在首次搭建過程中,建議將每一個動態過程的輸出都使用顯示模塊采集并輸出,方便后續調試。
通過以上3個步驟,動態系統仿真模型最終搭建完成,搭建完成的系統如圖3所示。
3 仿真系統的調試
仿真系統搭建完成后,需要對系統進行調試。在調試過程中,首先需要設定動態系統的初始狀態。因反應堆溫度控制系統存在慣性,若從仿真開始就立即輸入動態參數,將會導致仿真結果錯誤,這是因為慣性系統需要一定時間才能到達穩定狀態。
為了解決這個問題,應在各個輸入信號中加入延時時間。通過測試發現,工作空間的動態數據表是以折線函數方式進入動態系統的。通過此原理,可以在數據表首行加入延時行,以保證初始值能夠保持足夠時間,直至動態系統輸出到達穩定狀態。獲取延時時間的方法是:將所有輸入量的初始值作為常數輸入到動態系統,使用示波器模塊對動態系統的輸出進行監視,記錄輸出到達穩定狀態的時間,此時間即可作為輸入信號的延時時間。至此,仿真系統的初始狀態基本搭建完成,接下來就可以對系統進行仿真。進入仿真界面后,需要配置仿真參數,包括仿真起止時間及步長,此參數應當根據實際需求和設備性能綜合考慮。
4 仿真模型驗證
通過上述工作準備及仿真,最終得到滿功率平臺下反應堆溫度控制系統甩負荷至廠用電瞬態過程中各個中間量的變化過程。通過仿真結果可以看出,在瞬態試驗開始的前60 s,由于功率偏差通道e2正向輸出較大,導致綜合溫差持續為負。這與試驗結果中溫度控制棒在實驗開始前60 s以全速持續下插的結果相吻合,由此也驗證了仿真試驗的正確性。
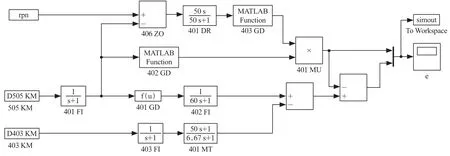
圖3 動態系統仿真模型
5 結論
通過使用SIMULINK仿真工具,對反應堆溫度控制系統進行了仿真,仿真結果與實際情況相符,證明整個仿真過程是實用、有效的。
然而,由于此系統并沒有與反應堆模型進行連接,輸入的數據也只是試驗后獲取的數據,此仿真系統并沒有做到真正的閉環驗證,所以不能用來進行預測性研究。有興趣的讀者可以將此仿真系統與RELAP5(美國INEL實驗室研制的通用系統瞬態行為分析程序)進行掛接,對反應堆的瞬態工況進行真正的閉環研究。不過,最重要的意義在于為技術人員提供了一種研究動態系統的方法,可為研究人員解決工程中所遇到的很多實際問題,具有科研推廣價值。
2016-06-08。
但成利(1982-),男,工程師,主要從事核電站儀表維護、DCS系統維護和管理、RGL棒控系統維護和管理等工作,email:danchengli@cgnpc.com,cn。
熊少勇(1987-),男,助理工程師,主要從事核電站儀表維護、RGL棒控系統維護和管理等工作。
白緒濤(1982-),男,高級工程師,主要從事核電站儀控設備維護及管理工作。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
