應(yīng)用于紅外搜索跟蹤和態(tài)勢感知系統(tǒng)的全景成像技術(shù)
2016-03-15 06:49:37張若嵐
紅外技術(shù) 2016年4期
關(guān)鍵詞:系統(tǒng)
陳 潔,張若嵐
?
應(yīng)用于紅外搜索跟蹤和態(tài)勢感知系統(tǒng)的全景成像技術(shù)
陳 潔1,2,張若嵐1,2
(1. 昆明物理研究所,云南 昆明 650223;2. 于起峰院士工作站,云南 昆明 650223)
本文指出紅外全景成像技術(shù)應(yīng)用于搜索跟蹤和態(tài)勢感知系統(tǒng)的優(yōu)勢,提出了該類系統(tǒng)的幾種主要全景成像方案,對各方案逐一介紹,列舉典型應(yīng)用實(shí)例說明,進(jìn)行技術(shù)分析,對比了幾種主要的全景成像方案的特點(diǎn)和應(yīng)用領(lǐng)域,概括了全景成像系統(tǒng)的支撐關(guān)鍵技術(shù),并展望發(fā)展趨勢。
全景成像;紅外搜索跟蹤系統(tǒng)(IRST);態(tài)勢感知;圖像拼接;步進(jìn)凝視
0 引言
全景成像(Panoramic Imaging,PI)采用特殊的成像裝置獲得水平或者垂直方向上的大于180°的半球視場或者360°的視場,被廣泛應(yīng)用于紅外搜索跟蹤和態(tài)勢感知系統(tǒng)[1]。
紅外搜索跟蹤系統(tǒng)(IRST)通過探測目標(biāo)的紅外輻射來實(shí)現(xiàn)在廣域空間內(nèi)對目標(biāo)進(jìn)行搜索與跟蹤,利用紅外被動(dòng)探測、便于隱身和探測概率高的優(yōu)勢,在強(qiáng)電子對抗的條件下,對無人機(jī)、隱身飛機(jī)、巡航彈、彈道導(dǎo)彈等各種軍事目標(biāo)有較強(qiáng)探測、識(shí)別能力。紅外搜索跟蹤系統(tǒng)早期主要用于對空的點(diǎn)目標(biāo)探測,現(xiàn)在類似的光電系統(tǒng)也被廣泛用于對周邊態(tài)勢的全景感知,即關(guān)注的是面目標(biāo)和全景成像。近年來,隨著對有關(guān)目標(biāo)、背景特性認(rèn)知程度的增加,以及光電傳感器、電子電路和軟件技術(shù)的快速發(fā)展和有關(guān)算法的改進(jìn),各種產(chǎn)品呈現(xiàn)出良好的發(fā)展前景[2]。
在分析總結(jié)紅外搜索跟蹤系統(tǒng)發(fā)展的基礎(chǔ)上,筆者歸納總結(jié)出該類系統(tǒng)全景成像技術(shù)方案如圖1所示,由圖1可見,紅外搜索跟蹤系統(tǒng)首先可根據(jù)其所選用的紅外探測器類型分為基于線列和凝視器件兩種,其中基于凝視型器件的系統(tǒng)可再細(xì)分為不同技術(shù)路線的產(chǎn)品,分別為:連續(xù)慢速掃描類、步進(jìn)凝視掃描類、反向掃描補(bǔ)償類、分布式孔徑類、全景光學(xué)鏡頭成像類以及數(shù)字TDI等多種類型系統(tǒng),從發(fā)展歷史和當(dāng)前產(chǎn)品分布看,紅外搜索跟蹤系統(tǒng)的關(guān)鍵技術(shù)發(fā)展可概述為從最初唯一的技術(shù)途徑只能采用線陣列器件進(jìn)行掃描周視探測發(fā)展到如今可根據(jù)具體情況(比如指標(biāo)要求、應(yīng)用特點(diǎn)、成本等)在以上提到的多種技術(shù)途徑中靈活選擇最適合的技術(shù)方案來實(shí)現(xiàn)廣域搜索跟蹤或全景態(tài)勢感知等功能,以下做詳細(xì)闡述。
1 按器件類型分
紅外搜索跟蹤系統(tǒng)第一個(gè)核心點(diǎn)在“紅外器件”選型,采用何種器件又反過來決定了系統(tǒng)的基本性能和全景成像方式。這里有幾個(gè)問題須得首先考慮:一是波段選擇,二是掃描或者凝視?三是制冷還是非制冷?等等,這些選項(xiàng)必須綜合權(quán)衡。
紅外探測波段的選擇需要綜合考慮探測器、目標(biāo)輻射、背景輻射、大氣衰減、材料和成本等多種因素。

圖1 紅外全景成像技術(shù)方案
某些情況下,各個(gè)因素對波段選擇的影響并不一致。這就更要求對各個(gè)因素進(jìn)行綜合分析,以做出最合適的選擇。探測某些目標(biāo)時(shí)選用兩個(gè)波段各有利弊,可能都是合理的。在某些應(yīng)用場合,中波探測比長波探測距離更遠(yuǎn)—些,而在另一些場合,長波探測比中波探測距離更遠(yuǎn)一些。這時(shí)就要再考慮其他方面的因素,如探測器的訂貨來源、系統(tǒng)的成本、光學(xué)材料的選擇和系統(tǒng)的復(fù)雜性要求等因素,以做出合理決策。
對一些常見的被測目標(biāo),可以參照以下方式選擇合適的探測波段:
1)對于近距應(yīng)用,如普通紅外安防監(jiān)控系統(tǒng)、手持紅外望遠(yuǎn)鏡和頭盔式熱像儀等,探測距離多在幾十米到2km之間,應(yīng)優(yōu)先采用非制冷長波探測。
2)對于濕度較高的應(yīng)用,如艦載光電系統(tǒng),由于這種環(huán)境下中波輻射的大氣透過率比長波的高很多,中波探測器的靈敏度也較高,因此,應(yīng)優(yōu)先選用中波紅外波段。但對于對抗掠海飛行的來襲導(dǎo)彈,由于水面波動(dòng)會(huì)形成很多小鏡面,中波產(chǎn)生的鏡面反射遠(yuǎn)高于長波,會(huì)對點(diǎn)目標(biāo)跟蹤帶來很大的影響,因此此類應(yīng)用還要考慮用長波,除非能有效濾除鏡面干擾。
3)對于空地、空空和地空遠(yuǎn)距離應(yīng)用,如果探測溫度在300K以下的低溫目標(biāo),由于此時(shí)目標(biāo)的長波輻射比較明顯,且傳輸路徑中水汽較少,透過率較高,應(yīng)優(yōu)先采用長波探測系統(tǒng)。如果探測中高溫目標(biāo),如飛機(jī)熱噴管、排氣管、尾焰等,此時(shí)目標(biāo)的中波輻射明顯,應(yīng)優(yōu)先采用中波探測系統(tǒng)。如果紅外系統(tǒng)自身在高速運(yùn)動(dòng),如導(dǎo)彈探測系統(tǒng)、機(jī)載光電偵察系統(tǒng)等,由于其窗口玻璃要承受很大的風(fēng)壓和氣動(dòng)加熱,目前沒有合適的長波光學(xué)材料,因此也應(yīng)該采用中波探測系統(tǒng)。
4)對于地面遠(yuǎn)距離應(yīng)用,背景輻射大多比較復(fù)雜,大氣傳輸路徑較長。如果環(huán)境濕度較高,一般應(yīng)考慮采用中波探測。如果環(huán)境濕度較低,可以考慮采用長波探測,但需要綜合分析目標(biāo)輻射、背景輻射等因素。
5)對于某些紅外系統(tǒng),可以同時(shí)選用兩個(gè)波段甚至多波段進(jìn)行探測,通過融合分析多波段紅外圖像,更有利于識(shí)別目標(biāo),也會(huì)使系統(tǒng)具有更好的抗干擾能力[3]。
回望IRST的發(fā)展歷史,囿于器件發(fā)展水平,早期產(chǎn)品以采用長波制冷線列探測器為主,該類系統(tǒng)性能受限于積分時(shí)間和全景幀更新頻率;隨著技術(shù)發(fā)展,凝視型紅外焦平面探測器批量應(yīng)用以來,國內(nèi)外相關(guān)企業(yè)都圍繞基于該類型器件的紅外搜索跟蹤系統(tǒng)展開研究。相比線列探測器十幾μs的積分時(shí)間,凝視器件的積分時(shí)間可長達(dá)幾個(gè)ms量級(jí),從而使投射到探測器上的能量大幅增加,提高了圖像的信噪比和系統(tǒng)作用距離,因而基于凝視器件的紅外搜索跟蹤系統(tǒng)越來越受到各國重視。凝視型探測器逐漸在擴(kuò)大應(yīng)用中,非制冷器件在該領(lǐng)域也逐漸有了用武之地。
長波凝視焦平面探測器仍是碲鎘汞器件性能最佳[4],但碲鎘汞材料制造大規(guī)模陣列的技術(shù)難度較大,工藝復(fù)雜,成本極高。近年,同樣應(yīng)用于長波的量子阱器件有較大突破,具有價(jià)格低的巨大優(yōu)勢,能有效降低系統(tǒng)成本,在低成本方案中可以考慮應(yīng)用。
2 幾種主要的全景成像技術(shù)方案介紹
由于早些時(shí)候凝視型紅外焦平面探測器還不成熟,紅外搜索跟蹤系統(tǒng)基本都是基于線列探測器進(jìn)行設(shè)計(jì),因此無論國外還是國內(nèi)基本都是采用線掃描方案進(jìn)行構(gòu)型的,具體見2.1節(jié)描述;凝視器件發(fā)展起來后,則有了更多基于凝視焦平面器件的應(yīng)用,詳見2.2~2.7節(jié)。
2.1 線掃描方案
圖1中第1種系統(tǒng)為線掃描方式,該類方式是用得最早的一種紅外搜索跟蹤系統(tǒng)方式,系統(tǒng)采用制冷型長波線列紅外探測器(如288×4),系統(tǒng)工作在全景模式時(shí),通過轉(zhuǎn)臺(tái)方位向的連續(xù)旋轉(zhuǎn)將周圍景物的紅外輻射順序投射到探測器上以實(shí)現(xiàn)全景成像,如圖2[5]所示。當(dāng)系統(tǒng)工作在前視紅外(FLIR)模式時(shí),掃描轉(zhuǎn)臺(tái)轉(zhuǎn)變?yōu)樵婆_(tái)工作模式,紅外成像系統(tǒng)工作在熱像儀的狀態(tài),通過內(nèi)部一個(gè)快速擺鏡來完成在視場內(nèi)的橫向空間解析[6]。
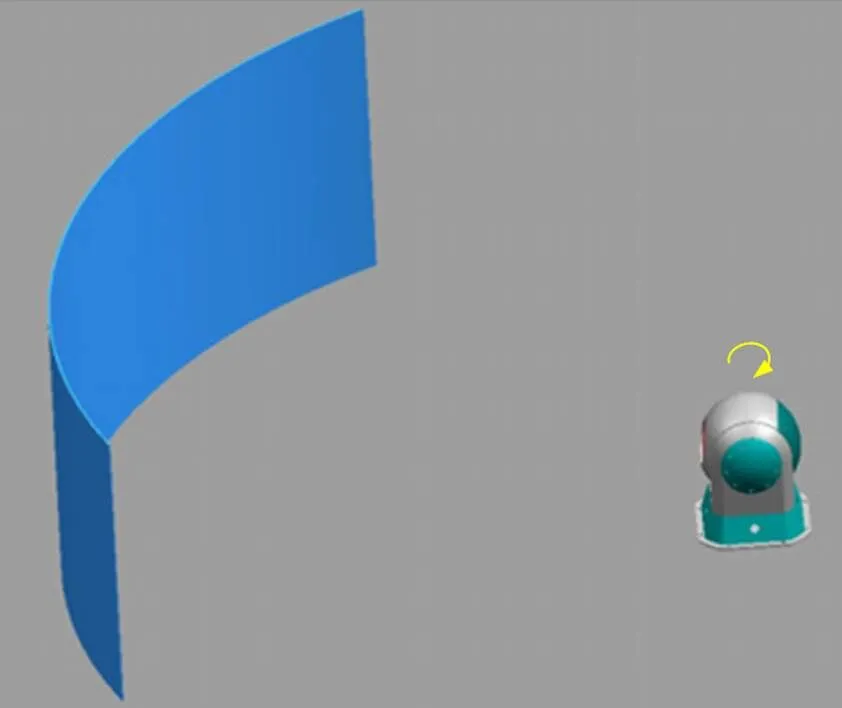
圖2 線掃描紅外搜索跟蹤系統(tǒng)示意圖
該類系統(tǒng)主要應(yīng)用于定點(diǎn)布放或者移動(dòng)平臺(tái)實(shí)時(shí)對空搜跟等,近年來隨著凝視系統(tǒng)的應(yīng)用日益廣泛,更多地用于末端防御和要地防空等場合。
國外典型例子是Thales UK公司為英國陸軍研制的ADAD“防空告警裝置”(Air Defense Alerting Device),如圖3[7]所示,其核心器件為制冷長波線列型碲鎘汞紅外探測器。ADAD最先研制是基于陸軍應(yīng)用,后來根據(jù)實(shí)際需要研制了各種改進(jìn)型,應(yīng)用領(lǐng)域擴(kuò)張到海軍(ARISE“區(qū)域可重構(gòu)紅外掃描設(shè)備”Area Reconfigurable Infrared Scanner Equipment)和空軍(PIRATE)。
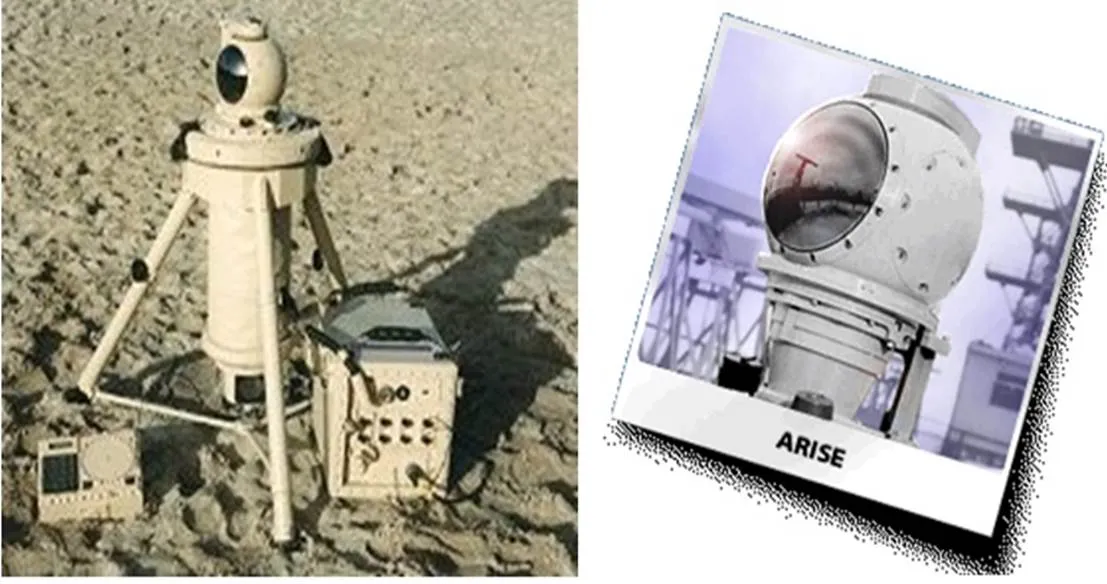
圖3 ADAD(左)和ARISE(右)紅外搜索跟蹤系統(tǒng)
2.2 凝視器件慢速掃描方案
為了獲得360°的全景圖像,需要一個(gè)無限大的像平面,物理上很難實(shí)現(xiàn)。隨著計(jì)算機(jī)技術(shù)和數(shù)字圖像傳感器的發(fā)展,對數(shù)字相機(jī)繞其光軸旋轉(zhuǎn)所拍得的序列圖像進(jìn)行無縫拼接,既可以獲得人工合成的全景圖像,也可以采取圍繞一個(gè)固定點(diǎn)安裝多個(gè)攝像機(jī),使得攝像機(jī)的全部視場加起來形成全景視場,由于凝視器件在進(jìn)行快速掃描時(shí)會(huì)造成圖像拖尾,如果不增加補(bǔ)償環(huán)節(jié),只能選用慢速掃描方式,即控制掃描平臺(tái)轉(zhuǎn)速在一定范圍,以達(dá)到凝視器件的每個(gè)積分時(shí)間內(nèi)存在的圖像拖尾在可接受域,通過一個(gè)個(gè)的凝視視場拼接來完成全景成像,圖4[8]所示為這種系統(tǒng)的基本構(gòu)型。

該類系統(tǒng)由于只能在轉(zhuǎn)臺(tái)低速轉(zhuǎn)動(dòng)時(shí)進(jìn)行探測器積分,使得積分時(shí)間也受限制,因此只能用于低端或輕小型應(yīng)用,多用于民用近距離定點(diǎn)監(jiān)控,布放在機(jī)場、監(jiān)獄或其他敏感區(qū)域等。
2.3 步進(jìn)凝視掃描方式
這是慢速掃描模式的升級(jí)改善版,為了彌補(bǔ)凝視器件在進(jìn)行連續(xù)掃描時(shí)造成圖像拖尾,使得系統(tǒng)傳遞函數(shù)降低,全景掃描速度受限這一缺陷,可以采用基于步進(jìn)凝視的掃描方式,即在保持方位向全景掃描的同時(shí)盡量保證在凝視器件的每個(gè)積分時(shí)間內(nèi)場景相對固定,通過一個(gè)個(gè)的凝視視場拼接來完成全景成像,如圖5[5]所示。
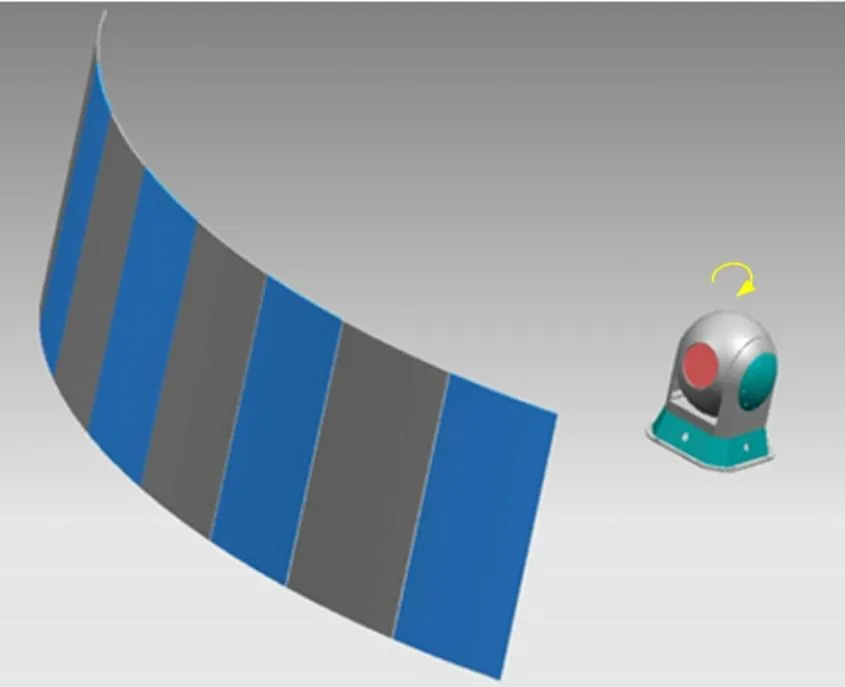
圖5 步進(jìn)凝視紅外搜索跟蹤系統(tǒng)示意圖
為實(shí)現(xiàn)步進(jìn)凝視,在具體系統(tǒng)設(shè)計(jì)上也有2種選擇,一種是采用掃描平臺(tái)直接在掃描方向上進(jìn)行步進(jìn)控制,即在360°范圍內(nèi)不停地快啟快停,在每一個(gè)停止時(shí)刻進(jìn)行凝視采樣,從而實(shí)現(xiàn)步進(jìn)掃描的目的。由于在工程實(shí)現(xiàn)上想徹底做到快速停止再快速啟動(dòng)不太可能,因此通常考慮采用不等速運(yùn)動(dòng),如圖6[5]所示,系統(tǒng)在圖像采集的瞬間使掃描運(yùn)動(dòng)平臺(tái)低速運(yùn)行,完成積分圖像采集后,運(yùn)動(dòng)平臺(tái)迅速加速,在到達(dá)下一個(gè)圖像采集位置前即開始減速,速度降低后開始下一幅圖像的采集,如此周期步進(jìn)即可得到全景圖像,成像質(zhì)量可接近于凝視成像。

圖6 變速掃描示意圖
由于該方式是對整個(gè)傳感頭進(jìn)行變速控制,因此傳感頭的轉(zhuǎn)動(dòng)慣量不能太大,全景幀頻也很難提高,且和慢速連續(xù)掃描的方案一樣只能在轉(zhuǎn)臺(tái)低速轉(zhuǎn)動(dòng)時(shí)進(jìn)行探測器積分,使得積分時(shí)間也受限制,同樣只能用于低端或輕小型應(yīng)用。
昆明物理研究所正在研發(fā)中的“慧眼”(iEye)便攜式小型全景成像態(tài)勢感知系統(tǒng)正是該類系統(tǒng)的應(yīng)用實(shí)例,圖7所示為系統(tǒng)傳感頭,集成了非制冷長波熱像、低照度CMOS成像傳感器,系統(tǒng)看上去像一個(gè)普通的小光電轉(zhuǎn)塔,但實(shí)際上是通過高速啟停的步進(jìn)掃描來實(shí)現(xiàn)全景成像或動(dòng)態(tài)局域圖像。

圖7 昆明物理研究所研發(fā)中的iEye產(chǎn)品
2.4 反向掃描補(bǔ)償方式
另一種步進(jìn)凝視方式是采用帶補(bǔ)償鏡的方式實(shí)現(xiàn)步進(jìn)全景成像,其主要原理是在光路中加入一塊相對于掃描平臺(tái)進(jìn)行反向掃描的補(bǔ)償反射鏡,通過反射鏡的反向掃描來補(bǔ)償掃描平臺(tái)的轉(zhuǎn)動(dòng),當(dāng)掃描平臺(tái)轉(zhuǎn)過一個(gè)凝視視場時(shí),補(bǔ)償鏡再快速回到初始位置,以進(jìn)行下一個(gè)凝視視場的補(bǔ)償,如圖8所示。如此周期步進(jìn)即可得到全景圖像,成像質(zhì)量可接近于凝視成像。

圖8 補(bǔ)償掃描示意圖
由于該方式只需要控制反射鏡進(jìn)行快速擺動(dòng),因此比變速掃描方式的控制對象要輕小許多,可以實(shí)現(xiàn)快速全景掃描,且由于在反射鏡進(jìn)行差動(dòng)補(bǔ)償期間大部分時(shí)間都可以用于積分,因此可以獲得更好的能量累積,該方式也是目前國內(nèi)外基于凝視器件的中高端全景成像系統(tǒng)的首選方式。
一個(gè)典型例子是法國Sagem公司研制的新一代海軍紅外搜索跟蹤系統(tǒng)EOMS NG,如圖9[9]所示。該系統(tǒng)為原“旺皮爾(VAMPIR)”MB系統(tǒng)的升級(jí)產(chǎn)品。其中,系統(tǒng)的紅外圖像由一臺(tái)中波焦平面紅外熱像儀通過快速步進(jìn)機(jī)構(gòu)進(jìn)行周視掃描來提供,圖像采集速率高達(dá)100Hz,整個(gè)系統(tǒng)預(yù)警距離是原MB系列產(chǎn)品的1.5倍。

圖9 EOMS NG紅外搜索跟蹤系統(tǒng)
同為法國Sagem公司研制的DS全景成像傳感器是另一個(gè)典型應(yīng)用實(shí)例,已投入艦載實(shí)用的系統(tǒng)實(shí)物照片如圖10[9]所示。

圖10 Sagem DS全景成像傳感器
圖11[9]給出了該系統(tǒng)的光學(xué)示意圖。由圖中可見,該系統(tǒng)采用一個(gè)被稱作Training scanner的機(jī)構(gòu)進(jìn)行圖像校正補(bǔ)償,實(shí)現(xiàn)全景成像。
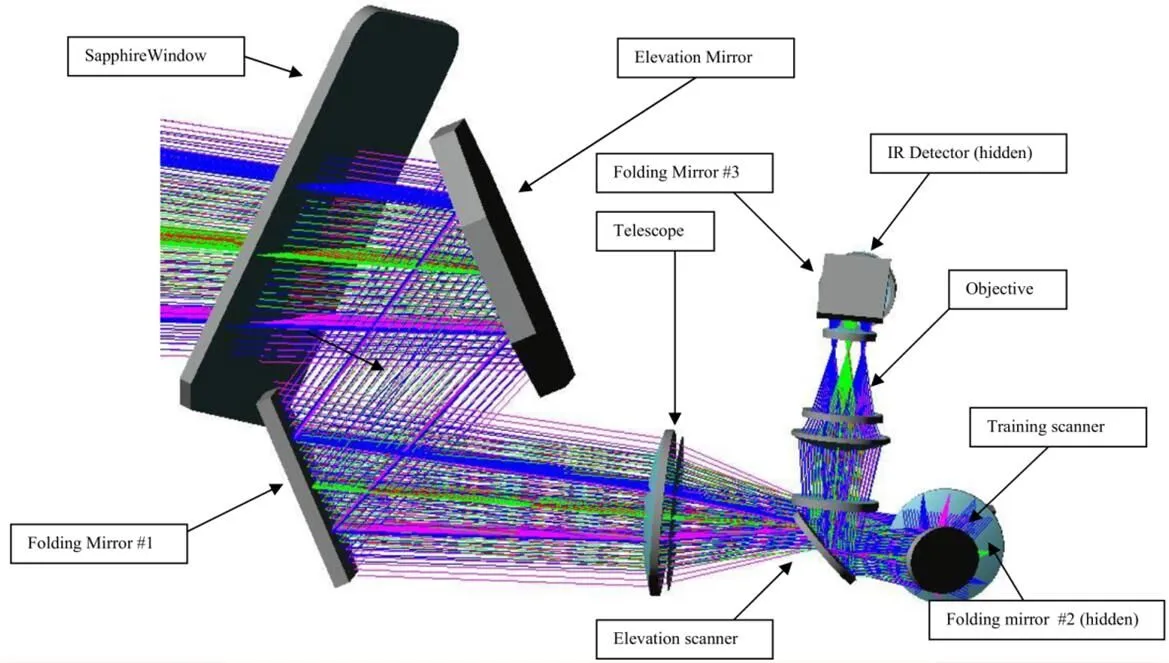
圖11 Sagem DS全景成像傳感器光學(xué)系統(tǒng)示意圖
一般采用擺鏡做補(bǔ)償?shù)南到y(tǒng),全景幀頻可達(dá)到1~2Hz左右,比如2014年法國HGH公司推出的高分辨率中波紅外廣域監(jiān)視系統(tǒng)——Spynel-X8000,如圖12[10]所示,該系統(tǒng)包括一個(gè)每秒旋轉(zhuǎn)一周的360°全方位旋轉(zhuǎn)傳感器,采用1280×1024探測器,全景掃描速度為每秒2幀,單幀幀頻60Hz。

圖12 HGH公司的紅外廣域監(jiān)視系統(tǒng)——Spynel-X8000
若要進(jìn)一步提高全景圖像幀頻,采用如前所述的擺鏡步進(jìn)凝視運(yùn)動(dòng)方案已經(jīng)不敷應(yīng)用。比如想要IRST工作在10~12Hz幀頻的話,擺鏡的加速度將高達(dá)30000rad/s2,這已超出了擺鏡運(yùn)動(dòng)的穩(wěn)定帶寬極限,會(huì)導(dǎo)致系統(tǒng)穩(wěn)定波動(dòng)大到難以恢復(fù),對系統(tǒng)PSF的影響將是不可接受的。為了消除這種影響,意大利Selex ES公司設(shè)計(jì)實(shí)現(xiàn)了另一種掃描補(bǔ)償方式。掃描系統(tǒng)利用一個(gè)有專利支撐的特殊機(jī)構(gòu)設(shè)計(jì)掃描覆蓋關(guān)注區(qū)域,保持積分時(shí)間內(nèi)光軸穩(wěn)定。如圖13~15[11]所示,掃描系統(tǒng)采用兩個(gè)轉(zhuǎn)鼓做連續(xù)旋轉(zhuǎn)運(yùn)動(dòng),其中第一個(gè)掃描轉(zhuǎn)鼓帶動(dòng)多個(gè)反射面勻速旋轉(zhuǎn)產(chǎn)生掃描運(yùn)動(dòng),第二個(gè)多邊形去拖尾轉(zhuǎn)鼓則以與掃描轉(zhuǎn)鼓反向的同步速度旋轉(zhuǎn),在積分時(shí)間內(nèi)消除光軸位移。圖13[11]表示掃描轉(zhuǎn)鼓通過5個(gè)分視場序列掃描獲得完整視場。
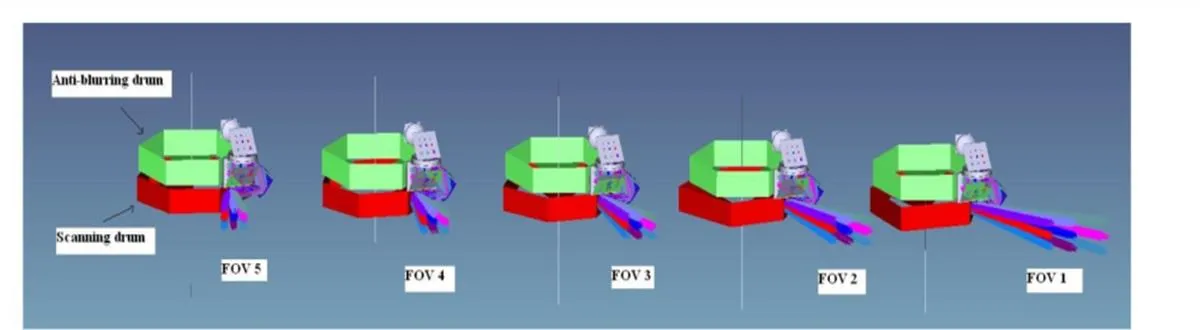
圖13 掃描轉(zhuǎn)鼓掃描序列示意圖
掃描轉(zhuǎn)鼓和去拖尾轉(zhuǎn)鼓的相應(yīng)面配合完成每幀采樣運(yùn)動(dòng),圖14[11]示意了兩種轉(zhuǎn)鼓的外形,圖(a)所示掃描轉(zhuǎn)鼓的單面尺寸有差異以獲得全視場覆蓋,圖(b)所示的去拖尾轉(zhuǎn)鼓則是一個(gè)均勻的六邊形外形,以獲得同樣的光軸穩(wěn)定性能。圖15[11]展示了利用這種掃描補(bǔ)償方式獲得的穩(wěn)定的全景圖像。

圖14 掃描轉(zhuǎn)鼓(a)和去拖尾轉(zhuǎn)鼓(b)

圖15 利用轉(zhuǎn)鼓掃描補(bǔ)償方式獲得的全景圖像
2.5 分布孔徑方式
分布式孔徑系統(tǒng)也是全景成像的一個(gè)研究熱點(diǎn)之一,其中心思想是通過多個(gè)不同的成像孔徑進(jìn)行全景空間解析,也即通過孔徑數(shù)來消除掃描機(jī)構(gòu)或降低掃描壓力,同時(shí)也降低了系統(tǒng)的復(fù)雜性,提高了全景態(tài)勢感知的實(shí)時(shí)性,但需要為此付出多光路多探測器帶來的成本提升。
法國Thales公司研制的第二代艦載紅外搜索跟蹤系統(tǒng)是該類型系統(tǒng)的典型代表。全景紅外成像頭由3個(gè)子成像傳感頭組成,每個(gè)子成像傳感頭采用分布式孔徑成像原理,利用一個(gè)640×512中波焦平面探測器,通過一個(gè)特殊的7段視場光學(xué)掃描機(jī)構(gòu)覆蓋120°水平視場,在保證足夠的圖像空間分辨率的前提下,實(shí)現(xiàn)了120°大范圍的視場搜索,通過3個(gè)子傳感頭圍繞桅桿分布安置即可覆蓋360°搜索視場,系統(tǒng)如圖16[12]所示。

圖16 Thales公司的第二代艦載紅外搜索跟蹤系統(tǒng)
2.6 全景光學(xué)鏡頭成像方式
傳統(tǒng)的成像設(shè)備基于中心投影法,是人眼觀察外部世界的方式,也是針孔相機(jī)的成像方式,魚眼透鏡和折反射透鏡利用光學(xué)手段實(shí)現(xiàn)全景成像,其中魚眼透鏡和2.1~2.3節(jié)所述的各種旋轉(zhuǎn)拼接法符合人眼視覺的中心投影法原理,折反射全景成像則是屬于環(huán)帶成像,即柱面映射投影。
魚眼透鏡可有效地實(shí)現(xiàn)大視場,魚眼透鏡實(shí)際上是超廣角物鏡,超廣角物鏡由于有非常短的焦距,通常焦距小于16mm,因此能獲得接近半球或者大于半球的全景視場,在獲得大視場的同時(shí),魚眼透鏡的設(shè)計(jì)者必須做出犧牲,即允許桶形畸變的存在,結(jié)果是除了圖像中心的景物保持不變,其它本應(yīng)水平和垂直的景物沿各個(gè)方向從中心向外輻射,缺陷是所得到的圖像仍然需要拼接, 成像機(jī)理仍然是中心投影法。
為了克服中心投影法的缺陷,人們提出了平面圓柱投影法,在三維空間視場和有限的二維像平面建立了一種新的投影關(guān)系,即將三維圓柱區(qū)域通過特殊的系統(tǒng)投影到二維平面的圓環(huán)區(qū)域。圖17[13]所示為一種全向相機(jī)及其成像結(jié)果。
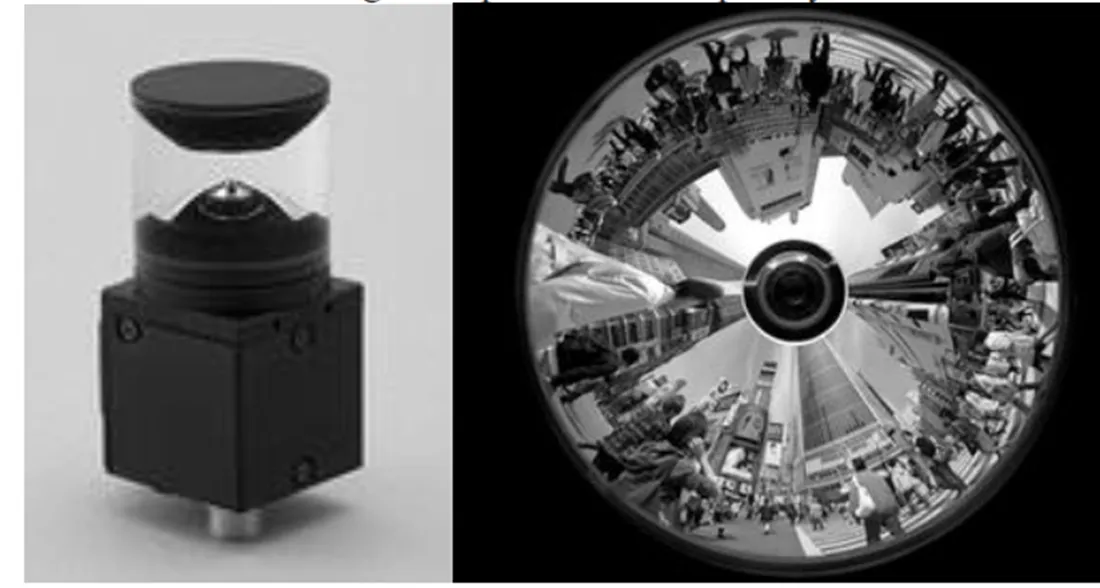
圖17 一種全向相機(jī)(左)及其成像結(jié)果(右)
2.7 數(shù)字TDI全景成像系統(tǒng)
南京理工大學(xué)何偉基等人的發(fā)明專利公開了一種Snapshot型面陣紅外探測器TDI掃描成像方法,在面陣型紅外焦平面陣列前安裝一光機(jī)掃描結(jié)構(gòu),由光機(jī)掃描來控制圖像的移動(dòng)。將紅外焦平面陣列得到的平移后的圖像輸入到數(shù)據(jù)累加處理電路,進(jìn)行圖像移位累加處理,得到所需圖像。數(shù)據(jù)累加處理電路主要由采樣電路和數(shù)字處理電路兩部分組成,通過FPGA控制AD器件進(jìn)行采樣來完成模數(shù)轉(zhuǎn)換。在完成模數(shù)轉(zhuǎn)換后,將數(shù)字圖像信號(hào)輸入數(shù)字處理電路,由數(shù)字處理電路進(jìn)行圖像的移位累加,最后輸出所需的圖像。本發(fā)明消除了在搜索系統(tǒng)中使用面陣探測器時(shí)由于探測器轉(zhuǎn)動(dòng)帶來的拖尾現(xiàn)象,提高了圖像的信噪比,利于在目標(biāo)搜索跟蹤系統(tǒng)中及時(shí)地發(fā)現(xiàn)弱小目標(biāo)。上海技術(shù)物理研究所蘇曉鋒發(fā)表了名為《紅外面陣探測器DTDI技術(shù)性能分析》的文章,文中技術(shù)方案目前還未見到真實(shí)的樣機(jī)報(bào)道。
2.8 其他全景成像系統(tǒng)
最近幾年全景成像技術(shù)成為開發(fā)熱點(diǎn),通過各種技術(shù)途徑實(shí)現(xiàn)的產(chǎn)品很多,典型實(shí)例見圖18[14]所示HGH公司的Spynel-M系列產(chǎn)品,是該公司近年來推出的一款輕小型全景成像系統(tǒng),盡管未見詳細(xì)報(bào)道其采用的技術(shù)方案,但其產(chǎn)品頗具特色,外包絡(luò)尺寸小于12×20cm,重量僅1.8kg,采用非制冷凝視焦平面探測器,可持續(xù)監(jiān)視360°全景范圍,全景幀周期為1s。單個(gè)Spynel-M可有效實(shí)施1.5km方圓范圍內(nèi)人員入侵預(yù)警,實(shí)現(xiàn)實(shí)時(shí)安防監(jiān)控。

圖18 法HGH公司出品的Spynel-M產(chǎn)品
3 全景成像技術(shù)方案分析比較
3.1 關(guān)于分布式孔徑方案
最典型的分布式孔徑應(yīng)用實(shí)例是F-35機(jī)上的被動(dòng)式探測系統(tǒng):EODAS(electro-optical distributed aperture system),光電分布式孔徑系統(tǒng),是美國諾格公司為四代機(jī)設(shè)計(jì)的內(nèi)置綜合光電設(shè)備。它能為飛行員提供一個(gè)圍繞飛機(jī)機(jī)身的全景視野,飛行員能夠“看透”飛機(jī)的底部和側(cè)面,主要用途范圍是對空作戰(zhàn)。
如圖19、20[15]所示,該分布孔徑系統(tǒng)在機(jī)身6處不同的位置上各安置一紅外傳感器(圖21[15]所示),分別負(fù)責(zé)飛機(jī)的左側(cè)、右側(cè)、機(jī)背前方、機(jī)背后方、機(jī)腹前方、機(jī)腹后方的視野,使用先進(jìn)的信號(hào)處理運(yùn)算法,對全機(jī)360°范圍內(nèi)來襲的導(dǎo)彈或逼近的飛機(jī)進(jìn)行紅外探測及跟蹤,并將探測畫面顯示于飛行員的頭盔顯示器上,讓飛行員能夠看見飛機(jī)周圍的空域情況,因此除了讓飛行員具備全空域態(tài)勢感知外,也能提供導(dǎo)航、導(dǎo)彈警告、以及紅外搜索與跟蹤的功能。

圖19 F35 EODAS分布位置示意圖

圖20 DAS各分布孔徑功能示意圖
分布孔徑系統(tǒng)集成多個(gè)傳感器用于周邊進(jìn)行態(tài)勢感知,具備隱身性能好,響應(yīng)時(shí)間短,實(shí)時(shí)性好,全景幀頻高等優(yōu)點(diǎn),缺陷是整個(gè)系統(tǒng)體積龐大,且由于傳感器眾多,系統(tǒng)成本很高。故該種成像方式多在機(jī)載或艦載應(yīng)用場合出現(xiàn)。車載方案也有應(yīng)用,通常基于成本考慮,多選擇非制冷紅外、低照度電視和普通CCD等低成本傳感器,用于武器平臺(tái)的態(tài)勢感知沒問題。但如果用于火控系統(tǒng),作用距離難以滿足要求,而采用制冷型紅外探測器又會(huì)使整個(gè)系統(tǒng)成本急劇上升。另外由于系統(tǒng)體積龐大,將各個(gè)傳感器分布在車輛周邊,需要整車深度配合,不容易進(jìn)行整車集成。
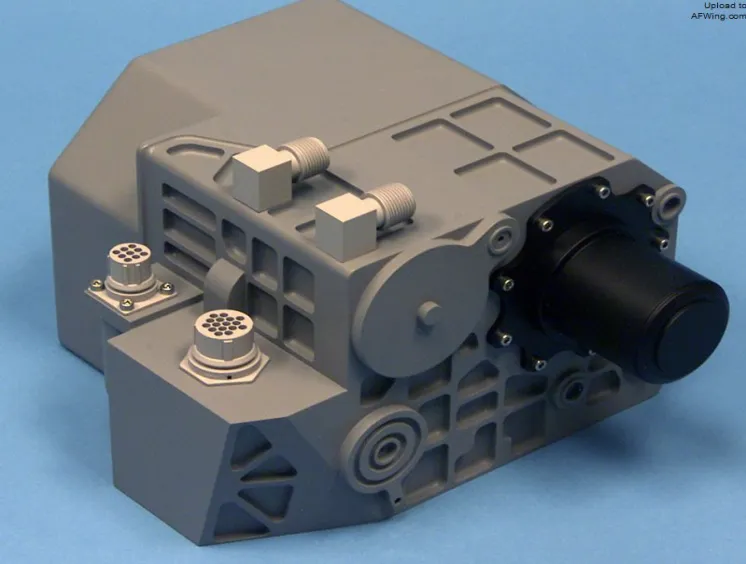
圖21 EODAS所用紅外傳感器
3.2 關(guān)于全景光學(xué)鏡頭成像方案
全景光學(xué)鏡頭成像方式由于無需運(yùn)動(dòng)部件,即能獲得360°的大視場,在很多場合發(fā)揮著重要的作用,其中以魚眼透鏡為代表的超廣角全景成像技術(shù)已經(jīng)非常成熟,技術(shù)上很難再有新的突破。折反射全景成像系統(tǒng)還有很大發(fā)展空間,故越來越受到重視,其中全景環(huán)形透鏡由于其小型化和集成化的優(yōu)點(diǎn)將會(huì)得到更為廣泛的應(yīng)用。但這種全景成像方式的最大弊端是受凝視面陣像元數(shù)限制,空間分辨率相對較低。預(yù)計(jì)在超大面陣器件技術(shù)有突破時(shí)能有更長足的應(yīng)用發(fā)展。
3.3 關(guān)于線掃描和步進(jìn)凝視掃描方案的比較
線掃描和步進(jìn)凝視掃描是目前中端紅外搜索跟蹤系統(tǒng)采用最多的兩種方案,其中由于線列型紅外探測器出現(xiàn)較早的原因,早期的搜索跟蹤系統(tǒng)均是這一類型,步進(jìn)凝視型搜索跟蹤系統(tǒng)是隨制冷紅外面陣器件工程化后才出現(xiàn)的新體制全景系統(tǒng),下面針對幾個(gè)關(guān)鍵環(huán)節(jié)進(jìn)行這兩種類型全景系統(tǒng)的比較。
1)作用距離的比較
紅外搜索跟蹤系統(tǒng)的作用距離和目標(biāo)輻射功率、背景大氣條件、紅外光學(xué)系統(tǒng)性能以及探測器特性等因素密切相關(guān),假定其他條件相同,系統(tǒng)空間截止頻率高低對系統(tǒng)作用距離起決定性作用。
在紅外成像系統(tǒng)中,其空間截止頻率由探測器決定,而探測元的中心距離決定了探測器的空間截止頻率。由于線列掃描型FPA行與行探測元的中心距離,可以通過錯(cuò)開排列而連續(xù)減小直至到零,所以FPA有足夠高的空間截止頻率。通過增加參加TDI的探測元的數(shù)量,可以提高線列FPA的熱靈敏度,這使得帶時(shí)間延遲積分(time delay integration,TDI)功能的掃描型FPA的熱靈敏度和空間分辨率得以很好的平衡。在系統(tǒng)設(shè)計(jì)中,當(dāng)要求某一個(gè)方向有足夠大的視場、而空間分辨率又不能很低時(shí),采用線列FPA就是一個(gè)很好的選擇。
凝視型FPA探測元的中心距離必須大于少數(shù)載流子橫向擴(kuò)散長度,否則就會(huì)產(chǎn)生串音。因此,探測元之間的溝道也就決定了凝視型FPA的空間截止頻率。由于凝視型FPA的探測元不能錯(cuò)開排列,所以探測元的中心間距大于掃描型FPA的,表現(xiàn)在FPA的調(diào)制傳遞函數(shù)上,就是空間截止頻率低于掃描型FPA。在實(shí)際應(yīng)用中,中等規(guī)模(254×254、320×240、384×288)的凝視型FPA成像有比較明顯的馬賽克效應(yīng)[16]。
在長波波段,線掃描系統(tǒng)能量足夠的情況下,若采用較長線列的掃描型FPA,比如576、768或1024以上系列,空間分辨率優(yōu)于當(dāng)前主流的640×512凝視探測器,故作用距離更遠(yuǎn),對空搜索小目標(biāo)占優(yōu)。但其他波段則不然,詳見以下分析。
2)能量的比較
線掃描型搜索跟蹤系統(tǒng)由于需要連續(xù)將周圍場景的紅外輻射信號(hào)投射到線列探測器上,因此導(dǎo)致入射信號(hào)在每個(gè)探測器單元上駐留的時(shí)間(即積分時(shí)間)較短,通常只有十幾個(gè)微秒(取決于周視幀頻),為了得到足夠的靈敏度,一方面采用TDI的方式在掃描方向進(jìn)行能量的延時(shí)積分,可以一定程度彌補(bǔ)能量的不足,另外需要確保足夠的探測器像元面積,通過增加光敏面積提高信噪比;而步進(jìn)凝視系統(tǒng)采用面陣器件,積分時(shí)間可以高達(dá)幾毫秒到幾十毫秒量級(jí)(取決于周視幀頻),很好地保證了能量累積,有利于系統(tǒng)信噪比及系統(tǒng)的極限作用距離兩項(xiàng)核心指標(biāo)的提升,并且在能量足夠的前提下可以進(jìn)一步減小探測器面元尺寸以達(dá)到減小系統(tǒng)體積的目的。另外,即使將凝視器件本身的幀頻調(diào)整到100Hz以上依然可以保證有幾個(gè)毫秒的積分時(shí)間,從而步進(jìn)凝視系統(tǒng)的全景掃描時(shí)間可以減小到1s以內(nèi)(前提是補(bǔ)償反射鏡的控制響應(yīng)能跟上),在掃描速度上潛力巨大,而線掃描體制下器件積分時(shí)間已經(jīng)很短,限制了進(jìn)一步提高掃描速度的可能性。正是由于能量方面的巨大優(yōu)勢,步進(jìn)凝視搜索跟蹤系統(tǒng)也越來越受到重視。
3)搜索效率的比較
線掃描方案的工作機(jī)制決定了該類型搜索跟蹤系統(tǒng)對目標(biāo)的搜索效率不如步進(jìn)凝視型的高。圖22和圖23是一種極限情況對比,如果采用線掃描方案,假如在0時(shí)刻時(shí)場景中沒有發(fā)生特殊狀況,而1時(shí)刻時(shí)在剛掃過的區(qū)域出現(xiàn)緊急情況,線掃描系統(tǒng)只有在下一次掃過時(shí)才能發(fā)現(xiàn)狀況,最大延遲長達(dá)一個(gè)幀周期(通常是秒的量級(jí)),而如果是步進(jìn)凝視系統(tǒng),假如凝視期間正好掃描到該區(qū)域,就可以及時(shí)發(fā)現(xiàn)緊急情況,在如圖22和圖23的極限情況下,步進(jìn)凝視系統(tǒng)的響應(yīng)時(shí)間可以比線掃描系統(tǒng)提前近一個(gè)幀周期(相同的系統(tǒng)幀頻條件下)。盡管相同幀頻的情況下線掃描型和步進(jìn)凝視型2種系統(tǒng)掃描一周所需要的時(shí)間相等,但由于系統(tǒng)機(jī)制的不同,對突發(fā)事件的捕捉能力步進(jìn)凝視系統(tǒng)會(huì)更占優(yōu),尤其面對瞬息萬變的戰(zhàn)場局勢時(shí),哪怕是能夠搶占一點(diǎn)先機(jī)有時(shí)也是決定性的。
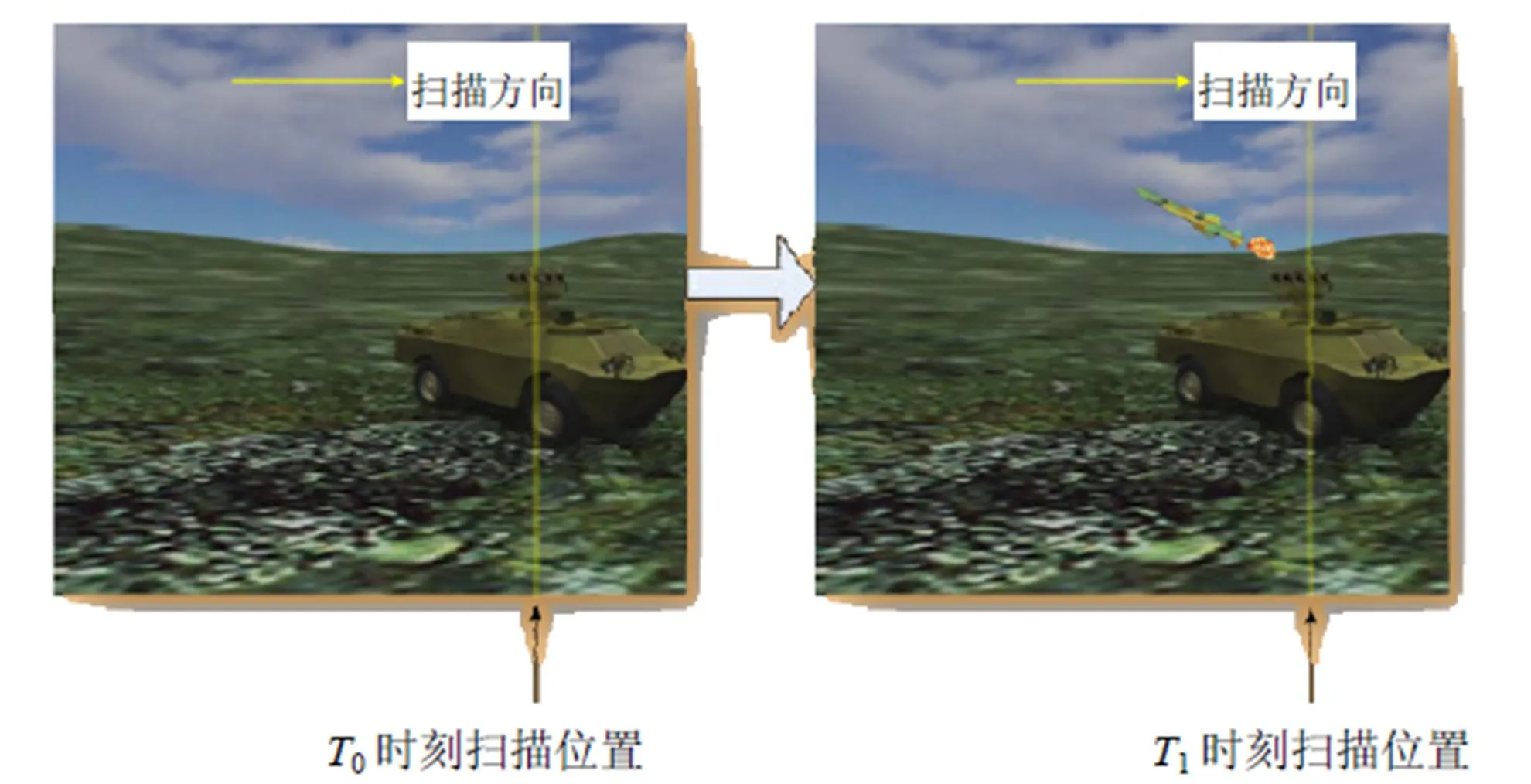
圖22 線掃描搜索跟蹤系統(tǒng)掃描響應(yīng)示意圖

圖23 步進(jìn)凝視搜索跟蹤系統(tǒng)掃描響應(yīng)示意圖
4)經(jīng)濟(jì)性的比較
線掃描方案的優(yōu)點(diǎn)是利用線列探測器天然的便于進(jìn)行橫向掃描的特點(diǎn)來進(jìn)行全景成像,對器件沒有面陣要求,降低了器件壓力,可以通過加大器件線列長度(如從早期的288發(fā)展成576、768甚至更大規(guī)格)來提高水平分辨率。用數(shù)千個(gè)探測元就能獲得畫質(zhì)很好的熱圖像。而要達(dá)到同樣的圖像質(zhì)量,凝視型FPA探測元的數(shù)量要增加2個(gè)數(shù)量級(jí)。
大面陣的凝視型FPA,技術(shù)上很難實(shí)現(xiàn),經(jīng)濟(jì)成本較高。FPA采用讀出電路后,為保證應(yīng)有的空間分辨率,探測元與讀出電路均采用直接注入方式,這就要求探測元有比較高的零偏阻抗,而對能帶在0.1eV的窄禁帶HgCdTe半導(dǎo)體,在技術(shù)上很難做到面積大、組份均勻而缺陷又少,因此,提高零偏阻抗、制備大規(guī)模的面陣很困難。當(dāng)探測器的尺寸達(dá)到一定程度時(shí),還要受HgCdTe、Si等半導(dǎo)體材料熱膨脹系數(shù)的限制,從材料到器件的工藝復(fù)雜度都是數(shù)量級(jí)的提高,從性價(jià)比的角度考慮,尤其在量大面廣的應(yīng)用中有一定局限性。
5)器件適應(yīng)性的比較
由于線掃描型搜索跟蹤系統(tǒng)將器件的積分時(shí)間約束到十幾ms的量級(jí),限制了該類型系統(tǒng)基本只能采用制冷長波線列紅外探測器(對于地面應(yīng)用,景物的長波輻射幾十倍于中波,因此可以支撐較短的積分時(shí)間),其中的特例像法國Thales公司早期研發(fā)的“天狼星”(SIRIUS)紅外搜索跟蹤系統(tǒng),采用長波和中波同時(shí)探測,但必須通過高達(dá)10級(jí)的TDI和小的F數(shù)(0.9)來保證足夠的能量。除了少量例子外,絕大多數(shù)線掃描型搜索跟蹤系統(tǒng)均采用長波制冷器件,而步進(jìn)凝視型系統(tǒng)由于積分時(shí)間的保證,可以在同一個(gè)架構(gòu)下采用不同的探測器(制冷長波、制冷中波、非制冷長波、可見光),系統(tǒng)可根據(jù)使用環(huán)境、目標(biāo)特性和指標(biāo)要求配置不同的器件(如濕熱環(huán)境下可考慮選擇中波器件,其它應(yīng)用選擇長波應(yīng)用),在器件的選擇上要更靈活。
綜上所述,采用這兩類FPA的搜索跟蹤系統(tǒng)各有優(yōu)劣,在較長時(shí)期內(nèi)還將并行發(fā)展,但凝視型器件構(gòu)成的系統(tǒng)是未來發(fā)展趨勢。
4 關(guān)鍵支撐技術(shù)
以上幾種應(yīng)用需要發(fā)展的關(guān)鍵支撐技術(shù)可歸納總結(jié)為以下幾種共用技術(shù)。
4.1 快速擺鏡控制技術(shù)
快速擺鏡在系統(tǒng)中完成功能為:在熱像單幀積分周期內(nèi)與方位機(jī)構(gòu)反向勻速運(yùn)動(dòng),補(bǔ)償實(shí)現(xiàn)熱圖在紅外探測器焦平面相對靜止;積分間隙期間則快速回掃,使凝視空間回到起點(diǎn),實(shí)現(xiàn)全景無縫拼接。機(jī)構(gòu)設(shè)計(jì)必須十分精巧,具有結(jié)構(gòu)緊湊、速度快、精度高、帶寬高、負(fù)載慣量大等特點(diǎn),控制算法復(fù)雜。
4.2 高精度穩(wěn)定平臺(tái)設(shè)計(jì)技術(shù)
穩(wěn)定平臺(tái)的主要功能是穩(wěn)定光學(xué)傳感器光軸,隔離車載振動(dòng)對光軸帶來的影響,穩(wěn)定平臺(tái)精度不高將直接影響成像質(zhì)量,從而影響對視頻圖像的有效判讀。高精度穩(wěn)定平臺(tái)研制技術(shù)主要可分解為以下幾方面的設(shè)計(jì)工作:
①高精度軸系結(jié)構(gòu)設(shè)計(jì)
作為雙軸雙框架的穩(wěn)定平臺(tái),要達(dá)到技術(shù)指標(biāo)所要求的穩(wěn)定精度和角位置精度,軸系部分的結(jié)構(gòu)設(shè)計(jì)至關(guān)重要。要同時(shí)考慮到精度、承載能力、熱穩(wěn)定性、體積、重量、加工工藝性和裝配工藝性等諸多因素。在實(shí)際的設(shè)計(jì)過程中需采用計(jì)算機(jī)三維造型來輔助設(shè)計(jì),并對關(guān)鍵的承載結(jié)構(gòu)進(jìn)行了強(qiáng)度分析。在加工和裝配過程中需解決大口徑薄壁軸承裝配、傳動(dòng)齒輪齒隙調(diào)整等技術(shù)難題。
②薄壁鑄件設(shè)計(jì)
穩(wěn)定平臺(tái)的結(jié)構(gòu)件中,中部殼體、前球殼、后球殼、俯仰框架等關(guān)鍵零件屬于薄壁鑄件,在制造工藝上有許多困難,容易出現(xiàn)縮孔、變形、裂紋等缺陷,極大的影響產(chǎn)品的強(qiáng)度和剛度,因此需要通過對材料、各種鑄造工藝的認(rèn)真分析和對零件設(shè)計(jì)的不斷修改和優(yōu)化,制定合理的制造工藝流程。
③高穩(wěn)定精度控制系統(tǒng)設(shè)計(jì)
控制系統(tǒng)是穩(wěn)定平臺(tái)實(shí)現(xiàn)各項(xiàng)功能和滿足性能指標(biāo)的核心部分。為了達(dá)到指標(biāo)要求的穩(wěn)定精度,需進(jìn)行細(xì)致地總體設(shè)計(jì),對于測量元件和執(zhí)行元件等關(guān)鍵部件指標(biāo)反復(fù)論證,擬采用全數(shù)字伺服控制技術(shù),在硬件上使用高速數(shù)字信號(hào)處理芯片來進(jìn)行計(jì)算,在控制算法上運(yùn)用經(jīng)典控制理論與非線性區(qū)處理相結(jié)合的手段以確保平臺(tái)的高穩(wěn)定精度控制。
4.3 全景掃描模式下的目標(biāo)跟蹤技術(shù)
不同于通常的視頻跟蹤應(yīng)用,當(dāng)紅外搜索跟蹤系統(tǒng)處于全景工作狀態(tài)時(shí),盡管熱像儀的工作幀頻通常還是50Hz,但系統(tǒng)的工作幀頻已降低到0.5~1Hz數(shù)量級(jí),因此除了需要在全景視頻中進(jìn)行空間的目標(biāo)匹配和跟蹤外,還需要在相對較低的系統(tǒng)幀頻下進(jìn)行時(shí)間域的跟蹤匹配,由于系統(tǒng)刷新時(shí)間較長(1~2s的回歸時(shí)間),目標(biāo)在幀與幀之間的形狀、位置甚至對比度都可能發(fā)生較大變化,因此在進(jìn)行相關(guān)匹配時(shí)必須研究軌跡外推、模板外推,運(yùn)用反射變換等多種算法解決視頻刷新慢所帶來的相關(guān)性降低的問題,提高跟蹤準(zhǔn)確率,降低誤識(shí)別概率。
4.4 全景成像顯示控制技術(shù)
由于所有的圖像、數(shù)據(jù)信息都需要在顯示控制組件上顯示,而與以往其它光電系統(tǒng)的工作性質(zhì)不同,全景成像系統(tǒng)可進(jìn)行準(zhǔn)實(shí)時(shí)的周邊態(tài)勢感知和目標(biāo)搜索,并且可通過操控界面改變系統(tǒng)的工作方式和全景顯示模式,因此全景成像顯控部分的技術(shù)表現(xiàn)將會(huì)直接影響到全景系統(tǒng)的性能發(fā)揮和使用效率,該部分技術(shù)主要研究內(nèi)容如下:
①全景圖像拼接
在全景工作模式下,由于從熱像儀送至顯控組件的視頻的每一幀都是不同角度的紅外圖像,需要在顯控端將這些圖片進(jìn)行緩存和全景顯示,因此需要將一組相互間存在一定重疊部分的圖像序列實(shí)施配準(zhǔn)、平滑從而形成一幅包含各圖像序列信息的全景視場的新圖像,另外還需要對全景圖像進(jìn)行畸變校正。
②多層次全景顯示及互操作人機(jī)工程研究
需要研究如何充分利用顯示界面高效動(dòng)態(tài)顯示各種不同層次的圖像信息以達(dá)到信息最大化的目的,同時(shí)需要從作戰(zhàn)使用的角度、人機(jī)工程的角度研究互操作的需求與實(shí)現(xiàn),盡量發(fā)揮全景系統(tǒng)的潛力和優(yōu)勢。
③軟硬件資源需求評估
在開發(fā)顯示控制組件的同時(shí),深入進(jìn)行軟硬件資源需求分析與評估,在型號(hào)階段與多功能顯控系統(tǒng)集成提出明確的資源需求(如顯示需求、計(jì)算需求、存儲(chǔ)需求、操控需求等)。
在此值得一提的是HGH公司開發(fā)的Cyclope全景圖像處理顯示控制軟件,如圖24[10]所示,軟件功能齊全,界面設(shè)計(jì)友好,合理排布了壓縮顯示全景圖、局部區(qū)域展寬顯示圖和360°環(huán)帶顯示、360°雷達(dá)顯示圖等,對感興趣區(qū)域可以展開全分辨顯示,還可以視需要顯示定位信息,自動(dòng)告警等等。

圖24 HGH公司開發(fā)的Cyclope全景圖像處理顯示控制軟件
4.5 傳感頭集成設(shè)計(jì)技術(shù)
由于在全景工作模式下,掃描穩(wěn)定平臺(tái)和熱像儀機(jī)內(nèi)的掃描擺鏡需要進(jìn)行同軸反向差速轉(zhuǎn)/擺動(dòng),因此在系統(tǒng)內(nèi)部布局時(shí)需優(yōu)先考慮熱像儀的安裝位置,這樣就給傳感頭內(nèi)部總體布局帶來很大的壓力,如果不能有效利用內(nèi)部空間包絡(luò),會(huì)導(dǎo)致傳感頭體積大、重量大,不光會(huì)增加控制負(fù)擔(dān),且會(huì)增大備彈面,因此需要充分考慮傳感頭內(nèi)部的集成設(shè)計(jì),對各零部件的質(zhì)量質(zhì)心進(jìn)行精確模擬,在布局上合理分配,做到既滿足空間尺寸要求,又達(dá)到各個(gè)軸向的最優(yōu)平衡,以減少裝調(diào)階段配平的工作量和配平重量;采用有限元分析軟件,對各關(guān)鍵零件進(jìn)行結(jié)構(gòu)分析,在滿足強(qiáng)度可靠性要求的前提下達(dá)到體積重量的最優(yōu)化;在電氣布局上,讓相關(guān)功能對應(yīng)的電路板、執(zhí)行元件、反饋元件、傳感器等盡量在空間布局上靠近,以減小相關(guān)連接電纜的長度,提高布局的簡潔性和可靠性;在電纜選擇和布局上,選取柔性電纜并進(jìn)行合理布局,以減少電纜對伺服穩(wěn)定控制的干擾,以利于伺服精度和穩(wěn)定精度的提高。
5 發(fā)展趨勢
光電設(shè)備與計(jì)算機(jī)處理和存儲(chǔ)技術(shù)的結(jié)合密不可分,信號(hào)和圖像誤差、信號(hào)識(shí)別和方位預(yù)測,信號(hào)傳輸與融合展示都越來越依賴計(jì)算機(jī)技術(shù)的進(jìn)步才能取得實(shí)質(zhì)上的突破;超分辨力、圖像融合、圖像去模糊,以及智能視頻分析等等,正在成為光電系統(tǒng)的關(guān)鍵技術(shù)。而隨著精確打擊的發(fā)展,對偵察圖像的清晰度、目標(biāo)定位精度的要求不斷提高,也對伺服穩(wěn)定控制技術(shù)和像移補(bǔ)償技術(shù)提出了新的要求[17]。
總的說來,紅外搜索跟蹤和全景態(tài)勢感知系統(tǒng)正在向全天候、全空域、多光譜、多模式、兼地空的綜合模式演進(jìn),其中紅外全景成像技術(shù)相應(yīng)的發(fā)展趨勢為:單波段到多波段、大面陣到超大面陣分辨、高幀頻到超高幀頻、更智能化等等,朝著發(fā)現(xiàn)距離更遠(yuǎn),看得更清晰,實(shí)時(shí)性更好方向不斷進(jìn)步。
[1] 楊百劍, 萬欣. 新一代機(jī)載紅外搜索跟蹤系統(tǒng)技術(shù)發(fā)展分析[J]. 激光與紅外, 2011, 41(9): 961-964.
YANG Baijian, WAN Xin. New generation of IRST technology in plane development[J]., 2011, 41(9): 961-964.
[2] 游蕾. 紅外搜索與跟蹤系統(tǒng)掃描地平線[J]. 外國海軍文集, 2005(5): 17-22.
YOU Lei. IRST scan horizon[J]., 2005(5):17-22.
[3] 丁立偉, 甘宇紅, 王宗俐, 等. 中波紅外和長波紅外探測系統(tǒng)性能的比較與選擇[J]. 紅外, 2014, 35(5): 1-6.
DING Liwei, GAN Yuhong, WANG Zongli, et al. Performance comparison and selection of mid-wave and long-wave infrared detection system[J]., 2014, 35(5): 1-6.
[4] 韓根甲. 艦載紅外搜索跟蹤系統(tǒng)的最新現(xiàn)狀與發(fā)展趨勢[J]. 現(xiàn)代防御技術(shù), 2007, 35(3): 109-114.
HAN Genjia. Present status and trend of shipyard IRST[J]., 2007, 35(3): 109-114.
[5] 陳兆兵, 郭勁, 苗用新, 等. 基于步進(jìn)凝視控制策略的告警系統(tǒng) [J]. 光電工程, 2008, 35(12): 9-12.
CHEN Zhaobing, GUO Jin, MIAO Yongxin, et al. Warning System Based on Step-stare Control[J]., 2008, 35(12): 9-12.
[6] 范宏波. 基于1152×6紅外長波線列探測器的高性能搜索預(yù)警系統(tǒng)[J],紅外技術(shù), 2010, 32(1):20-24.
FAN Hongbo. A High Performance IRST Based on 1152×6 LWIR Detectors[J]., 2010, 32(1): 20-24.
[7] IRSTs Search New Horizons[Z]. Jane S Navy Interna—tional April 2005.
[8] A. N. Belbachir, R. Pflugfelder, R. Gmeiner. A Neuromorphic Smart Camera for Real-time 360° Distortion-free Panoramas[C]//, 2010: 221-226.
[9] PO Nouguès, P Baize, F Roland,et al. Third-generation naval IRST using the step-and-stare architecture[C]//, 2008, 6940: 69401B.
[10] Vincent Leboucher, Gilles Aubry. High-resolution panoramic images with megapixel MWIR FPA[C]//, 2014, 9070: 90700F.
[11] G Barani, A Rossi, M Diani, et al. Development of a panoramic third generation IRST: initial study and experimental work[C]//, 2013, 8704: 87040J/
[12] Christophe Grollet, Yves Klein. ARTEMIS:Staring IRST for the FREMM frigate[C]//, 2007, 6542: 654233-11.
[13] KC Huang, PY Chien, CA Chien, et al. A 360-degree Panoramic Video System Design[J].2014,(VLSI-DAT). 2014: 1-4.
[14] HGH Infrared system. Spynel-M[EB/OL]. [2016-02-10]. http://www. hgh-infrared.com.cn.
[15] DAVID A. Fulghum. IR Sensors Cut From F-22 Appear on Joint Strike Fighter[J]., 2000, 153(11): 74-75.
[16] 蔡毅. 紅外系統(tǒng)中的掃描型和凝視型FPA[J]. 紅外技術(shù), 2001, 23(1):6-10.
CAI Yi. The Scanning and Starring FPA in Infrared Systems[J]., 2010, 32(1): 6-10.
[17] 劉忠領(lǐng), 于振紅, 李立仁, 等. 紅外搜索跟蹤系統(tǒng)的研究現(xiàn)狀與發(fā)展趨勢[J]. 現(xiàn)代防御技術(shù), 2014, 42(2): 95-101.
LIU Zhongling, YU Zhenhong, LI Liren, et al. Status and Development Trend of Infrared Search and Track System[J]., 2014, 42(2): 95-101.
Panoramic Imaging Technology Applied in IRST and Status Awareness System
CHEN Jie1,2,ZHANG Ruolan1,2
(1.,650223,; 2.650223,)
The paper proposes the advantage of infrared panoramic imaging technology applied in IRST and status awareness system,gives several main panoramic imaging schemes,and illustrates typical application examples. The characters and application areas of panoramic imaging schemes are analyzed and compared with. Key technologies of panoramic imaging are summarized and finally the developing trend is prospected.
panoramic imaging,IRST,status awareness,image stitching,step-and-stare
TN942
A
1001-8891(2016)04-0269-11
2016-02-10;
2016-03-12.
陳潔(1975-),女,研高工,主要研究方向?yàn)榧t外系統(tǒng)研發(fā)。
張若嵐(1972-),男,研高工,主要研究方向?yàn)楣怆娤到y(tǒng)。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
