基于DM6437的智能視頻監控系統設計與實現
2016-03-17 03:51:41李艾華
計算機應用與軟件 2016年2期
方 浩 李艾華 王 濤
(第二炮兵工程大學 陜西 西安 710025)
?
基于DM6437的智能視頻監控系統設計與實現
方浩*李艾華王濤
(第二炮兵工程大學陜西 西安 710025)
摘要針對陣地視頻監控系統智能化程度低的問題,提出一種基于DM6437的智能視頻監控系統解決方案。在圖像處理算法方面,將ViBe算法中采用第一幀圖像建模和基于隨機策略進行模型更新的思想用于改進傳統碼本算法的訓練和更新階段,提出一種基于隨機碼本的運動目標檢測算法以提高檢測效果。提出在Mean Shift跟蹤過程中采用Kalman濾波器預測目標位置,用于提高目標快速運動和遮擋等復雜情況下的跟蹤效果。在系統實現方面,基于DM6437芯片設計了集圖像采集與顯示、檢測與跟蹤、JPEG壓縮、網絡傳輸等多種功能于一體的智能視頻監控系統。模擬陣地環境下的實驗結果表明,該系統能夠準確地自動檢測和跟蹤目標,并且幀率可達6、7幀左右。
關鍵詞智能視頻監控DM6437ViBe碼本Kalman濾波器Mean Shift
DESIGN AND REALIZATION OF A DM6437-BASED INTELLIGENT VIDEO MONITORING SYSTEM
Fang Hao*Li AihuaWang Tao
(The Second Artillery Engineering University,Xi’an 710025,Shaanxi,China)
AbstractTo solve the problem of low intellectualisation degree in video monitoring system of positions,in this paper we put forward a DM6437-based solution of intelligent video monitoring system. In terms of image processing algorithm,we proposed a random codebook-based moving targets detection algorithm for improving the detection performance,it is achieved by applying the ideas of adopting the first frame for modelling and updating the model based on random strategy in ViBe algorithm to improving the training and updating stages of traditional codebook algorithm. And then we proposed to use Kalman filter to predict the target position in Mean shift tracking process,so as to improve tracking effects in complicated cases such as rapid target motion and occlusion. In terms of system realisation,we designed an intelligent video monitoring system based on DM6437 chip with various functions,such as video capture and display,targets detection and tracking,JPEG compression and network transmission,integrated. And the result of experiments in simulating the environment of positions showed that the system could detect and track targets automatically and accurately with a rate up to 6 or 7 frames.
KeywordsIntelligent video monitoringDM6437ViBeCode bookKalman filterMean shift
0引言
視頻監控是部隊信息化建設的重要方面。目前,陣地視頻監控子系統采用的是前端由各型攝像機進行視頻采集,經由同軸電纜進行數據傳輸,后端由綜合管理計算機和網絡存儲服務器進行綜合管理的模式。這種系統僅能實現24小時錄像監控功能,并且需要人員全天候值守,不僅極大地浪費人力物力,而且系統智能化程度不高,不利于陣地安全防范能力的提高。
針對上述問題,本文基于DM6437芯片設計了一套智能視頻監控系統。主要功能是實現對靜態場景中目標的自動檢測與跟蹤,為后續構建智能化陣地視頻監控系統打基礎。本文在充分分析ViBe[1]和碼本[2]兩種算法優缺點的基礎上,提出一種基于隨機碼本的運動目標檢測算法。該算法融合ViBe和碼本兩種算法的優點,將ViBe算法中采用第一幀圖像建模的思路用于改進傳統碼本算法的訓練階段,將ViBe算法中基于隨機策略進行模型更新的思想用于碼本更新階段。并通過實驗證明該算法兼具兩種算法的優點,不僅具有較小的計算量,而且檢測效果更好,對背景變化的適應能力更強。在目標跟蹤算法方面,Mean Shift[3]算法作為一種基于密度梯度的非參數估計方法,具有計算量小、實時性好、適用性強、能夠快速高效地實現目標跟蹤等優點,但由于沒有在跟蹤過程中利用目標的位置和速度等信息[4],導致存在環境干擾或者運動速度過快時容易跟蹤失敗。針對這種情況,本文提出采用Kalman濾波器進行目標位置預測,以提高傳統Mean Shift算法在目標快速運動和遮擋等情況下的跟蹤效果。最后基于DM6437開發了智能視頻監控系統,并在模擬陣地環境下取得了較好的檢測和跟蹤效果。
1基于隨機碼本的運動目標檢測算法
1.1算法基本原理
ViBe算法和碼本算法是兩種典型的非參數化運動目標檢測算法。ViBe[5]算法的特點是采用第一幀圖像中像素點的空間領域點建立背景模型和按一定概率隨機更新背景模型,這種方式計算量小,能夠快速開始目標檢測并對噪聲和亮度變化等具有一定的魯棒性[6,7],但也存在無法較好抑制“鬼影”等問題。碼本[8]算法通過長時間的碼本訓練來建立背景模型,然后基于亮度范圍和顏色相似度來進行像素點分類。該算法魯棒性強、計算效率高,建立的背景模型比較純凈[9],但無法較好地適應背景變化,而且在前景和背景像素分布類似的情況下容易造成碼字的更新錯誤[10]。本文融合兩種方法的優點,在改進碼本算法的基礎上提出一種基于隨機碼本的運動目標檢測方法。
在背景建模階段,隨機選取第一幀圖像中空間領域內像素點進行碼本訓練。該方法具有以下優點:1) 由于領域內像素點具有空間連續性,因而經過長時間碼本訓練,使得碼字的聚類均值將逐漸向領域內所有像素點的均值靠攏。這將逐漸淘汰出那些亮度、色度與其他點差異較大的像素點。2) 采用第一幀圖像進行碼本訓練,使得模型能夠從下一幀圖像立即開始進行前景檢測。當背景變換時,算法可以迅速丟掉原來的模型,立即建立新的碼本模型。
在背景更新階段,借鑒ViBe算法中隨機更新的思想進行碼本的實時更新。具體步驟如下:首先定義1到w之間的偽隨機序列M,從M中隨機選取的一個樣本Sample,定義背景像素點隨機更新的概率:
(1)
對于每一個分類為背景的像素點,在第一次選取的樣本Sample1=1時,更新對應碼本中的任意一個碼字。這樣可以保證模型中每一個像素點的壽命按指數形式衰減,使模型始終能夠實時更新,從而提高模型的動態適應能力。同時繼續從偽隨機序列中隨機選取第二個樣本Sample2,在Sample2=1情況下,從該背景點的領域內隨機選取一個像素點,并更新其碼本中的任一碼字,這樣可以實現背景像素點的傳播,保證像素點的空間連續性。反之則結束更新過程。具體流程如圖1所示。

圖1 碼本更新過程流程圖
1.2實驗結果對比
圖2為三種算法對PETS2001中的標準圖像序列Dataset2的檢測效果圖。可以看到,基于隨機碼本的檢測效果明顯好于其他兩種算法,抗干擾能力更強。同時,在實際實驗中還發現,改進算法的實時性明顯好于其他兩種。這是由于算法基于空間領域像素點建模,模型中碼字辨識度高,且數目較少、更新快。
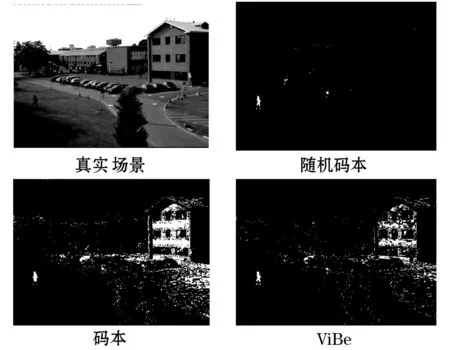
圖2 運動目標檢測效果圖
2結合Kalman和Mean shift的跟蹤算法
2.1算法基本原理
Meanshift跟蹤[11]的主要思路是沿著梯度增加的方向尋找與目標模型相似度最高的區域作為跟蹤結果。傳統的Mean shift算法采用顏色分布直方圖表征目標特征,具有對目標旋轉、變形及邊緣遮擋不敏感[12]的優點,但由于缺乏對目標位置的預測機制,使得在目標運動較快、被遮擋等情況不能有效跟蹤。Kalman濾波器是一種基于最小均方誤差對系統的狀態進行最優估計的算法[13],能夠以較小的計算量快速準確地估計目標的位置、速度等信息。因此本文中采用Kalman濾波器來預測運動目標的位置,算法的主要步驟如下:
(2)

Step 2根據Kalman濾波器預測當前幀中目標的位置,作為Mean Shift迭代的起點。假設Kalman濾波器的狀態模型和預測模型分別如下:
Xk=Ak,k-1Xk-1+Wk-1
(3)
Yk= HkXk+ Vk
(4)

(5)
(6)


(7)
(8)

(9)
Step 6運動目標實際位置判定。當相鄰幀中待選模型位置滿足下式:
|yi+1-yi|≤ε
(10)
則停止迭代,認為找到與目標模型足夠相似的待選區域,并將其作為運動目標在當前幀中的實際位置。否則返回Step 3。
Step 7校正Kalman濾波器。由于目標的位置不是收斂的而是按照一定軌跡變化的,因此在跟蹤完成后采用目標的最終位置對Kalman濾波器進行修正,使濾波器能夠及時跟上目標位置的變化。校正Kalman濾波器實際上也是更新Kalman濾波器狀態的過程。按照下列公式進行:
Pk=(I-KkHk)Pk,k-1
(11)
(12)
(13)
式中,Kk為Kalman器的增益矩陣,其他參數與Step 2中定義相同。
2.2實驗結果對比
結果如圖3所示,對快速運動的足球進行跟蹤實驗,左右兩側分別為傳統Mean Shift算法和改進算法的跟蹤效果對比圖。可以看到,隨著足球飛行速度的加快,采用傳統Mean Shift算法跟蹤誤差越來越大,而采用改進算法則能用跟蹤框較好地鎖定足球的位置。這主要是由于Kalman濾波器預測能夠準確地預測目標位置,從而提高了跟蹤效果。上述實驗結果也充分說明改進算法有助于提高對于快速運動目標的跟蹤效果。

圖3 快速運動目標跟蹤效果對比圖
3智能視頻監控系統的實現
3.1硬件平臺結構設計
整個平臺以DM6437為核心,如圖4所示。主要包括視頻采集模塊、輸出顯示模塊、通信模塊、存儲模塊、時鐘模塊和電源模塊六部分。視頻采集模塊的主要作用是接受普通攝像機采集的視頻信號并進行必要的預處理。輸出顯示模塊的主要作用是輸出驅動顯示器顯示實時采集的圖像。通信模塊包括RS485、JTAG、Ethernet三類接口,分別用于控制云臺轉動、下載程序和系統調試、網絡通信等。存儲模塊包括DDR2、NOR FLASH、EEPROM三類存儲器,分別用于緩存實時圖像數據、存儲DSP程序代碼、存儲系統核心參數,如IP地址、MAC地址、網關地址等。時鐘模塊可以為整個DSP系統提供必要的時間信息。電源模塊為板上所有模塊提供不同等級的穩定電壓。
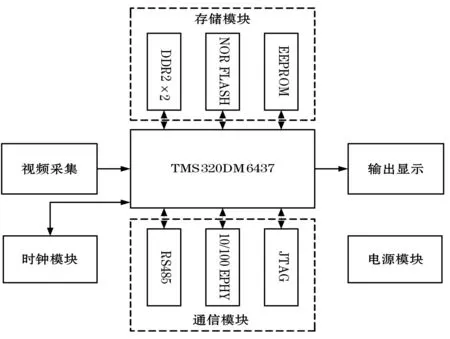
圖4 系統結構圖
3.2核心程序設計
本文所設計的智能視頻監控系統集圖像采集與顯示、運動目標檢測和跟蹤、JPEG壓縮編碼和網絡傳輸等多種功能于一體。為實現上述功能,系統在實時操作內核DSP/BIOS的基礎之上,創建了對應的圖像采集與顯示、智能視頻分析、編碼壓縮、網絡傳輸(包含網絡發送和參數設置兩類)等線程,同時充分利用郵箱等機制實現線程之間的調度與數據共享結合。在實際設計過程中,結合TI提供的相關軟件,可以很方便地采用PSP庫(用于開發視頻采集與顯示驅動)、JPEG軟件編碼器和NDK網絡套件分別實現上述相關功能。因此,整個程序設計的重點在于運動目標檢測與跟蹤算法的移植。
在檢測階段,首先對于每一幀圖像進行灰度化處理以提取亮度信息,然后采用均值金字塔進行圖像分解以降低待處理圖像分辨率。其次,進行運動目標檢測,得到前景區域。然后結合形體學濾波進行噪點處理,運用兩次掃描法提取目標特征。同時,考慮到剛進入場景時目標檢測的完整性,在連續5幀均檢測到目標時提取第5幀圖像目標特征并開啟跟蹤過程。
在跟蹤階段,根據檢測結果特征建立目標模型,并采用Kalman濾波器預測目標位置,隨后將該位置作為起始位置進行Mean Shift跟蹤,在跟蹤結束后計算預測位置與實際位置的幾何距離。如果該距離小于一定閾值ε,表明跟蹤有效,并利用目標的實際位置校正Kalman濾波器,反之則結束跟蹤過程。具體的檢測和跟蹤流程如圖5所示。

圖5 檢測和跟蹤流程圖
4實驗結果及分析
開發簡易的PC端播放軟件,用于實時查看DSP端的檢測和跟蹤效果。并在室內室外兩種情況下模擬陣地典型環境進行實驗,結果如圖6所示。可以看到,上位機播放軟件畫面清晰,無明顯失真,并且在室內室外兩種場景下都能夠以較高的精度檢測運動目標,實現準確有效地跟蹤。同時經測定,系統幀率達到6、7幀左右,能在一定程度上滿足實時性要求。

圖6 系統檢測和跟蹤效果圖
5結語
本文旨在開發嵌入式智能視頻監控系統以提升陣地視頻監控系統的智能化程度。該系統中主要有兩點創新:
1) 提出了一種基于隨機碼本的運動目標檢測算法,提高了在不同場景下的檢測效果和實時性,使得算法比較適合在嵌入式系統中使用;
2) 融入Kalman濾波器預測改進了傳統的Mean Shift跟蹤算法,提高了系統在不同場景下的跟蹤效果。
同時基于DM6437芯片實現了整個系統的開發。目前,該系統在室內和室外兩種典型的模擬陣地環境下都取得了不錯的檢測和跟蹤效果,且幀率可達6、7幀,具備一定的實用價值。
參考文獻
[1] Olivier Barnich,Marc Van Droogenbroeck. ViBe: A universal background subtraction algorithm for video sequences[J]. IEEE Transactions on Image Processing,2011,20 (6):1709-1724.
[2] Kim K,Chalidabhongse T H,Harwood D,et al. Real-time foreground-background segmentation using codebook model[J]. Real-time imaging,2005,11(3): 172-185.
[3] Comaniciu D,V Ramesh,P Meer. Kernel-based object tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2003,25(2): 564-577.
[4] 常發亮,劉雪,王華杰. 基于均值漂移的卡爾曼濾波器的目標跟蹤算法[J].計算機工程與應用,2007,43(12):50-52.
[5] Olivier Barnich,Marc Van Droogenbroeck. VIBE: A Powerful Randon Technique to Eatimate the Backround in Video Sequences[C]//International Conference on Acoustics,Speech,and Signal Processing,2009:945-948.
[6] 蔣建國,王濤,齊美彬,等. 基于ViBe的車流量統計算法[J].電子測量與儀器學報,2012,26(6):558-563.
[7] 余燁,曹明偉,岳峰. EVibe: 一種改進的Vibe運動目標檢測算法[J].儀器儀表學報,2014,35(4): 924-931.
[8] 代科學,李國輝.一種基于碼本的監控視頻運動目標檢測算法[J].計算機工程,2007,33(14):27-29.
[9] 郭春生,王盼.一種基于碼本模型的運動目標檢測算法[J].中國圖象圖形學報,2010,15(7): 1079-1083.
[10] 姜柯,李艾華,蘇延召.基于改進碼本模型的視頻運動目標檢測算法[J].電子科技大學學報,2012,41(6):932-936.
[11] 朱勝利,朱善安,李旭超,等.快速運動目標的Mean Shift跟蹤算法[J].光電工程,2006,33(5):66-70.
[12] 劉璞,王春平,徐艷.基于Mean Shift重要性采樣的粒子濾波跟蹤算法[J].計算機工程與設計,2014,35(3):909-914.
[13] 楊紅霞,杭亦文,劉旭.基于Meanshift與kalman濾波器的視頻目標跟蹤算法[J].武漢理工大學學報:信息與管理工程版,2012,34(2):147-151.
中圖分類號TP391
文獻標識碼A
DOI:10.3969/j.issn.1000-386x.2016.02.046
收稿日期:2014-09-04。方浩,碩士生,主研領域:計算機視覺,智能儀器與系統。李艾華,教授。王濤,副教授。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
