基于KBE的串聯機器人智能分析系統初探
2016-03-18 01:04:50PreliminarystudyonintelligentanalysissystemforserialmanipulatorbasedonKBE
制造業自動化 2016年1期
Preliminary study on intelligent analysis system for serial manipulator based on KBE
孫 宙,王君英,楊向東,陳 懇
SUN Zhou, WANG Jun-ying, YANG Xiang-dong, CHEN Ken
(清華大學 機械工程系,北京 100084)
?
基于KBE的串聯機器人智能分析系統初探
Preliminary study on intelligent analysis system for serial manipulator based on KBE
孫宙,王君英,楊向東,陳懇
SUN Zhou, WANG Jun-ying, YANG Xiang-dong, CHEN Ken
(清華大學 機械工程系,北京 100084)
摘 要:知識工程(KBE)是研究產品全生命周期中工程知識的技術和方法論,通過知識的獲取、表示和推理等過程來實現產品設計過程的自動化。以串聯機器人為例,探究基于KBE的智能分析系統,并在CAD平臺PRO/E中進行了系統搭建。該系統引導工程師在產品設計過程中補充和完善設計知識,輔助工程師對裝配體中的零件進行自動受力分析。介紹了系統基于用戶交互和幾何信息再提取的知識獲取途徑,以分析類CProAnalysis為例說明了知識表示方法,給出了系統中運動學方程的知識推理實現過程。該系統能減輕工程師的工作量,降低產品結構分析的難度,從而縮短產品的開發周期。
關鍵詞:知識獲取;知識表示;知識推理;智能分析系統
0 引言
計算機輔助設計系統(CAD系統)具有強大的數值計算能力和圖形繪制能力[1],極大的便利了工程師的設計工作,在現代機械設計領域已經得到了廣泛應用。然而,對于國內大部分工程師,當前的CAD系統僅僅是繪圖和建模工具,主要用于輔助設計產品幾何外形,而較少涉獵到產品設計過程中的物理特性分析。
工程師使用CAD軟件進行設計,在準確表示幾何信息的同時,往往忽略了大量的設計信息,例如在設計過程中,螺栓的預緊力、摩擦系數,電機的最大轉速、最大轉矩等是工程師重點關注的參數,而在CAD系統中螺栓和電機都是由點、線、面構成的零件(part)文件,保留了幾何結構參數,卻丟失了預緊力等設計參數。區別于零件的幾何參數,我們將預緊力等參數定義為設計知識。由于這些設計知識的丟失,在完成設計工作進行校核分析時,大部分工程師需要重新添加設計知識,為得到準確的分析結果增加了難度,同時這一過程也十分依賴工程師的經驗和能力。
為降低工程師的分析難度、減少重復勞動量,提高產品設計分析的效率,項目引入了知識工程的概念。機械設計手冊已經規范了大部分零部件(常用件、標準件等)的校核分析流程,工程師進行分析時需要進行大量的重復勞動,其工作負擔大大增加。
知識工程(Knowledge-Based Engineering,KBE)的概念是斯坦福大學計算機科學家B. A. Feigenbaum教授在第五屆國際人工智能會議上提出的。時至今日,知識工程仍然沒有明確而固定的定義,但知識工程涵蓋的內涵基本一致。文獻[2]中按照時間順序羅列了知識工程在不同環境下的不同的定義,總體歸納起來,知識工程是涵蓋了計算機輔助設計(CAD)、人工智能(AI)等技術在內的,研究產品全生命周期中工程知識的技術和方法論。KBE通過對設計知識的獲取、分析、推理和重用等過程來實現產品設計中重復工作的自動化,從而能夠有效減少產品設計階段的時間和經濟成本。
知識工程(KBE)中,通常包含5個活動,分別是知識獲取、知識驗證、知識表示、知識推理和知識闡述,而知識獲取、知識表示和知識推理則是其中的關鍵。
知識獲取,是將設計知識轉化為可用的知識庫的過程,該過程為設計提供支持,是知識工程的基礎和前提。在機械設計領域,知識主要來源于標準規范和機械設計手冊等書籍、專家的設計經驗和對成熟產品中知識的再挖掘等三個方面。知識表示則是知識獲取的延續,這一過程將已經獲取的設計知識以一定的形式有效的組織起來,即將設計知識在計算機系統中進行組織,方便設計知識的存儲、讀取、查詢和使用。
知識推理,是知識的應用和知識的再生過程,是知識工程的核心和難點。這一過程將已有的設計知識按照規則進行合理的推理演繹,得到相應的結果反饋給用戶或者作為新的知識存儲在知識庫中。知識推理主要有四種形式,分別是規則推理(RBR),案例推理(CBR),演繹推理和歸納推理[3]。其中規則推理通過系統設定的規則來實現,案例推理則通過成熟產品等模板來實現。
知識工程KBE和CAD技術相比較,CAD技術側重于建立幾何模型并實現動態顯示,而KBE技術更加關注設計過程中,對于設計知識的綜合分析和應用。從整個項目的角度考慮(如圖1[4]所示),單純使用CAD技術時,項目耗時的80%用于常規性設計,僅有20%的時間進行創新設計,而采用KBE技術能夠將常規性設計的時間成本最小化,為創新型設計提供充裕的時間,同時還能更好地控制項目整體的耗時和成本。

圖1 項目中CAD與KBE比較[4]
目前基于KBE的應用主要集中在幾何建模方向,文獻[5]中提出了高等CAD模板(HLCt)概念,該方法同樣基于KBE,從幾何層面力求實現飛行器等設計過程的自動化;文獻[6]中則詳細介紹了在Pro/E中快速添加標準件的方法;他們都是從幾何尺寸中關鍵參數的角度,對符合國標或者行業標準的零件(螺釘、銷、鍵、軸承等)進行快速建模,減少大量的重復工作。
本文提出了基于KBE的串聯機器人智能分析系統,主要從設計知識的角度進行研究與應用,利用設計知識輔助設計過程中的物理計算,降低產品設計的難度,縮短產品設計周期。系統在CAD平臺Pro/E的基礎上進行搭建,實現了輔助工程師完成關鍵零件的自動化受力分析的功能,為下游有限元分析等提供必要、準確的前處理數據。
1 系統中的知識獲取
本文研究的串聯機器人智能分析平臺需要的設計知識可以分為兩類:通用知識和案例知識。對于前者,例如各類型零件受力分析規則、運動學方程計算方法等,系統直接將這類通用知識程序化,方便系統在不同案例中進行使用。對于案例知識,該串聯機器人智能分析系統主要采用如下兩種方式:用戶交互和幾何數據重用。
1.1 用戶交互
使用圖形用戶界面和工程師進行交互,來獲取知識,是最直接的案例知識獲取方式。該系統在后臺預存了不同功能類型的零件屬性,供用戶選擇后添加,部分零件的屬性如表1所示。

表1 各類零件的屬性
用戶在進行零件裝配時,點擊“添加組件”按鈕后彈出如圖2所示對話框,在按照提示設置零件屬性值后,再選擇需添加的具體零件,定義約束并完成裝配。

圖2 用戶定義屬性值界面
1.2 幾何數據重用
幾何數據重用,即充分利用產品模型中的幾何信息,將其按照特定的規則以一定的形式進行再組織,形成可被系統使用的新有效知識。裝配信息的再利用就是一個典型案例。
對于CAD系統,機械產品的裝配就是不斷將零件或組件(子裝配體)添加到組件中,并定義約束完成裝配的過程。這一過程中著重考慮的是兩個相關零部件之間的關系,而很少考慮零件和整體之間的關系。下圖,顯示的就是Pro/E中焊接機器人的裝配樹。

圖3 串聯機器人裝配樹
而對于上圖中的焊接機器人(屬于該系統研究的對象,串聯機器人),機器人學已經建立了完善的“關節-連桿”模型,即從基座開始,經過一系列的關節和連桿連接,最后作用在執行端的近似線性串聯系統。基于該模型,可以十分方便的建立其運動學方程及動力學方程。該系統通過對零件約束關系的識別,以非剛性約束為分界點[7],準確地將圖中的無序裝配樹構建出如圖所示的各連桿信息,可以看到基座、滑軌和絲杠零件都被劃分為連桿0,這和焊接機器人實際情況保持一致。此外,系統還充分利用機器人裝配樹新定義了零件負載模型,用以記錄串聯機器人中零件之間的先后順序。
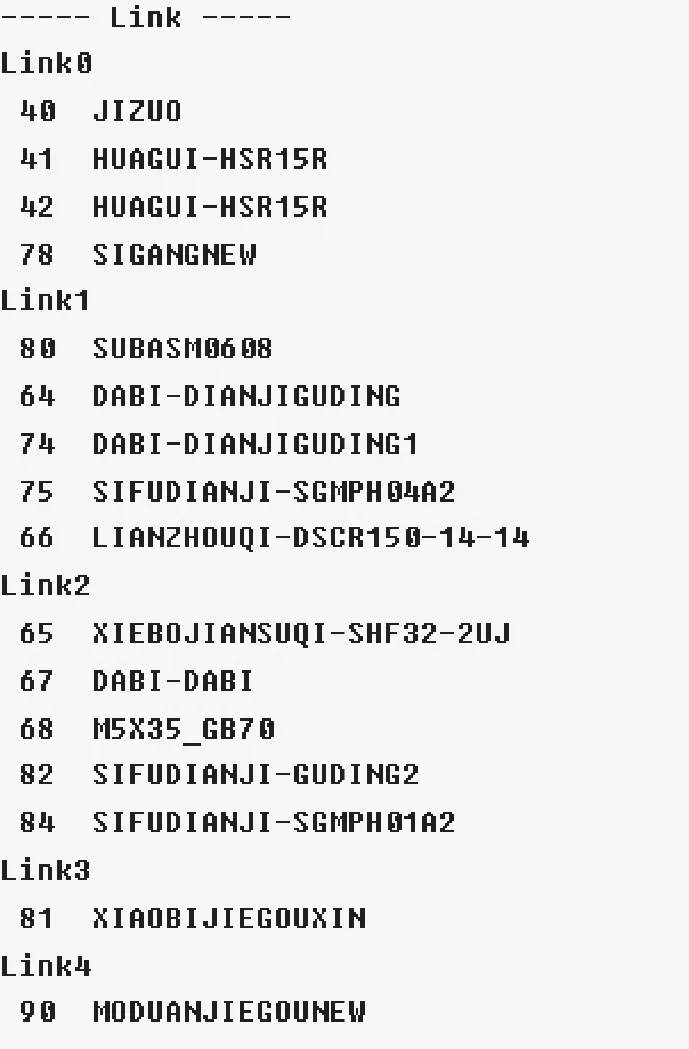
圖4 連桿模型
此外,我們新定義關鍵約束(key constraint)概念,將原有模型中的幾何約束信息轉化為分析知識。零件進行裝配時,通常定義1個約束集,約束集中包含若干個約束。如圖5所示,高亮零件通過mate-insert-insert三個約束構成的約束集鎖定位置,其中mate類型表示了兩個零件實際接觸的表面,而兩個insert類型則起到輔助定位的作用。我們就將約束集中和實際零件接觸面對應的約束定義為關鍵約束,并且要求工程師設置約束集時,始終首先定義關鍵約束。

圖5 關鍵約束定義
2 系統中的知識表示
對于已經獲取的知識,我們需要在系統中將其有效的組織,方便存儲、訪問和使用。此處以用于受力分析的設計知識的組織結構為例進行說明。
該串聯機器人智能分析系統定義了分析類CProAnalysis,其UML圖如圖6所示。
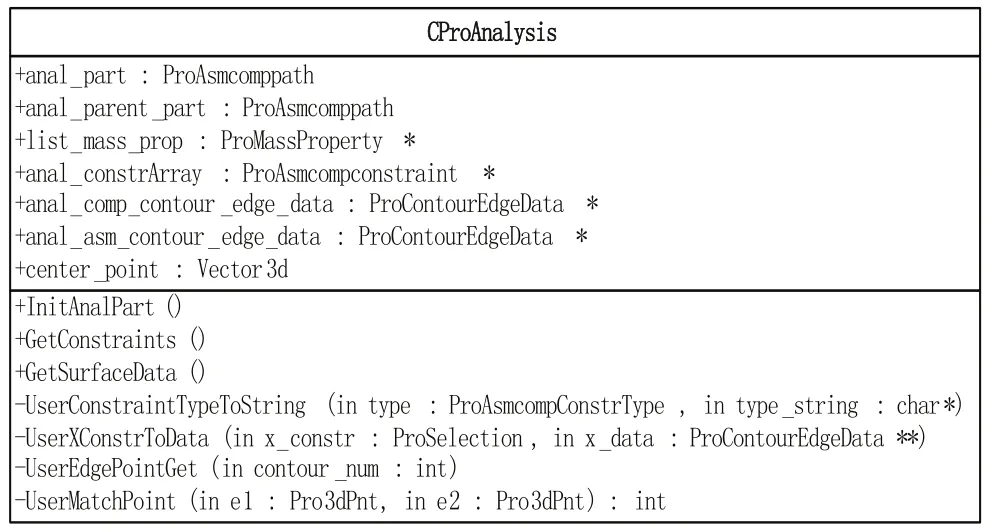
圖6 CProAnalysis分析類UML圖
其中,anal_part用于記錄用戶指定的待分析零件在裝配體中的路徑,anal_part是該分析類的主關鍵字(用來唯一標示分析對象)。屬性anal_parent_part則記錄分析零件的父零件路徑。屬性list_mass_prop通過鏈表的形式,完整記錄待分析零件負載的所有零件的質量信息,質量信息包括質量、質心坐標、慣性張量等。同時,為了更加便利地訪問約束(減少遍歷次數),此處用anal_constrArray記錄下該零件的裝配約束集。屬性anal_comp_contour_edge_data和anal_asm_contour_edge_data則分別記錄組件和裝配件的接觸面的輪廓和邊界數據,該數據包含了零件接觸面的輪廓信息,以及該輪廓所有邊界構成的鏈表,通過該數據可以十分方便的獲得接觸面的數學模型。center_point則記錄該接觸面的面心,方便后續的受力分析環節。
以圖7為例,若用戶指定圖中固定板為待分析零件,則CProAnalysis分析類中記錄的信息有:父零件連接塊,圖中固定板右側所有零件的質量信息(即固定板所有負載的質量信息),固定板和連接塊之間的約束集(如圖5所示),固定板接觸面輪廓和輪廓中所有的邊界(共9個)和連接塊接觸面輪廓和輪廓中所有的邊界(共17個)。以上這些知識為固定板的受力分析提供了必要的支持。

圖7 分析類CProAnalysis實例
3 系統中的知識推理
知識推理是整個設計系統的重點和難點,它體現在系統的各個方面。知識推理是對已有知識的充分應用,同時由知識推理得到的結果也可以作為新的設計知識繼續運用在后續的推理中。此處簡要介紹零件的運動學方程的推理過程。
圖4中已經給出了零件所屬連桿的信息,同時在已獲取的知識“關節-連桿”中還能得到如圖8所示的關節軸線信息。圖8中每一軸線Axis均有3個屬性:其中的Type代表軸線類型,Type屬性值為1表示轉動關節,屬性值為2表示移動關節;Point是軸線上點的世界坐標;Vector表示軸線的方向向量;這3個屬性值完全確定關節。
依據機器人學的D-H參數法建模,以世界坐標系作為連桿0(基座)的坐標系,依次獲得相鄰連桿之間的D-H參數,并按照如下公式計算相鄰連桿之間的變換矩陣。


圖8 關節軸線信息
連桿n上的零件的變換矩陣為:

對于任意零件,將其自身坐標系轉化為世界坐標系下表示,再乘以其所屬連桿的變換矩陣即可得到該零件的運動學方程。
4 串聯機器人智能分析系統
該串聯機器人智能分析系統搭建在常用的CAD軟件Pro/E當中,這一方面大大減輕了開發人員在幾何計算和圖形顯示上耗費的精力,開發人員可以將工作重心放在自動化受力分析上;另一方面工程師使用熟悉的界面和操作,回避了重新學習軟件的過程。工程師完成了串聯機器人的初步設計后,該智能分析系統輔助其完成零部件的受力分析,這一結果可以使得后續的零件強度剛度校核更為準確。
該串聯機器人智能分析系統以知識工程為基礎,完成設計知識的獲取、驗證、表示、推理和闡述等多個過程,實現對串聯機器人中任一零件進行自動化受力分析的功能。該智能分析系統的流程圖如圖9所示。
用戶首先按照預先定義的規則進行模型和知識的輸入,完成輸入后系統自動完成模型知識的獲取和表示。此時,用戶可以進入動力學模塊,用戶提供電機的運動參數,可以得到模型中任一零件的運動學和動力學方程,同時可以為零件受力模塊提供慣性力知識。若進入受力分析模塊,用戶首先選擇待分析的零件和零件所屬類型。此后,系統依次顯示零件的前后負載關系和接觸面信息,由用戶交互修改并最終確認。用戶明確接觸關系后,進入受力分析計算,得到對應結果進行顯示和輸出。圖10就是系統對串聯機器人中一固定板完成的受力分析最終結果。
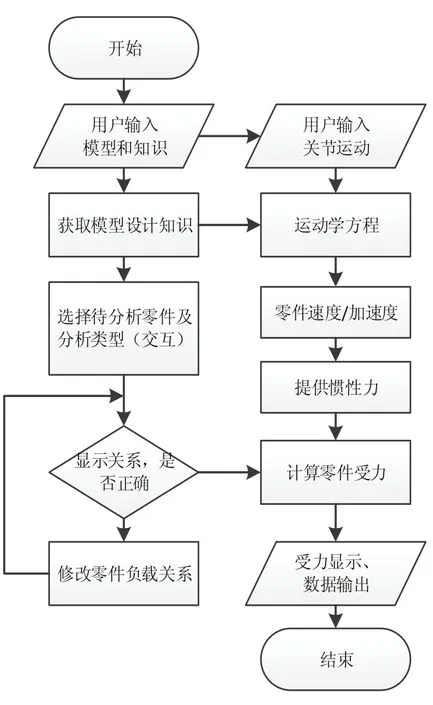
圖9 智能分析系統流程圖
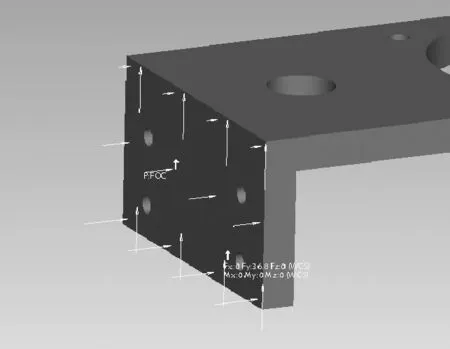
圖10 零件受力分析結果
5 結束語
本文提出了基于KBE的串聯機器人智能分析原型系統,初步實現了其系統功能。系統以工程師的設計知識為基礎,一方面通過交互界面由工程師補充設計知識,另一方面按照一定規則充分挖掘和利用已有的設計知識,再對知識進行合理的表示和演繹推理,得到目標結果。系統旨在實現對設計產品中任一零件進行自動化受力分析的功能,為進一步的結構校核提供更確切的邊界條件,這從很大程度上降低了對工程師進行產品設計的能力需求,適應了當前市場對于設計分析一體化的要求,縮短了產品設計開發周期。
目前,該串聯機器人智能分析系統提供標準件和懸臂梁等典型零件的自動化受力分析模塊,后續會進一步研究一般零部件的受力情況分析方法,不斷拓展并完善系統。
參考文獻:
[1] 肖人彬,周濟,查建中.智能設計——先進設計技術的核心[J].機械設計,1997,4:3-5.
[2] Verhagen W J C,Bermell-Garcia P, van Dijk R E C, et al. A critical review of Knowledge-Based Engineering: An identifi cation of research challenges[J].Advanced Engineering Informatics, 2012,26(1):5-15.
[3] 鄧小龍.船舶智能總布置設計若干關鍵技術研究[D].上海交通大學,2012.
[4] Skarka W.Application of MOKA methodology in generative model creation using CATIA[J].Engineering Applications of Artifi cial Intelligence,2007,20(5):677-690.
[5] Amadori K,Tarkian M, ?lvander J, et al. Flexible and robust CAD models for design automation[J].Advanced Engineering Informatics,2012,26(2):180-195.
[6] 卜慶珍,姜雄飛,張瑞亮,等.Pro/E二次開發在機械標準件設計中的應用[J].煤礦機械,2014,1:089.
[7] 鄭登科,楊向東,孫宙,等.基于Pro/E的串聯機器人仿真平臺設計[J].制造業自動化,2014,36(14):137-141.
作者簡介:孫宙(1991 -),男,江蘇丹陽人,碩士研究生,研究方向為數字化設計與制造。
收稿日期:2015-10-16
中圖分類號:TP391,TH122
文獻標識碼:A
文章編號:1009-0134(2016)01-0128-05
