風送式水稻側深精準施肥裝置的設計與試驗
2016-03-21 12:40:41左興健武廣偉付衛強李立偉魏學禮趙春江西北農林科技大學機械與電子工程學院楊凌712100國家農業智能裝備工程技術研究中心北京100097農業部農業信息技術重點實驗室北京100097農業智能裝備技術北京市重點實驗室北京100097
農業工程學報 2016年3期
關鍵詞:設計
左興健,武廣偉,付衛強,李立偉,魏學禮,趙春江(1. 西北農林科技大學機械與電子工程學院,楊凌 712100; 2. 國家農業智能裝備工程技術研究中心,北京 100097;3. 農業部農業信息技術重點實驗室,北京 100097; 4. 農業智能裝備技術北京市重點實驗室,北京 100097)
?
風送式水稻側深精準施肥裝置的設計與試驗
左興健1,2,3,4,武廣偉2,3,4,付衛強2,3,4,李立偉2,3,4,魏學禮2,3,4,趙春江1,3※
(1. 西北農林科技大學機械與電子工程學院,楊凌 712100;2. 國家農業智能裝備工程技術研究中心,北京 100097;3. 農業部農業信息技術重點實驗室,北京 100097;4. 農業智能裝備技術北京市重點實驗室,北京 100097)
摘要:針對中國水稻施肥機械化程度低,傳統撒施肥料利用率低、施肥量大的現狀,結合側深施肥農藝特點,對風送式排肥方法進行了理論分析,研制了風送式水稻側深精準施肥裝置。該裝置采用模塊化設計與乘坐式插秧機配套使用,采用電機驅動排肥、風送肥料、全球定位系統(global position system,GPS)測速的工作原理,側位深施化肥的施肥方式,采用車輛行駛速度與排肥驅動電機轉速實時匹配的精準施肥控制方法。設備在黑龍江七星農場開展了田間實際作業試驗。試驗表明,該裝置與插秧機配合使用時能一次性完成插秧與側深精準施肥作業,當預置施肥量為300 kg/hm2,車輛穩定行駛速度為1 m/s時,施肥量偏差控制在5.82%以內,能夠較好的滿足實際生產需求。該研究為開展水稻變量施肥控制技術研究和水稻側深施肥裝置的研發提供了參考。
關鍵詞:農業機械;設計;農作物;風送式;精準施肥;側深施肥
左興健,武廣偉,付衛強,李立偉,魏學禮,趙春江. 風送式水稻側深精準施肥裝置的設計與試驗[J]. 農業工程學報,2016,32(3):14-21.doi:10.11975/j.issn.1002-6819.2016.03.003http://www.tcsae.org
Zuo Xingjian, Wu Guangwei, Fu Weiqiang, Li Liwei, Wei Xueli, Zhao Chunjiang. Design and experiment on air-blast rice side deep precision fertilization device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(3): 14-21. (in Chinese with English abstract)doi:10.11975/j.issn.1002-6819.2016.03.003 http://www.tcsae.org
Email:zuo_xj@163.com
0 引 言
水稻是中國最主要的糧食作物,是種植面積最大、單產最高、總產量最多的糧食作物。施肥是水稻生產過程中一個重要作業環節,目前中國水稻生產過程中施肥環節一直沿用人工手撒施肥方式,施肥量大,且肥料在田間分布不均,秧苗吸肥量不一致,直接影響水稻產量[1]。水稻側深施肥是在水稻機械插秧的同時將顆粒肥料(基肥和蘗肥)一次性施于秧苗側位具有一定深度土壤中的施肥方式,肥料呈條帶狀施于耕層,距水稻根系近,利于根系吸收利用,提高肥料利用率[2-6]。
在國外,日本久保田、井關、洋馬等公司在水稻側深施肥設備方面進行了大量的研究工作,研發了安裝有側深施肥裝置的水稻插秧機系列化產品,側深施肥裝置采用機械式傳動方式,安裝復雜,與中國現有插秧機配套性差,阻礙了側深施肥技術的應用[7-8],國內水稻機械施肥環節主要利用水田拖拉機懸掛圓盤式撒肥機進行拋撒施肥以及利用旋耕施肥一體機在旋耕的同時將肥料施在碎土層,施肥量大,肥料分布不均勻。在已開展水稻側深施肥裝置的研究方面,缺乏風送式輸送肥料方面的理論研究,還沒有實現對電機排肥的精確控制,無法實現精準施肥作業[9-14]。在已開展的精準施肥技術及控制系統研究方面,主要是針對旱田作業環境開展基于處方圖的精準施肥技術裝備研究,已有的基于處方圖的變量施肥控制方法不能滿足插秧機水田環境下側深精準施肥的要求[15-19]。
本文結合水稻側深施肥農藝特點,開展了風送排肥理論和水田側深精準施肥控制方法的研究。針對乘坐式插秧機設計了風送式水稻側深精準施肥裝置,采用電機驅動排肥、風送肥料的原理,通過全球定位系統(global position system,GPS)數據計算得到車體行駛速度,根據車速變化實時調整施肥量,以期實現水田環境中的側深精準施肥作業,提高施肥均勻性和肥料利用率。
1 施肥裝置結構及工作原理
1.1施肥裝置結構
該裝置采用模塊化整體式設計,包括一體化安裝底座、測速模塊、施肥控制器、車載控制終端、作業狀態傳感器、排肥驅動電機、肥箱、排肥器、鼓風機、風管、排肥管、排肥口,底座通過螺栓或其他連接緊固件固定在插秧機踏板上,該裝置能與不同品牌、不同型號插秧機配套使用。該裝置與插秧機配套使用結構簡圖如圖1所示,主要技術參數如表1所示。
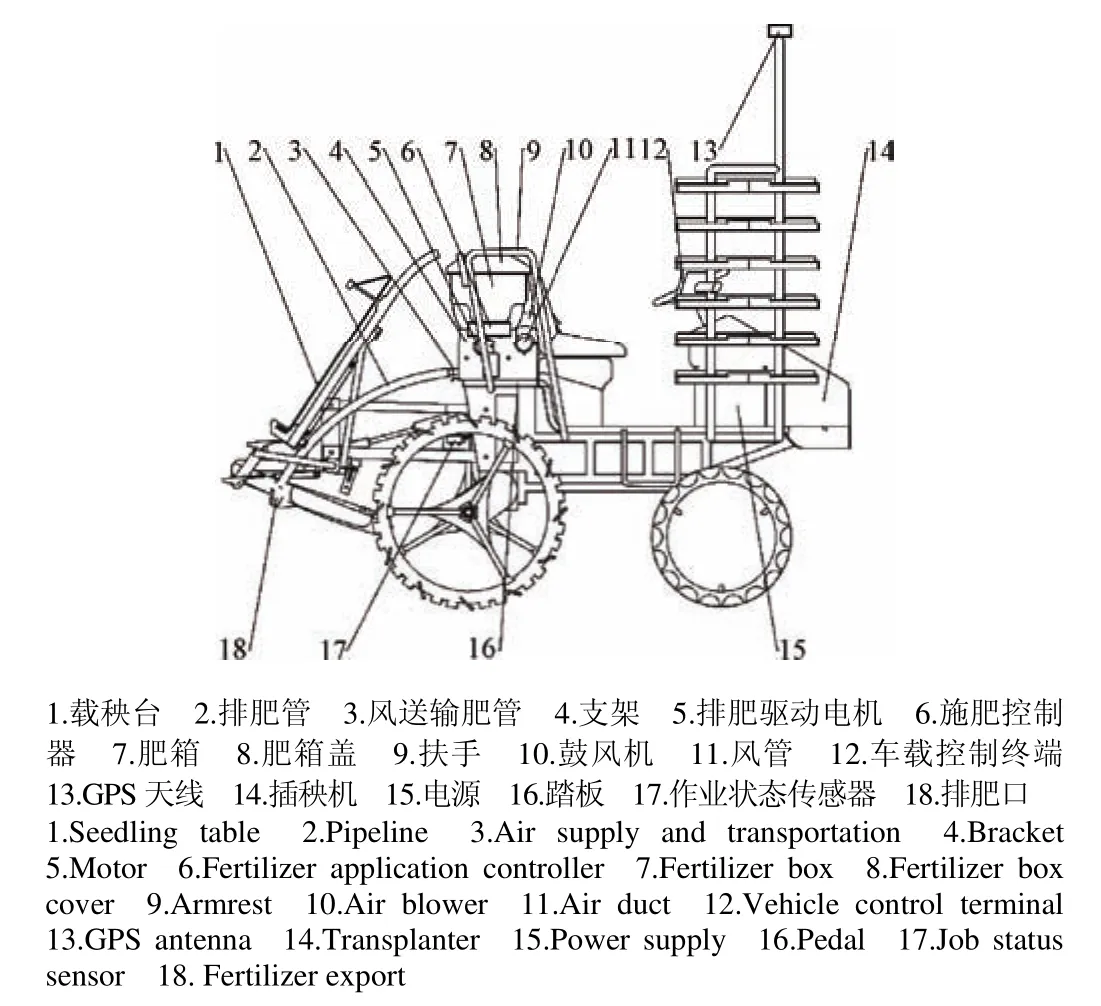
圖1 施肥裝置與插秧機配套使用結構簡圖Fig.1 Supporting use of fertilizing device and transplanting machine structural diagram
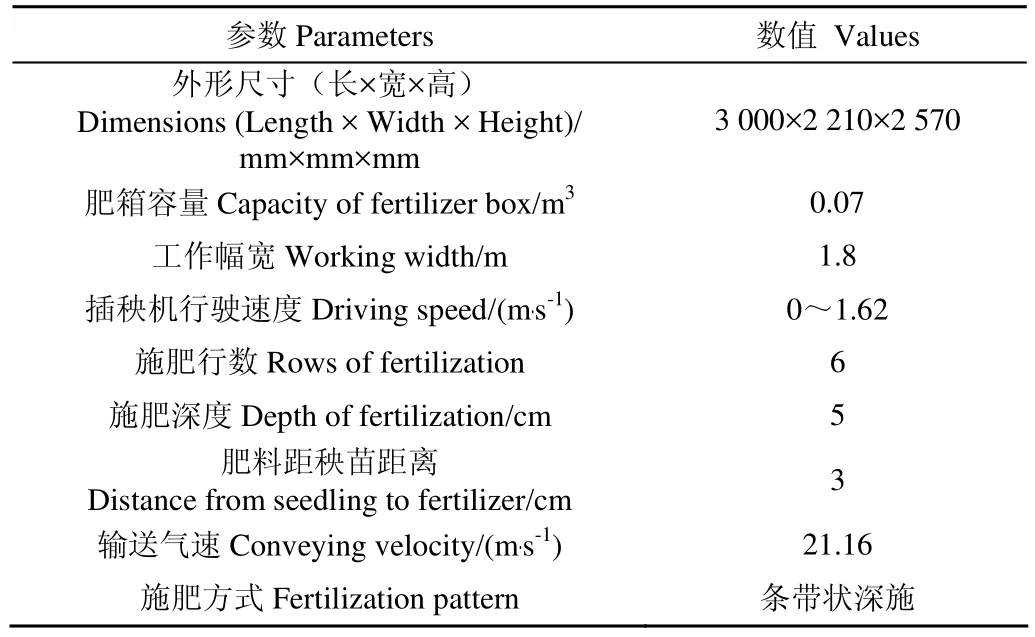
表1 風送式水稻側深精準施肥裝置主要技術參數Table 1 Main technical parameters of rice side deep precision fertilization device based on wind feed type
1.2一體化安裝底座及肥箱結構
為簡化安裝方式,提高施肥裝置的通用性,底座與肥箱采用一體化結構設計。肥箱采用輕質透明塑料肥箱,肥箱底部橫截面為頂大底小的倒梯形狀,肥箱通過支架安裝在底座上,底座一端固定風機,一端支架固定排肥驅動電機及施肥控制器。一體化安裝底座及肥箱如圖2所示。
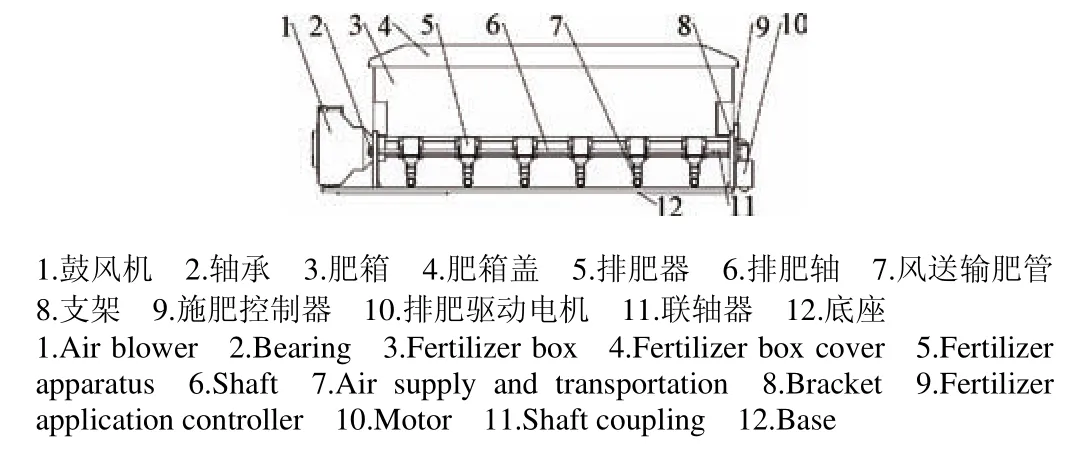
圖2 一體化安裝底座及肥箱結構示意圖Fig.2 Structure of integrated installation base and fertilizer box
1.3工作原理
施肥裝置采用電機驅動排肥、風送肥料的工作原理。施肥作業時,車載控制終端設定目標施肥量,排肥驅動電機帶動排肥輪轉動進行排肥,鼓風機強制氣吹輸送肥料。施肥深度及肥料距秧苗之間的距離通過排肥口與滑動板之間的距離來進行調整。采用車輛行駛速度與排肥驅動電機轉速實時匹配的施肥控制方法,利用GPS數據計算得到插秧機行進速度,采用作業狀態傳感器感知插秧機工作狀態,根據插秧機作業速度,實時控制施肥量。田間作業時,排肥口在秧苗側邊3 cm處劃出一道深5 cm的矩形溝槽,排肥器排出的肥料在風力和重力的作用下,經風送輸肥管、排肥管、排肥口,下落至已劃溝槽的底部,最后,在覆土板作用下將肥料覆蓋于溝槽中[10-14]。施肥原理圖如圖3所示。

圖3 施肥原理圖Fig.3 Fertilization principle diagram
2 排肥覆土部件設計
2.1排肥口設計
排肥口通過螺栓固定于插秧機滑動板上。作業過程中滑動板底部的根茬、雜草在通過排肥口時被楔形塊壓入泥漿或隨泥漿分流到排肥口兩側,兩側泥漿無法快速彌合劃出的矩形溝槽,為排肥口肥料的排出創造了條件。楔形塊按照船形鏟式開溝器原理進行設計,迎面切角為35°,排肥口底部與滑動板之間的距離為5 cm,排肥口中心與秧爪之間的距離為3 cm,從而保證定位施肥。排肥口安裝位置及結構如圖4所示。

圖4 排肥口結構示意圖Fig.4 Structure of fertilizer outlet
2.2覆土裝置
覆土裝置如圖5所示,包括滑動板,板式覆土板。覆土板通過預留孔安裝在滑動板上,覆土板設置在左右排肥口的正后方,兩覆土板呈V形結構,板長不超過100 mm,過長刮傷秧苗,過短覆土能力差。兩覆土板板間夾角為120°,夾角過小覆土能力差,夾角過大易壅土堵塞,覆土板與地面夾角為60°。
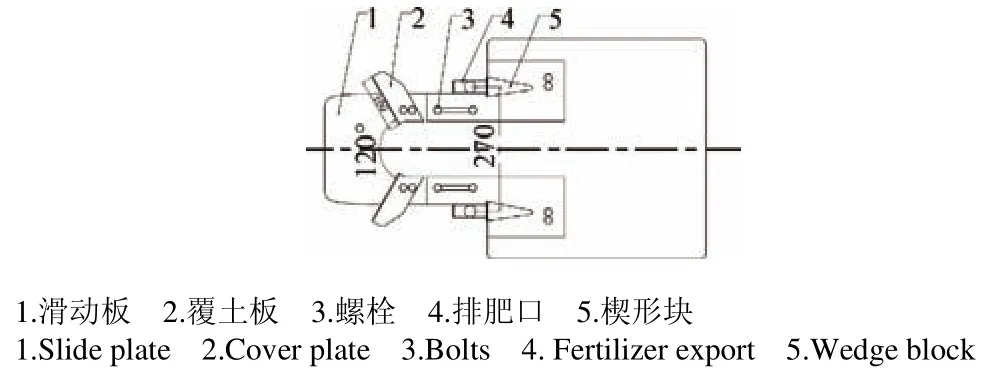
圖5 覆土裝置結構示意圖Fig.5 Structure of trenching and casing soil
3 氣力輸送系統
3.1氣力輸送系統結構及工作原理
風送式水稻側深精準施肥裝置是側深施肥技術應用的載體,氣力輸送系統是實現水田環境中穩定排肥的關鍵。水田施肥,排肥管路長且曲折,傳統的憑重力排肥效果不佳,水和泥漿會影響肥料從排肥管排出,有時會倒灌進排肥管阻礙肥料正常排出,造成堵塞。本裝置采用開放式氣力輸送肥料的方法[20-21]。
本施肥裝置氣力輸送系統氣源壓力低于0.1 MPa,采用正壓壓送式氣力輸送系統[20-21]。系統主要由鼓風機、風速調節開關、風管、風送輸肥管、排肥器、料斗、排肥管組成。圖6為氣力輸送系統簡圖,氣源設在系統前端,系統工作時,肥料經排肥器下落至風送輸肥管,鼓風機將具有一定壓力的壓縮氣體通入風送輸肥管,在文丘里效應的作用下,風送輸肥管進料口呈負壓,氣流沿進氣口通向出氣口,與被輸送的顆粒肥料混合,顆粒肥料在輸送管中以流動的氣體為載體,經排肥管、排肥口在氣流和重力的雙重作用下落入下肥口劃出的位于已插秧苗側位具有一定深度的矩形溝槽內[22-24]。

圖6 氣力輸送系統Fig.6 Pneumatic conveying system
3.2氣力輸送系統主要參數
3.2.1空氣流量
為保證顆粒肥料在輸肥管路中順利輸送而不被堵塞,顆粒肥料和空氣要保持適當的混合濃度比,本輸送系統屬于低壓系統,生產率較小,混合濃度比取0.6[20],空氣流量為

式中Q為空氣流量,m3/s;W為輸送機構生產率,t/h;γ為空氣容重,γ=1.2 kg/m3;μ為混合濃度比。
插秧機作業效率為0.2~0.61 hm2/h,按最大作業效率0.61 hm2/h、施肥量300 kg/hm2計算,可知輸送機構生產率W為0.183 t/h,經計算,空氣流量Q為250 m3/h。
3.2.2輸送氣速
輸送氣速是評價系統輸送性能的重要指標,此速度必須保證顆粒肥料能在輸肥管中正常運輸。因輸肥管有高低起伏,速度過低容易造成管道堵塞,速度過高不但浪費能量,還會增加肥料對管道的磨損,同時加劇顆粒肥料的破損,降低肥料緩釋效應[21,25]。由于輸送氣速為

式中V*為輸送氣速,m/s;VL為肥料懸浮速度,m/s;k為速度系數(一般為1.5~2.5,與物料濃度,管道復雜性有關。)
本研究通過懸浮試驗,實測得到懸浮速度為10.58m/s,由于水稻側深施肥所用緩釋復合肥料體積、密度大,風送管道長,速度系數k等于2為宜[20-21],輸送氣速V*為21.16 m/s。
本文同時在靜止條件下,當排肥口處于水及泥漿環境中,進行了排肥試驗。本對水及泥漿沒過排肥口1、2、3、4、5 cm進行了排肥試驗,并用太倉華裕控制設備有限公生產的基于熱膜風速原理的風速傳感器測定了水及泥漿不堵塞排肥口的臨界風速。試驗數據如圖7所示。試驗表明輸送氣速能滿足排肥要求。
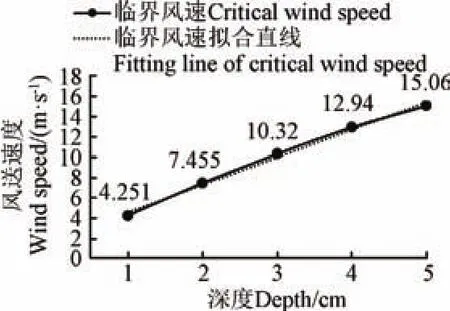
圖7 臨界風速圖Fig.7 Critical wind speed chart
3.2.3風送輸肥管結構設計
為實現風送系統肥料進口無空氣泄漏,設計了如圖8所示風送輸肥管,該管由進料口、入口圓筒段、圓錐收縮段、圓筒形喉部、圓錐擴散段、出口圓筒段組成。鼓風機排出的氣流通過入口圓筒段,以很高的速度經過圓筒形喉部,該高速氣流通過圓筒形喉部時在文丘里效應的作用下在進料口形成負壓,從而使進料口無氣體外泄[26]。
輸肥管路內徑由空氣消耗量和輸送氣速共同決定,內徑為式中d1為輸肥管內徑,m。

計算可得輸肥管內徑d1為26.5 mm,由于與風送輸肥管對接的標準鋼絲骨架塑料軟管內徑為25、32 mm,本設備選用接近理論直徑的內徑為25 mm的鋼絲骨架塑料軟管,適當減小輸肥管內徑有助于提高風速,降低堵塞。根據經典文丘里管設計方法對風送輸肥管進行設計,收縮角為21°,當擴散角為8°時,圓錐擴散段壓差最小[27-28],當節流比為0.7時收縮段壓差較小,所以喉部直徑為d2= 17.5 mm,喉段長度常為0.5 d2或者d2,為保證肥料入口空間,該管喉部長度為d2=17.5 mm[27-28]。
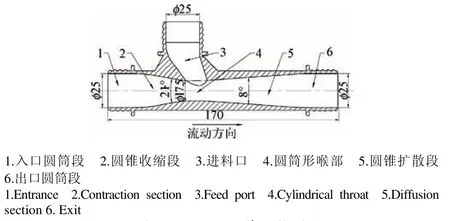
圖8 風送輸肥管結構圖Fig.8 Structure of fertilizer delivery tube
3.2.4風機選型
根據流量及氣速要求,本設備選用工作電壓為12 V、功率為72 W的可調速離心風機,機芯由德國ebmpapst公司生產,額定轉速為3 200 r/min,型號為R1G190-AC11-52。
4 施肥控制系統設計
4.1風送式水田側深施肥控制系統總體設計
風送式水田側深施肥控制系統是基于實時車速的精準施肥作業控制[29-30],系統包括具有GPS接收模塊的車載控制終端,施肥控制器、作業狀態傳感器、排肥驅動電機、鼓風機等,系統結構如圖9a所示。
施肥控制系統使用排肥軸目標轉速訊息、實際排肥軸轉速訊息和車速訊息等將車載控制終端和施肥控制器聯系起來[30-31]。排肥軸目標轉速訊息是車載控制終端發送給施肥控制器的目標轉速訊息;實際排肥軸轉速訊息是施肥控制器反饋給車載控制終端的當前施肥量表征值;車速訊息是車載控制終端通過GPS接收器接收到的數據計算所得的當前車速,車速訊息通過總線發送給施肥控制器。車載控制終端與施肥控制器通過RS485總線通信,按照串行鏈路上MODBUS協議的定義,采用RTU傳輸模式。作業過程中,車載控制終端通過解析GPS數據計算車體行駛速度,計算排肥驅動電機目標轉速,實現電機轉速的實時控制。施肥作業控制流程如圖9b所示。
4.2車載控制終端
車載控制終端是Windows XP操作系統,針對水田側深精準施肥作業需求,利用eMbeddedVisualC++集成開發環境,在該終端的操作系統上設計了施肥控制軟件,車載控制終端與施肥控制器采用RS485串行總線通訊模式。該軟件通過調用終端中集成的高精度GPS模塊,解析接收到的GPS數據,通過計算,獲取車體行駛速度。軟件界面能實時顯示電機轉速、作業狀態傳感器狀態值信息,同時該軟件允許用戶根據實際作業需求設定工作參數。軟件界面如圖9c所示。

圖9 施肥控制系統框圖Fig.9 Control system block diagram
4.3施肥控制器
施肥控制器主要任務是采集當前排肥驅動電機轉速并將數據上報給車載控制終端,接收車載控制終端發送的電機目標轉速,并驅動電機達到目標轉速。施肥控制器采用型號為AQMD2410NS的直流有刷電機驅動器,設置為自測速閉環控制,電機轉速用驅動器內部集成的PID調節方式實現穩速,其中比例系數Kp值為0.2,積分時間常數Ti值為0.15,微分時間常數Td值為0.15,采樣節拍周期Td為1 ms。
本施肥裝置共6行,插秧機幅寬為1.8 m,肥盒每轉排肥量為20 g,目標施肥量、機具行駛速度、排肥驅動電機轉速之間具有如下關系

式中n1為排肥驅動電機轉速,r/min;t為時間,s;S為作業面積,hm2;l為機具行駛路程,m;v為行駛速度,m/s;G為目標施肥量,kg/hm2。
5 機具性能試驗與分析
參照GB/T 20346.1-2006《施肥機械試驗方法》第1部分全幅寬施肥機及NY/T 1003-2006《施肥機械質量評價技術規范》對風送式水稻側深精準施肥裝置進行了臺架及田間試驗。
5.1臺架試驗
在北京市昌平區小湯山國家精準農業示范基地對電機在不同轉速下對各行排肥量一致性進行測定。試驗時,肥料容積超過肥箱容積的二分之一,測定行數為6行,由于水田側深施肥量小,寒地水稻側深施肥量在300 kg/hm2左右[2-3],正常穩定施肥作業時,排肥驅動電機轉速為20~30 r/min,本試驗所設置排肥驅動電機轉速分別為10、20、30、40 r/min,測定時間為5 min,每個排肥器在每個轉速下重復試驗5次,試驗完成后,將6個排肥口的肥料分別收集編號,用精度為0.001 g的電子天平進行稱量并記錄。將20組試驗結果進行匯總統計,統計結果如表2所示,并按式(5)計算各行排量一致性的標準差和變異系數。
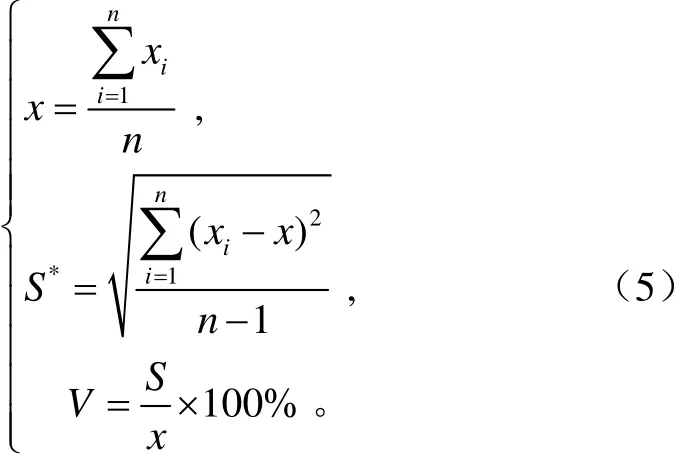
式中xi為每行各次平均排肥量,g;x為每行各次平均排量的平均值,g;S*為各行排量一致性的標準差,g;V為各行排量一致性的變異系數,%;n為測定行數(排肥口個數)。在式(5)中,當n<30時,分母取(n-1),當n≥30時,分母取n。
從表2中可以看出,相同轉速下,各行之間排肥量變異系數小,一致性好,排肥量比較恒定,隨著轉速的提高平均排肥量基本呈線性增加,不同轉速下,肥盒每轉排肥量比較穩定,隨轉速的提高,每轉排肥量有減小的趨勢。

表2 各行排肥量一致性測定統計結果Table 2 Statistical results of each row fertilizer quantity consistency determination
5.2田間試驗
5.2.1試驗設計
為檢驗設備的實際作業性能,2015年5月中旬在黑龍江七星農場建三江北大荒精準農業農機中心試驗田進行試驗,并對施肥裝置進行了施肥均勻性試驗,施肥總面積為6 666.7 m2,試驗所用肥料為云南天化國際化工有限公司生產的復合肥料,所用車載平臺為洋馬VP6乘坐式水稻插秧機。田間試驗如圖10所示。

圖10 插秧機與施肥裝置配合使用進行田間試驗Fig.10 Field experiment of using rice transplanter and fertilizing device
試驗時將施肥區域分為10個46.3 m×14.4 m的小施肥區,在長度方向上每隔14.4 m(8倍幅寬)樹立一個標記桿,每個小施肥區可進行4次往復施肥作業。
5.2.2施肥均勻性測定
施肥試驗時,插秧機穩定行駛速度為1 m/s,預置施肥量為300 kg/hm2,插秧機在施肥小區域往復施肥4次進行1次肥料稱質量并計算當前施肥區施肥量,統計結果如表3所示,并按式(6)進行施肥量偏差計算。

式中γs為施肥量偏差,%;Wq為試驗前肥箱內化肥質量,kg;Wh為試驗后肥箱內剩余的化肥質量,kg;S為施肥作業面積,m2;F為預置施肥量,kg/hm2。
從表3可以看到,施肥裝置施肥量總體比較穩定,當預置施肥量為300 kg/hm2時,車輛行駛速度為1 m/s時,施肥量偏差控制在5.82%以內。
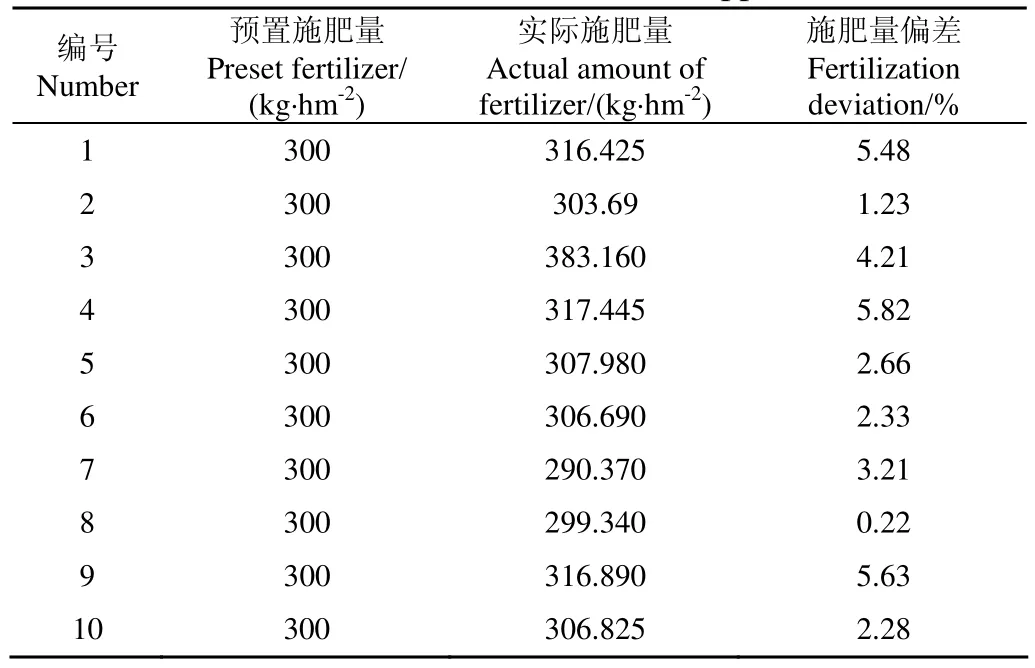
表3 田間施肥統計結果Table 3 Statistical results of field application
6 結 論
1)針對寒地水稻側深施肥生產需要,設計了風送式水稻側深精準施肥裝置,并開發了一套適合該裝置的精準施肥作業控制系統。該裝置與插秧機配套使用時,在設定目標施肥量的情況下,能夠根據插秧機行駛速度實時調整施肥量,能實現連續帶狀側深精準施肥作業,提高施肥均勻性和肥料利用率。
2)田間作業試驗表明,施肥裝置能穩定完成施肥作業,當車體行進速度為1 m/s,預置施肥量為300 kg/hm2時,目標施肥量與實際施肥量相對誤差控制在5.82%以內,施肥作業精度達到了設計目標。下一步需要進行更多的田間試驗,進一步測試系統的穩定性和可靠性。
[參考文獻]
[1] 曾希柏,李菊梅. 中國不同地區化肥施用及其對糧食生產的影響[J]. 中國農業科學,2004,37(3):387-392. Zeng Xibai, Li Jumei. Fertilizer application and its effect on grain production in different counties of China[J]. Scientia Agricultura Sinica, 2004, 37(3): 387-392. (in Chinese with English abstract)
[2] 夏艷濤,吳亞晶. 寒地水稻側深施肥技術研究[J]. 北方水稻,2014(1):30-32. Xia Yantao, Wu Yajing. Study on side deep fertilizing of rice in cold area[J]. North Rice, 2014(1): 30-32. (in Chinese with English abstract)
[3] 白雪,鄭桂萍,王宏宇,等. 寒地水稻側深施肥效果的研究[J]. 黑龍江農業科學,2014(6):40-43. Bai Xue, Zheng Guiping, Wang Hongyu, et al. Research on the effect of side and deep fertilizing for rice in cold reign[J]. Heilongjiang Agricultural Sciences, 2014(6): 40-43. (in Chinese with English abstract)
[4] Miyoko W,Tomoko Y,Kazuyoshi S, et al. Distribution of anammox bacteria in a free-water-surface constructed wetland with wild rice (Zizania latifolia)[J]. Ecological Engineering, 2015, 81: 165-172.
[5] Sheng Z,Sho S,Shohei R, et al. Effect of infiltration rate on nitrogen dynamics in paddy soil after high-load nitrogen application containing 15N tracer[J]. Ecological Engineering, 2011, 37(5): 685-692.
[6] Kaoru A,Yasuo O. Wastewater treatment by using kenaf in paddy soil and effect of dissolved oxygen concentration on efficiency[J]. Ecological Engineering, 2007, 29(2): 125-132.
[7] 中村奈,中川善清,清水孝式. 施肥機[P]. 中國專利:103583126, 2014-02-19.
[8] 大前健介,椿本彰史. 施肥裝置[P]. 中國專利:103858576,2014-06-18.
[9] 位國建,薦世春,姜偉,等. 1GF-200旋耕施肥機的設計與試驗[J]. 農機化研究,2014(9):190-192. Wei Guojian, Jian Shichun, Jiang Wei, et al. Design and experiment of 1GF-200 rotary tiller with fertilizing[J]. Journal of Agricultural Mechanization Research, 2014(9): 190-192. (in Chinese with English abstract)
[10] 位國建,薦世春,付乾坤,等. 水稻插秧施肥聯合作業機的設計[J]. 農機化研究,2015(11):104-107,112. Wei Guojian, Jian Shichun, Fu Qiankun, et al. The design of rotary transplanting with fertilizing combine machine[J]. Journal of Agricultural Mechanization Research, 2015(11): 104-107, 112. (in Chinese with English abstract)
[11] 朱松,張瑞宏,張劍峰,等. 水田旋耕施肥復式作業機設計與試驗[J]. 農機化研究,2015(7):147-150. Zhu Song, Zhang Ruihong, Zhang Jianfeng, et al. Design and test of teamwork machine rototilling and fertilizing in paddy field[J]. Journal of Agricultural Mechanization Research, 2015(7): 147-150. (in Chinese with English abstract)
[12] 陳長海,許春林,畢春輝,等. 水稻插秧機側深施肥技術及裝置的研究[J]. 黑龍江八一農墾大學學報,2012,24(6):10-12,25. Chen Changhai, Xu Chunlin, Bi Chunhui, et al. Researching of rice transplanter deep side fertilizing technology and device[J]. Journal of Heilongjiang Bayi Agricultural University, 2012, 24(6): 10-12, 25. (in Chinese with English abstract)
[13] 陳雄飛,羅錫文,王在滿,等. 水稻穴播同步側位深施肥技術試驗研究[J]. 農業工程學報,2014,30(16):1-7. Chen Xiongfei, Luo Xiwen, Wang Zaiman, et al. Experiment of synchronous side deep fertilizing technique with rice hill-drop drilling[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(16): 1-7. (in Chinese with English abstract)
[14] 曾山,湯海濤,羅錫文,等. 同步開溝起壟施肥水稻精量旱穴直播機設計與試驗[J]. 農業工程學報,2012,28(20):12-19. Zeng Shan, Tang Haitao, Luo Xiwen, et al. Design and experiment of precision rice hill-drop drilling machine for dry land with synchronous fertilizing[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(20): 12-19. (in Chinese with English abstract)
[15] 趙軍,于潔,王熙,等. 機械驅動式精密變量施肥播種機的研制[J]. 黑龍江八一農墾大學學報,2006,18(2):49-52. Zhao Jun, Yu Jie, Wang Xi, et al. Research on a combined seed and fertilizer drill of precision variable rate control drived by engine[J]. Journal of Heilongjiang August First Land Reclamation University, 2006, 18(2): 49-52. (in Chinese with English abstract)
[16] 張書慧,馬成林,杜巧玲,等. 精確農業自動變量施肥機控制系統設計與實現[J]. 農業工程學報,2004,20(1):113-116. Zhang Shuhui, Ma Chenglin, Du Qiaoling, et al. Design of control system of variable rate f ertilizer applicator in precision agriculture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2004, 20(1): 113-116. (in Chinese with English abstract)
[17] 張書慧,馬成林,吳才聰,等. 一種精確農業自動變量施肥技術及其實施[J]. 農業工程學報,2003,19(1):129-131. Zhang Shuhui, Ma Chenglin, Wu Caicong, et al. Development and application of a variable rate f ertilizer applicator for precision agriculture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2003, 19(1): 129-131. (in Chinese with English abstract)
[18] 王秀,趙春江,孟志軍,等. 精準變量施肥機的研制與試驗[J]. 農業工程學報,2004,20(5):114-117. Wang Xiu, Zhao Chunjiang, Meng Zhijun, et al. Design and experiment of variable rate fertilizer applicator[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2004, 20(5): 114-117. (in Chinese with English abstract)
[19] 耿向宇,李彥明,苗玉彬,等. 基于GPRS的變量施肥機系統研究[J]. 農業工程學報,2007,23(11):164-167. Geng Xiangyu, Li Yanming, Miao Yubin, et al. Development of variable rate fertilizer applicator based on GPRS[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2007, 23(11): 164-167. (in Chinese with English abstract)
[20] 王太柱. 氣流輸送裝置設計計算[J]. 農業機械,2008(22):64-65. Wang Taizhu. Design and calculation of air transport device[J]. Chinese Agricutural Mechanization, Agricultural Machinery, 2008(22): 64-65. (in Chinese with English abstract)
[21] 王太柱. 氣流輸送機構的參數確定[J]. 中國農機化,2008(4):74-78. Wang Taizhu. The confirming of the argument on air flow transportation mechanism[J]. Chinese Agricutural Mechanization, 2008(4): 74-78. (in Chinese with English abstract)
[22] 李加念,洪添勝,馮瑞玨,等. 基于脈寬調制的文丘里變量施肥裝置設計與試驗[J]. 農業工程學報,2012,28(8):105-110. Li Jianian, Hong Tiansheng, Feng Ruijue, et al. Design and experiment of venturi variable fertilizer apparatus based on pulse width modulation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(8): 105-110. (in Chinese with English abstract)
[23] 王淼,黃興法,李光永. 文丘里施肥器性能數值模擬研究[J].農業工程學報,2006,22(7):27-31. Wang Miao, Huang Xingfa, Li Guangyong. Numerical simulation of characteristics of venturi injector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2006, 22(7): 27-31. ( in Chinese with English abstract )
[24] 韓啟彪,黃興法,劉洪祿,等. 6種文丘里施肥器吸肥性能比較分析[J]. 農業機械學報,2013,44(4):113-117,136. Han Qibiao, Huang Xingfa, Liu Honglu, et al. Comparative analysis on fertilization performance of six venturi injectors[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(4): 113-117, 136. (in Chinese with English abstract)
[25] 馬征,李耀明,徐立章. 農業工程領域顆粒運動研究綜述[J].農業機械學報,2013,44(2):22-29. Ma Zheng, Li Yaoming, Xu Lizhang. Summarize of particle movements research in agricultural engineering realm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(2): 22-29. (in Chinese with English abstract)
[26] 胡克吉. 氣力輸送系統文丘里供料器的研究[D]. 青島:青島科技大學,2013. Hu Keji. The Research on Venturi Feeder in Pneumatic Conceying System[D]. Qingdao: Qingdao University of Science & Technology, 2013. (in Chinese with English abstract)
[27] 佟飛虎. 文丘里管、文丘里噴嘴流量計的參數化設計[D].沈陽:東北大學,2007. Tong Feihu.The Parametric Design of Venturi Tube and Venturi Nozzle Flowmeter[D]. Shenyang: Northeastern University, 2007. (in Chinese with English abstract)
[28] 劉剴,陸海峰,郭曉鐳,等. 文丘里管結構對高濃度煤粉流動特征及壓差特性的影響[J]. 化工學報,2015(5):1656-1666. Liu Kai, Lu Haifeng, Guo Xiaolei, et al. Influence of venturi structures on flow characteristic and pressure drop of gas-coal mixture[J]. Journal of Chemical Industry and Engineering, 2015(5): 1656-1666. (in Chinese with English abstract)
[29] 于英杰,張書慧,齊江濤,等. 基于傳感器的變量施肥機定位方法[J]. 農業機械學報,2009,40(10):165-168. Yu Yingjie, Zhang Shuhui, Qi Jiangtao, et al.Positioning method of variable rate fertilizer applicator based on sensors[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(10): 165-168. (in Chinese with English abstract)
[30] 孟志軍,趙春江,劉卉,等. 基于處方圖的變量施肥作業系統設計與實現[J]. 江蘇大學學報:自然科學版,2009,30(4):338-342. Meng Zhijun, Zhao Chunjiang, Liu Hui, et al. Development and performance assessment of map-based variable rate granule application system[J].Journal of Jiangsu University: Natural Science Edition, 2009, 30(4): 338-342. (in Chinese with English abstract)
[31] 陳立平,黃文倩,孟志軍,等. 基于CAN總線的變量施肥控制器設計[J]. 農業機械學報,2008,39(8):101-104,185. Chen Liping, Huang Wenqian, Meng Zhijun, et al. Design of variable rate fertilization controller based on CAN bus[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 29(8): 101-104, 185. (in Chinese with English abstract)
Design and experiment on air-blast rice side deep precision fertilization device
Zuo Xingjian1,2,3,4, Wu Guangwei2,3,4, Fu Weiqiang2,3,4, Li Liwei2,3,4, Wei Xueli2,3,4, Zhao Chunjiang1,3※
(1. College of Mechanical and Electronic Engineering, Northwest A&F University, Yangling 712100, China; 2. National Research Center of Intelligent Equipment for Agriculture, Beijing 100097, China; 3. Key Laboratory of Agri-informatics, Ministry of Agriculture, Beijing 100097, China; 4. Beijing Key Laboratory of Intelligent Equipment Technology for Agriculture, Beijing 100097, China)
Abstract:Rice is the most important crop in China, which has the largest plant area, the highest per unit area yield and the most total output. Fertilization is an important process of rice production, which directly affects the yield of crops, and reasonable and effective use of chemical fertilizer can improve the yield of crops. At present, the mechanization level of rice fertilization is very low in China, and the artificial fertilization with a large amount of fertilizer causes the uneven distribution of fertilizer. The side deep fertilization for rice is an ideal way of fertilization. The fertilization device will apply fertilizer (basal and tiller fertilizer) quantitatively and with one-time positioning based on the agronomic requirements, and it can carry out a uniform fertilization to the rice’s side position with a certain depth, which can reduce nitrogen fertilizer amount of 20%-30% compared with the traditional fertilization operation. It is a cultivation technique with high output, stable yield and low cost. In view of the low-level mechanization of rice fertilization in China, the large amount of fertilizer application and the low fertilizer utilization in the traditional manual fertilization, combined with the agronomic characteristics of side deep fertilization, we analyzed the fertilization method of wind delivering and developed the air-blast rice side deep precision fertilization device. This device adopted the modularization design and was combined with riding type rice transplanter for use. In the process of operation, the fertilizer granules fell into the deep trench with a certain amount under the effect of gravity and wind; the trench with 5 cm depth was dug by fertilizer exports at the position 3 cm away from seedling side, and the fertilizers would be covered in the mud by covering plate. The device used the rated voltage of 12 V and the power of 72 W; the blower was used to transport fertilizer based on the Venturi effect, and the inner diameter of fertilizer conveying pipe was 25 mm and the velocity was 21 m/s; the global position system (GPS) was used to measure transplanter speed. The speed of the vehicle was proportional to the speed of the motor by using the precision fertilization control method, which could match the vehicle speed and drive motor speed in real time. The speed measurement closed-loop control was used as the control system. Motor drive used the AQMD2410NS direct current motor drive, and motor hold a stable speed by using the internal drive integration of the proportion-integration-differentiation (PID). The vehicle control terminal was designed under the embedded Visual C++ integrated development environment in the XP Windows operating system, the interface could display the current operating data, and meanwhile, the user could set the working parameters according to the actual operating requirements. When presetting fertilization amount to 300 kg/hm2, the motor rotation speed was 10, 20, 30 and 40 r/min, respectively. The fertilizer difference test with 6 fertilizer discharging ports was carried out, and the coefficients of variation of fertilizer application amount were 2.3%, 2.1%, 2.2% and 1.8%, respectively. The experiments were conducted on Heilongjiang Seven-star Farm, and the result showed, planting and fertilization could be done completely and independently in one time when fertilization device and riding type rice transplanter operated. When the preset rate of fertilization was 300 kg/hm2and the vehicle speed was 1 m/s, the fertilization device could realize the precision fertilization, and the deviation of fertilization application amount was within 5.82%, which could meet the requirement of the actual production. The research provides reference for the development of the rice variable fertilization control technology and the research and development of the rice side deep fertilization device.
Keywords:agricultural machinery; design; crops; air-assisted; precision fertilization; side deep fertilization
通信作者:※趙春江,男(漢族),河北定州,研究員,博士,博士生導師,主要從事農業信息化、精準農業技術的研究.。楊凌 西北農林科技大學機械與電子工程學院,712100。Email:zhaocj@nercita.org.cn
作者簡介:左興健,男(漢族),四川綿陽,主要從事精準農業智能裝備技術研究。楊凌 西北農林科技大學機械與電子工程學院,712100。
基金項目:863計劃糧食作物規模化生產精準作業技術與裝備(2012AA101901)
收稿日期:2015-08-15
修訂日期:2015-12-12
中圖分類號:S224.21
文獻標志碼:A
文章編號:1002-6819(2016)-03-0014-08
doi:10.11975/j.issn.1002-6819.2016.03.003
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
