基于北斗的車(chē)輛精確定位監(jiān)測(cè)系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
2016-03-22 11:20:53安徽四創(chuàng)電子股份有限公司梁本仁斯庭勇王世臣
電子世界 2016年1期
安徽四創(chuàng)電子股份有限公司 梁本仁 斯庭勇 王世臣
?
基于北斗的車(chē)輛精確定位監(jiān)測(cè)系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
安徽四創(chuàng)電子股份有限公司梁本仁斯庭勇王世臣
【摘要】以高速公路車(chē)輛監(jiān)測(cè)為例,提出了以北斗差分定位技術(shù)為核心,實(shí)現(xiàn)車(chē)輛厘米級(jí)實(shí)時(shí)定位,結(jié)合地理信息系統(tǒng)(GIS)、嵌入式系統(tǒng)及網(wǎng)絡(luò)等技術(shù)建立基于北斗的車(chē)輛精確定位監(jiān)測(cè)系統(tǒng)。論文利用雙頻相位觀測(cè)值的寬巷組合,采用LAMBDA方法快速固定整周模糊度,通過(guò)實(shí)驗(yàn)表明,該種方法在車(chē)輛精確定位中切實(shí)有效。
【關(guān)鍵詞】北斗差分定位;車(chē)輛監(jiān)測(cè);寬巷組合;LAMBDA;整周模糊度
1 引言
高速公路具有高效、快速、舒適、安全、方便等特征,帶來(lái)巨大的經(jīng)濟(jì)效益和社會(huì)效益。隨著我國(guó)高速公路的大量修建,因服務(wù)體系不到位造成高速公路交通擁堵和交通安全問(wèn)題日益突顯。同時(shí)在濃霧、大雨等天氣下,高速公路上駕駛員視線模糊,不易看見(jiàn)周?chē)?chē)輛行駛狀況,易造成交通事故。目前我國(guó)市場(chǎng)上的各種車(chē)載終端功能主要集中在定位及導(dǎo)航上,但定位精度不足以保證車(chē)輛的間距,以及無(wú)法顯示反饋周?chē)?chē)輛準(zhǔn)確信息,不能將安全隱患規(guī)避到最小,也做不到其他信息的共享與交互[2]。
北斗衛(wèi)星導(dǎo)航系統(tǒng)(簡(jiǎn)稱(chēng)北斗)是我國(guó)獨(dú)立自主研制的新一代衛(wèi)星導(dǎo)航定位系統(tǒng),具有全天候、應(yīng)用成本低,在軍民多個(gè)領(lǐng)域得到了廣泛的應(yīng)用[1]。目前北斗已經(jīng)發(fā)射19顆衛(wèi)星,可以向整個(gè)亞太地區(qū)提供免費(fèi)的授時(shí)、定位服務(wù)。利用北斗載波差分定位技術(shù)實(shí)現(xiàn)車(chē)輛實(shí)時(shí)厘米級(jí)定位,可以解決傳統(tǒng)車(chē)載終端衛(wèi)星定位精度不高的問(wèn)題。本文提出了以北斗差分定位技術(shù)為核心,結(jié)合地理信息系統(tǒng)、嵌入式系統(tǒng)、網(wǎng)絡(luò)等技術(shù)建設(shè)高速公路車(chē)輛精確定位監(jiān)測(cè)系統(tǒng)。該系統(tǒng)能夠顯示本車(chē)和附近車(chē)輛的實(shí)時(shí)位置并在終端地圖上實(shí)時(shí)更新,經(jīng)過(guò)通信鏈路傳輸位置、速度等關(guān)鍵信息,保證在濃霧、大雨等惡劣天氣情況下車(chē)輛安全行駛。
2 系統(tǒng)組成及工作原理
系統(tǒng)主要包括:車(chē)輛監(jiān)控平臺(tái)、北斗基準(zhǔn)參考站、車(chē)載北斗終端,通信傳輸鏈路。車(chē)輛監(jiān)控平臺(tái)用于接收車(chē)輛的位置信息,實(shí)時(shí)分析車(chē)輛間的距離及車(chē)速,并根據(jù)數(shù)據(jù)給出告警提示,同時(shí)能夠分析高速公路車(chē)輛行駛實(shí)時(shí)狀況。北斗基準(zhǔn)參考站播發(fā)本基站的觀測(cè)量信息,實(shí)現(xiàn)車(chē)載北斗終端高精度測(cè)量模塊的高精度定位測(cè)速。車(chē)載北斗終端實(shí)現(xiàn)車(chē)輛的高精度位置解算及使其具備顯示本車(chē)實(shí)時(shí)位置和附近車(chē)輛位置,并在導(dǎo)航終端地圖實(shí)時(shí)更新。系統(tǒng)框架如圖1所示。
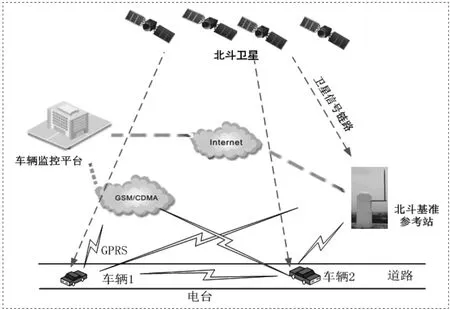
圖1 系統(tǒng)框架圖
整個(gè)系統(tǒng)運(yùn)行流程如下:
?北斗基準(zhǔn)參考站接收衛(wèi)星導(dǎo)航信號(hào),獲取當(dāng)前點(diǎn)位信息、觀測(cè)量信息和電文信息,并將信息以廣播的方式進(jìn)行播發(fā);
?車(chē)載北斗終端接收到基站播發(fā)的數(shù)據(jù),修正本車(chē)輛的位置和速度信息,實(shí)現(xiàn)車(chē)輛厘米級(jí)的高精度位置測(cè)量;
?北斗車(chē)載終端將本車(chē)輛的位置坐標(biāo)和速度信息傳輸至車(chē)輛監(jiān)控平臺(tái)及附近一定范圍內(nèi)車(chē)輛;
?車(chē)輛監(jiān)控平臺(tái)根據(jù)上報(bào)車(chē)輛的位置和速度信息,推算車(chē)輛間的安全距離及安全速度,并通知超過(guò)閾值的車(chē)輛,進(jìn)行實(shí)時(shí)告警和監(jiān)控。
?北斗車(chē)載終端通過(guò)本車(chē)輛及友鄰車(chē)輛的地圖位置顯示,直觀顯示車(chē)輛各類(lèi)信息。
3 車(chē)輛精確定位單歷元解算算法
本文利用國(guó)內(nèi)某廠商研制的OEM核心板卡,采用B1、B2頻點(diǎn)進(jìn)行試驗(yàn)仿真。由于高速車(chē)輛行駛速度快,一般達(dá)到120km/h,對(duì)車(chē)輛位置坐標(biāo)獲取的實(shí)時(shí)性要求嚴(yán)格,利用雙頻相位觀測(cè)值的寬巷組合波長(zhǎng)大特點(diǎn),采用LAMBDA(the least-squares ambiguity decorrelation adjustment)搜索方法首先固定寬巷模糊度[3]],待寬巷模糊度全部固定后,再解算B1、B2整周模糊度,最后得到單歷元基線向量,從而得到車(chē)輛精確位置坐標(biāo)。
3.1寬巷模糊度固定
本文利用寬巷觀測(cè)值波長(zhǎng)長(zhǎng),模糊度易確定特點(diǎn),以偽距和寬巷觀測(cè)值進(jìn)行最小二乘平差,然后搜索寬巷觀測(cè)值的整周模糊度以下為算法實(shí)現(xiàn)過(guò)程。
寬巷觀測(cè)值方程:

偽距雙差觀測(cè)方程為:

載波相位寬巷雙差觀測(cè)方程為:

雙差偽距和寬巷載波觀測(cè)方程可表示為:

利用上述方程進(jìn)行最小二乘求解:(5)

式中:

為提高模糊度精度,本文采用采用分組逐步固定模糊度,先選擇方差較小的模糊度組成主模糊度組[4],采用LAMBDA方法解算出主組整周模糊度。當(dāng)主模糊度組固定后,帶入方程求取較高精度的觀測(cè)值,回代雙差的觀測(cè)方程。用固定的寬巷模糊度更新觀測(cè)方程,改進(jìn)所有的參數(shù),再求取從模糊度實(shí)數(shù)解。利用LAMBDA方法,求得從模糊度組的固定解,進(jìn)而將寬巷模糊度組合固定下來(lái)[5]。
3.2雙差B1/B2模糊度固定
雙差寬巷模糊度固定后,雙差寬巷觀測(cè)值、載波B1觀測(cè)方程為:


B1和B2的雙差模糊度固定后進(jìn)而,利用高精度的載波觀測(cè)值進(jìn)行單歷元基線解算[6]。
3.3算法仿真
為了驗(yàn)證上述算法的正確性,本文采用兩塊帶有B1、B2頻率的OEM板卡,以及兩個(gè)北斗高精度天線,采集兩處的原始數(shù)據(jù),利用論文算法進(jìn)行單基線的測(cè)量解算。兩處數(shù)據(jù)采集點(diǎn)相距約5km,一處選擇在某12樓樓頂較空曠地域進(jìn)行數(shù)據(jù)采集,另一采集點(diǎn)選在某學(xué)校主教學(xué)樓樓頂。測(cè)試環(huán)境良好,視野寬闊,數(shù)據(jù)采樣率為1s。利用觀測(cè)到的北斗碼偽距和載波相位進(jìn)行單歷元姿態(tài)解算。選取其中330個(gè)歷元,根據(jù)本文算法進(jìn)行解算,如圖2所示,將每個(gè)歷元計(jì)算得到的X、Y、Z基線向量與各個(gè)分量的平均值做差。

圖2 基線偏差
計(jì)算X、Y、Z三個(gè)分量的內(nèi)符合精度σ1,σ2,σ3。計(jì)算公式為:

4 實(shí)例分析
選擇某大橋高速公路作為試驗(yàn)點(diǎn),該大橋正橋長(zhǎng)約17公里,在大橋未正式運(yùn)營(yíng)前,進(jìn)行設(shè)備安裝試驗(yàn)。
4.1基準(zhǔn)參考站建設(shè)
按照基準(zhǔn)站建設(shè)要求選擇基準(zhǔn)站點(diǎn),在選定試驗(yàn)的路段中間架設(shè)兩處基準(zhǔn)參考站,基準(zhǔn)站選擇應(yīng)考慮以下因素:
1)站址應(yīng)選在基礎(chǔ)堅(jiān)實(shí)穩(wěn)定,易于長(zhǎng)期保存,并有利于安全作業(yè)的地方, 年平均下沉和位移小于3mm。
2)站址應(yīng)避開(kāi)地質(zhì)構(gòu)造不穩(wěn)定區(qū)域,如:斷層破碎帶,易于發(fā)生滑坡、沉陷等局部變形的地點(diǎn)及地下水位變化較大的地點(diǎn)。
3)站址與周?chē)蠊β薀o(wú)線電發(fā)射源(如電視臺(tái)、電臺(tái)、微波站、通訊基站、變電所等)的距離應(yīng)大于200m;與高壓輸電線、微波通道的距離應(yīng)大于100m。
4)站址附近不應(yīng)有強(qiáng)烈干擾接收衛(wèi)星信號(hào)的物體
5)站址視場(chǎng)內(nèi)高度角大于10o的障礙物遮擋角累積不應(yīng)超過(guò)30o。
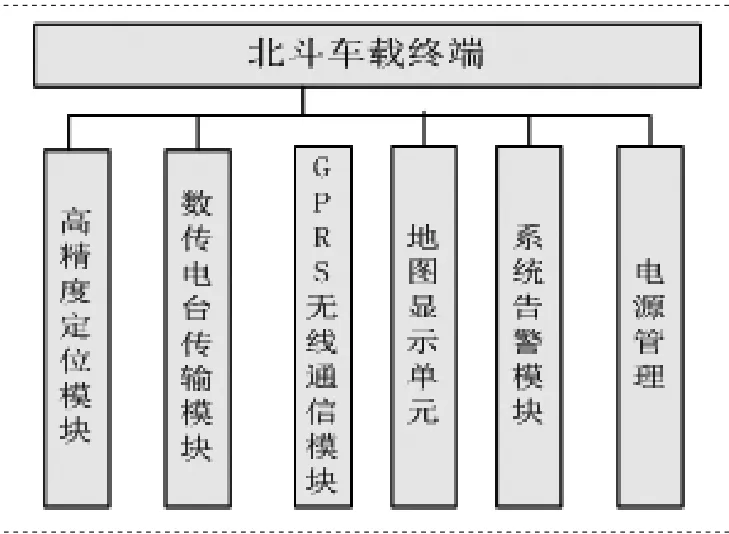
4.2車(chē)載北斗終端
終端主要包括:高精度定位模塊、車(chē)載電臺(tái)、無(wú)線傳輸模塊、地圖顯示模塊、顯控單元等。
4.3地圖數(shù)據(jù)獲取及開(kāi)發(fā)
由于一般的電子地圖精度無(wú)法滿足厘米級(jí)的定位精度指標(biāo),故該系統(tǒng)的地圖數(shù)據(jù)可以按相關(guān)測(cè)繪法規(guī)向特定單位進(jìn)行地圖數(shù)據(jù)采集申請(qǐng),申請(qǐng)后根據(jù)案例實(shí)際情況進(jìn)行地圖的采集及處理。論文中的地圖數(shù)據(jù)獲取是在基站、終端及通訊系統(tǒng)聯(lián)調(diào)成功之后,讓裝有北斗車(chē)載終端的車(chē)輛沿著試驗(yàn)路段緩慢行駛,采集POI點(diǎn)數(shù)據(jù),建立相對(duì)坐標(biāo)系,經(jīng)過(guò)數(shù)據(jù)處理,獲取導(dǎo)航地圖數(shù)據(jù)。顯控單元采用基于Android系統(tǒng)的平板,在此平臺(tái)上開(kāi)發(fā)地圖顯示等功能,實(shí)時(shí)顯示本車(chē)及周?chē)?chē)輛的位置信息。
5 結(jié)束語(yǔ)
論文做了以下工作:
1)將北斗差分定位技術(shù)應(yīng)用于車(chē)輛精確定位監(jiān)測(cè)系統(tǒng)中,實(shí)現(xiàn)車(chē)輛厘米級(jí)定位,解決一般車(chē)載定位終端定位精度不高,無(wú)法滿足在濃霧、大雨等視線不佳帶來(lái)的行車(chē)難及安全問(wèn)題。
2)同時(shí)論文利用雙頻相位觀測(cè)值的寬巷組合,采用LAMBDA搜索快速固定整周模糊度,并利用MATLAB進(jìn)行仿真實(shí)驗(yàn),實(shí)驗(yàn)表明,該種方法在車(chē)輛精確定位中切實(shí)有效。
3)以某公鐵大橋公路為例進(jìn)行系統(tǒng)建設(shè)說(shuō)明,從基準(zhǔn)站選址、北斗車(chē)載終端組成、高精度地圖獲取及開(kāi)發(fā)幾個(gè)方面進(jìn)行了簡(jiǎn)略闡述。該系統(tǒng)在一定程度上能夠緩解濃霧等惡劣天氣帶來(lái)的交通安全問(wèn)題。
參考文獻(xiàn)
[1]中國(guó)衛(wèi)星導(dǎo)航系統(tǒng)管理辦公室.北斗衛(wèi)星導(dǎo)航系統(tǒng)空間信號(hào)接口控制文件(2.0版)[R].中國(guó)衛(wèi)星導(dǎo)航系統(tǒng)管理辦公室,北京,2013.
[2]李華貴,項(xiàng)志華,何偉.基于GPS和GPRS車(chē)載導(dǎo)航定位系統(tǒng)的實(shí)現(xiàn)[J].計(jì)算機(jī)技術(shù)與發(fā)展,2006,11(16):242-245.
[3]唐衛(wèi)明,鄧辰龍,高麗峰.北斗單歷元基線解算算法研究及初步結(jié)果[J].武漢大學(xué)學(xué)報(bào)(信息科學(xué)版),2013,38(8):897-901.
[4]祝會(huì)忠,高星偉,秘金鐘.一種GPS整周模糊度單歷元解算方法[J].測(cè)繪科學(xué),2011,36(4):9-11.
[5]陽(yáng)仁貴,歐吉坤,任超.GPS單歷元載波相位整周模糊度的解算方法研究[J].長(zhǎng)江科學(xué)院院報(bào),2005,22(1):32-34.
[6]趙琳,劉玥.基于北斗多頻觀測(cè)量的載波相位差分精密定位技術(shù)研究[C].第四屆中國(guó)衛(wèi)星導(dǎo)航學(xué)術(shù)年會(huì)電子文集.
梁本仁(1982—),男,碩士,工程師,從事北斗導(dǎo)航、GNSS高精度測(cè)量、無(wú)線通信相關(guān)的技術(shù)研發(fā)工作。
斯庭勇(1987—),男,碩士,助理工程師,從事北斗導(dǎo)航、GNSS高精度測(cè)量相關(guān)的技術(shù)研發(fā)工作。
王世臣(1987—),男,碩士,助理工程師,從事通信導(dǎo)航、GNSS高精度測(cè)量相關(guān)的技術(shù)研發(fā)工作。
The Design and Implementation of Traffic Accurate Position monitoring based on Beidou Navigation Satellite System
Abstract:Taking an example of highway traffic monitoring,this paper puts forward a vehicle monitoring system,which is based on the Beidou differential positioning technology.The system realize a cm-level real-time location,it combined with the geographic information system (GIS)and embedded system and network technology to establish a accurate location based on Beidou.This paper using wide lane combination double-frequency phase observation value and LAMBDA ambiguity search quickly fixed the integer ambiguity,experiments show that this method is practical and effective in precise positioning.
Key words:Compass;traffic monitoring;Wide Lane Combination;LAMBDA;Integer Ambiguity
作者簡(jiǎn)介:
